Длина и расстояние Масса Меры объема сыпучих продуктов и продуктов питания Площадь Объем и единицы измерения в кулинарных рецептах Температура Давление, механическое напряжение, модуль Юнга Энергия и работа Мощность Сила Время Линейная скорость Плоский угол Тепловая эффективность и топливная экономичность Числа Единицы измерения количества информации Курсы валют Размеры женской одежды и обуви Размеры мужской одежды и обуви Угловая скорость и частота вращения Ускорение Угловое ускорение Плотность Удельный объем Момент инерции Момент силы Вращающий момент Удельная теплота сгорания (по массе) Плотность энергии и удельная теплота сгорания топлива (по объему) Разность температур Коэффициент теплового расширения Термическое сопротивление Удельная теплопроводность Удельная теплоёмкость Энергетическая экспозиция, мощность теплового излучения Плотность теплового потока Коэффициент теплоотдачи Объёмный расход Массовый расход Молярный расход Плотность потока массы Молярная концентрация Массовая концентрация в растворе Динамическая (абсолютная) вязкость Кинематическая вязкость Поверхностное натяжение Паропроницаемость Паропроницаемость, скорость переноса пара Уровень звука Чувствительность микрофонов Уровень звукового давления (SPL) Яркость Сила света Освещённость Разрешение в компьютерной графике Частота и длина волны Оптическая сила в диоптриях и фокусное расстояние Оптическая сила в диоптриях и увеличение линзы (×) Электрический заряд Линейная плотность заряда Поверхностная плотность заряда Объемная плотность заряда Электрический ток Линейная плотность тока Поверхностная плотность тока Напряжённость электрического поля Электростатический потенциал и напряжение Электрическое сопротивление Удельное электрическое сопротивление Электрическая проводимость Удельная электрическая проводимость Электрическая емкость Индуктивность Американский калибр проводов Уровни в dBm (дБм или дБмВт), dBV (дБВ), ваттах и др. единицах Магнитодвижущая сила Напряженность магнитного поля Магнитный поток Магнитная индукция Мощность поглощенной дозы ионизирующего излучения Радиоактивность. Радиоактивный распад Радиация. Экспозиционная доза Радиация. Поглощённая доза Десятичные приставки Передача данных Типографика и обработка изображений Единицы измерения объема лесоматериалов Вычисление молярной массы Периодическая система химических элементов Д. И. Менделеева
Исходная величина
Преобразованная величина
ньютон-метр ньютон-сантиметр ньютон-миллиметр килоньютон-метр дина-метр дина-сантиметр дина-миллиметр килограмм-сила-метр килограмм-сила-сантиметр килограмм-сила-миллиметр грамм-сила-метр грамм-сила-сантиметр грамм-сила-миллиметр унция-сила-фут унция-сила-дюйм фунт-сила фут фунт-сила дюйм
Подробнее о вращающем моменте
Общие сведения
Кода на тело действует сила в определенном направлении - тело поворачивается. Это стремление силы поворачивать тело описывается физической величиной - вращающим моментом или моментом силы. Сама сила, которая вызывает поворот или кручение, а также расстояние между точкой ее приложения и точкой вращения тела влияют на момент силы. В данном случае сила - векторная величина, поэтому важно также и направление силы, то есть угол между направлением силы и отрезком, соединяющим точку приложения силы и центр вращения тела. Если этот угол прямой, то есть сила приложена перпендикулярно отрезку, то момент силы - максимальный. По мере того, как сила становится параллельной отрезку, момент силы уменьшается. То есть, чем ближе угол к 0° или 180°, тем слабее момент силы, пока он не становится равным нулю, когда направление силы параллельно отрезку. Удобно представить момент силы, как комбинацию расстояния, на которое удалена сила от точки вращения, и силы, которая необходима, чтобы заставить тело вращаться с определенной интенсивностью.

Давайте посмотрим на эту взаимосвязь на иллюстрации. Здесь силы F2, F3 и F5 перпендикулярны отрезку между осью вращения, обозначенной голубым цветом в центре штурвала, и точкой приложения силы. Создаваемый ими момент силы - максимален. С другой стороны, силы F1 и F4 приложены под углом, отличным от 90°, и создаваемый ими момент силы не максимален. То есть, момент силы этих двух сил отличается от момента силы других трех сил, хотя величина всех сил на рисунке - одинакова.
Чтобы повернуть тело под воздействием силы с заданными условиями, необходимо создать момент силы. Так как эта величина зависит и от расстояния, и от силы, то для получения заданного момента можно изменять либо силу, либо расстояние от точки приложения до точки вращения. Люди используют эту зависимость испокон веков.
Использование момента силы в быту и технике
Обычно легче увеличить расстояние между телом и точкой приложения силы, чем саму силу. Поэтому чаще всего, когда силы человека или животного недостаточно для того или иного задания, которое включает вращение, используют рычаги и другие устройства, чтобы увеличить расстояние между силой и осью вращения, и тем самым увеличить момент силы. Например, чтобы повернуть мельницу или колесо, на которое наматывают цепь, чтобы поднять тяжелый мост, люди или животные вращают устройства с длинными ручками или рычагами. Длинные рычаги и ручки позволяют увеличить приложенное усилие. Это увеличение пропорционально расстоянию между осью вращения тела и точкой приложения силы.

Велосипедные педали
Момент силы используется также в педалях велосипедов. Чем дальше ступня от центра велосипедного колеса, тем меньше нужно силы, чтобы повернуть это колесо с помощью педали. Длина наших ног ограничивает максимальную длину педалей - если сделать педали длиннее, чем делают их сейчас на современных велосипедах, то крутить их будет неудобно. Несмотря на эти ограничения, педали сильно облегчают передвижение на велосипеде. Конструкция велосипедных педалей настолько удобна, что некоторые люди, особенно в развивающихся странах, где не всегда есть доступ к новейшей технике, используют велосипедные педали в конструкции других устройств, где нужно ножное или ручное управление. Иногда такие педали устанавливают на инвалидные коляски, чтобы облегчить ручное кручение колес. В этом случае можно немного удлинить педали, чтобы увеличить момент силы, хотя это может несколько затруднить управление коляской.
Гаечный ключ

Гаечные ключи используют момент силы, чтобы уменьшить силу, необходимую для затягивания или откручивания гайки или болта. Гаечный ключ сделан так, чтобы его удобно было держать, но в то же время его длинная ручка увеличивает силу, к нему приложенную, чтобы затянуть или открутить болт или гайку. Иногда достаточно маленького ключа с короткой ручкой, но в некоторых случаях нужна ручка длиннее, например, если мы пытаемся открутить заржавевшую гайку. Если под рукой не оказалось гаечного ключа, можно использовать плоскогубцы. Их длинные ручки создают достаточно высокий момент силы, хотя иногда они сжимают гайку или винт недостаточно сильно, и могут их повредить.

Удобство гаечного ключа в том, что когда он подобран по размеру к гайке, сила нужна только для того, чтобы повернуть ключ, но не для того, чтобы удерживать его на гайке. Плоскогубцы, наоборот, нужно удерживать вокруг гайки, чтобы они не сорвались, и на это тратится дополнительная сила. Именно поэтому во многих случаях гаечный ключ более экономичен с точки зрения затраченной энергии. С другой стороны, в некоторых случаях плоскогубцы удобнее - например их можно использовать под углом в труднодоступных местах, в то время как гаечный ключ часто работает только в одной плоскости с гайкой. Если откручивать гайку под наклоном, то момент силы уменьшится, но это лучше, чем совсем не иметь возможности ее отвернуть.
Аналогично работают и инструменты, предназначенные для отвинчивания крышек с законсервированных банок. Обычно это резиновый жгут, прикрепленный к ручке так, что жгут образует петлю, диаметр которой регулируется. Сама петля закрепляется на крышке и не влияет на момент силы, а вот ручка как раз помогает создать нужный момент. Чем она больше, тем больше момент силы. Благодаря ему, банку открыть намного легче, чем руками, с использованием полотенца или материала с высоким коэффициентом трения.
Маховик

Хороший пример устройства, которое использует момент силы - маховик. Момент силы приводит его в движение, а также помогает ускорить маховик и, благодаря этому движению, получить энергию. Маховик накапливает и хранит ее для дальнейшего использования. Если эта энергия нужна для других целей, то момент силы, наоборот, замедляет скорость маховика, и вырабатывается энергия, которую потом используют по назначению. Маховики используют в случае, если источник энергии работает в прерывистом режиме, а энергия нужна постоянно. Именно так используют маховики в двигателях автомобилей, где энергия выделяется «вспышками», при сгорании топлива.
![]()
В некоторых случаях нужен обратный эффект, то есть необходимо кратковременно подать большое количество энергии, обычно больше, чем источник энергии может выработать в течение заданного промежутка времени. В такой ситуации маховик на протяжении некоторого времени накапливает энергию, поступающую небольшими порциями, чтобы потом отдать нужное количество.
Качели и рычаги
Сила, с которой два ребенка надавливают на качели-балансир, когда сидят по обе стороны от центра, двигает эти качели вверх и вниз. То есть, при этом происходит частичное вращение качелей вокруг своей оси. Если вес обоих детей приблизительно одинаков, то они легко могут качаться на таких качелях. Детям разного веса намного труднее - более тяжелый ребенок тянет качели со своей стороны вниз, а более легкому ребенку не хватает веса, чтобы опустить качели в свою сторону. Это происходит потому, что вес тяжелого ребенка производит больший момент силы. Чтобы решить эту проблему, большому ребенку нужно пересесть ближе к центру настолько, насколько его вес превышает вес второго ребенка. Например, если большой ребенок в три раза тяжелее, то пересесть ему нужно в три раза ближе, и тогда качели придут в равновесие.
Рычаги действуют аналогично: момент силы в них используется для того, чтобы уменьшить силу, нужную для совершения определенной работы. Обычно рычаг - это продолговатый предмет, например ручка или планка, которая вращается вокруг точки, называемой центром вращения или точкой опоры. К другой точке рычага прикладывают силу, которая, благодаря длине рычага, увеличивается или уменьшается в зависимости от конструкции рычага и его назначения.
Рычаги делят на три рода, в зависимости от того, где точка опоры, как приложена сила , которая их поворачивает, и где приложена сила сопротивления . Обычно их называют рычагами первого, второго, и третьего рода. Иногда не совсем понятно, при чем тут сила сопротивления, но она действительно есть. Она противодействует силе, которая направлена на то, чтобы повернуть рычаг. Когда приложенная сила больше силы сопротивления, рычаг поворачивается. Мы, а также другие животные, используем эти принципы в организме, и части нашего тела становятся рычагами, как показано на примерах ниже.

Рычаг первого рода похож по конструкции на детские качели-балансир, описанные выше. точка опоры в них посередине, сила приложена на одном конце, а сопротивление возникает на другом конце. Ось вращения в рычаге второго рода находится с одного края рычага, и рядом с ним возникает сопротивление. Сила прилагается к такому рычагу на другом конце. Рычаг третьего рода устроен похоже, но ближе к центру вращения, находящемуся у конца рычага, не сопротивление, а сила, прикладываемая к рычагу. Сопротивление возникает на другом конце рычага.
Рычаги первого рода
Равноплечие весы с чашками - пример рычагов первого рода. Ножницы - тоже, только они состоят из двух рычагов, соединенных между собой. С их помощью намного легче, чем ножом, аккуратно разрезать некоторые материалы, например бумагу или ткань. Чем длиннее ручки, тем более толстые и твердые материалы можно разрезать. С другой стороны, чем дальше поместить от оси вращения материал, который нужно разрезать, тем труднее это сделать.

![]()
Чем толще материал, который нужно разрезать, тем больший момент силы необходим для этого, и тем длиннее должны быть ручки ножниц и прочнее материал, из которых они сделаны. В некоторых случаях к ножницам добавляют пружину, которая делает их более удобными в использовании. Так, например, устроен садовый секатор. Кроме этого у специализированных ножниц бывают и другие особенности. В медицине используют ножницы с закругленными, тупыми и острыми концами, в зависимости от их назначения. В отличие от скальпеля, ими удобнее работать и у них механическое преимущество над скальпелем, хотя скальпель тоже широко используется, так как в некоторых случаях он удобнее ножниц. Медицинские ножницы, предназначенные для использования врачами скорой помощи, закруглены на конце, чтобы можно было разрезать ими одежду, не повредив кожи. Некоторые медицинские ножницы - очень маленькие. Например, офтальмологические хирургические ножницы могут быть всего 6 сантиметров длиной, с лезвием до 2 сантиметров, и даже короче.
Лом-монтировку или лом-гвоздодер, называемый также «фомкой» тоже можно считать рычагом первого рода, хотя иногда, в зависимости от использования, он может быть и рычагом второго или третьего рода. Чаще всего его используют, чтобы вынуть забитые гвозди, или разобщить два предмета, соединенных клеем, гвоздями, скрепками, и аналогичными способами. Лом получил дурную репутацию, как инструмент воров, взломщиков, и других преступников, хотя на самом деле преступники используют любые подручные материалы и инструменты, лишь бы они помогли добиться конечного результата.
Пример рычага первого рода в организме людей и некоторых животных - голова. Она находится в равновесии на шее. Шея - центр вращения, сила мышц прилагается с одной стороны головы, сила сопротивления - с другой. Когда приложенная сила достаточно велика, голова наклоняется в сторону направления этой силы.

Рычаги второго рода
Примеры рычагов второго рода - челюсти людей и животных, и клювы птиц. Являются ими и щипцы для орехов, а также декоративные щелкунчики. Щипцы чаще всего делают из металла, хотя иногда встречаются изделия и из других материалов, например из дерева. Щелкунчики - стилизованные щипцы, сделанные из дерева, и украшенные наподобие кукол. Раньше их использовали по прямому назначению, но сейчас это по большей части украшения. Чаще всего их делают в форме солдат, королей, и других фигурок. В США и Канаде такие фигурки часто используют как новогодние украшения. Считается, что щелкунчиков начали делать в лесистых районах Германии. Их там делают на продажу как сувениры и до сих пор. Сейчас для расщепления орехов чаще всего используют обычные щипцы, а не щелкунчиков. Такие щипцы похожи на щипцы для расщепления клешней крабов и омаров. Кстати, сами крабовые и омаровые клешни - тоже рычаги второго ряда, и работают по тому же принципу, что и щипцы для орехов.

Чеснокодавилка - еще один пример рычагов второго ряда. По устройству она похожа на щипцы для орехов. Ее часто используют в быту, хотя некоторые повара предпочитают мелко резать чеснок, и считают, что чеснокодавилка портит вкус чеснока. Другие, наоборот, пользуются только чеснокодавилкой, так как вкус чеснока при ее использовании усиливается.
Ступня людей и некоторых животных - тоже рычаг второго типа. Точка опоры в этом случае в районе пальцев, мышцы ноги прикладывают силу около пятки, а сила сопротивления - это наш вес. Этот «рычаг» позволяет нам держать равновесие, а также подниматься и опускаться на пальцах.
Другие примеры рычагов второго класса - тачки, тормоза в автомобиле и двери. Если толкнуть дверь рядом с осью вращения, то она вряд ли откроется, но если толкать как можно дальше от этой оси, то даже тяжелая дверь легко поддается. Именно поэтому ручки делают со стороны, противоположной расположению петель. Чтобы даже тяжелую дверь было легко открывать, ее можно сделать шире.
Открывалки для бутылок - тоже рычаги второго класса, особенно те, что не прикреплены к стене, как в некоторых барах и ресторанах. В некоторых перочинных ножах имеются маленькие открывалки; также популярны брелки-открывалки. Если под рукой нет открывалки, то иногда получается использовать подручные материалы, например нож или вилку. Сами открывалки можно в некоторых случаях использовать, чтобы поддеть закрученную крышку на банке - если сделать это удачно, то банка легче откроется. Иногда открывалки используют как рычаги первого класса. В этом случае открывалку закрепляют на крышке иначе и давят на нее снизу, а не сверху, как с рычагами второго рода.

Рычаги третьего рода
Если поднимать рукой тяжелые предметы, сгибая локоть, то рука становится рычагом третьего рода. Во время бега и ходьбы, ноги тоже становятся рычагами. Точка опоры рычага в этом случае - в локтях и коленях. Если «продлить» руку инструментом, например бейсбольной битой или теннисной ракеткой, то опять получится рычаг третьего рода. Чтобы заставить этот рычаг двигаться, силу прикладывают возле центра вращения. При этом сопротивление образуется на другом конце. В случае с ракеткой и битой, сопротивление - в месте, где они соприкасаются с мячом. Удочка - тоже рычаг третьего рода, и сила прикладывается к ней в районе запястья.
Другие примеры рычагов третьего рода - молоток, и аналогичные инструменты, такие как лопаты, грабли, веники, и мухобойки. Некоторые инструменты состоят сразу из двух рычагов, действующих по направлению друг к другу. Так устроены, например, пинцет, степлер и щипцы.
Пример
Теперь давайте рассмотрим пример. Представим, что обычный человек среднего телосложения может поднять камень весом в 20 кг. Конечно, это будет нелегко, и придется сильно напрячь мышцы, но поднять такой камень вполне возможно. С другой стороны, маленький ребенок такой камень поднять не в состоянии. Если же дать ребенку достаточно длинный и прочный лом и научить его, как им пользоваться, то он справится с этой задачей, так как сила, нужная для того, чтобы поднять камень, намного уменьшится. Архимед говорил, что он может сдвинуть Землю, если встанет достаточно далеко от нее, и возьмет длинный рычаг. Это утверждение основано на таком же принципе. После того, как мы поднимем наш 20-ти-киллограммовый камень с помощью лома - рычага первого рода - мы можем погрузить его на тачку - рычаг второго рода - и отвезти, куда необходимо, поднимая за ручки руками - рычагами третьего рода.
Вы затрудняетесь в переводе единицы измерения с одного языка на другой? Коллеги готовы вам помочь. Опубликуйте вопрос в TCTerms и в течение нескольких минут вы получите ответ.
§ 92. Вращающий момент асинхронного двигателя
Вращающий момент асинхронного двигателя создается при взаимодействии вращающегося магнитного поля статора с токами в проводниках обмотки ротора. Поэтому вращающий момент зависит как от магнитного потока статора Φ, так и от силы тока в обмотке ротора I
2 . Однако в создании вращающего момента участвует только активная мощность, потребляемая машиной из сети. Вследствие этого вращающий момент зависит не от силы тока в обмотке ротора I
2 , а только от его активной составляющей, т. е. I
2 cos φ 2 , где φ 2 - фазный угол между э. д. с. и током в обмотке ротора.
Таким образом, вращающий момент асинхронного двигателя определяется следующим выражением:
M = C ΦI φ 2 cos φ 2 , (122)
где С
- конструктивная постоянная машины, зависящая от числа ее полюсов и фаз, числа витков обмотки статора, конструктивного выполнения обмотки и принятой системы единиц.
При условии постоянства приложенного напряжения и изменении нагрузки двигателя магнитный поток остается также почти постоянным.
Таким образом, в выражении вращающего момента величины С
и Φ постоянны и вращающий момент пропорционален только активной составляющей тока в обмотке ротора, т. е.
M ~ I 2 cos φ 2 . (123)
Изменение нагрузки или тормозного момента на валу двигателя, как уже известно, изменяет и скорость вращения ротора, и скольжение.
Изменение скольжения вызывает изменение как силы тока в роторе I
2 , так и ее активной составляющей I
2 cos φ 2 .
Можно силу тока в роторе определить отношением э. д. с. к полному сопротивлению, т. е. на основании закона Ома
где Z
2 , r
2 и x
2 - полное, активное и реактивное сопротивления фазы обмотки ротора,
E
2 - э. д. с. фазы обмотки вращающегося ротора.
Изменение скольжения изменяет частоту тока ротора. При неподвижном роторе (n
2 = 0 и S
= 1) вращающееся поле с одинаковой скоростью пересекает проводники обмотки статора и ротора и частота тока в роторе равна частоте тока сети (f
2 = f
1). При уменьшении скольжения обмотка ротора пересекается магнитным полем с меньшей частотой, вследствие чего частота тока в роторе уменьшается. Когда ротор вращается синхронно с полем (n
2 = n
1 и S
= 0), проводники обмотки ротора не пересекаются магнитным полем, так что частота тока в роторе равна нулю (f
2 = 0). Таким образом, частота тока в обмотке ротора пропорциональна скольжению, т. е.
f 2 = S f 1 .
Активное сопротивление обмотки ротора почти не зависит от частоты, тогда как э. д. с. и реактивное сопротивление пропорциональны частоте, т. е. изменяются с изменением скольжения и могут быть определены следующими выражениями:
E 2 = S E и X 2 = S X ,
где Е
и X
- э. д. с. и индуктивное сопротивление фазы обмотки для неподвижного ротора соответственно.
Таким образом, имеем:
и вращающий момент
Следовательно, при небольших скольжениях (примерно до 20%), когда реактивное сопротивление Х
2 = S X
мало по сравнению с активным r
2 , увеличение скольжения вызывает увеличение вращающего момента, так как при этом возрастает активная составляющая тока в роторе (I
2 cos φ 2). При больших скольжениях (S X
больше, чем r
2) увеличение скольжения будет вызывать уменьшение вращающего момента.
Таким образом, при увеличении скольжения (его больших значениях) хотя и повышается сила тока в роторе I
2 , но ее активная составляющая I
2 cos φ 2 и, следовательно, вращающий момент уменьшаются вследствие значительного возрастания реактивного сопротивления обмотки ротора.
На рис. 115 показана зависимость вращающего момента от скольжения. При некотором скольжении S
m
(примерно 12 - 20%) двигатель развивает максимальный момент, который определяет перегрузочную способность двигателя и обычно в 2 - 3 раза превышает номинальный момент.

Устойчивая работа двигателя возможна только на восходящей ветви кривой зависимости момента от скольжения, т. е. при изменении скольжения в пределах от 0 до S
m
. Работа двигателя на нисходящей ветви указанной кривой, т. е. при скольжении S
> S
m
, невозможна, так как здесь не обеспечивается устойчивое равновесие моментов.
Если предположить, что вращающий момент был равен тормозному (M
вр = M
торм) в точках A
и Б
, то при случайном нарушении равновесия моментов в одном случае оно восстанавливается, а в другом не восстанавливается.
Допустим, что вращающий момент двигателя почему-либо уменьшился (например, при понижении напряжения сети), тогда скольжение начнет увеличиваться. Если равновесие моментов было в точке А
, то увеличение скольжения вызовет возрастание вращающего момента двигателя и он станет вновь равным тормозному моменту, т. е. равновесие моментов восстановится при возросшем скольжении. Если же равновесие моментов было в точке Б
, то увеличение скольжения вызовет уменьшение вращающего момента, который будет оставаться всегда меньше тормозного, т. е. равновесие моментов не восстановится и скорость вращения ротора будет непрерывно уменьшаться до полной остановки двигателя.
Таким образом, в точке А
машина будет работать устойчиво, а в точке Б
устойчивая работа невозможна.
Если приложить к валу двигателя тормозной момент, больший максимального, то равновесие моментов не восстановится и ротор двигателя остановится.
Вращающий момент двигателя пропорционален квадрату приложенного напряжения, так как пропорциональны напряжению как магнитный поток, так и сила тока в роторе. Поэтому изменение напряжения в сети вызывает изменение вращающего момента.
· Момент силы. Рис.
Момент силы. Рис.
Момент силы, величина, характеризующая вращательный эффект силы при действии её на твёрдое тело; является одним из основных понятий механики. Различают М. с. относительно центра (точки) и относительно оси.
М. с. относительно центра О величина векторная. Его модуль M o = Fh , где F - модуль силы, a h - плечо, т. е. длина перпендикуляра, опущенного из О на линию действия силы (см. рис. ); направлен вектор M o перпендикулярно плоскости, проходящей через центр О и силу, в сторону, откуда поворот, совершаемый силой, виден против хода часовой стрелки (в правой системе координат). С помощью векторного произведения М. с. выражается равенством M o = [rF ], где r - радиус-вектор, проведённый из О в точку приложения силы. Размерность М. с. - L 2 MT 2 , единицы измерения - н ×м, дин ×см (1 н ×м = 10 7 дин ×см ) или кгс ×м.
М. с. относительно оси величина алгебраическая, равная проекции на эту ось М. с. относительно любой точки О оси или же численной величине момента проекции Р ху силы F на плоскость ху , перпендикулярную оси z , взятого относительно точки пересечения оси с плоскостью. Т. е.
M z = M o cos g = ± F xy h 1 .
Знак плюс в последнем выражении берётся, когда поворот силы F с положительного конца оси z виден против хода часовой стрелки (тоже в правой системе). М. с. относительно осей x, y, z могут также вычисляться по формулам:
M x = yF z - zF y , M y = zF x - xF z , M z = xF y - yF x ,
где F x , F y , F z - проекции силы F на оси; х, у, z - координаты точки А приложения силы.
Если система сил имеет равнодействующую, то её момент вычисляется по Вариньона теореме.
Вращательный момент - Момент силы (синонимы: крутящий момент; вращательный момент; вращающий момент) физическая величина, характеризующая вращательное действие силы на твёрдое тело. Момент силы приложенный к гаечному ключу Отношение между векторами силы, момента силы.
Конец работы -
Эта тема принадлежит разделу:
Недоказанная и неопровергнутая гипотеза называется открытой проблемой
Физика тесно связана с математикой математика предоставляет аппарат с помощью которого физические законы могут быть точно сформулированы... Тео рия греч рассмотрение... Стандартный метод проверки теорий прямая экспериментальная проверка эксперимент критерий истины Однако часто...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ:
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Все темы данного раздела:
Принцип относительности в механике
Инерциальные системы отсчета и принцип относительности.
Преобразования Галилея. Инварианты преобразования. Абсолютные и
относительные скорости и ускорения. Постулаты специальной т
Векторная величина
Векторная величина (вектор) – это физическая величина, которая имеет две характеристики – модуль и направление в пространстве.
Примеры векторных величин: скорость (
Вращательное движение материальной точки.
Вращательное движение материальной точки - движение материальной точки по окружности.
Враща́тельное движе́ние - вид механического движения. При
Связь между векторами линейной и угловой скоростей, линейного и углового ускорений.
Мера вращательного движения: угол φ, на который поверн.тся радиус-вектор точки в плоскости, нормальной к оси вращения.
Равномерное вращательное движен
Скорость и ускорение при криволинейном движении.
Криволинейное движение более сложный вид движения, чем прямолинейное, поскольку даже если движение происходит на плоскости, то изменяются две координаты, характеризующие положение тела. Скорость и
Ускорение при криволинейном движении.
Рассматривая криволинейное движение тела, мы видим, что его скорость в разные моменты различна. Даже в том случае, когда величина скорости не меняется, все же имеет место изменение направления скор
Уравнение движения Ньютона
(1)
где сила F в общем случа
Центр масс
центр инерции, геометрическая точка, положение которой характеризует распределение масс в теле или механической системе. Координаты Ц. м. определяются формулами
Закон движения центра масс.
Воспользовавшись законом изменения импульса, получим закон движения центра масс:
dP/dt = M∙dVc/dt = ΣFi
Центр масс системы движется так же, как дв
Галилея принцип относительности
· Инерциальная система отсчёта
Инерциальная система отсчёта
Галилея
Пластическая деформация
Согнем немного стальную пластинку (например, ножовку), а затем через некоторое время отпустим ее. Мы увидим, что ножовка полностью (во всяком случае на взгляд) восстановит свою форму. Если возьмем
ВНЕШНИЕ И ВНУТРЕННИЕ СИЛЫ
. В механике внешними силами по отношению к данной системе материальных точек (т. е. такой совокупности материальных точек, в которой движение каждой точки зависит от положений или движений всех ос
Кинетическая энергия
энергия механической системы, зависящая от скоростей движения её точек. К. э. Т материальной точки измеряется половиной произведения массы m этой точки на квадрат её скорости
Кинетическая энергия.
Кинетическая энергия - энергия движущегося тела.(От греческого слова kinema - движение). По определению кинетическая энергия покоящегося в данной системе отсчета
Величина, равная половине произведения массы тела на квадрат его скорости.
=Дж.
Кинетическая энергия - величина относительная, зависящая от выбора СО, т.к. скорость тела зависит от выбора СО.
Т.о.
Кинетическая энергия вращающегося тела
Кинетическая энергия – величина аддитивная. Поэтому кинетическая энергия тела, движущегося произвольным образом, равна сумме кинетических энергий всех n материаль
Работа и мощность при вращении твердого тела.
Работа и мощность при вращении твердого тела.
Найдем выражение для работы при вра
Основное уравнение динамики вращательного движения
Согласно уравнению (5.8) второй закон Ньютона для вращательного движения
П
Мощность и вращающий момент электродвигателя
Данная глава посвящена вращающему моменту: что это такое, для чего он нужен и др. Мы также разберём типы нагрузок в зависимости от моделей насосов и соответствие между электродвигателем и нагрузкой насоса.
Вы когда-нибудь пробовали провернуть вал пустого насоса руками? Теперь представьте, что вы поворачиваете его, когда насос заполнен водой. Вы почувствуете, что в этом случае, чтобы создать вращающий момент, требуется гораздо большее усилие.
А теперь представьте, что вам надо крутить вал насоса несколько часов подряд. Вы бы устали быстрее, если бы насос был заполнен водой, и почувствовали бы, что потратили намного больше сил за тот же период времени, чем при выполнении тех же манипуляций с пустым насосом. Ваши наблюдения абсолютно верны: требуется большая мощность, которая является мерой работы (потраченной энергии) в единицу времени. Как правило, мощность стандартного электродвигателя выражается в кВт.

Вращающий момент (T) - это произведение силы на плечо силы. В Европе он измеряется в Ньютонах на метр (Нм).
Как видно из формулы, вращающий момент увеличивается, если возрастает сила или плечо силы - или и то и другое. Например, если мы приложим к валу силу в 10 Н, эквивалентную 1 кг, при длине рычага (плече силы) 1 м, в результате, вращающий момент будет 10 Нм. При увеличении силы до 20 Н или 2 кг, вращающий момент будет 20 Нм. Таким же образом, вращающий момент был бы 20 Нм, если бы рычаг увеличился до 2 м, а сила составляла 10 Н. Или при вращающем моменте в 10 Нм с плечом силы 0,5 м сила должна быть 20 Н.

Работа и мощность
Теперь остановимся на таком понятии как «работа», которое в данном контексте имеет особое значение. Работа совершается всякий раз, когда сила - любая сила - вызывает движение. Работа равна силе, умноженной на расстояние. Для линейного движения мощность выражается как работа в определённый момент времени.
Если мы говорим о вращении, мощность выражается как вращающий момент (T), умноженный на частоту вращения (w).
![]()
Частота вращения объекта определяется измерением времени, за которое определённая точка вращающегося объекта совершит полный оборот. Обычно эта величина выражается в оборотах в минуту, т.е. мин-1 или об/мин. Например, если объект совершает 10 полных оборотов в минуту, это означает, что его частота вращения: 10 мин-1 или 10 об/мин.

Итак, частота вращения измеряется в оборотах в минуту, т.е. мин-1.
Приведем единицы измерения к общему виду.
Для наглядности возьмём разные электродвигатели, чтобы более подробно проанализировать соотношение между мощностью, вращающим моментом и частотой вращения. Несмотря на то, что вращающий момент и частота вращения электродвигателей сильно различаются, они могут иметь одинаковую мощность.

Например, предположим, что у нас 2-полюсный электродвигатель (с частотой вращения 3000 мин-1) и 4-полюсной электродвигатель (с частотой вращения 1500 мин-1). Мощность обоих электродвигателей 3,0 кВт, но их вращающие моменты отличаются.

Таким образом, вращающий момент 4-полюсного электродвигателя в два раза больше вращающего момента двухполюсного электродвигателя с той же мощностью.
Как образуется вращающий момент и частота вращения?
Теперь, после того, как мы изучили основы вращающего момента и скорости вращения, следует остановиться на том, как они создаются.
В электродвигателях переменного тока вращающий момент и частота вращения создаются в результате взаимодействия между ротором и вращающимся магнитным полем. Магнитное поле вокруг обмоток ротора будет стремиться к магнитному полю статора. В реальных рабочих условиях частота вращения ротора всегда отстаёт от магнитного поля. Таким образом, магнитное поле ротора пересекает магнитное поле статора и отстает от него и создаёт вращающий момент. Разницу в частоте вращения ротора и статора, которая измеряется в %, называют скоростью скольжения.

Скольжение является основным параметром электродвигателя, характеризующий его режим работы и нагрузку. Чем больше нагрузка, с которой должен работать электродвигатель, тем больше скольжение.
Помня о том, что было сказано выше, разберём ещё несколько формул. Вращающий момент индукционного электродвигателя зависит от силы магнитных полей ротора и статора, а также от фазового соотношения между этими полями. Это соотношение показано в следующей формуле:
Сила магнитного поля, в первую очередь, зависит от конструкции статора и материалов, из которых статор изготовлен. Однако напряжение и частота тока также играют важную роль. Отношение вращающих моментов пропорционально квадрату отношения напряжений, т.е. если подаваемое напряжение падает на 2%, вращающий момент, следовательно, уменьшается на 4%.

Ток ротора индуцируется через источник питания, к которому подсоединён электродвигатель, а магнитное поле частично создаётся напряжением. Входную мощность можно вычислить, если нам известны данные источника питания электродвигателя, т.е. напряжение, коэффициент мощности, потребляемый ток и КПД.
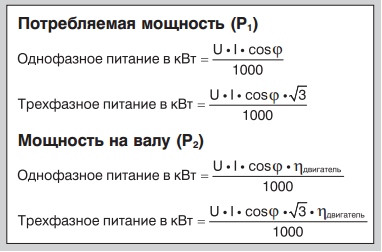
В Европе мощность на валу обычно измеряется в киловаттах. В США мощность на валу измеряется в лошадиных силах (л.с.).
Если вам необходимо перевести лошадиные силы в киловатты, просто умножьте соответствующую величину (в лошадиных силах) на 0,746. Например, 20 л.с. равняется (20 0,746) = 14,92 кВт.
И наоборот, киловатты можно перевести в лошадиные силы умножением величины в киловаттах на 1,341. Это значит, что 15 кВт равняется 20,11 л.с.
Момент электродвигателя
Мощность [кВт или л.с.] связывает вращающий момент с частотой вращения, чтобы определить общий объём работы, который должен быть выполнен за определённый промежуток времени.
Рассмотрим взаимодействие между вращающим моментом, мощностью и частотой вращения, а также их связь с электрическим напряжением на примере электродвигателей Grundfos. Электродвигатели имеют одну и ту же номинальную мощность как при 50 Гц, так и при 60 Гц.

Это влечёт за собой резкое снижение вращающего момента при 60 Гц: частота 60 Гц вызывает 20%-ное увеличение числа оборотов, что приводит к 20%-ному уменьшению вращающего момента. Большинство производителей предпочитают указывать мощность электродвигателя при 60 Гц, таким образом, при снижении частоты тока в сети до 50 Гц электродвигатели будут обеспечивать меньшую мощность на валу и вращающий момент. Электродвигатели обеспечивают одинаковую мощность при 50 и 60 Гц.
Графическое представление вращающего момента электродвигателя изображено на рисунке.

Иллюстрация представляет типичную характеристику вращающий момент/частота вращения. Ниже приведены термины, используемые для характеристики вращающего момента электродвигателя переменного тока.
Пусковой момент (Мп): Механический вращающий момент, развиваемый электродвигателем на валу при пуске, т.е. когда через электродвигатель пропускается ток при полном напряжении, при этом вал застопорен.
Минимальный пусковой момент (Ммин): Этот термин используется для обозначения самой низкой точки на кривой вращающий момент/частота вращения электродвигателя, нагрузка которого увеличивается до полной скорости вращения. Для большинства электродвигателей Grundfos величина минимального пускового момента отдельно не указывается, так как самая низкая точка находится в точке заторможенного ротора. В результате для большинства электродвигателей Grundfos минимальный пусковой момент такой же, как пусковой момент.
Блокировочный момент (Мблок): Максимальный вращающий момент - момент, который создаёт электродвигатель переменного тока с номинальным напряжением, подаваемым при номинальной частоте, без резких скачков скорости вращения. Его называют предельным перегрузочным моментом или максимальным вращающим моментом.
Вращающий момент при полной нагрузке (Мп.н.): Вращающий момент, необходимый для создания номинальной мощности при полной нагрузке.
Нагрузка насосов и типы нагрузки электродвигателя
Выделяют следующие типы нагрузок:
Постоянная мощность
Термин «постоянная мощность» используется для определённых типов нагрузки, в которых требуется меньший вращающий момент при увеличении скорости вращения, и наоборот. Нагрузки при постоянной мощности обычно применяются в металлообработке, например, сверлении, прокатке и т.п.

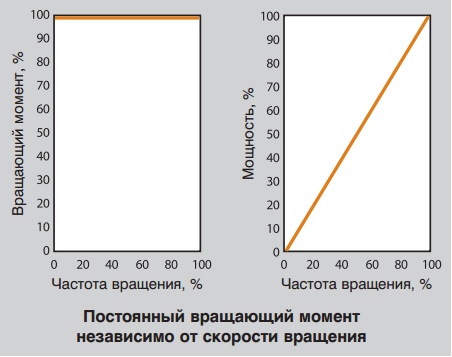
Постоянный вращающий момент
Как видно из названия - «постоянный вращающий момент» - подразумевается, что величина вращающего момента, необходимого для приведения в действие какого- либо механизма, постоянна, независимо от скорости вращения. Примером такого режима работы могут служить конвейеры.
Переменный вращающий момент и мощность
«Переменный вращающий момент» - эта категория представляет для нас наибольший интерес. Этот момент имеет отношение к нагрузкам, для которых требуется низкий вращающий момент при низкой частоте вращения, а при увеличении скорости вращения требуется более высокий вращающий момент. Типичным примером являются центробежные насосы.
Вся остальная часть данного раздела будет посвящена исключительно переменному вращающему моменту и мощности.
Определив, что для центробежных насосов типичным является переменный вращающий момент, мы должны проанализировать и оценить некоторые характеристики центробежного насоса. Использование приводов с переменной частотой вращения обусловлено особыми законами физики. В данном случае это законы подобия , которые описывают соотношение между разностями давления и расходами.

Во-первых, подача насоса прямо пропорциональна частоте вращения. Это означает, что если насос будет работать с частотой вращения на 25% больше, подача увеличится на 25%.
Во-вторых, напор насоса будет меняться пропорционально квадрату изменения скорости вращения. Если частота вращения увеличивается на 25%, напор возрастает на 56%.
В-третьих, что особенно интересно, мощность пропорциональна кубу изменения скорости вращения. Это означает, что если требуемая частота вращения уменьшается на 50%, это равняется 87,5%-ному уменьшению потребляемой мощности.
Итак, законы подобия объясняют, почему использование приводов с переменной частотой вращения более целесообразно в тех областях применения, где требуются переменные значения расхода и давления. Grundfos предлагает ряд электродвигателей со встроенным частотным преобразователем, который регулирует частоту вращения для достижения именно этой цели.
Так же как подача, давление и мощность, потребная величина вращающего момента зависит от скорости вращения.
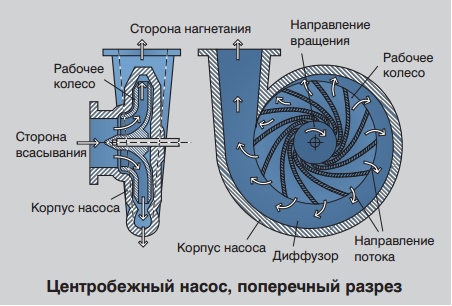
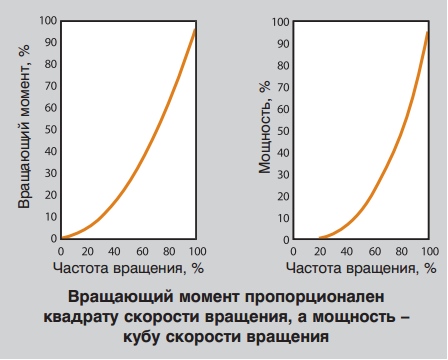
На рисунке показан центробежный насос в разрезе. Требования к вращающему моменту для такого типа нагрузки почти противоположны требованиям при «постоянной мощности». Для нагрузок при переменном вращающем моменте потребный вращающий момент при низкой частоте вращения - мал, а потребный вращающий момент при высокой частоте вращения - велик. В математическом выражении вращающий момент пропорционален квадрату скорости вращения, а мощность - кубу скорости вращения.
Это можно проиллюстрировать на примере характеристики вращающий момент/частота вращения, которую мы использовали ранее, когда рассказывали о вращающем моменте электродвигателя:
Когда электродвигатель набирает скорость от нуля до номинальной скорости, вращающий момент может значительно меняться. Величина вращающего момента, необходимая при определённой нагрузке, также изменяется с частотой вращения. Чтобы электродвигатель подходил для определённой нагрузки, необходимо чтобы величина вращающего момента электродвигателя всегда превышала вращающий момент, необходимый для данной нагрузки.

В примере, центробежный насос при номинальной нагрузке имеет вращающий момент, равный 70 Нм, что соответствует 22 кВт при номинальной частоте вращения 3000 мин-1. В данном случае насосу при пуске требуется 20% вращающего момента при номинальной нагрузке, т.е. приблизительно 14 Нм. После пуска вращающий момент немного падает, а затем, по мере того, как насос набирает скорость, увеличивается до величины полной нагрузки.
Очевидно, что нам необходим насос, который будет обеспечивать требуемые значения расход/напор (Q/H). Это значит, что нельзя допускать остановок электродвигателя, кроме того, электродвигатель должен постоянно ускоряться до тех пор, пока не достигнет номинальной скорости. Следовательно, необходимо, чтобы характеристика вращающего момента совпадала или превышала характеристику нагрузки на всём диапазоне от 0% до 100% скорости вращения. Любой «избыточный» момент, т.е. разница между кривой нагрузки и кривой электродвигателя, используется как ускорение вращения.
Соответствие электродвигателя нагрузке
Если нужно определить, отвечает ли вращающий момент определённого электродвигателя требованиям нагрузки, Вы можете сравнить характеристики скорости вращения/вращающего момента электродвигателя с характеристикой скорости вращения/ вращающего момента нагрузки. Вращающий момент, создаваемый электродвигателем, должен превышать потребный для нагрузки вращающий момент, включая периоды ускорения и полной скорости вращения.
Характеристика зависимости вращающего момента от скорости вращения стандартного электродвигателя и центробежного насоса.

Если мы посмотрим на характеристику, то увидим, что при ускорении электродвигателя его пуск производится при токе, соответствующем 550% тока полной нагрузки.

Когда двигатель приближается к своему номинальному значению скорости вращения, ток снижается. Как и следовало ожидать, во время начального периода пуска потери на электродвигателе высоки, поэтому этот период не должен быть продолжительным, чтобы не допустить перегрева.
Очень важно, чтобы максимальная скорость вращения достигалась как можно точнее. Это связано с потребляемой мощностью: например, увеличение скорости вращения на 1% по сравнению со стандартным максимумом приводит к 3%-ному увеличению потребляемой мощности.
Потребляемая мощность пропорциональна диаметру рабочего колеса насоса в четвертой степени.
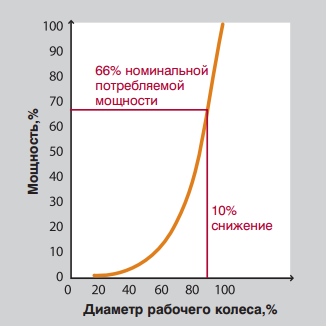
Уменьшение диаметра рабочего колеса насоса на 10% приводит к уменьшению потребляемой мощности на (1- (0.9 * 0.9 * 0.9 * 0.9)) * 100 = 34%, что равно 66% номинальной мощности. Эта зависимость определяется исключительно на практике, так как зависит от типа насоса, конструкции рабочего колеса и от того, насколько вы уменьшаете диаметр рабочего колеса.
Время пуска электрдвигателя
Если нам необходимо подобрать типоразмер электродвигателя для определённой нагрузки, например для центробежных насосов, основная наша задача состоит в том, чтобы обеспечить соответствующий вращающий момент и мощность в номинальной рабочей точке, потому что пусковой момент для центробежных насосов довольно низкий. Время пуска достаточно ограниченно, так как вращающий момент довольно высокий.

Нередко для сложных систем защиты и контроля электродвигателей требуется некоторое время для их пуска, чтобы они могли замерить пусковой ток электродвигателя. Время пуска электродвигателя и насоса рассчитывается с помощью следующей формулы:
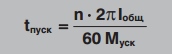
tпуск = время, необходимое электродвигателю насоса, чтобы достичь частоты вращения при полной нагрузке
n = частота вращения электродвигателя при полной нагрузке
Iобщ = инерция, которая требует ускорения, т.е. инерция вала электродвигателя, ротора, вала насоса и рабочих колёс.
Момент инерции для насосов и электродвигателей можно найти в соответствующих технических данных.
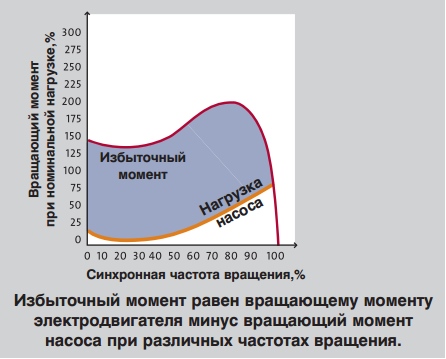
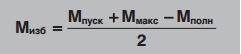
Мизб = избыточный момент, ускоряющий вращение. Избыточный момент равен вращающему моменту электродвигателя минус вращающий момент насоса при различных частотах вращения.


Как видно из приведённых вычислений, выполненных для данного примера с электродвигателем мощностью 4 кВт насоса CR, время пуска составляет 0,11 секунды.
Число пусков электродвигателя в час
Современные сложные системы управления электродвигателями могут контролировать число пусков в час каждого конкретного насоса и электродвигателя. Необходимость контроля этого параметра состоит в том, что каждый раз, когда осуществляется пуск электродвигателя с последующим ускорением, отмечается высокое потребление пускового тока. Пусковой ток нагревает электродвигатель. Если электродвигатель не остывает, продолжительная нагрузка от пускового тока значительно нагревает обмотки статора электродвигателя, что приводит к выходу из строя электродвигателя или сокращению срока службы изоляции.
Обычно за количество пусков, которое может выполнить электродвигатель в час, отвечает поставщик электродвигателя. Например, Grundfos указывает максимальное число пусков в час в технических данных на насос, так как максимальное количество пусков зависит от момента инерции насоса.
Мощность и КПД (eta) электродвигателя
Существует прямая связь между мощностью, потребляемой электродвигателем от сети, мощностью на валу электродвигателя и гидравлической мощностью, развиваемой насосом.
При производстве насосов используются следующие обозначения этих трёх различных типов мощности.

P1 (кВт) Входная электрическая мощность насосов - это мощность, которую электродвигатель насоса получает от источника электрического питания. Мощность P! равна мощности P2, разделённой на КПД электродвигателя.
P2 (кВт) Мощность на валу электродвигателя - это мощность, которую электродвигатель передает на вал насоса.
Р3 (кВт) Входная мощность насоса = P2, при условии, что соединительная муфта между валами насоса и электродвигателя не рассеивает энергию.
Р4 (кВт) Гидравлическая мощность насоса.
Принцип действия асинхронного двигателя, как указывалось, основан на взаимодействии вращающегося поля и тока, индуктированного этим полем в обмотке ротора.
В результате взаимодействия магнитного потока Φ с током I 2 , протекающим в проводниках обмотки ротора, возникают электромагнитные силы, приводящие ротор во вращение.
Поэтому вращающий момент, создаваемый на валу двигателя, зависит от величины тока ротора I 2 и от магнитного потока Φ.
Кроме того, на величину вращающего момента асинхронного двигателя влияет сдвиг фаз Ψ 2 между током I 2 и э.д.с. ротора. Для уяснения влияния cos Ψ 2 рассмотрим картину электромагнитных сил, действующих на проводники ротора.
Рассмотрим сначала случай, когда индуктивность обмотки ротора мала и поэтому сдвигом фаз между током и э.д.с. можно пренебречь (рис. 255, а). Вращающееся магнитное поле статора здесь заменено полем полюсов N и S, вращающимся, предположим, по направлению часовой стрелки. Пользуясь правилом "правой руки", определяем направление э.д.с. и токов в обмотке ротора. Токи ротора, взаимодействуя с вращающимся магнитным полем, создают момент вращения. Направления сил, действующих на проводники с током, определяются по правилу "левой руки". Как видно из чертежа, ротор под действием электромагнитных сил будет вращаться в ту же сторону, что и само вращающееся поле, т. е. по часовой стрелке.
Рассмотрим второй случай, когда индуктивность обмотки ротора относительно велика. В этом случае сдвиг фаз между током ротора I 2 и э.д.с. ротора будет также значительным. На рис. 255, б магнитное поле статора асинхронного двигателя по-прежнему показано в виде вращающихся по направлению часовой стрелки полюсов N и S. Направление индуктированной в обмотке ротора э.д.с. остается таким же, как и на рис. 255, а, но вследствие запаздывания тока по фазе максимум тока I 2 наступает позднее, чем максимум э.д.с.
На рис. 255 показано направление индуктированных токов в отдельных проводниках ротора в рассматриваемый момент времени, а также направления отдельных электромагнитных сил, действующих на проводники. Если Ψ 2 = 0, то все электромагнитные силы будут действовать согласованно. При большем Ψ 2 часть электромагнитных сил создают вращающий момент, направленный по часовой стрелке, а остальные силы - против часовой стрелки.
Магнитный поток Φ не зависит от скорости вращения ротора n. Следовательно, вращающий момент М пропорционален только активной составляющей тока ротора I 2 cos Ψ 2 . Индуктивное сопротивление ротора Х 2 = 2πfL 2 , а следовательно, и величина cos Ψ 2 зависят от частоты тока ротора f 2 и поэтому с изменением нагрузки на валу ротора изменяется не только величина тока I 2 , но и величина cos Ψ 2 . Таким образом, изменение вращающего момента, развиваемого двигателем, с изменением скорости вращения (и скольжения) определяется одновременно как изменением тока I 2 , так и изменением cos Ψ 2 .
На основании математического анализа и экспериментального исследования можно построить график зависимости вращающего момента асинхронного двигателя М от скольжения S (рис. 256). Так как каждому значению S соответствует определенное значение n = n 0 (1 - S), то указанный график можно представить и как зависимость вращающего момента от скорости n. Зависимость между вращающим моментом М и скольжением S называется механической характеристикой двигателя (рис. 256).
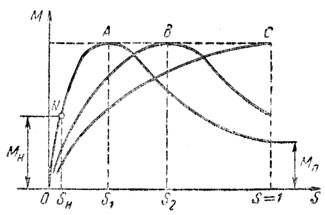
На кривой А видно, что в начальный момент пуска, когда S = 1 и n = 0, вращающий пусковой момент двигателя относительно невелик. Это объясняется тем, что в момент пуска частота тока в обмотке ротора наибольшая и индуктивное сопротивление обмотки велико. Вследствие этого cos Ψ 2 имеет малое значение (около 0,1-0,2). Поэтому, несмотря на большую величину пускового тока, пусковой вращающий момент будет наибольшим. По мере разгона двигателя скольжение уменьшается.
При некотором скольжении S 1 , называемом критическим, вращающий момент двигателя будет иметь максимальное значение. При дальнейшем уменьшении скольжения (или, иначе говоря, при дальнейшем увеличении скорости вращения двигателя) вращающий момент будет быстро уменьшаться и при скольжении S = 0 момент двигателя будет равен нулю. Этот режим соответствует идеальному холостому ходу, когда двигатель не нагружен, а механическими потерями (на трение) можно пренебречь.
Пусковой момент можно увеличить, если в момент пуска уменьшить сдвиг фаз между током и э.д.с. ротора. Если увеличить активное сопротивление цепи ротора, то угол Ψ 2 уменьшится, что приведет к тому, что cos Ψ 2 и вращающий момент двигателя станут больше.
Этим пользуются на практике для увеличения пускового вращающего момента двигателя. В момент пуска в цепь ротора вводят активное сопротивление (пусковой реостат), которое затем выводят по мере разгона двигателя.
Увеличение пускового момента приводит к тому, что максимальный вращающий момент двигателя получается при большем скольжении (точка S 2 кривой В на рис. 256). Путем увеличения активного сопротивления цепи ротора при пуске можно добиться того, что максимальный вращающий момент будет в момент пуска (S = 1 кривой С).
Вращающий момент, развиваемый асинхронным двигателем, как указывалось, зависит от величины магнитного потека Φ. При снижении приложенного напряжения U 1 уменьшается магнитный поток Φ, а следовательно, и вращающий момент, развиваемый двигателем при данной скорости вращения.
Теория и практика показывают, что вращающий момент асинхронного двигателя пропорционален квадрату напряжения, поэтому даже небольшое уменьшение напряжения сети сопровождается резким уменьшением момента.
Кривая А называется естественной механической характеристикой, а кривые В и С - реостатными механическими характеристиками асинхронного двигателя.
Работе двигателя с номинальной нагрузкой соответствует точка N на кривой A.
При скольжении S н двигатель развивает номинальный момент M н.
Ранее было указано, что путем увеличения активного сопротивления цепи роторной обмотки можно увеличить вращающий момент двигателя. Можно было бы сделать роторную обмотку большего сопротивления, но это вызвало бы значительный нагрев обмотки и уменьшение к.п.д. двигателя. Для улучшения пусковых характеристик асинхронных двигателей с короткозамкнутым ротором применяют двигатели с двумя короткозамкнутыми обмотками на роторе и двигатели с глубоким пазом.
Двигатель с двумя клетками (короткозамкнутыми обмотками) был предложен Доливо-Добровольским. На роторе такого двигателя помещают две клетки (рис. 257): одну - пусковую, имеющую большое активное сопротивление и малое индуктивное сопротивление, и другую - рабочую, обладающую наоборот, малым активным сопротивлением и большим индуктивным сопротивлением.

Стержни пусковой клетки изготовляют обычно из латуни. Материалом рабочей клетки служит медь. Сечение рабочей клетки делается больше сечения пусковой клетки. В результате подбора материала и сечения клеток активное сопротивление пусковой клетки получается в четыре - пять раз больше сопротивления рабочей клетки.
Как видно на рис. 257, б, между стержнями пусковой и рабочей обмоток имеется узкая щель, размеры которой определяют индуктивность нижней рабочей клетки. Рассмотрим работу двуклеточного двигателя.
Индуктивность рабочей клетки больше, так как она сцеплена с большим числом магнитных линий.
В момент пуска двигателя, когда частота токов ротора равна частоте сети, индуктивное сопротивление этой клетки особенно велико. Благодаря этому сдвиг фаз между током рабочей клетки и э.д.с., индуктированной в ней, будет большим, а момент вращения, создаваемый клеткой, - малым. Ввиду большого активного сопротивления и малой индуктивности верхней пусковой клетки ток и э.д.с., индуктированные в ней, будут незначительно сдвинуты по фазе, и вращающий момент, развиваемый пусковой клеткой, будет большим. Следовательно, при пуске вращающий момент двигателя получается преимущественно за счет пусковой клетки.
С увеличением скорости двигателя частота токов ротора уменьшается, индуктивное сопротивление клеток оказывает на работу двигателя все меньшее влияние и поэтому распределение токов в клетках определяется только их активным сопротивлением. Но, как было указано выше, активное сопротивление рабочей клетки в несколько раз меньше сопротивления пусковой клетки. Поэтому при нормальной работе двигателя большая часть тока проходит по рабочей клетке и вращающий момент получается преимущественно за счет рабочей клетки.
На рис. 258 показана зависимость вращающего момента двигателя с двуклеточным ротором от величины скольжения. На диаграмме кривая 1 показывает изменение момента, создаваемого пусковой обмоткой, кривая 2 - изменение момента, создаваемого рабочей обмоткой. Сумма мгновенных значений моментов двух обмоток дает кривую М момента двуклеточного двигателя.

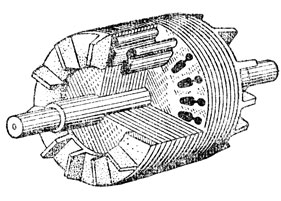
Более простым в изготовлении является ротор, у которого обе клетки заливают алюминием. На рис. 259 показаны внешний вид и частичный разрез ротора с двойной литой алюминиевой клеткой.
Двуклеточный двигатель дороже асинхронного двигателя с короткозамкнутым ротором обычной конструкции на 20-30%. Наши заводы изготовляют двуклеточные двигатели от 5 до 2000 квт.
Наряду с двуклеточным двигателем применяются двигатели с глубоким пазом (рис. 260). Отношение длины паза к ширине берется в пределах 10-12. Нижняя часть паза сцеплена с большим числом магнитных линий, чем верхняя часть паза. Вследствие этого индуктивное сопротивление нижней части паза больше, чем верхней, в особенности в момент пуска. Это приводит к вытеснению тока ротора в верхнюю часть стержней обмотки. Плотность тока в верхних слоях стержня увеличивается, что равносильно уменьшению сечения стержней и увеличению активного сопротивления обмотки. Это, как известно, приводит к увеличению вращающего момента двигателя. Кроме того, увеличение индуктивного и активного сопротивления обмотки ротора вызывает уменьшение пускового тока. С увеличением скорости двигатель приобретает свойства, соответствующие его обычной конструкции.

В табл. 11 приведены пусковые характеристики двигателя с короткозамкнутым ротором нормального исполнения, двуклеточного двигателя и двигателя с глубоким пазом. Пусковые свойства даются в виде отношения пускового тока I п к номинальному току I н и в виде отношения пускового момента М n к номинальному моменту М н.
