Министерство образования и науки Российской Федерации
Федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования
«Южно-Уральский государственный университет»
Факультет «Автотракторный»
Кафедра «Эксплуатация автомобильного транспорта»
Асинхронный двигательРЕФЕРАТпо дисциплине «Общая электротехника и электроника»
Проверил________ /Крымский В.В/_______________20____г.Автор работыстудент группы АТ-262__________/Иванов В.Д./_______________20____г.Реферат защищёнс оценкой (прописью, цифрой)_______________/ /_______________20____г.
Введение. 4
Асинхронные электродвигатели. 5
Короткозамкнутый ротор. Ротор асинхронной машины типа "беличья клетка. 6
Короткозамкнутая обмотка ротора, часто называемая "беличья клетка" из-за внешней схожести конструкции, состоит из медных или алюминиевых стержней, замкнутых накоротко с торцов двумя кольцами. Стержни этой обмотки вставляют в пазы сердечника ротора. В машинах малой и средней мощности ротор обычно изготавливают путём заливки расплавленного алюминиевого сплава в пазы сердечника ротора. Вместе со стержнями "беличьей клетки" отливают короткозамыкающие кольца и торцевые лопасти, осуществляющие самовентиляцию самого ротора и вентиляцию машины в целом. В машинах большой мощности "беличью клетку" выполняют из медных стержней, концы которых вваривают в короткозамыкающие кольца. 6
Способы управления асинхронным двигателем. 6
Принцип работы асинхронных электродвигателей. 9
Фазный ротор. 10
Фазный ротор имеет трехфазную (в общем случае - многофазную) обмотку, обычно соединённую по схеме "звезда" и выведенную на контактные кольца, вращающиеся вместе с валом машины. С помощью металлографитовых щёток, скользящих по этим кольцам, в цепь обмотки ротора: 10
Пуск асинхронного двигателя с фазным ротором. 11
Способы управления асинхронным двигателем. 12
Реостатное регулирование. 12
Основные неисправности асинхронного двигателя с фазным ротором 14
Заключение 15
Список литературы 16
Введение.
Трехфазный асинхронный электрический двигатель отличается от однофазного асинхронного двигателя тем, что на однофазном двигателе, точнее на его статоре, помещена однофазная обмотка, и называется главной обмоткой или же рабочей обмоткой.
Ротор однофазного двигателя по построению такой же, как и трехфазный асинхронный двигатель. Однофазные асинхронные электрические двигатели находят большое использование небольшой мощности - до 2 кВт. Однофазные асинхронные электрические двигатели мощностью до 500 Вт используют в бытовых электрических устройствах. Начальный (пусковой) вращающий момент отсутствует у электрических однофазных асинхронных двигателей. Отчего при подключении главной обмотки двигателя в сеть с одной фазой его ротор не может совершать обороты.
Для обеспечения запуска однофазного двигателя, на статоре устанавливают ещё одну обмотку - пусковую. Относительно главной обмотки она расположена под углом 90° и соединена последовательно с конденсатором или катушкой индуктивности. На момент подключения в сеть пусковой и главной обмоток образовываемые ими магнитные потоки создают вращающееся магнитное поле. Благодаря чему в роторе появляется индукционный ток. Вследствие взаимодействия вращающегося магнитного поля, создаваемого токами в обмотках статора и магнитного поля, создаваемого индукционным током в роторе, ротор приходит во вращение.
На время вращения ротора, образуется скольжение, следовательно, пусковая обмотка в таком случае просто не нужна и её отключает инерционный (центробежный) выключатель или специальное реле. Трехфазный асинхронный двигатель можно использовать и в качестве однофазного. Но недостаток такого метода заключается в необходимости использования дорогостоящих конденсаторов большой емкости, поскольку на каждые 100 Вт мощности требуется конденсатор с емкостью приблизительно 10 мкФ.
Асинхронные электродвигатели.
В настоящее время, на долю асинхронных двигателей приходится не менее 80% всех электродвигателей, выпускаемых промышленностью. К ним относятся и трехфазные асинхронные двигатели.
Трехфазные асинхронные электродвигатели широко используются в устройствах автоматики и телемеханики, бытовых и медицинских приборах, устройствах звукозаписи и т.п.
Асинхронная машина - это электрическая машина переменного тока, частота вращения ротора которой не равна (в двигательном режиме меньше) частоте вращения магнитного поля, создаваемого током обмотки статора.
В ряде стран к асинхронным машинам причисляют также коллекторные машины. В России асинхронными машинами стали называть машины, которые являются индукционными.
Асинхронные машины сегодня составляют большую часть электрических машин. В основном они используются как электродвигатели и являются основными преобразователями электрической энергии в механическую.
Достоинства асинхронных электродвигателей:
Широкое распространение трехфазных асинхронных двигателей объясняется простотой их конструкции, надежностью в работе, хорошими эксплуатационными свойствами, невысокой стоимостью и простотой в обслуживании.
Недостатки:
1. Небольшой пусковой момент.
2. Значительный пусковой ток.
Асинхронная машина имеет статор и ротор, разделённые воздушным зазором. Её активными частями являются обмотки и магнитопровод; все остальные части - конструктивные, обеспечивающие необходимую прочность, жёсткость, охлаждение, возможность вращения и т.п.
Обмотка статора представляет собой трёхфазную (в общем случае - многофазную) обмотку, проводники которой равномерно распределены по окружности статора и пофазно уложены в пазах с угловым расстоянием 120 эл. град. Фазы обмотки статора соединяют по стандартным схемам "треугольник" или "звезда" и подключают к сети трёхфазного тока. Магнитопровод статора перемагничивается в процессе изменения (вращения) магнитного потока обмотки возбуждения, поэтому его изготавливают шихтованным (набранным из пластин) из электротехнической стали для обеспечения минимальных магнитных потерь.
По конструкции ротора асинхронные машины подразделяют на два основных типа: с короткозамкнутым ротором и с фазным ротором. Оба типа имеют одинаковую конструкцию статора и отличаются лишь исполнением обмотки ротора. Магнитопровод ротора выполняется аналогично магнитопроводу статора - из электротехнической стали и шихтованным.
Короткозамкнутый ротор. Ротор асинхронной машины типа "беличья клетка.
Короткозамкнутая обмотка ротора, часто называемая "беличья клетка" из-за внешней схожести конструкции, состоит из медных или алюминиевых стержней, замкнутых накоротко с торцов двумя кольцами. Стержни этой обмотки вставляют в пазы сердечника ротора. В машинах малой и средней мощности ротор обычно изготавливают путём заливки расплавленного алюминиевого сплава в пазы сердечника ротора. Вместе со стержнями "беличьей клетки" отливают короткозамыкающие кольца и торцевые лопасти, осуществляющие самовентиляцию самого ротора и вентиляцию машины в целом. В машинах большой мощности "беличью клетку" выполняют из медных стержней, концы которых вваривают в короткозамыкающие кольца.
Зачастую пазы ротора или статора делают скошенными для уменьшения высших гармонических ЭДС, вызванных пульсациями магнитного потока из-за наличия зубцов, магнитное сопротивление которых существенно ниже магнитного сопротивления обмотки, а также для снижения шума, вызываемого магнитными причинами. Для улучшения пусковых характеристик асинхронного электродвигателя с короткозамкнутым ротором, а именно, увеличения пускового момента и уменьшения пускового тока, на роторе применяют специальную форму паза. При этом внешняя от оси вращения часть паза ротора имеет меньшее сечение чем внутренняя. Это позволяет использовать эффект вытеснения тока, за счет которого увеличивается активное сопротивление обмотки ротора при больших скольжениях (при пуске).
Асинхронные двигатели с короткозамкнутым ротором имеют небольшой пусковой момент и значительный пусковой ток, что является существенным недостатком "беличьей клетки". Поэтому их применяют в тех электрических приводах, где не требуются большие пусковые моменты. Из достоинств следует отметить лёгкость в изготовлении, и отсутствие механического контакта со статической частью машины, что гарантирует долговечность и снижает затраты на обслуживание. При специальной конструкции ротора, когда магнитопровод "ротора" остается неподвижным, а вращается в магнитном зазоре только полый цилиндр из алюминия (беличья клетка или короткозамкнутая обмотка ротора) можно достичь малой инерционности двигателя.
Устройство асинхронных электродвигателей с фазным ротором.
Основными частями любого асинхронного двигателя является неподвижная часть - статор и вращающая часть, называемая ротором.
Статор трехфазного асинхронного двигателя состоит из шихтованного магнитопровода, запрессованного в литую станину. На внутренней поверхности магнитопровода имеются пазы для укладки проводников обмотки. Эти проводники являются сторонами многовитковых мягких катушек, образующих три фазы обмотки статора. Геометрические оси катушек сдвинуты в пространстве друг относительно друга на 120 градусов.
Фазы обмотки можно соединить по схеме ""звезда"" или "треугольник" в зависимости от напряжения сети. Например, если в паспорте двигателя указаны напряжения 220/380 В, то при напряжении сети 380 В фазы соединяют "звездой". Если же напряжение сети 220 В, то обмотки соединяют в "треугольник". В обоих случаях фазное напряжение двигателя равно 220 В.
Ротор трехфазного асинхронного двигателя представляет собой цилиндр, набранный из штампованных листов электротехнической стали и насаженный на вал. В зависимости от типа обмотки роторы трехфазных асинхронных двигателей делятся на короткозамкнутые и фазные.
Доливо-Добровольский первым создал двигатель с короткозамкнутым ротором и исследовал его свойства. Он выяснил, что у таких двигателей есть очень серьёзный недостаток - ограниченный пусковой момент. Доливо-Добровольский назвал причину этого недостатка - сильно закороченный ротор. Им же была предложена конструкция двигателя с фазным ротором.
На рис. приведен вид асинхронной машины с фазным ротором в разрезе: 1 - станина, 2 - обмотка статора, 3 - ротор, 4 - контактные кольца, 5 - щетки.
У фазного ротора обмотка выполняется трёхфазной, аналогично обмотке статора, с тем же числом пар полюсов. Витки обмотки закладываются в пазы сердечника ротора и соединяются по схеме звезда. Концы каждой фазы соединяются с контактными кольцами, закреплёнными на валу ротора, и через щётки выводятся во внешнюю цепь. Контактные кольца изготавливают из латуни или стали, они должны быть изолированы друг от друга и от вала. В качестве щёток используют металлографитовые щётки, которые прижимаются к контактным кольцам с помощью пружин щёткодержателей, закреплённых неподвижно в корпусе машины. На рис. приведено условное обозначение асинхронного двигателя с короткозамкнутым (а) и фазным (б) ротором.

В асинхронных электродвигателях большей мощности и специальных машинах малой мощности для улучшения пусковых и регулировочных свойств применяются фазные роторы. В этих случаях на роторе укладывается трехфазная обмотка с геометрическими осями фазных катушек (1), сдвинутыми в пространстве друг относительно друга на 120 градусов.
Фазы обмотки соединяются звездой и концы их присоединяются к трем контактным кольцам (3), насаженным на вал (2) и электрически изолированным как от вала, так и друг от друга. С помощью щеток (4), находящихся в скользящем контакте с кольцами (3), имеется возможность включать в цепи фазных обмоток регулировочные реостаты (5).
Асинхронный двигатель с фазным роторомимеет лучшие пусковые и регулировочные свойства, однако ему присущи большие масса, размеры и стоимость, чем асинхронному двигателю с короткозамкнутым ротором.
Принцип работы асинхронных электродвигателей.
Принцип работы асинхронной машины основан на использовании вращающегося магнитного поля. При подключении к сети трехфазной обмотки статора создается вращающееся магнитное поле, угловая скорость которого определяется частотой сети f и числом пар полюсов обмотки p, т.е. ω1=2πf/p
Пересекая проводники обмотки статора и ротора, это поле индуктирует в обмотках ЭДС (согласно закону электромагнитной индукции). При замкнутой обмотке ротора ее ЭДС наводит в цепи ротора ток. В результате взаимодействия тока с результирующим малнитным полем создается электромагнитный момент. Если этот момент превышает момент сопротивления на валу двигателя, вал начинает вращаться и приводить в движение рабочий механизм. Обычно угловая скорость ротора ω2 не равна угловой скорости магнитного поля ω1, называемой синхронной. Отсюда и название двигателя асинхронный, т.е. несинхронный.
Работа асинхронной машины характеризуется скольжением s, которое представляет собой относительную разность угловых скоростей поля ω1 и ротора ω2: s= (ω1-ω2) /ω1

Значение и знак скольжения, зависящие от угловой скорости ротора относительно магнитного поля, определяют режим работы асинхронной машины. Так, в режиме идеального холостого хода ротор и магнитное поле вращаются с одинаковой частотой в одном направлении, скольжение s=0, ротор неподвижен относительно вращающегося магнитного пол, ЭДС в его обмотке не индуктируется, ток ротора и электромагнитный момент машины равны нулю. При пуске ротор в первый момент времени неподвижен: ω2=0, s=1. В общем случае скольжение в двигательном режиме изменяется от s=1 при пуске до s=0 в режиме идеального холостого хода.
При вращении ротора со скоростью ω2>ω1 в направлении вращения магнитного поля скольжение становится отрицательным. Машина переходит в генераторный режим и развивает тормозной момент. При вращении ротора в направлении, противоположном направлению вращения магнитного поли (s>1), асинхронная машина переходит в режим противовключения и также развивает тормозной момент. Таким образом, в зависимости от скольжения различают двигательный (s=1÷0), генераторный (s=0÷-∞) режимы и режим противовключення (s=1÷+∞). Режимы генераторный и противовключения используют для торможения асинхронных двигателей.
Фазный ротор.
Фазный ротор имеет трехфазную (в общем случае - многофазную) обмотку, обычно соединённую по схеме "звезда" и выведенную на контактные кольца, вращающиеся вместе с валом машины. С помощью металлографитовых щёток, скользящих по этим кольцам, в цепь обмотки ротора:
включают пускорегулирующий реостат, выполняющий роль добавочного активного сопротивления, одинакового для каждой фазы. Снижая пусковой ток, добиваются увеличения пускового момента до максимального значения (в первый момент времени). Такие двигатели применяются для привода механизмов, которые пускают в ход при большой нагрузке или требующих плавного регулирования скорости.
включают индуктивности (дроссели) в каждую фазу ротора. Сопротивление дросселей зависит от частоты протекающего тока, а, как известно, в роторе в первый момент пуска частота токов скольжения наибольшая. По мере раскрутки ротора частота индуцированных токов снижается, и вместе с нею снижается сопротивление дросселя. Индуктивное сопротивление в цепи фазного ротора позволяет автоматизировать процедуру запуска двигателя, а при необходимости - "подхватить" двигатель, у которого упали обороты из-за перегрузки. Индуктивность держит токи ротора на постоянном уровне.
включают источник постоянного тока, получая таким образом синхронную машину.
включают питание от инвертора, что позволяет управлять оборотами и моментными характеристиками двигателя. Это особый режим работы (машина двойного питания). Возможно включение напряжения сети без инвертора, с фазировкой, противоположной той, которой запитан статор.
Пуск асинхронного двигателя с фазным ротором.
Пусковые условия асинхронного двигателя с фазной обмоткой ротора можно существенно улучшить ценой некоторого усложнения конструкции и обслуживания двигателя.
Т.к. активное сопротивление фазной обмотки ротора относительно мало, то для получения максимального начального пускового момента необходимо в цепь ротора включить пусковой реостат с сопротивлением фазы
Как только ротор начинает вращаться, уменьшается скольжение, а в месте с ним ЭДС и ток ротора, вследствие чего уменьшается вращающий момент. Чтобы двигатель продолжал развивать вращающий момент, близкий к максимальному, сопротивление пускового реостата нужно постепенно уменьшать. Наконец когда двигатель достигает номинальной частоты вращения, пусковой реостат замыкают накоротко.
Для уменьшения механических потерь и износа колец и щеток двигатели снабжаются иногда приспособлением для подъема щеток и замыкания колец накоротко.
Чем больше должен быть пусковой момент, чем ближе он к максимальному моменту, тем больше будет и пусковой ток. По этой причине лишь для особо тяжелых условий пуска реостат подбирается так, чтобы пусковой момент был равен максимальному.
Чтобы пусковой реостат в течение времени пуска не перегревался, его мощность должна примерно равняться мощности двигателя. Для двигателей большой мощности пусковые реостаты изготавливаются с масляным охлаждением.
Конечно, применение пускового реостата значительно улучшает пусковые условия асинхронного двигателя, повышая пусковой момент и уменьшая пусковой ток.
Способы управления асинхронным двигателем.
Под управлением асинхронным двигателем переменного тока понимается изменение частоты вращения ротора и/или его момента. Существуют следующие способы управления асинхронным двигателем:
реостатный - изменение частоты вращения АД с фазным ротором путём изменения сопротивления реостата в цепи ротора, кроме того это увеличивает пусковой момент;
частотный - изменение частоты вращения АД путём изменения частоты тока в питающей сети, что влечёт за собой изменение частоты вращения поля статора. Применяется включение двигателя через частотный преобразователь
переключением обмоток со схемы "звезда" на схему "треугольник" в процессе пуска двигателя, что даёт снижение пусковых токов в обмотках примерно в три раза, но в то же время снижается и момент;
импульсный - подачей напряжения питания специального вида (например, пилообразного);
введение добавочной э. д. с с согласно или противонаправлено с частотой скольжения во вторичную цепь.
изменением числа пар полюсов, если такое переключение предусмотрено конструктивно (только для к. з. роторов);
изменением амплитуды питающего напряжения, когда изменяется только амплитуда (или действующее значение) управляющего напряжения. Тогда векторы напряжений управления и возбуждения остаются перпендикулярны (автотрансформаторный пуск);
фазовое управление характерно тем, что изменение частоты вращения ротора достигается путём изменения сдвига фаз между векторами напряжений возбуждения и управления;
амплитудно-фазовый способ включает в себя два описаных способа;
включение в цепь питания статора реакторов;
индуктивное сопротивление для двигателя с фазным ротором.
Реостатное регулирование.
В трехфазных асинхронных двигателях с фазным ротором применяется реостатный способ регулирования частоты вращения ротора. Это достигается введением в цепь фазных обмоток ротора регулируемого трехфазного реостата, как при пуске двигателя. Но этот реостат должен быть рассчитан на длительную нагрузку током ротора, а не на кратковременную, как пусковой реостат. Увеличение активного сопротивления цепи ротора изменяет характеристику М вр (s) - делает ее более мягкой. Если при постоянном моменте на валу двигателя увеличивать активное сопротивление цепи ротора путем постепенного увеличения сопротивления реостата (r p 1 < r p 2 < r p 3 ), то рабочая точка будет с одной кривой М вр (s) на следующую, соответствующую возросшему сопротивлению цепи ротора, соответственно чему растет скольжение, а, следовательно, уменьшается частота вращения двигателя. Этим путем можно изменять частоту вращения ротора в пределах от номинальной до полной остановки. Недостатком такого способа регулирования являются относительно большие потери энергии.
Основные неисправности асинхронного двигателя с фазным ротором
|
Неисправность |
Возможная причина |
|
Не развивает номинальную скорость вращения и гудит |
Одностороннее притяжение ротора вследствие: а) износа подшипников; б) перекоса подшипниковых щитов; в) изгиба вала |
|
Плохо развивает скорость и гудит, ток во всех трех фазах различен и даже на холостом ходу превышает номинальный |
1. Неправильно соединены обмотки и одна из фаз оказалась "перевернутой" 2. Оборван стержень обмотки ротора |
|
Ротор не вращается или вращается медленно, двигатель гудит |
Оборвана фаза обмотки статора |
|
Вибрирует вся машина |
1. Нарушено центрирование соединительных полумуфт или соосность валов 2. Неуравновешены ротор, шкив и полумуфты |
|
Вибрация исчезает после отключения от сети, ток в фазах статора становится неодинаков, один из участков обмотки статора быстро нагревается |
Короткое замыкание в обмотке статора |
|
Перегревается при номинальных перегрузках |
1. Витковое замыкание в обмотке статора 2. Загрязнение обмоток или вентиляционных каналов |
|
Низкое сопротивление |
1. Увлажнение или загрязнение обмоток 2. Старение изоляции |
Заключение
Асинхронные электрические двигатели трехфазного типа с короткозамкнутым ротором широко используют в народном хозяйстве, однако такие двигатели обладают рядом недостатков: отсутствует плавное регулирование частоты вращения, большой пусковой ток и др. Но все это можно обойти, если же вместо ротора воспользоваться фазным ротором.
Подобающим образом устроен фазный ротор: трехфазная обмотка размещена в пазах ротора, (обмотка подобная обмотке статора); звездой соединены фазы обмотки ротора; начала фаз соединены с изготовленными из латуни или меди тремя контактными кольцами, которые в свою очередь укреплены на одном валу с ротором. Соответственно контактные кольца изолированы друг от друга и от вала. К контактным кольцам хорошо прижаты металло-графитные или угольные щётки, установленные на щёткодержателе, укрепленном на подшипниковом щите.
Для запуска двигателя с фазным ротором щётки соединяют с регулировочными или пусковыми реостатами. Эти самые реостаты дают возможность понизить пусковой ток, так как из-за них усиливается всеобщее сопротивление обмотки ротора.
Реостаты применяют для плавного регулирования частоты вращения двигателя, а также в изменении других рабочих характеристик.
Список литературы
1. Проектирование электрических машин: Учебник для вузов Книга 1. Под редакцией Копылова И.П. Москва: Энергоатомиздат 1993. - 464 с.
2. Электрические машины: Асинхронные машины: Учеб. Для электромех. спец. Вузов / Радин В.И., Брускин Д.Э., Зорохович А. Е.; Под ред. И.П. Копылов-М.: Высшая школа, 1988,-328 с.
Кузнецов М.И. Основы электротехники. Учебное пособие. Изд. 10-е, перераб. "Высшая школа"
Асинхронный двигатель с короткозамкнутым ротором (АД С КЗР)
Устройства, преобразующие электрическую энергию (вход) в механическую (выход), называются электрическими двигателями .
Механическая энергия необходима для работы производственных машин и механизмов.
АД состоит из статора (неподвижной части) и ротора (подвижной части).
В статор входят: корпус; магнитопровод (сердечник), состоящий из тонких стальных пластин; три обмотки (катушки), смещенные между собой на 120°, которые укладываются в пазы магнитопровода.
В ротор входят: вал, магнитопровод, короткозамкнутая (в виде беличьей клетки) обмотка.
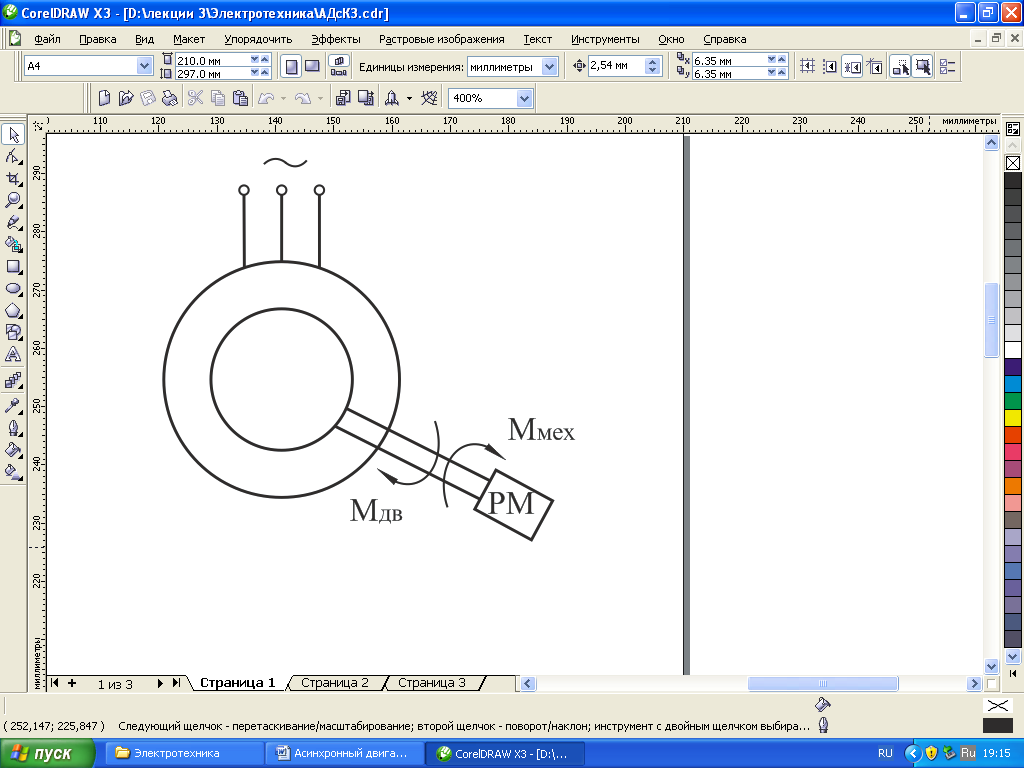
Условное обозначение
К ротору подсоединяется производственный механизм, который является нагрузкой на двигатель.
Достоинства двигателя: простой, дешевый, надежный.
Недостатки: плохие пусковые качества, т. е. малый пусковой момент, большой пусковой ток, а также потребление из сети реактивного тока.
ПРИНЦИП РАБОТЫ
U 1 → I 1 → Ф 1 (вращающееся магнитное поле) → Е 2 (Е 1 ) → I 2
В результате взаимодействия I 2 с Ф, создается момент М [Нм]
М = К I 2 Ф cosψ 2 ,
где ψ 2 - фазовый сдвиг между Е 2 иI 2 , под действием которого ротор приходит во вращение.
В АД имеет место АСИНХРОННОСТЬ (неодинаковость) вращения магнитного поля n 1 и ротора n 2 . Благодаря этой асинхронности движения возникают электрические процессы в роторе (Е 2 иI 2). Величина асинхронности оценивается скольжением S, в относительных единицах или процентах:
![]() ,
[%],
,
[%],
n 1 - частота вращения магнитного поля.
P п - число пар магнитных полюсов поля: 1, 2, 3 … и т. д.;
f - частота тока.
Если f ном = 50 Гц, то = 3000, 1500,1000 об/мин и т. д. в зависимости от числа пар полюсов двигателя.
Из
(1) имеем
![]() .
.
Работа двигателя начинается с n 2 = 0 (пуск), тогда
(максимальное скольжение).
Теоретически максимальная частота вращения ротора при отсутствии нагрузки n 2 = n 1 , тогда
Диапазон изменений S составил от 1 (минимальная скорость ротора) до 0 (максимальная скорость ротора).
МЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКА АД - основная характеристика АД, показывающая как изменяется частота вращения ротора под действием нагрузки. Эту характеристику можно получить эксплуатационным или расчетным путем по формулам:
 (1)
(1)
Задаваясь в формулах (1) и (2) S , можно найти n.
Задаваясь нагрузкой М можно найти скольжение, а, следовательно, и n 2 .
Эта механическая характеристика имеет вид:
|
|
|

На характеристике можно выделить 4 основных точки и соответственно 3 участка. Рассмотрим эти точки:
1 - холостой ход (двигатель вращается без нагрузки).
Координаты этой точки (n 2 = n 1 , М=0);
2 - номинальный режим - наступает при нагрузке равной предельно допустимой в условиях длительной работы.
Координаты этой точки (n 2 = n ном, М=М ном), указываются в паспорте;
3 - критическая нагрузка, при которой двигатель развивает максимальный момент.
Координаты этой точки (S кр или n кр; М=М мах =М кр) .
При нагрузке большей критической двигатель с ней не справляется, что приводит к остановке;
4 - пусковая точка, с этой точки начинается запуск двигателя.
Координаты этой точки (n 2 = 0, М = М п)
Все координаты можно найти по паспортным данным двигателя.
Участки 1-3 - устойчивая работа, при нагрузке двигателя от 0 до М кр двигатель обладает способностью подстраиваться под нагрузку и увеличивать свой момент (усилие), что не приводит к остановке двигателя.
3-4 - характеризует разбег двигателя, работа на этом участке неустойчива.
При этом:
1-2 - возможна длительная работа, при которой ток, потребляемый из сети, не превышает предельно допустимого, т. е. номинального.
2-3 - допустима только кратковременная работа, т. к. при таких нагрузках I двигателя > I ном и возможен перегрев двигателя.
МЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКА n=f(M), полученная при номинальных условиях работы, т. е. при U=U ном, f=f ном и естественной схеме включения (без дополнительных элементов) называется ЕСТЕСТВЕННОЙ .
РЕГУЛИРОВАНИЕ СКОРОСТИ АД С КЗР
Как следует из формулы
![]()
на частоту вращения можно влиять, изменяя частоту вращения магнитного поля
Путем изменения частоты питающего напряжения f 1 (с помощью специальных преобразователей) или изменением числа пар полюсов P п (изменяя схему катушек статора).
В обоих случаях величина скольжения практически остается неизменной.
Также частоту вращения двигателя можно изменить, воздействуя на скольжение S. Это можно сделать, изменяя величину напряжения, питающего двигатель, или изменяя сопротивление ротора (если это позволяет конструкция ротора).
МЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКА , полученная при условиях работы, отличающихся от номинальных, называется ИСКУССТВЕННОЙ .
Рассмотрим эти способы.
ВЛИЯНИЕ ЧАСТОТЫ f НА СКОРОСТЬ ДВИГАТЕЛЯ
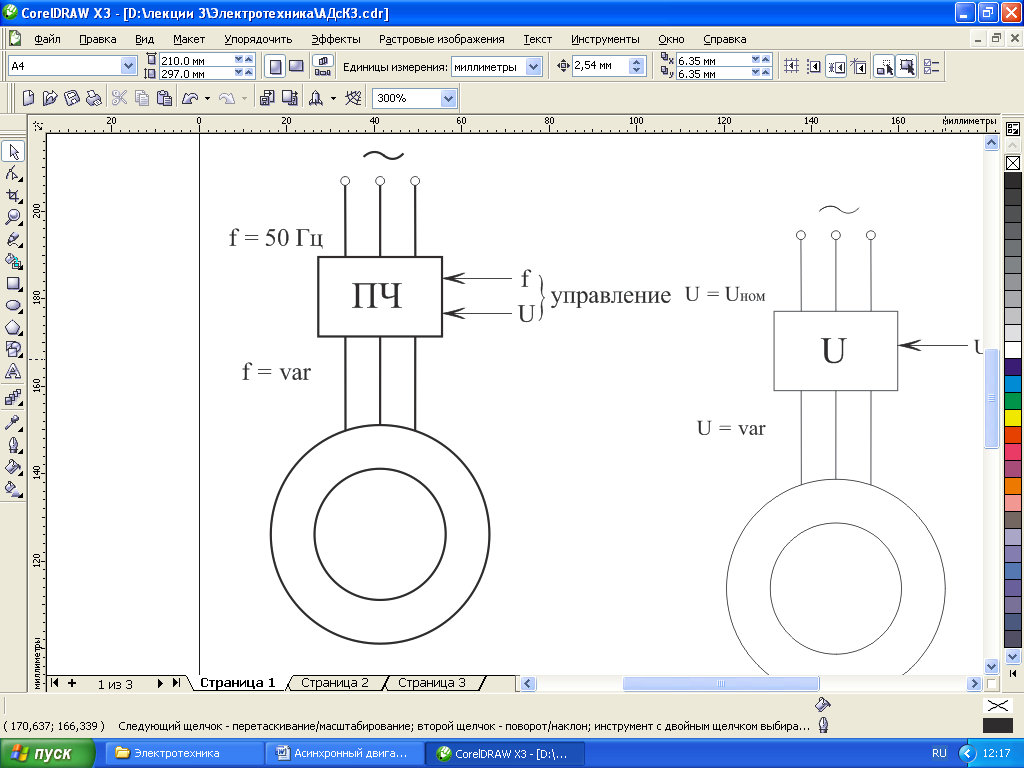
Из теории машин известно, что для обеспечения эффективной работы двигателя при частотном регулировании необходимо с изменением f изменять и подводимое напряжение настолько, чтобы отношение U/f оставалось величиной постоянной. Очевидно, что это условие можно выполнить только при уменьшении f<50 Гц, потому что уменьшение напряжения U
При увеличении f>50 Гц следовало бы пропорционально увеличить и напряжение U>U ном, однако, это не допустимо по условия эксплуатации двигателя. Это обстоятельство отразится на форме механической характеристики.
Отметим, что в любом случае при изменении f изменится и частота вращения магнитного поля (т. е. положение точки n 1 на механической характеристике). Таким образом, положение точки n 1 может быть ориентиром в изображении искусственных механических характеристик.

Если привести механическую характеристику механическую характеристику механизма (пусть М с =const, где М с - момент сопротивления), то можно оценить диапазон регулирования скорости при частотном регулировании, где А, А", А" - рабочие точки, полученные при условии М дв =М с.
Достоинства частотного способа регулирования скорости АД : плавность регулирования: плавно изменяя f, получаем большое количество искусственных характеристик, а, следовательно, и скоростей; большой диапазон с регулировкой как вверх так и вниз от номинальной (двухзонное регулирование).
Недостатки : необходимость установки частотного преобразователя, что значительно увеличивает стоимость электропривода.
ПОЛЮСНОЕ
РЕГУЛИРОВАНИЕ
предусматривает
возможность изменения числа пар полюсов
P п.
Такой способ возможен только у
специальных - многоскоростных,
асинхронных двигателей и достигается
за счет переключения отдельных секций,
из которых состоит катушка (обмотка)
статора с последовательного соединения
на параллельное или наоборот, причем
число пар полюсов при последовательном
соединении больше в 2 раза, чем при
параллельном, т. е. P п
посл. =2P п
парал. ,
а, следовательно,
![]() .
.
Очевидно, что положение точки n 1 на механической характеристике изменится в 2 раза.
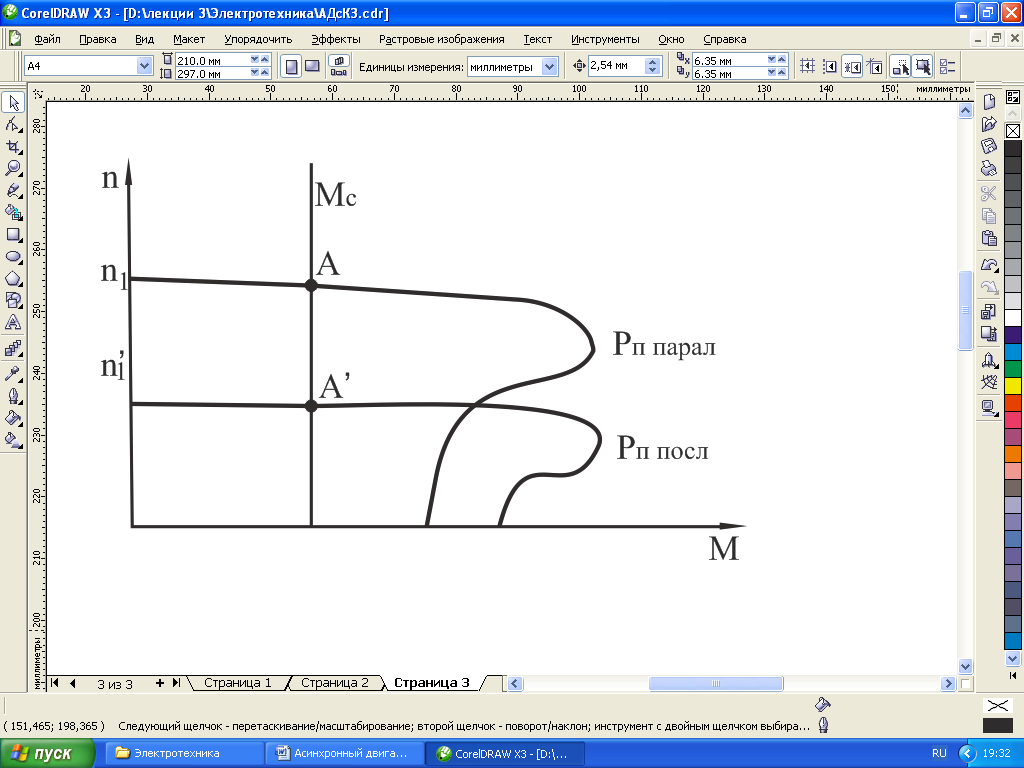
Достоинства полюсного регулирования : простота реализации, отсутствие специальных преобразующих устройств в цепи питания двигателя.
Недостатки : ступенчатость при регулировании, небольшой диапазон регулирования.
РЕГУЛИРОВАНИЕ СКОРОСТИ ИЗМЕНЕНИЕМ ВЕЛИЧИНЫ ПИТАЮЩЕГО НАПРЯЖЕНИЯ U
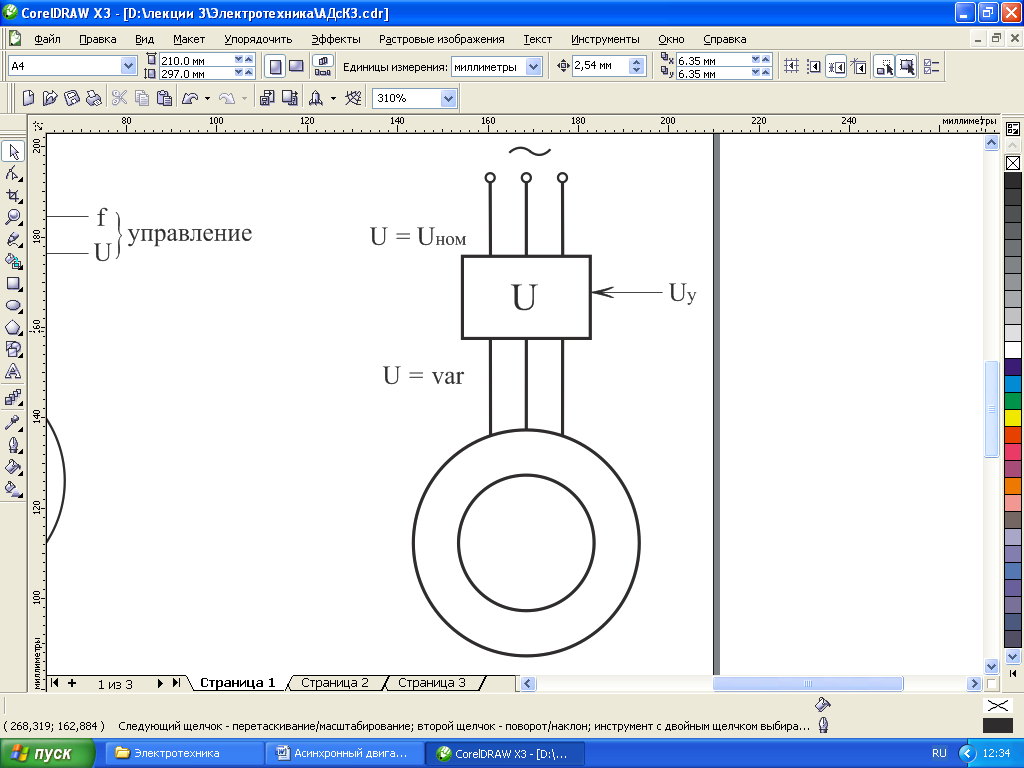
При этом способе частота вращения магнитного поля () остается постоянной, а частота вращения ротора изменяется за счет скольжения. Это можно объяснить тем, что с уменьшением питающего напряжения сильно (квадратичная зависимость) снижается М двигателя, что при прежней нагрузке приводит к снижению скорости, а, следовательно, и скольжения. При построении искусственных механических характеристик исходим из того, что точка n 1 , соответствующая частоте вращения магнитного поля, не изменится, напряжение U можно изменять только в сторону уменьшения, а, следовательно, моменты М п и М мах уменьшатся, т. к. М~U 2 .
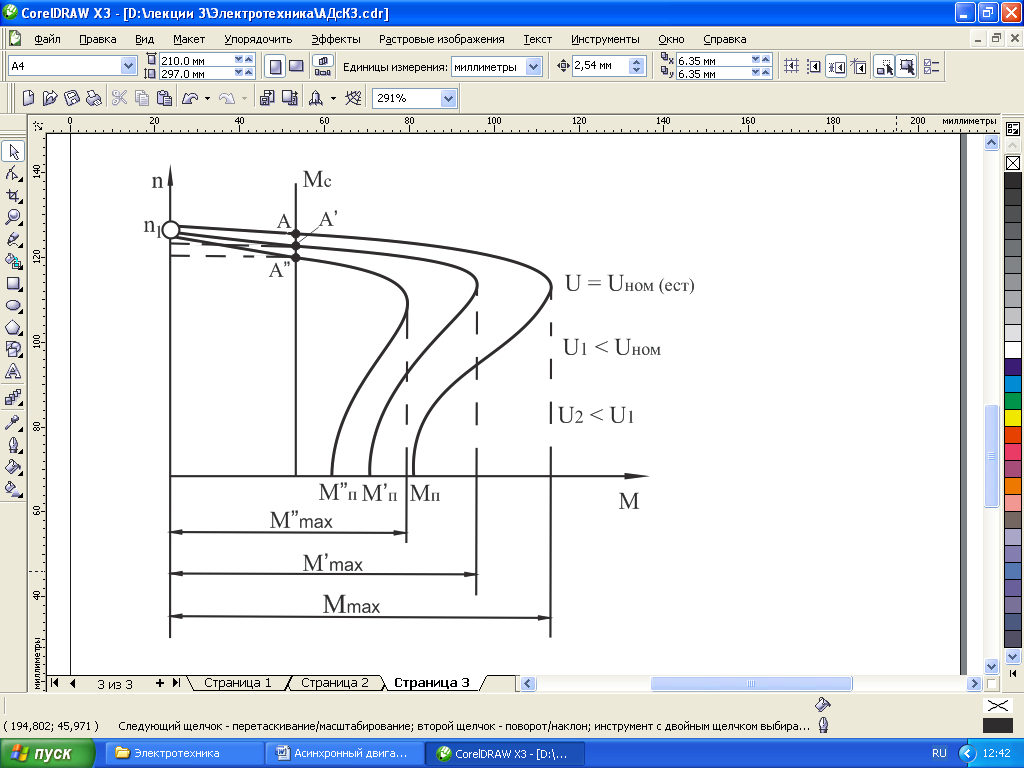
Недостаток : малый диапазон регулирования скорости (оценки скорости при работе в точках А, А", А"). Поэтому данный способ регулирования применяется редко.
Лекции по электрическим машинам
Асинхронный двигатель с короткозамкнутым ротором (рис. 249 и 250) состоит из следующих основных частей: статор с трехфазной обмоткой, ротор с короткозамкнутой обмоткой и остов. Обмотка ротора выполнена бесконтактной (она не соединена ни с какой внешней цепью), что определяет высокую надежность такого двигателя.
Магнитная система. Асинхронная машина в отличие от машины постоянного тока не имеет явно выраженных полюсов. Такую магнитную систему называют неявнополюсной. Число полюсов в машине определяется числом катушек в обмотке статора и схемой их соединения. В четырехполюсной машине (рис. 251) магнитная система состоит из четырех одинаковых ветвей, по каждой из которых проходит половина магнитного потока Ф п одного полюса, в двухполюсной машине таких ветвей две, в шестиполюсной - шесть и т. д. Так как через все элементы магнитной системы проходит переменный магнитный поток, то не только ротор 1, но
Рис. 249. Асинхронный двигатель с короткозамкнутым ротором: 1 - остов; 2 - статор; 3 - ротор; 4 - стержни обмотки ротора; 5 - подшипниковый щит; 6 - вентиляционные лопатки ротора; 7 - вентилятор; 8 - коробка выводов
 Рис. 250. Электрическая схема асинхронного двигателя с короткозамкнутым ротором (а) и его условное графическое изображение (б): 1 - статор; 2 - ротор
Рис. 250. Электрическая схема асинхронного двигателя с короткозамкнутым ротором (а) и его условное графическое изображение (б): 1 - статор; 2 - ротор
 Рис.251. Магнитное поле четырехполюсной асинхронной машины
Рис.251. Магнитное поле четырехполюсной асинхронной машины
 Рис. 252. Листы ротора (а) и статора (б)
Рис. 252. Листы ротора (а) и статора (б)
 Рис. 253. Пакет собранного статора (а) и статор с обмоткой (б)
Рис. 253. Пакет собранного статора (а) и статор с обмоткой (б)
и статор 2 выполняют из листов электротехнической стали (рис. 252), изолированных один от другого изоляционной лаковой пленкой, окалиной и пр. В результате этого уменьшается вредное действие вихревых токов, возникающих в стали статора и ротора при вращении магнитного поля. Листы статора и ротора имеют пазы открытой, полузакрытой или закрытой формы, в которых располагаются проводники соответствующих обмоток. В статоре чаще всего применяют полузакрытые пазы прямоугольной или овальной формы, в машинах большой мощности - открытые пазы прямоугольной формы.
Сердечник статора 1 (рис. 253, а) запрессовывают в литой остов 3 и укрепляют стопорными винтами. Сердечник ротора напрессовывают на вал ротора, который вращается в шариковых подшипниках, установленных в двух подшипниковых щитах. Воздушный зазор между статором и ротором имеет минимальный размер, допускаемый с точки зрения точности сборки и механической жесткости конструкции. В двигателях малой и средней мощности воздушный зазор обычно составляет несколько десятых миллиметра. Такой зазор обеспечивает уменьшение магнитного сопротивления магнитной цепи машины, а следовательно, и уменьшение намагничивающего тока, требуемого для создания в двигателе магнитного потока. Снижение намагничивающего тока позволяет повысить коэффициент мощности двигателя.
Обмотка статора . Она выполнена в виде ряда катушек из проволоки круглого или прямоугольного сечения. Проводники, находящиеся в пазах, соединяются, образуя ряд катушек 2 (рис. 253,б). Катушки разбивают на одинаковые группы по числу фаз, которые располагают симметрично вдоль окружности статора (рис. 254, а) или ротора. В каждой такой группе все катушки электрически соединяются, образуя одну фазу обмотки, т. е. отдельную электрическую цепь. При больших значениях фазного тока или при необходимости переключения отдельных катушек фазы могут иметь несколько параллельных ветвей. Простейшим элементом обмотки является виток (рис. 254,б), состоящий из двух проводников 1 и 2, размещенных в пазах, находящихся друг от друга на некотором расстоянии -
 Рис. 254. Расположение катушек трехфазной обмотки на статоре асинхронного двигателя (а) и виток из двух проводников (б)
Рис. 254. Расположение катушек трехфазной обмотки на статоре асинхронного двигателя (а) и виток из двух проводников (б)
у. Это расстояние приблизительно равно одному полюсному делению т, под которым понимают длину дуги, соответствующую одному полюсу.
Обычно витки, образованные проводниками, лежащими в одних и тех же пазах, объединяют в одну или две катушки. Иногда их называют секциями. Их укладывают таким образом, что в каждом пазу размещается одна сторона катушки или две стороны - одна над другой. В соответствии с этим различают одно- и двухслойные обмотки. Основным параметром, определяющим распределение обмотки по пазам, является число пазов q на полюс и фазу.
В обмотке статора двухполюсного двигателя (см. рис. 254, а) каждая фаза (А-Х; B-Y; C-Z) состоит из трех катушек, стороны которых расположены в трех смежных пазах, т. е. q = 3. Обычно q > 1, такая обмотка называется распределенной .
Наибольшее распространение получили двухслойные распределенные обмотки. Их секции 1 (рис. 255, а) укладывают в пазы 2 статора в два слоя. Проводники обмотки статора укрепляют в пазах текстолитовыми клиньями 5 (рис. 255,б), которые закладывают у головок зубцов.
Стенки паза покрывают листовым изоляционным материалом 4 (электрокартоном, лакотканью и пр.). Проводники, лежащие в пазах, соединяют друг с другом соответствующим образом с торцовых сторон машины. Соединяющие их провода называют лобовыми частями. Так как лобовые части не принимают участия в индуцировании э. д. с, их выполняют как можно короче.
Отдельные катушки обмотки статора могут соединяться «звездой» или «треугольником». Начала и концы обмоток каждой фазы выводят к шести зажимам двигателя.
Обмотка ротора. Обмотка ротора выполнена в виде беличьей клетки (рис. 256,а). Она сделана из медных или алюминиевых стержней, замкнутых накоротко с торцов двумя кольцами (рис. 256,б). Стержни этой обмотки вставляют в пазы ротора без какой-либо изоляции, так как напряжение в короткозамкнутой обмотке ротора равно нулю.
 Рис. 255. Двухслойная обмотка статора асинхронного двигателя: 1 - секция; 2 - паз; 3 - проводник; 4 - изоляционный материал; 5 - клин; 6 - зубец
Рис. 255. Двухслойная обмотка статора асинхронного двигателя: 1 - секция; 2 - паз; 3 - проводник; 4 - изоляционный материал; 5 - клин; 6 - зубец
 Рис. 256. Короткозамкнутый ротор: а - беличья клетка; б - ротор с беличьей клеткой из стержней; в - ротор с литой беличьей клеткой; 1 - короткозамыкающие кольца; 2- стержни; 3- вал; 4 - сердечник ротора; 5 - вентиляционные лопасти; 6 - стержни литой клетки
Рис. 256. Короткозамкнутый ротор: а - беличья клетка; б - ротор с беличьей клеткой из стержней; в - ротор с литой беличьей клеткой; 1 - короткозамыкающие кольца; 2- стержни; 3- вал; 4 - сердечник ротора; 5 - вентиляционные лопасти; 6 - стержни литой клетки
Пазы короткозамкнутого ротора обычно выполняют полузакрытыми, а в машинах малой мощности - закрытыми (паз имеет стальной ободок, отделяющий его от воздушного зазора). Такая форма паза позволяет хорошо укрепить проводники обмотки ротора, хотя и несколько увеличивает ее индуктивное сопротивление.
В двигателях мощностью до 100 кВт стержни беличьей клетки обычно получают путем заливки расплавленного алюминия в пазы сердечника ротора (рис. 256, в). Вместе со стержнями беличьей клетки отливают и соединяющие их торцовые короткозамыкающие кольца.
Для этой цели пригоден алюминий, так как он обладает малой плотностью, достаточно высокой электропроводностью и легко плавится.
Обычно двигатели имеют вентиляторы, насаженные на вал ротора. Они осуществляют принудительную вентиляцию нагретых частей машины (обмоток и стали статора и ротора), позволяя получить от двигателя большую мощность. В двигателях с короткозамкнутым ротором лопасти вентилятора часто отливают совместно с боковыми кольцами беличьей клетки (см. рис. 256, в).
Асинхронные двигатели с короткозамкнутым ротором просты по конструкции, надежны в эксплуатации. Их широко применяют для привода металлообрабатывающих станков и других устройств, которые начинают работать без нагрузки. Однако сравнительно малый пусковой момент у этих двигателей и большой пусковой ток не позволяют использовать их для привода таких машин и механизмов, которые должны пускаться в ход сразу под большой нагрузкой (с большим пусковым моментом). К таким машинам относятся грузоподъемные устройства, компрессоры и др.
Увеличить пусковой момент и уменьшить пусковой ток можно при выполнении беличьей клетки с повышенным активным сопротивлением. При этом двигатель будет иметь увеличенное скольжение и большие потери мощности в обмотке ротора. Такие двигатели называют двигателями с повышенным скольжением (обозначаются АС). Их можно использовать для привода машин, работающих сравнительно небольшое время. На э. п. с. переменного тока эти двигатели (со скольжением до 10%) применяют для привода компрессоров, которые работают периодически в течение коротких промежутков времени при уменьшении давления в воздушных резервуарах ниже определенного предела.
Двигатели с повышенным пусковым моментом. Короткозамкнутые асинхронные двигатели с повышенным пусковым моментом имеют специальную конструкцию ротора (обозначаются АП). К ним относятся двигатели с двойной беличьей клеткой и двигатели с глубокими пазами.
Ротор 3 (рис. 257,а) двигателя с двойной беличьей клеткой имеет две короткозамкнутые обмотки. Наружная клетка 1 является пусковой. Она обладает большим активным и малым реактивным сопротивлениями. Внутренняя клетка 2 является основной обмоткой ротора; она, наоборот, обладает незначительным активным и большим реактивным сопротивлениями. В начальный момент пуска ток проходит, главным образом, по наружной клетке, которая создает значительный вращающий момент. По мере увеличения частоты вращения ток переходит во внутреннюю клетку, и по окончании процесса пуска машина работает как обычный короткозамкнутый двигатель с одной (внутренней) клеткой. Вытеснение тока в наружную клетку в начальный момент пуска объясняется действием, э. д. с. самоиндукции, индуцируемой в проводниках ротора. Чем ниже расположен в пазу проводник, тем большим магнитным потоком рассеяния 6 он охватывается и тем большая э. д. с. самоиндукции в нем индуцируется (рис. 257, в), следовательно, тем большее он будет иметь индуктивное сопротивление.
Вытеснение тока в верхние проводники ротора сильно сказывается при неподвижном роторе, когда частота тока, индуцируемого в обеих клетках ротора, велика. При этом индуктивные сопротивления обеих клеток значительно больше активных и ток распределяется между ними обратно пропорционально их индуктивным сопротивлениям, т. е. проходит в основном по наружной клетке с большим активным сопротивлением.
По мере возрастания частоты вращения ротора частота тока в нем будет уменьшаться (вращающееся магнитное поле будут пересекать проводники ротора с меньшей частотой), и ток начнет проходить по обеим клеткам в соответствии с их активными сопротивлениями, т. е., главным образом, через внутреннюю клетку.
Таким образом, процесс пуска двигателя с двойной беличьей клеткой имеет сходство с процессом пуска асинхронного двигателя с фазным ротором, когда в начале пуска в цепь обмотки ротора вводится добавочное активное сопротивление (пусковой реостат), а по мере разгона это сопротивление выводится. Точно так же и в рассматриваемом двигателе ток в начале пуска проходит по наружной клетке с большим активным сопротивлением, а затем по мере разгона постепенно переходит во внутреннюю клетку с малым активным сопротивлением.
Рис. 257. Конструкция роторов асинхронных двигателей с повышенным пусковым моментом: с двойной беличьей клеткой (а), с глубокими пазами (б) и разрезы их пазов (в и г)
Для повышения активного сопротивления пусковой клетки стержни ее изготовляют из маргацовистой латуни или бронзы. Стержни рабочей клетки выполняют из меди, обладающей малым удельным сопротивлением, причем площадь поперечного сечения их больше, чем у пусковой клетки. В результате этого активное сопротивление пусковой клетки увеличивается в 4-5 раз по сравнению с рабочей. Между стержнями обеих клеток имеется узкая щель 5, размеры которой определяют индуктивность рабочей клетки. Двухклеточный двигатель на 20-30% дороже коротко-замкнутого двигателя обычной конструкции. Для упрощения технологии изготовления ротора двухклеточные двигатели небольшой и средней мощности выполняют с литой алюминиевой клеткой.
Действие двигателей с глубокими пазами (рис. 257, б) также основано на использовании явления вытеснения тока. В этих двигателях стержни 4 беличьей клетки выполнены в виде узких медных шин, заложенных в глубокие пазы ротора 3 (высота паза в 10- 12 раз больше его ширины). Нижние слои стержней, расположенные дальше от поверхности ротора, охватываются значительно большим числом магнитных линий потока рассеяния 6, чем верхние (рис. 257,г), поэтому они имеют во много раз большую индуктивность. В начале пуска в результате увеличенного индуктивного сопротивления нижних частей стержней ток проходит, главным образом, по их верхним частям. При этом используется только небольшая часть поперечного сечения каждого стержня, что приводит к увеличению его активного сопротивления, а следовательно, и к возрастанию активного сопротивления всей обмотки ротора.
При увеличении частоты вращения ротора вытеснение тока в верхние части стержней уменьшается (по той же причине, что и в двигателе с двойной беличьей клеткой), и после окончания пуска ток равномерно распределяется по площади их поперечного сечения.