3-3. מנועים חשמליים עם קצר חשמלי מפעילים מוט
מנוע חשמלי אסינכרוני עם סיבוב קצר על המוט הוא הכי הרבה סוג פשוטמנוע חשמלי חד פאזי מתנע מעצמו. המכשיר שלו מוצג באיור. 3-5. הסטטור בצורת פרסה מורכב מיריעות מוטבעות של 4 פלדה חשמלית.
היריעות מבודדות אחת מהשנייה עם סרט לכה כדי למנוע חימום חזק של הסטטור על ידי השטף המגנטי לסירוגין, הגורם להופעהזרמי מערבולת בליבת המנוע החשמלי. לסטטור יש רק סליל אחד 1, אבל הוא דו קוטבי. המרחק בין חלקי המוט שווה לרוחב הסליל, כך שניתן לגלגל אותו במכונה ישירות על ליבת הסטטור המבודדת. סיבובי הסליל מבודדים מהליבה באמצעות שרוול 3 ושני אוגנים 2 עשויים מקרטון חשמלי. על מנת להיות מסוגל לשים את האוגנים על הליבה, ישנם חריצים 14.
לחלקי המוט יש שני חורים שנטבעו בהם, שאליהם מוכנסים פניות סגורות. חוט נחושת 5, המכסה כשליש מקשת הקוטב. ברווחים שבין חלקי המוט, הרוטור מכוסה ב-shunts מגנטי, שהם לוחות פלדה 6 המוכנסים לחריצים של חלקי המוט.
הרוטור מורכב מיריעות P ובמרכזו חור עבור הציר 13. מוטות נחושת 8 מונעים בחריצים הממוקמים סביב היקף הרוטור, המולחמים לקצוות הרוטור. טבעות נחושת 7. בדרך כלל רוטורים של כלוב סנאימבוצע כאשר החריצים משופעים על ידי חלוקת שן אחת בקירוב.
הרוטור מסתובב בשני מיסבים, שהם תותבי פליז 10, הדחוסים בין לוחות 11. המשטח הכדורי של התותבים מאפשר להתקין אותם לאורך ציר הציר, ולכן מיסבים כאלה נקראים יישור עצמי. המסבים משומנים בשמן מכונות ומסופקים דרך חורים בתותבים ממכונת כביסה לבד 12 ספוגה בשמן. מיסבים אלו פשוטים יותר ממיסבים כדוריים ופועלים בשקט.
הזרם העובר דרך הסליל יוצר שטף מגנטי פועם, שחלקו חודר לסיבוב הקצר בקוטב. לפיכך, במנוע חשמלי עם סיבוב קצר, יש שני שטפים מגנטיים על הקוטב, המוזזים בזווית מסוימת. הם יוצרים שדה מגנטי מסתובב. בשל אי השוויון של שתי הזרימות, הווקטור של השדה המתקבל לא רק יסתובב, אלא גם ישתנה בגודלו במרווחי זמן שונים. לכן, סוף הווקטור לא יתאר מעגל, אלא אליפסה. עם זאת, זה מספיק כדי להזיז את הרוטור במהלך האתחול.
מומנט ההתנעה של מנוע חשמלי כזה קטן מאוד ומסתכם ב-20-40% מהמומנט הנקוב. לכן, מנועים חשמליים עם סיבוב קצר על המוט משמשים רק כאשר אין צורך במומנט התנעה גדול, למשל למאווררי שולחן, רשמקולים, נגנים חשמליים וכו'.
כדי להגביר את המומנט, מוחדרות לוחות פלדה דקים 6, הנקראים shunts מגנטיים, בין קצות המוט. כתוצאה מכך, השטף המגנטי המכוסה על ידי הסליל המקוצר גדל, והשדה המגנטי מתקרב בצורה מעגלית יותר.
כושר עומס היתר של המנוע החשמלי קטן מאוד, והמומנט המרבי מגיע בקושי לפי 1.2 מהמומנט הנקוב. אם העומס על הפיר חורג מרגע זה, הרוטור ייעצר. בניגוד לסוגים אחרים של מנועים חשמליים, במצב קצר חשמלי זרם הסטטור גדל מעט,
לכן המנוע החשמלי יכול במשך זמן רבלהיות מחובר לרשת עם רוטור נייח. מאפיין זה משמש במעגלים מסוימים. עקב הפסדי אנרגיה משמעותיים בסליל קצר, יעילות המנוע החשמלי אינה עולה על 40%.
מנועים עם סיבובים קצרים על המוט הם בלתי הפיכים. הרוטור מסתובב תמיד בכיוון הסיבוב הקצר, אשר מוצג על ידי החץ באיור. 3-5.
3-4. מנועים חשמליים עם פיתולים התחלתיים
הנפוצים ביותר הם מנועים חשמליים אסינכרוניים חד פאזיים עם פיתולי התחלה, שבהם הפיתולים אינם מרוכזים בצורה של סלילים, כמו
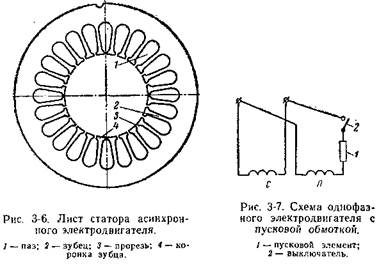
באיור. איור 3-6 מציג גיליון של סטטור מנוע חשמלי עם פיתול מתחיל. על ההיקף הפנימי, החריצים 1 מפוזרים באופן שווה, ביניהם יש שיניים 2; דרכם עובר השטף המגנטי מהסטטור לרוטור. חריצים 3 משמשים להכנסת מוליכים מתפתלים לתוך החריצים. החלק המורחב של שן 4 נקרא הכתר.
באיור. מוצגים 3-7 דיאגרמת מעגליםמנוע חשמלי חד פאזי עם פיתול מתחיל. למנועים חשמליים כאלה יש שתי פיתולים על הסטטור - סלילה עובדת C ופיתול התחלתי P. סלילה העבודה תופסת 2/3 מהחריצים, ופיתול ההתחלה תופס 1/3. לכן, המספר הכולל של חריצי הסטטור חייב להיות כפולה של שלוש. פיתול העבודה נשאר מחובר לרשת במשך כל הזמן שהמנוע החשמלי פועל, ופיתול ההתנעה מופעל רק כאשר הרוטור מאיץ בזמן ההפעלה, ולאחר מכן נכבה על ידי מתג 2 כאשר הרוטור מגיע 70-80% ממהירות הסיבוב הנומינלית. בתור מתג, נעשה שימוש בלחצנים עם כיבוי ידני או במתגים צנטריפוגליים אוטומטיים, הממוקמים על הרוטור ושוברים את המעגל כאשר הרוטור מגיע למהירות סיבוב מעל 70% מהמהירות הנקובת. מעגל מתפתל ההתחלה כולל אלמנט התחלה 1, המייצג לרוב התנגדות או קבל פעילים.
כאן אתה צריך להכיר את הרעיון של תארים חשמליים, אשר נמצא לעתים קרובות בפיתולים מכונות חשמליות. מגיאומטריה אנו יודעים שמעגל מחולק ל-360°. דרגות אלו נקראות גיאומטריות או מרחביות. מכיוון שהסטטור הוא מעגל, הוא תמיד מכיל 360 מעלות מרחביות. מספר המעלות החשמליות בהיקף הסטטור יכול להיות שווה ל-360 פעמים או יותר שלמים. אם יש שני קטבים על הסטטור, אז מספר המעלות החשמליות הוא גם 360. אבל אם יש ארבעה קטבים על הסטטור, אז עבור 360° חשמלי. עלינו לקחת את החלק של המעגל שעליו נמצאים קוטב צפוני אחד וקוטב דרומי אחד. מכיוון שהמעגל כולו תופס ארבע חלוקות קטבים, מספר המעלות החשמליות יהיה גדול פי שניים מהמרחביות. לפיכך, בפיתול ארבעה קוטבים היקף הסטטור מכיל 720° חשמלי, בפיתול שישה קוטבים 1,080° חשמלי. וכו '
מכאן נוכל להסיק חוק כללישמספר המעלות החשמליות במעגל שווה ל-360 p, כאשר p הוא מספר זוגות הקטבים של הפיתול.
לספק המאפיינים הטובים ביותרמנוע חשמלי, יש לעמוד בתנאים הבאים:
1) פיתולי העבודה וההתחלה חייבים להיות ממוקמים על היקף הסטטור בזווית של 90°;
2) יש להזיז את הווקטורים הנוכחיים בפיתולי העבודה וההתחלה ב-1/4 מהתקופה;
3) כוחות הממגנטים בשתי הפיתולים חייבים להיות שווים, כלומר. תוצרי הזרמים המתפתלים ומספר הסיבובים שלהם חייבים להיות שווים.
הווקטורים הנוכחיים של פיתולי העבודה וההתחלה יוצרים שדה מגנטי מסתובב. ניתן להציג זאת בתרשים הבא (איור 3-8). הבה נציג את הזרמים של פיתולי העבודה וההתחלה כשני סינוסואידים, המוזזים ב-1/4 פרקים. הסינוסואיד של הזרמים של הפיתול העובד מסומן באות C, ופיתול ההתחלה באות P. בזמנים שונים, וקטורי הזרם יהיו מתחת זוויות שונותולכן יהיה עליהם לקפל בצורה גיאומטרית.
אנו מחלקים את התקופה של גל הסינוס של מתפתל ההתחלה ל-12 חלקים ומציינים אותם במספרים על הציר האופקי.
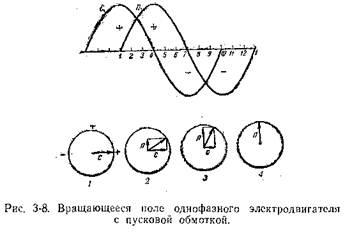
עבור כל נקודה על ציר הסינוסואיד, עליך לבנות עיגולים, לייעד אותם עם אותם מספרים כמו הנקודות על הציר הסינוסואידי. כל עיגול מתאים לערך נוכחי אחד בפיתולי העבודה וההתחלה. נשרטט את וקטורי השדה שנוצרו על ידי הזרמים של מתפתל העבודה לאורך הקוטר האופקי: ערכי שדה חיוביים נמצאים מימין למרכז המעגל, וערכים שליליים נמצאים משמאל. נתווה ערכים חיוביים של שדות ההתחלה המתפתלים כלפי מעלה לאורך הקוטר האנכי, ושליליים - כלפי מטה.
באיור. איור 3-8 מציג ארבעה עיגולים עבור נקודות סינוסואידיות 1, 2, 3 ו-4. האלכסונים של המלבנים הם הוקטורים של השדה המתקבל. נשאיר לקוראים לבנות את המעגלים ולהוסיף את הוקטורים לנקודות 5, 6 ו-7 וכו'. השוואת תרשימי העוגה מראה שהשדה המתקבל מסתובב בתדר סינכרוני. השדה המתקבל יגרום לזרמים בפיתול הרוטור, והוא יתחיל להסתובב.
הווקטורים הנוכחיים של פיתולי העבודה וההתחלה יוצרים שדה מגנטי מסתובב. אם כל שלושת התנאים המפורטים לעיל מתקיימים, אז הקצה של וקטור השדה המתקבל מתאר מעגל והשדה נקרא מעגלי. אבל אם לפחות אחד מה התנאים המפורטים, אז הווקטור של השדה המתקבל ישתנה בגודלו והשדה המגנטי לא יהיה מעגלי, אלא אליפטי. אבל אפילו עם שדה אליפטי, למנועים חשמליים יכולים להיות מאפייני הפעלה והתנעה מספקים.
3-5. מנועים חשמליים עם נגדי התנעה (נגדים) וקבלים
כאמור לעיל, חייבת להיות תזוזה בין הווקטורים הנוכחיים בפיתולי העבודה וההתחלה, אשר חייבת להיות שווה ל-1/4 מהתקופה כדי ליצור שדה מעגלי. ניתן להשיג שינוי בוקטורים הנוכחיים אם ההתנגדות האינדוקטיבית והאקטיבית של פיתולי העבודה וההתחלה שונים. ניתן לעשות זאת על ידי הכללת נגד או קבל פעילים במעגל המתפתל.
הנפוצים ביותר הם מנועים חשמליים חד פאזיים עם נגד התחלה, המוקף בפיתול ההתחלה עצמו. מנועים חשמליים כאלה נקראים מנועים חשמליים עם נגד מובנה. עבור מנועים חשמליים אלה, הפיתול הפועל תופס % מהחריצים ויש לו תגובת אינדוקטיבית גבוהה. פיתול ההתחלה תופס רק 1/3 מחריצי הסטטור, יש לו מספר קטן יותר של סיבובים, ולכן, תגובת אינדוקטיבית נמוכה משמעותית.
ההתנגדות הפעילה של הפיתול המתחיל חייבת להיות גדולה מההתנגדות הפעילה של הפיתול הפועל. לכן, זה פצע עם חוט של חתך קטן יותר. במנועים חשמליים הפועלים עם התחלות נדירות, החתך של חוט מתפתל ההתחלה מצטמצם עד כדי כך שצפיפות הזרם בו מגיעה ל-40 A/mm 2, ולפעמים יותר. התנגדות פעילה אינה יכולה ליצור תזוזה בין הווקטורים של פיתולי העבודה וההתחלה השווים ל-1/4 מהתקופה, כך שהשדה המתקבל לא יהיה מעגלי, אלא אליפטי. שדה אליפטי יכול להיחשב כסכום של שני שדות מעגליים לא שווים המסתובבים בכיוונים שונים. אחד מהם ישיר, יוצר מומנט, והשני הוא הפוך, יוצר מומנט בלימה. שדה הסיבוב ההפוך מחמיר את תכונות ההתנעה וההפעלה של המנוע החשמלי.
עבור מנועים חשמליים עם נגד התנעה מובנה, היחס בין מומנט ההתחלה למומנט הנקוב הוא 1 -1.2, והיחס זרם מתחילל 6.5-9 נומינלי. לכן, הם משמשים כאשר לא נדרשים מומנטים גדולים מאוד (מקררים, מכונות כביסה). מפעלי תעשיית החשמל מייצרים מנועים חשמליים עם נגד התנעה מובנה מסוג AOLB בטווח הספקים שבין 18 ל-600 W במתחים של 127, 220 ו-380 V, מהירויות סיבוב של 3,000 ו-1,500 סל"ד (סינכרוני).
עבור כוננים עם תנאי התנעה קשים, משתמשים במנועים חשמליים שבהם קבל משמש כאלמנט התנעה 1 (ראה איור 3-7). מנועים חשמליים אלו מסומנים באותיות AOLG ובעלי אותם נתונים נומינליים, מידות, משקל ופיתולי פעולה עם מנועים חשמליים מסוג AOLB. יש להם פיתולי התחלה שונים, ובהתאם לכך מאפייני התחלה שונים.
כידוע מהנדסת חשמל, הכללת קבל במעגל מובילה לכך שזרם המתפתל מתחיל לפני זרם המתפתל הפועל. באמצעות קבל, ניתן להזיז את הזרמים של פיתולי העבודה וההתנעה ב-90 o וכך ליצור שדה סיבוב מעגלי בעת ההפעלה. למנועים חשמליים עם קבלי התנעה יש תכונות התנעה טובות, כלומר יחס גדול בין מומנט התנעה למומנט נקוב (2-2.5), ויחס זרם התנעה נמוך (3-4) זרם מדורג). כדי ליצור גדול מומנט התחלהאפילו מנוע חשמלי קטן של 50 וולט ב-127 וולט דורש קבל של 40 µF. עם הגדלת המתח, הקיבול של הקבל יורד בחדות ובמתח מנוע של 220 V הוא 15 μF.
במנועים חשמליים עם פיתולים מתחילים, לאחר כיבוי הפיתולים הללו, 1/3 מחריצי הסטטור נותרים ללא שימוש. לכן, למנועים חשמליים כאלה יש כוח מופחת. כדי להגביר את הכוח, משתמשים במנועים חשמליים שבהם מתפתלת ההתחלה נשארת מופעלת. כדי ליצור תזוזה נוכחית בפיתולי C העבודה וההתחלה, קבל כלול במעגל של האחרון (איור 3-9). מנועים חשמליים כאלה נקראים מנועי קבלים, ופיתול ההתחלה המשמש במהלך פעולת המנוע החשמלי נקרא עזר או קבל ומסומן באות B. במנועים חשמליים קבלים, שתי הפיתולים תופסים את אותו מספר חריצים. באמצעות קבל, ניתן ליצור תזוזה של 90 מעלות בין הווקטורים הזרם בפיתולים.
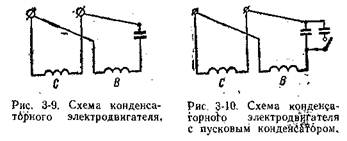
לפיכך, נוצר שדה מעגלי במנוע חשמלי קבלים בהספק נקוב. הודות לכך, מנועים חשמליים קבלים יש מאפיינים טובים: כוח פיר גבוה, יעילות גבוהה (60-75%) ומקדם כוח גבוה (cos φ=0.8÷0.95). עם זאת, מומנט ההתחלה של מנועים חשמליים כאלה נמוך. בדרך כלל הוא אינו עולה על 30% מהערך הנומינלי. זה מוסבר על ידי העובדה כי בעת התנעה, השדה המגנטי של המנוע החשמלי יהיה אליפטי. כדי לשפר את תכונות ההתחלה של המנוע החשמלי ברגע ההתנעה, קבל התחלה מחובר במקביל לקבל העבודה (איור 3-10). לפיכך, במהלך האתחול, המשמרת הנוכחית מתבצעת על ידי שני קבלים - עבודה והתנעה, מה שמבטיח יצירת שדה מעגלי במהלך ההפעלה. לאחר הפעלת המנוע החשמלי, קבל ההתחלה כבוי עם כפתור או מתג צנטריפוגלי.
נכון להיום, מפעלי תעשיית החשמל מייצרים מנועים חשמליים עם קבלים מסדרת ABE, בעלי יעילות גבוהה, מקדם הספק המתקרב לאחדות ומאפייני התנעה ותפעול טובים. הם מכסים הספקים מ-10 עד 400 וואט במהירויות של 1,000, 1,500 ו-3,000 סל"ד (סינכרוני) עבור רשתות 127 ו-220 וולט.
סוג של מנוע חשמלי קבלים הוא מנוע חשמלי עם רוטור מסיבי המיוצר מפלדה או ברזל יצוק וללא חריצים או פיתולים. למנועים חשמליים אלו מומנט התנעה גבוה. ניתן לכוונן את מהירות הסיבוב בטווח רחב על ידי ריאוסטט במעגל המתפתל הפועל, ובכל מהירויות הסיבוב החל מ מהלך סרקעד עומס מלא המנוע החשמלי פועל ביציבות. מנועים חשמליים עם רוטור מאסיבי הם פשוטים בעיצובם, אמינים בפעולה ושקטים. מנוע חשמלי כזה ניתן להשיג מכל מנוע קבלים על ידי החלפת הרוטור שלו.
על פי מאפייני הביצועים שלהם, מנועים חשמליים עם רוטור מסיבי יכולים להחליף מנועים חשמליים לקומוטטור DC או DC. זרם חליפין. עקב הפסדים גדולים ברוטור ופיזור מגנטי, יש להם יעילות ומקדם הספק נמוכים, ולכן הם גדולים יותר בגודלם ומשקלם מאשר מנועים חשמליים מוברשים באותו הספק.
ניתן להפוך מנועים חשמליים עם פיתולי התחלה. כדי לעשות זאת, זה מספיק כדי להחליף את הקצוות של עובד או מתחיל סלילה.
3-6. דיאגרמות פיתול למנועים חשמליים חד פאזיים
מעגלים מתפתלים בנויים עבור פיתולי סטטור מבוזרים. התרשימים מציגים את המוליכים של פיתולי העבודה וההתחלה ואת החיבורים שלהם. בנוסף, התרשימים מציינים מאילו חריצים יוצאות התחלות וסופה של פיתולי העבודה וההתחלה. המסופים המתפתלים מסומנים על ידי האותיות והמספרים הבאים: ההתחלה והסוף של מתפתל העבודה C1 ו-C2, בהתאמה; ההתחלה והסוף של פיתול ההתחלה P1 ו-P2, בהתאמה.
במנועים חשמליים קבלים, סלילה ההתחלה נקראת לעתים קרובות עזר, מכיוון שהיא נשארת מופעלת במשך כל הזמן שהמנוע החשמלי פועל, והמסופים שלו מציינים: התחלה B1; סוף B2.
פיתולי הסטטור של מנועים חשמליים חד-פאזיים הם חד-שכבתיים ודו-שכבתיים. בראשון, צד הסליל תופס את כל החריץ, וכל צדדי הסלילים השוכבים בחריצים יוצרים שכבה אחת.
בפיתולים דו-שכבתיים, הצדדים של שני סלילים שוכבים בכל חריץ, מופרדים על ידי מרווח מבודד. חלקי הסלילים השוכבים בחריצים נקראים חריצים. חלקי הסלילים השוכנים מחוץ לחריצים נקראים חזיתיים.
כדי לבנות תרשים מתפתל, עליך לדעת את נתוני הסטטור הבאים:

עבור פיתולים חד-שכבתיים, גובה החריץ מחושב באמצעות הנוסחה
שלב זה נקרא דימטרי, שכן במכונות דו-קוטביות ממוקמים הצדדים של הסליל בשני חריצים מנוגדים בקוטר.
בפיתולים דו-שכבתיים, בדרך כלל משתמשים במגרש מקוצר מהסיבות הבאות. בכל מנוע חשמלי AC, מלבד הסינוסואיד הראשי עם פרק זמן של 1/50 שניות, מופיעים גם סינוסואידים בעלי פרקי זמן קצרים יותר, הנקראים הרמוניות גבוהות יותר.

במנועים חשמליים חד-פאזיים ודו-פאזיים, להרמונית השלישית בפרק זמן של 1/150 שניות יש השפעה חזקה במיוחד. זה מעוות את המאפיינים של המנוע החשמלי. הוא יוצר מה שנקרא נפילות בעקומת המומנט, שבגללן המנוע החשמלי, בעת התנעה, אינו יכול להגיע למהירות הנקובת, אלא נתקע במהירות השווה ל-1/3 מהמהירות הנקובת. רוב אמצעים יעיליםכדי להילחם בהרמונית השלישית זה לקצר את הגובה המתפתל ב-1/3 של חלוקת מוט.
מתוך איור. 3-11 ניתן לראות שעם פסיעה קוטרלית, הצדדים של הסליל שוכנים מתחת לנקודות האמצע של הקוטב הצפוני והדרומי וביצירת ה. ד.ש. כל השטף המגנטי לכל חלוקת קוטב מעורב.
באיור. איור 3-12 מציג את המיקום של סיבוב הסליל עם גובה מקוצר ב-1/3 חלוקת מוט. הסליל כבר לא מכסה את כל חלוקת המוט, אלא רק 2/3 מחלוקת המוט. לכן, למשל המושרה בו. ד.ש. יהיה פחות מאשר עם צעד קוטר, אבל ה. d.s. המושרה על ידי ההרמונית השלישית מבטלים זה את זה. צמצום ה. ד.ש. כאשר המגרש מתקצר, הוא נלקח בחשבון על ידי מקדם קיצור מתפתל. בחישובי פרק. 4 מקדם זה מוכנס לנוסחאות החישוב.
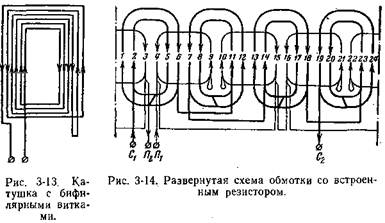
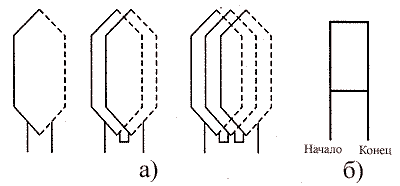
הנפוצים ביותר הם מנועים חשמליים עם נגדי התנעה מובנים. עבור מנועים חשמליים כאלה, יש צורך להשיג התנגדות פעילה גדולה של הפיתול מבלי להגדיל את ההתנגדות האינדוקטיבית שלו. זה מושג על ידי שימוש בסלילים עם סיבובים דו-פילריים. באיור. איור 3-13 מציג סליל עם סיבובים דו-פילריים. יש בסליל זה שישה סיבובים, וכולם תורמים להתנגדות הפעילה של הסליל. אבל שני הסיבובים האחרונים מפותלים בכיוון ההפוך. כאשר זרם עובר דרך הסיבובים של הסליל n.s. ארבעת הסיבובים האחרונים מקבלים פיצוי הדדי ורק שני הסיבובים הראשונים מעורבים ביצירת השטף המגנטי.
באיור. איור 3-14 מציג דיאגרמת סלילת סטטור עם נגד מובנה. לסטטור יש 24 חריצים, מתוכם 16 חריצים תפוסים על ידי סליל העבודה, ו-8 חריצים תפוסים על ידי סלילה ההתחלתית. גם לפיתולי העבודה וגם לפיתולים המתחילים יש ארבעה סלילים. לכן, מדובר במנוע חשמלי בעל ארבעה קוטבים במהירות סינכרונית של 1500 סל"ד. צד הסליל המתפתל הפועל תופס שני חריצים, וצד הסליל המתפתל ההתחלתי תופס חריץ אחד. בתרשים, החוטים השוכבים בחריצים מסומנים בקווים אנכיים. מספרי החריצים מצוינים במעברי השורות. התרשים הוא מבט מבפנים של היקף הסטטור, שהוא, כביכול, חתוך והופנה למישור. קושי מסוים בקריאת המעגל הפרוש הוא שההתחלה והסיום של הסוויפ (חריצים 1 ו-24), השוכנים זה לצד זה על הסטטור, במעגל הפרוש נראים מרוחקים זה מזה לכל אורך המעגל. , והחלק הקדמי של אחד הסלילים נחתך.
בעת קריאת דיאגרמה, עליך לעקוב מנטלית אחר הקשרים מסוף התרשים להתחלה.
בעת יצירת דיאגרמה, עליך לבחור מיקום חיתוך כך שהמספר הקטן ביותר של סלילים ייחתך וקו החיתוך ממוקם באופן סימטרי ביחס לסלילים.
הדיאגרמה המורחבת מציגה בבירור את החיבורים משני צידי הסטטור, את כיוון הזרמים ואת חילופי הקוטביות. בתרשים זה, מניחים את כיווני הזרמים בפיתול מהטרמינלים C1 ו-P1. בחלקי החריצים, כיוון החצים למעלה ולמטה מחלק את הפיתול לארבעה אזורים בהתאם למספר הקטבים של המנוע החשמלי. הקווים האלכסוניים בחלקים הקדמיים מראים מעברים מסליל קוטב אחד לאחר.
כדי ליצור סיבובים דו-פילריים, כל סליל של פיתול ההתחלה מסובב משני סלילים, ואז אחד מהם מסובב 180 מעלות. זה יוצר לולאות הנראות בחריצים 9, 10, 21 ו-22.
הנוהל לעריכת דיאגרמה והנחת הפיתול בחריצים נקבע בסעיף 5-8.
באיור. איור 3-15 מציג תרשים של פיתול הסטטור של מנוע חשמלי מסוג קבלים מסוג ABE. מדובר בפיתול דו-שכבתי ולכן כל חריץ מצוין בתרשים בשני קווים אנכיים.הקו המקווקו מציין את צד הסליל המונח בתחתית החריץ, והקו המוצק מציין את צד הסליל השוכן ב- החלק העליון של החריץ. הפיתול כולו מורכב מסלילים סימטריים בעלי אותו מרווח חריץ. קווים עבים מציינים את הסלילים של הפיתול הפועל, וקווים דקים מציינים את הפיתול ההתחלתי (העזר).
לסטטור שני קטבים. הגובה הקוטרלי של הפיתול לאורך החריצים יהיה z = 18/2 = 9. משמעות הדבר היא שהסליל הראשון צריך להיות ממוקם בחריצים 1 ו-10, שכן 1+9=10.

מהתרשים ניתן לראות שהסליל מונח בחריצים 1 ו-8. זה אומר שמדובר בפיתול עם גובה מקוצר. הגובה מתקצר בחלוקת קוטב של 2/9, כך שההרמוניה השלישית אינה מפוצה במלואה.
כמו כל מנוע חשמלי של קבלים, כל פיתול תופס מחצית מחריצי הסטטור, כלומר תשעה חריצים כל אחד. אבל מכיוון שתשע הוא מספר אי-זוגי, סלילה העבודה של המוט הראשון תופסת ארבעה חריצים (1, 2, 3 ו-4), והסלילה של המוט השני תופסת חמישה חריצים (10, 11, 12, 13 ו-14).
על מנת שהסלילים של פיתולי העבודה וההתחלות יוסטו ב-90 מעלות חשמלית, פיתול ההתחלה של המוט הראשון תופס חמישה חריצים (5, 6, 7, 8 ו-9), והקוטב השני - ארבעה חריצים (15). , 16, 17 ו-18). יש צורך לנקוט בסידור אסימטרי של פיתולים במנועים חשמליים מתוצרת המפעל כדי להשתמש באותה חותמת עבור יריעות סטטור כאשר מספרים שוניםמוטות.
פיתולים שכבה כפולה נעשים כדלקמן. בכל פיתול, סלילים של מוט אחד מחוברים בסדרה ויוצרים קבוצת סלילים. קבוצה זו מלופפת באמצעות חוט רציף על גבי תבנית בעלת חריצים רבים כמו מספר החריצים התפוסים על ידי צד הסליל בסטטור. סלילי הפצע ממוקמים בחריצים מבודדים עם שרוולים. ראשית, הכנס את הצדדים התחתונים של הסלילים, השוכבים בתחתית החריצים, ולאחר מכן את העליונים.
לאחר מכן מכופפים את קצוות השרוולים הבולטים מהחריצים והחריצים תקועים עם טריזים עשויים טקסטוליט או עץ קשה.
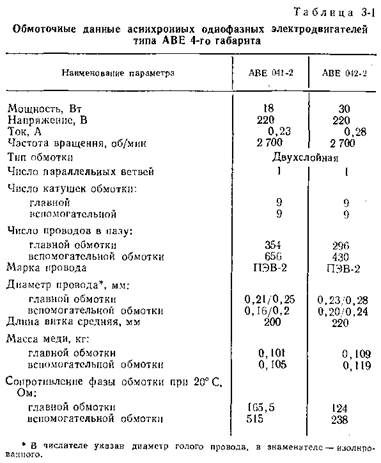
בשולחן 3-1 מציג את נתוני הפיתול של מנועים שהפיתולים שלהם מיוצרים על פי תכנית זו. מדובר במנועים חשמליים בגודל 4 עם אותם קוטרי סטטור, אך באורכים שונים.
N.V. וינוגרדוב, יו.נ. וינוגרדוב
כיצד לחשב וליצור מנוע חשמלי בעצמך
מוסקבה 1974
מתחי רשת ומעגלים פיתולי סטטורמנוע חשמלי
אם בדרכון של המנוע החשמלי מצוין למשל 220/380 V, המשמעות היא שניתן לחבר את המנוע החשמלי גם לרשת 220 V (דיאגרמת חיבור מפותלת - משולש) וגם לרשת 380 V (דיאגרמת חיבור מפותלת - כוכב). לפיתולי הסטטור של מנוע חשמלי אסינכרוני יש שישה קצוות.
על פי GOST, לפיתולים של מנוע אסינכרוני יש את הכינויים הבאים: שלב I - C1 (התחלה), C4 (סוף), שלב II - C2 (התחלה), C5 (סוף), שלב III - C3 (התחלה), C6 (סוף).
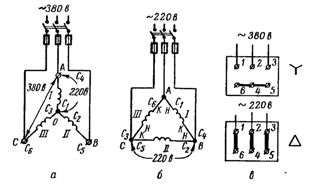
אורז. 1. דיאגרמת חיבור של פיתולי מנוע אסינכרוני: a - בכוכב, b - במשולש, c - ביצוע של מעגלי "כוכב" ו"דלתא" בלוח המסופים.
אם המתח ברשת הוא 380 V, אז יש לחבר את פיתולי הסטטור של המנוע בתצורת כוכב. IN נקודה משותפתבמקרה זה, כל ההתחלות (C1, C2, C3) או כל הקצוות (C4, C5, C6) נאספים. מתח של 380 וולט מופעל בין קצוות הפיתולים AB, BC, CA. בכל שלב, כלומר בין נקודות O ו-A, O ו-B, O ו-C, המתח יהיה פי 3 פחות: 380/√3 = 220 V.


שיטות לחיבור מנועים חשמליים
אם המתח ברשת הוא 220 וולט (עם מערכת מתח של 220/127 וולט, שכרגע נמצא כמעט בשום מקום), יש לחבר את פיתולי הסטטור של המנוע בתבנית דלתא.
בנקודות A, B ו-C, ההתחלה (H) של הפיתול הקודם מחוברת לסוף (K) של הפיתול העוקב ולשלב הרשת (איור 1, ב). אם נניח שבין נקודות A ל-B שלב I מופעל, בין נקודות B ו-C - שלב II, ובין נקודות C ו-A - שלב III, אז בסכמת "המשולש" מחוברים הדברים הבאים: תחילתו של I (C1) עם סוף III(C6), מתחיל II (C2) עם סוף I (C4) ותחילת III (C3) עם סוף II (C5).
בחלק מהמנועים, הקצוות של שלבי הפיתול מובאים אל לוח המסוף. על פי GOST, ההתחלה והקצה של הפיתולים מופקים בסדר המוצג באיור 1, ג.
אם כעת יש צורך לחבר את פיתולי המנוע בתצורת כוכב, המסופים שאליהם מוציאים את הקצוות (או ההתחלות) סגורים זה לזה, ושלבי הרשת מחוברים למסופי המנוע שאליהם ההתחלות (או קצוות) מוציאים החוצה.
בעת חיבור פיתולי המנוע ב"משולש", המסופים מחוברים אנכית בזוגות ושלבי הרשת מחוברים למגשרים. מגשרים אנכיים מחברים את תחילת I לסוף שלב III, תחילת II לסוף שלב I, ותחילת III לסוף שלב II.
בעת קביעת תרשים החיבור המתפתל, אתה יכול להשתמש בטבלה הבאה:

דרכון מנוע חשמלי
קביעת מסופים תואמים (התחלות וקצוות) של שלבי פיתול הסטטור.
בטרמינלים של פיתולי הסטטור של המנוע יש בדרך כלל סימון סטנדרטיעל טבעות דחיסה ממתכת. עם זאת, טבעות קרימפ אלו אבודות. לאחר מכן מתעורר הצורך להגדיר מסקנות עקביות. זה נעשה בסדר הזה.
ראשית, באמצעות מנורת בדיקה, נקבעים זוגות מסופים השייכים לפיתולי פאזה בודדים (איור 2).
אורז. 2. קביעת פיתולי פאזה באמצעות מנורת בדיקה.
אחד מששת המסופים של פיתול הסטטור המנוע מחובר למסוף הרשת 2, וקצה אחד של מנורת הבדיקה מחובר למסוף הרשת השני 3. הקצה השני של מנורת הבדיקה נוגע לסירוגין בכל אחד מחמשת המסופים האחרים של פיתולי הסטטור עד שהמנורה נדלקת. אם המנורה נדלקת, זה אומר ששני המסופים המחוברים לרשת שייכים לאותו פאזה.
יש צורך להבטיח שהמסופים של הפיתולים לא יקצרו זה עם זה. כל זוג טרמינלים מסומן (למשל, על ידי קשירתו בקשר).
לאחר שקבענו את השלבים של סלילה הסטטור, אנו ממשיכים לחלק השני של העבודה - קביעת המסקנות המותאמות או "ההתחלות" ו"הסופים". חלק זה של העבודה יכול להיעשות בשתי דרכים.
1. שיטת טרנספורמציה.מנורת בקרה נדלקת באחד השלבים. שני השלבים האחרים מחוברים בסדרה וכוללים גם את הרשת.
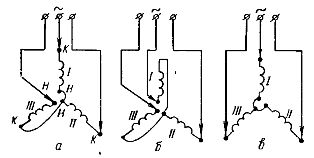
אם שני הפאזות הללו מתבררות כמופעלות כך שבנקודה O ה"סוף" המותנה של פאזה אחת מחובר ל"התחלה" המותנית של אחר (איור 3, א), אז התו המגנטי ∑Ф חוצה את השלישי מתפתל ומעורר בו EMF.
המנורה תציין נוכחות של EMF עם זוהר קל. אם החום אינו מורגש, אז אתה צריך להשתמש במד מתח בקנה מידה של עד 30 - 60 V כאינדיקטור.

אורז. 3. קביעת התחלות וסיום בפיתולי הפאזה של המנוע בשיטת הטרנספורמציה
אם, למשל, ה"קצוות" המותנים של הפיתולים נפגשים בנקודה O (איור 3, ב), אז השטפים המגנטיים של הפיתולים יופנו זה לזה. השטף הכולל יהיה קרוב לאפס, והמנורה לא תאיר (מד המתח יראה O). במקרה זה, יש להחליף את המסופים השייכים לכל אחד מהשלבים ולהפעיל אותם שוב.
אם למנורה יש חום (או שמד המתח מראה מתח מסוים), יש לסמן את הקצוות. לאחד הטרמינלים הנפגשים בנקודה המשותפת O ניתן תג המסומן H1 (תחילת שלב I), והטרמינל השני מסומן K3 (או K2).
תגיות K1 ו-H3 (או H2) ממוקמות על המסופים הממוקמים בקשרים משותפים (קשורים במהלך החלק הראשון של העבודה) עם H1 ו- K3, בהתאמה.
כדי לקבוע את המסופים התואמים של הפיתול השלישי, הרכיבו את המעגל המוצג באיור 3, ג. המנורה נדלקת באחד השלבים עם המסופים שכבר מסומנים.
2. שיטת בחירת שלבים.שיטה זו לקביעת המסופים התואמים (התחלות וקצוות) של שלבי פיתול הסטטור יכולה לשמש עבור מנועים שאינם עוצמה גבוהה- עד 3 - 5 קילוואט.
אורז. 4. קביעת "התחלות" ו"סופות" של הפיתול על ידי בחירת מעגל "כוכב".
לאחר קביעת המסופים של הפאזות הבודדות, הם מחוברים באופן אקראי לכוכב (טרמינל אחד מפאזה מחובר לרשת, ומסוף אחד בכל פעם מחובר לנקודה משותפת) והמנוע מחובר ל הרשת. אם כל ה"התחלות" המותנות או כל ה"סוף" פוגעות בנקודה המשותפת, המנוע יפעל כרגיל.
אבל אם אחד מהשלבים (III) מתברר כ"הפוך" (איור 4, א), אז המנוע מזמזם בחוזקה, למרות שהוא יכול להסתובב (אבל ניתן להאט אותו בקלות). במקרה זה, יש להחליף את המסקנות של כל אחת מהפיתולים באופן אקראי (לדוגמה, I) (איור 4, ב).
אם המנוע מזמזם שוב ועובד בצורה גרועה, יש להפעיל שוב את השלב כמו קודם (כמו בתרשים א), אך יש להפעיל את השלב השני - III (איור 3, ג).
אם המנוע עדיין מזמזם לאחר מכן, יש להגדיר גם את השלב הזה כמו קודם, ולהפוך את השלב הבא - II.
כאשר המנוע מתחיל לפעול כרגיל (איור 4, ג), יש לסמן את כל שלושת הטרמינלים המחוברים לנקודה משותפת באותו אופן, למשל, "קצוות", ואת ההפוכים - "התחלות". אחרי זה אתה יכול לאסוף תרשים עבודההמצוין בדרכון המנוע.

יש מנוע אסינכרוני תלת פאזי שאין לו בלוק מסוף; שישה קצוות של חוטים יוצאים החוצה, אבל אתה לא יכול להבין את החבילה שיוצאת. בואו ננסה להבין את הבעיה הזו ביחד.
קודם כל, התאמה. ההתנגדות תקינה - אנו קוראים (מוצאים) לכל פיתול, אתה יכול להשתמש באותו מגוהמטר, אבל עדיף להשתמש במד אוהם. אחד החליט - עלינו לסמן מיד את מסקנותיו. נעשה זאת עבור כל שלושת הפיתולים. אתה יכול לסמן אותו כרצונך, אבל לכל סיכה חייבת להיות שם משלה כדי שהיא לא תתבלבל עם סיכה אחרת.
לדוגמה, הגדרתי את L1 המתפתל הראשון, הקצוות שלו סומנו H1, K1. למה? אנו נקבע את ההתחלה והסוף של פיתולי הסטטור. איפה ההתחלה ואיפה הסוף של הראשון, זה לא משנה. העיקר שאחרים יסכימו איתה. לכן, בפיתול הראשון, טרמינל אחד מיועד להתחלה (H1), השני - הסוף (K1), כדי לא לשכתב אותו מאוחר יותר. הסימון יכול להיעשות עם טוש על קמבריות המונחות על החוטים, אפשר להדביק פיסת נייר פשוטה עם סרט, ואז להמיר אותה לקמבריקה. זה אפילו יותר נוח על הנייר כאשר אתה צריך לעשות מחדש את הסימונים. אבל אתה יכול מיד לשים צינור עם ייעוד על המסופים H1, K1, הכל מוכן.
אנו מגדירים L2, מסמנים את המסקנות שנמצאו כ-2, 3. עבור השלישי (L3) - מספרים 4, 5.
כעת, למעשה, נקבע את ההתחלה והסוף של הפיתולים של מנוע אסינכרוני. בצע את רצף הפעולות בסדר הבא: 
- אנו מחברים חוט עם המספר 2 למסוף K1 (איור 1).
- אנו מחברים מד מתח לפינים 4, 5 כדי למדוד מתח חילופין.
- אנו מחברים 220V לחוטים H1, 3, אפשר פחות, אבל רק מתח AC.
- רשום את קריאת מד המתח וכבה את המתח.
- אנו משנים חוטים 2, 3 זה עם זה; חבר את המתח, רשום את קריאת מד המתח.
קריאת מד מתח גבוה משמעותית מעידה חיבור נכוןפיתולים H1, K1 - 2, 3. נניח שהקריאה הגבוהה ביותר הייתה עם החיבור הראשון. זה אומר שפין 2 הוא ההתחלה ופין 3 הוא הסוף. לבסוף אנו מסמנים חוט 2 כ-H2, וחוט 3 כ-K2.
נוסף.
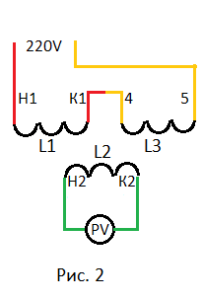
- במקום כעת H2, K2, אנו מחברים חוט 4 ל-K1, ומד מתח ל-H2, K2 (איור 2).
- אנו מפעילים מתח על חוטים H1, 5. אנו מקליטים את הקריאה.
- כבה את המתח. אנו משנים חוט 4 מחוט 5. הפעל אותו. סִימָן.
נניח שבמקרה השני קריאת מד המתח הייתה גבוהה משמעותית. המשמעות היא שחוט 5 הוא ההתחלה של L3 (מסומן כ-H3), חוט 4 הוא הסוף של L3 (K3).
לפיכך, ההתחלה והסוף של פיתולי הסטטור של המנוע האסינכרוני נקבעו, רק .
חָשׁוּב רְכִיבמנועים חשמליים - הפיתולים שלו, שבהם מתרחשים תהליכי העבודה העיקריים להמרת אנרגיה. הסוגים הנפוצים ביותר של מכונות חשמליות כוללים:
פיתולים תלת פאזיים של מכונות זרם חילופין, המשמשים בדרך כלל בסטאורים של מכונות אסינכרוניות וסינכרוניות תלת פאזיות, כמו גם ברוטורים מנועים אסינכרונייםעם טבעות החלקה.
פיתולים חד פאזייםסטטורים אסינכרוניים מנועים חד פאזייםעם רוטור של כלוב סנאי.
פיתולים של אבזור של מכונות קומוטטור של זרם חילופין ישיר וחד פאזי.
פיתולי הרוטור קצרים מנועים חשמליים אסינכרוניים.
פיתולי עירור של מכונות סינכרוניות וקומוטטור.
פיתולי השדה של מכונות סינכרוניות וקומוטטור מורכבות, ככלל, מסלילי קוטב פשוטים יחסית. העיצוב של פיתולים קצרים של הרוטורים של מנועים אסינכרוניים הוא גם פשוט. סוגי הפיתולים הנותרים המפורטים לעיל הם די מערכות מורכבותמוליכים מבודדים הממוקמים בחריצים, מחוברים לפי מעגלים מיוחדים הדורשים לימוד מיוחד.
סיבוב פיתולים:
האלמנט הפשוט ביותר של סלילה הוא סיבוב, המורכב משני מוליכים מחוברים בסדרה הממוקמים בחריצים, הממוקמים בדרך כלל מתחת לקטבים מנוגדים סמוכים.
מוליכים הסליל השוכבים בחריצים הם הצדדים הפעילים שלו, שכן כאן ה-EMF מושרה מהשדה המגנטי הראשי של המכונה. חלקי הסליל הממוקמים מחוץ לחריץ, מחברים את המוליכים הפעילים זה לזה וממוקמים בקצות המעגל המגנטי, נקראים החלקים הקדמיים.
המוליכים היוצרים סיבוב יכולים להיות מורכבים ממספר חוטים מקבילים. זה נעשה בדרך כלל כדי להפוך את הפיתול לרך ולהקל על ההתאמה לחריצים.
סיבוב אחד או יותר המחוברים בסדרה יוצרים סליל או קטע מתפתל. אם הקטע מורכב מסיבוב אחד, אז סלילה כזו נקראת פיתול מוט, שכן במקרה זה המוליכים הממוקמים בחריצים מייצגים בדרך כלל מוטות נוקשים. פיתול המורכב מקטעים מרובי סיבובים נקרא פיתול סליל.
סליל מתפתל:
סליל, או קטע מתפתל, מאופיין במספר הסיבובים wc וגובה y, כלומר, מספר שיני המעגל המגנטי שהוא מכסה. כך, למשל, אם צד אחד של הסליל (חתך) נמצא בחריץ הראשון, והשני בשישי, אז הסליל מכסה חמש שיניים והגובה שלו הוא חמש (y = 5). לכן, ניתן להגדיר את הגובה כהפרש בין מספרי החריצים שבהם ממוקמים שני צידי הסליל (y = 6 - 1 = 5).
לעתים קרובות בנתונים מפותלים ו ספרות טכניתהמדרגה מסומנת על ידי מספרי החריצים (החל מהראשון) שבהם מונחות הצדדים של הסליל, כלומר במקרה זה ייעוד זה נראה כך: y = 1 - 6.
גובה הפיתול נקרא דימטרי אם הוא שווה לחלוקת המוט τ, כלומר, המרחק בין הצירים של קטבים מנוגדים סמוכים, או, מה זהה, מספר החריצים (שיניים) לכל מוט. במקרה זה, y = τ = z/2p, כאשר z הוא מספר החריצים (שיניים) של הליבה שבה ממוקמת הפיתול; 2р - מספר מוטות מתפתלים.
אם גובה הסליל קטן מהגובה הקוטרלי, הוא נקרא מקוצר. קיצור פסיעה, המאופיין במקדם הקיצור ky = y / τ, נמצא בשימוש נרחב בפיתולי הסטטור של מנועים חשמליים תלת פאזיים אסינכרוניים, שכן זה חוסך את החוט המתפתל (בשל חלקי קצה קצרים יותר), מקל על הנחת הפיתול. ומשפרת את מאפייני המנועים. קיצור השלבים המיושם נע בדרך כלל בטווח של 0.85 - 0.66.
במכונה חשמלית דו-קוטבית זווית מרכזית, המקביל לחלוקה הקוטבית, שווה ל-180°. למרות שבמכונות ארבעה קוטבים זווית גיאומטרית זו היא 90°, במכונות שישה קוטבים היא 60° וכו', מקובל שבין הצירים של קטבים מנוגדים סמוכים בכל המקרים הזווית שווה ל-180 מעלות חשמליות ( 180 מעלות חשמל). במילים אחרות, חלוקת קוטב τ = 180 el. בָּרָד
ישנן פיתולים חד-שכבתיים, כאשר כל חריץ תפוס על ידי הצד של סליל אחד (חתך), ופיתולים דו-שכבתיים, כאשר הצדדים של סלילים (חתכים) שונים ממוקמים בשתי שכבות בחריצים.
דרכים לתאר פיתולים:
השיטות לתיאור הפיתולים של מכונות חשמליות הן די קונבנציונליות וייחודיות. פיתולים מכילים מספר גדולמוליכים, וכמעט בלתי אפשרי לתאר את כל החיבורים והמנצחים בציור. לכן, עלינו לפנות לתיאור הפיתולים בצורה של דיאגרמות.
הם משתמשים בעיקר בשתי שיטות עיקריות לתיאור פיתולים על דיאגרמות.
בשיטה הראשונה, המשטח הגלילי של הליבה יחד עם הפיתול (ובמכונות קומוטטור, יחד עם הקומוטטור) נחתכים, כביכול, מנטלית לאורך הגנרטריקס ונפרשים אל מישור הציור. סוג זה של מעגל נקרא מעגלים מורחבים או sweep (איור 2.1).
אורז. 2.1. תרשים מורחב של סלילה קונצנטרית תלת-פאזית חד-שכבתית עם z = 24, 2р = 4.
בשיטה השנייה, הפיתול מוקרן על מישור הניצב לציר הליבה, המראה את מבט הקצה של הפיתול (למכונות קומוטטור, בדרך כלל מצד הקומוטטור). מוליכים (או צדדים פעילים של מקטעים וסלילים) הממוקמים בחריצים על פני הליבה מתוארים במעגלים ומציגים את החיבורים הקצה (החזיתיים) של הפיתול. במידת הצורך, תאר לא רק את חיבורי הקצה של המתפתל הנראים מהצד הזה, אלא גם את אלה הממוקמים ממנו צד הפוךלליבה יש חלקים קדמיים בלתי נראים, ותמונתם במקרה זה נלקחת מעבר להיקף הליבה. ערכות מסוג זה נקראות סוף או מעגליות (איור 2.2).

אורז. 2.2. דיאגרמת פיתול סוף m = 3, z = 24, 2р = 4.
דיאגרמות פיתול סופיות ופרושות:
התוכניות הנפוצות ביותר הן אלו שנעשו בשיטה הראשונה. הם קלים יותר לקריאה וחזותיים יותר. כדי להקל על הקריאה והביצוע של דיאגרמות קצה, הם מבוצעים בצורה פשוטה (איור 2.3). אבל גם אחרי זה, עבור עטיפה שאין לו מספיק ניסיון בעבודה עם מעגלי קצה, הם נראים בלתי מובנים וקשים לקריאה. בדיאגרמות מורחבות, סידור סלילים וקבוצות סלילים, חיבור סלילים וקבוצות סלילים נראה ריאליסטי ומובן יותר.
אורז. 2.3. סיים מעגל עם 2p = 4, a = 1.
התרשימים נותנים מושג ברור למדי על המבנה והמיקום של כל האלמנטים המתפתלים והחיבורים ביניהם על הליבה. התרשימים מתארים בעיקר רק את המוליכים המתפתלים, כשהם מנסים, במידת האפשר, להשמיט את כל שאר הפרטים שמבלבלים את הדיאגרמה ומקשים על הקריאה. הנתונים הטכניים הנוספים הדרושים מסופקים בתרשימים בצורה של כתובות.
סליל או חתך בתרשים מתוארים כקו אחד, ללא קשר אם הוא מלופף בחוט אחד או במספר חוטים מקבילים, מורכב מסיבוב אחד או מרובה סיבובים. בתרשים המורחב, החתך או הסליל מתוארים כדמות סגורה, המזכירה את התצורה בפועל של החתך (סליל), שממנו מסתעפים הליכים.
במעגלי מתפתל דו-שכבתי מורחבים, הצדדים של הסלילים או הקטעים השוכבים קרוב יותר למרווח האוויר, כלומר. שכבה עליונההחריצים מוצגים בקווים מלאים, והצדדים המונחים בשכבה התחתונה מוצגים בקווים מקווקוים (מנוקדים). לפעמים (בספרים של מהדורות ישנות יותר) הצדדים הפעילים של הסלילים בשתי שכבות החריץ מתוארים כקווים מלאים, אך הצדדים המונחים בשכבה העליונה ממוקמים בצד שמאל, ואלה השוכנים בשכבה התחתונה. ממוקם בצד ימין.
על דיאגרמות של פיתולים תלת פאזיים של חוטים שלבים שוניםניתן לתאר באמצעות קווים שונים זה מזה, לדוגמה, קווים מוצקים, מקווקוים ומקווקוים צבעים שוניםאו בעוביים שונים, קווים כפולים עם הצללה שונה ביניהם.
התרשימים מציינים בדרך כלל את מספרי החריצים, מספרי לוחות האספנים, מספרי החתכים והצדדים שלהם, המספרים והסימונים של קצוות המוצא של קבוצות הסלילים, שלבי פיתול, כיווני זרמים, אזורי פאזה, מגנטיים. ניתן לציין גם עמודי שדה וכו' (איור 2.4 - 2.6).

אורז. 2.4. תרשים מורחב של מתפתל דו-שכבתי ב-z = 24, 2р = 4, q = 2.
אורז. 2.5. ייצוג קבוצות סלילים בתרשימים: א - מורחב, ב - מותנה.

אורז. 2.6. דיאגרמות מותנותסלילה סטטור דו-שכבתי: a - לשלושה שלבים ב-2p = 2; b - עבור שלב אחד ב-2p = 2, c - עבור פיתול סטאטור אחד ב-1p = 4.
ערכות נחוצות לא רק כאשר לומדים את עקרון הפעולה של פיתולים, העיצוב, המאפיינים והתכונות שלהם, אלא גם לביצוע עבודת סלילה. ללא תרשים וללא בדיקה במהלך העבודה, קשה להשלים את הפיתול, ולכן לפני שמתחילים בתיקון הפיתול יש לשרטט תרשים או למצוא דומה בספר העיון.
דיאגרמות סוף פשוטות:
יצוין כי דיאגרמות מעגלים שלמות פרושות וקצה של פיתולים מורכבים מרובי קוטב עם מספר גדולהחריצים מאוד מגושמים וקשים לקריאה.
במקרים אלה, בתהליך יצירת פיתולים, שמרכיביהם חוזרים על עצמם, נעשה שימוש לעתים קרובות בדיאגרמות מפורטות מעשיות, שבהן, למשל, מוצג רק שלב אחד (לפעמים חלק משלב). סלילה תלת פאזיאו מספר קטעים מתפתלים מכונת אספן. דיאגרמות קצה מפושטות נמצאות גם בשימוש נרחב, כאשר קבוצות סלילים שלמות מתוארות כחלק מקשת עם ייעודי מסוף, ואלמנטים מתפתלים קטנים יותר אינם מתוארים או מתוארים בנפרד בתרשים. מעגלי קצה מפושטים נוחים בעת יצירת חיבורים בין קבוצות סלילים בפיתולים מורכבים.
קביעת ההתחלה והסוף של הפיתולים של מנוע תלת פאזי.
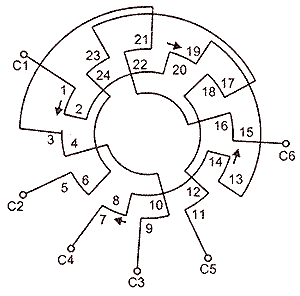
לפעמים יש מנועים חשמליים תלת-פאזיים שבהם המסופים המתפתלים אינם מסומנים, ככלל, לאחר סיבוב מחדש, או כאשר משתמשים בהם "בזהירות" מדי. כדי לקבוע את ההתחלה והסוף של הפיתולים, עליך:
- באמצעות אוהםמטר, קבע את הפיתולים, סמן שלושה זוגות - שלוש פיתולים;
- סמן חוט אחד על אחד הפיתולים וחברו אליו את סוללת המינוס;
- חבר מד מתח מצביע לפיתול השני;
- לגעת בחוט השני של הפיתול הראשון לחיוב של הסוללה, ולראות לאיזה כיוון החץ סוטה. יש צורך שהוא רוכן קדימה;
- לאחר שתוודא זאת, סמן את המסוף המחובר לחיובי של מד המתח;
- באופן דומה בדוק וסמן את הפלט בפיתול השלישי.
המסומנים המסומנים יכולים להיחשב ההתחלה או הקצוות, ובהתאם לחבר את המנוע למעגל התלת פאזי.
אנו קובעים את מספר המסופים של פיתולי הסטטור של המנוע החשמלי ומטרתם
המנוע החשמלי מחובר למקור הכוח באמצעות המסופים של הפיתולים הפנימיים שלו. פיתולים כאלה פנימה מנוע תלת פאזי- שלוש. לכן, צריכות להיות שש מסקנות בסך הכל. אבל מתחת לכיסוי, ככלל, יש שבעה חוטים, אחד מהם הוא "דיור", המחובר לבית המנוע. זה לא מעורב בתוכנית התזונתית, אבל הוא הכרחי עבור עבודה בטוחה.
לעתים קרובות קורה שמספר הלידים היוצאים מבית המנוע הוא רק שלושה. במקרה זה, שלושת המסופים הנותרים "מוסתרים" בתוך הדיור וכדי להגיע אליהם, אתה צריך לפרק בזהירות את המנוע החשמלי על ידי הסרת הרוטור. לאחר שמצאת וניתקת את שלושת החוטים החסרים (מחוברים זה לזה במעגל כוכבים), עליך להאריך כל אחד מהם ולהוציא את כולם החוצה.
לפעמים החוטים בתוך בית המנוע אינם מחוברים בכוכב (שלושה בנקודה אחת), אלא במשולש. במקרה זה, המשימה קשה יותר, אבל זהה: נתק את כל (שלושת הזוגות) של חיבורי החוטים, הארך את הקצוות והוציא אותם החוצה. נכון, במקרה שלנו זה לא כדאי לעשות, שכן כל שיטות דיאגרמות החיבור ניתנות כאן עבור מנועים חשמליים שהפיתולים שלהם מחוברים במעגל דלתא.
בדרך כלל, קופסה מותקנת על הכיסוי של בית המנוע החשמלי, המכילה בלוק מיתוג עם מגשרים; לפי התצורה שלהם, אתה יכול לעקוב בקלות אחר דיאגרמת החיבור של הפיתולים.
כיצד לקבוע לפי איזה מעגל מחוברים קצוות הפיתולים של מנוע חשמלי?
אם החיבורים של הפיתולים אינם נראים חזותית (החיבורים נעשים בתוך בית המנוע), אז תצטרך לקבוע את סוג החיבורים (כוכב או דלתא) בעקיפין. בתיאוריה, זה מאוד פשוט לביצוע.
דיאגרמת החיבור של פיתולי הכוכבים של מנוע חשמלי נעשית על ידי חיבור שלושה מסופים בעלי אותו שם (לדוגמה, קצוות) זה לזה בנקודה אחת. לכן, אם תחבר גנרטור זרם חילופין לכל שני מסופים (מתוך שלושה!) של המנוע החשמלי, אזי לא תתרחש טרנספורמציה של המתח לפיתול המשני, שעבורו משמשת הפיתול השלישי למדידות, ומד המתח. מחובר כפי שמוצג באיור. 1 לא יראה מתח או מתח קרוב לאפס וולט.
בפועל, במקום אלטרנטור, אתה יכול להשתמש בסוללה רגילה של וולט אחד וחצי (לדוגמה, 316), לחבר אותה בקצרה למסופי המנוע החשמלי. במקרה זה, יש לבצע מדידות מתח בגבול המינימלי של סולם מד המתח. אם המנוע החשמלי הוא בעל הספק גבוה, יש להתקין את המכשיר למדידת זרם (מיקרואמפר).
במקרים קיצוניים, תוך נקיטת כל אמצעי הזהירות, במקום מחולל זרם חילופין, אתה יכול להשתמש במתח רשת של 220 וולט, לחבר את המקור לפיתולים בסדרה עם מנורת 60 וואט.
כיצד לקבוע את ההתחלה והקצוות של המסופים של פיתולי המנוע החשמלי?
לאחר שלמדנו כיצד לקבוע את שיטת חיבור פיתולי המנוע החשמלי, צלצול וסימון קצוות הפיתולים הוא עניין פשוט למדי! ראשית עליך להתקשר לשלושה זוגות של מסופים מתפתלים. ההתנגדות של הפיתולים של מנועים חשמליים חזקים היא קטנה מאוד ומסתכמת בעשיריות של אוהם, ושל מנועים חשמליים בעלי הספק נמוך - יחידות של אוהם. חוט ה"גוף" השביעי נקרא ביחס לגוף. לשאר 6 החוטים אסור בשום פנים ואופן להיות במגע עם הדיור. ההתנגדות בין החוטים המתפתלים לבית היא מאות מגה אוהם.
אז, כתוצאה מדידות, יש לנו שלושה זוגות של מובילים מתפתלים וחוט "גוף" אחד. עכשיו בואו נסמן באופן אקראי את המסקנות (הסופות) של כל אחד שמתפתל באותיות "H" ו- "K" - ההתחלה והסוף. לאחר מכן, גם באופן שרירותי, אנו מסמנים את המסקנות של כל פיתול אחר באותיות "H" ו- "K" - ההתחלה והסוף.
 |
השלב הבא הוא לחבר את שני הפיתולים המסומנים זה לזה בסדרה עם המסופים "H" ו-"K", כפי שמוצג באיור. 3. לקצוות החופשיים הנותרים של הפיתולים המחוברים ("H" ו-"K" ) אנו מחברים סט מד זרם בטווח מדידה קטן (mA או אפילו μA). נחבר בקצרה מקור למסופים של הפיתול הלא מסומן זרם ישר- סוללת 1.5 וולט (אלמנט 316). מד הזרם צריך להראות עלייה במתח. אם זה לא קורה, חבר את הפיתולים המסומנים זה לזה עם המסופים "H" ו- "N", וחבר מיקרו-אמפר לקצוות החופשיים שלהם ("K" ו-"K"). אם מד הזרם מזהה גל של זרם, החלף את הכתובות "H" ו- "K" בכל פיתול אחד.
יכול לקרות שמד הזרם לא מזהה גל מתח בכל מקרה, או שהנחשול הזה חלש מאוד. סימן זה מצביע על תקלה במנוע החשמלי - קצר חשמלי של כל פיתול.
לאחר מכן, אנו מנתקים את הפיתולים, מכבים את מקור החשמל ושוב מחברים את שתי הפיתולים בסדרה. יתר על כן, אנו מחברים כל פלט של פיתול לא מסומן למסוף "H" של כל פיתול מסומן. לקצוות החופשיים הנותרים של הפיתולים המחוברים בסדרה (טרמינל "K" והפלט הלא מסומן) אנו מחברים מיקרו-אמפר שנקבע במגבלת מדידה קטנה. אנו מחברים בקצרה את מקור הכוח למסופים של הפיתול המסומן שנותר. המכשיר אמור להראות עליית מתח.
אם זה לא קורה, אז אנחנו מחליפים את ההליכים של הפיתול הלא מסומן במעגל. חבר שוב את מקור החשמל בקצרה. אם המיקרו-אמפר מזהה נחשול מתח, אז אנו מסמנים (מסמנים) את המסוף של הפיתול הלא מסומן שהיה מחובר למסוף "H" באות "K", ואת המסוף השני באות "N". את כל!
בעת מדידת זרם או מתח, לא כדאי להשתמש במולטימטר דיגיטלי, שכן עיכוב המדידה (אינדיקציה) הקיים במכשירים דיגיטליים עשוי שלא להספיק לזהות עליות זרם קצרות טווח (מתח).
חיבור הפיתולים של מנוע חשמלי תלת פאזי לפי דיאגרמת משולש
אין דבר פשוט יותר מחיבור כבלי מנוע שכבר מסומנים למעגל דלתא! אנו מחברים את הפיתולים בסדרה (בטבעת) בסדר הזה: תחילתו של אחד ("H") לסוף השני ("K"). אנו מקבלים שלוש יציאות של מנוע חשמלי, שפיתוליו מחוברים במעגל דלתא. אליהם נוסיף חוט "גוף" נוסף שיחבר אותו ללולאת ההארקה החיצונית
דרך קלאסיתחיבור מנוע חשמלי תלת פאזי לרשת חד פאזית
התרשים הפשוט והנפוץ ביותר לחיבור מנוע חשמלי תלת פאזי למקור מתח חד פאזי של 220 וולט מוצג באיור 1.
 |
ישנן שיטות לחישוב ערך הקיבול של קבל הסטת הפאזה C1, אך בחשיבות נהדרתאין לתת להם משקל, שכן חישובים אלו מובילים כמעט לאותן תוצאות שמתקבלות על ידי חישוב גס של הקיבולת באמצעות הנוסחה הפשוטה הבאה.
כאשר C הוא הקיבולת של קבל הסטת הפאזות במיקרו-פאראד, ו-P הוא ההספק הנקוב של המנוע החשמלי בקילו-וואט. גודל הקיבולת תלוי מאוד במצב הפעולה של המנוע החשמלי, במיוחד בעומס שלו.
במקרים בהם המנוע החשמלי פועל בעומסים משתנים, יש צורך להפעיל מנוע נוספים במהלך הפעולה, במקביל לקבל העברת פאזה המחובר באופן קבוע. שלעיל נוסחת חישובעובד עבור מנועים חשמליים בעומס קל. בעומסים משמעותיים, יש להכפיל את הקיבולת של קבל הסטת הפאזה מהערך המחושב.
מה קורה אם ערך הקבל נבחר בצורה לא נכונה?
אם הערך של קבל הסטת הפאזה נבחר גדול מזה הנדרש לתנאי ההפעלה הספציפיים של המנוע החשמלי, המנוע יתחמם במהירות יתר. אם ערך הקיבול נבחר פחות מהנדרש, הספק של המנוע החשמלי יקטן בהשוואה לאופטימלי. מכאן המסקנה: בבחירת קבל המרת פאזה, עליך להתחיל לבחור את ערך הקיבול מהמינימום, ולהגדיל אותו בהדרגה לערך כאשר המנוע החשמלי יכול להבטיח את הפעולה המכנית של הכונן.
מדוע מתח ההפעלה של קבל מפנה פאזה צריך להיות לפחות 400 וולט?
ישנן שלוש סיבות לכך שמתח ההפעלה של קבל המרת פאזה צריך להיות לפחות 400 וולט. הסיבה הראשונה היא שערך המשרעת של מתח החילופין ב רשת ביתית 220 וולט זה כמעט שלוש מאות וולט (220x1.3). למה? כפי שאנו זוכרים מ קורס בית ספרפיזיקה, מתח AC ביתי של 220 וולט הוא נוֹכְחִימתח.
בהגדרה: הערך האפקטיבי של זרם חילופין הוא אותו זרם ישר שמפיק את אותו הספק כמו זרם חילופין באותו זמן ובאותו עומס.
ומכיוון לזרם חילופין יש קיצוניות - נקודות עם ערכי מקסימום ומינימום, הן כמובן יהיו שונות מערך ממוצע (יעיל) כלשהו. יש להבטיח כי הקבל מחליף הפאזה יעמוד באזורים אלה של מתחים שליליים וחיוביים מוגברים.
הסיבה השנייה היא שמתח הפעולה על קבלים מוגדר בדרך כלל עבור זרם ישר. אבל מתח חילופין משנה את הקוטביות שלו לאורך זמן מ-+220 וולט ל-220 וולט. המשמעות היא שבמצבים מסוימים ניתן לטעון את הקבל עד כמעט פי שניים מערך הרשת, עד 400 וולט.
הסיבה השלישית היא שבמעגל של פיתולי סטטור מותקן קבל מחליף פאזה, שיש להם השראות גבוהה. כאשר מנוע חשמלי פועל, במיוחד בעת הפעלתו ועצירתו, משתחרר כוח אלקטרו-מוטורי גדול של אינדוקציה עצמית (EMF) על הפיתולים, בצורה של פרצים. מתח גבוה 300-600 וולט המופעל במיוחד על הקבל.
איך לבחור קיבולת אופטימליתקבל העברת פאזה?
בחירת הערך האופטימלי של הקיבולת של קבל הסטת הפאזות צריכה להתבצע בתנאי פעולה אמיתיים של המנוע החשמלי, על ידי חיבור הכונן החשמלי אליו וחיבור היעיל. מעגל התחלה
. ההליך כולו מסתכם בבחירת קבל המרת פאזה בקיבולת כזו שגודל הזרמים הזורמים לכל אחד משלושת הברזים של פיתולי המנוע החשמלי שונים זה מזה באופן מינימלי. סדר הבחירה זהה למצוין לעיל - מקיבולת קטנה לגדולה יותר. בבחירת קיבולת הקבל האופטימלית, יש לשלוט ולקחת בחשבון את החימום של בית המנוע!
מדוע המנוע החשמלי לא יתחמם יתר על המידה?
במהלך הפעולה, כל מנוע חשמלי מתחמם בהכרח. טמפרטורת בית מנוע פועל ללא נזק מאפיינים תפעולייםעשוי להגיע ל-70 מעלות צלזיוס. כדי למנוע התחממות יתר, בית המנוע מצולע כדי להגדיל את שטח הפנים המפזר חום. היעילות של הסרת חום מבית מנוע מזוהם מופחתת בחדות.
מה קורה כאשר מנוע חשמלי מתחמם יתר על המידה? ציפוי הלכה המבודד של החוטים המתפתלים מתייבש (או אפילו נשחק) ומתקלף. כתוצאה מכך, חוטים סמוכים חשופים קצרים זה את זה. קצר חשמלי מתרחש בפיתול המנוע.
קצר חשמלי, בהתאם לגודל הקטע הסגור, מוביל להתחממות יתר מהירה של המנוע החשמלי או להתכה מיידית (קצר חשמלי או שחיקה) של החוטים המתפתלים. בפועל, מנוע חשמלי עם גשר שטח קטןפיתולים (מספר סיבובים סמוכים), התחממות יתר ואיבוד כוח, עדיין יכולים לעבוד. אבל כל מחזור חדש - התחממות יתר של הפיתולים בזמן הפעולה וקירור בזמן כיבוי - מחמיר את מצב הבידוד של הפיתולים ומביא לאותה תוצאה - קילוף של הבידוד, קצר בסיבובי הפיתולים וכשל במנוע החשמלי.
בנוסף, כאשר המנוע החשמלי מתחמם יתר על המידה, המסבים בהם מסתובב הרוטור מתחממים יתר על המידה. התחממות יתר של חומר סיכה המיסבים מובילה לירידה ביעילותו ולהתחממות יתר גדולה אף יותר של המיסב. כתוצאה מכך, חומר הסיכה המחומם מאוד מתאדה חלקית, זורם חלקית מחוץ לבית המיסב והמיסב מתחיל להיתקע. עצירת חירום כפויה של המנוע החשמלי במהלך פעולתו (מבלי לנטרל אותו) מובילה גם להתחממות יתר מהירה ובלתי מתקבלת על הדעת של פיתוליו ואף לשריפה שלהם וכשל במנוע החשמלי.
כיצד לשנות את כיוון הסיבוב של רוטור מנוע חשמלי?
בדיוק כמו כאשר מנוע חשמלי מופעל ממקור תלת פאזי, כאשר הוא מופעל ממנו רשת חד פאזיתמתח של 220 וולט, הרוטור של המנוע החשמלי מונע על ידי סיבוב שדה מגנטי, שכיוון הסיבוב שלו תלוי בסדר חילופי הפאזות. כאשר המנוע החשמלי פועל, קצה אחד של קבל העברת הפאזה מחובר תמיד לנקודת חיבור חופשית של הפיתולים, והקצה השני לחוט אספקת החשמל - פאזה או ניטרלי.
 |
כיוון הסיבוב של רוטור המנוע החשמלי תלוי במקום שבו מחובר קצה הקבל של הסטת הפאזה, המחובר לחוט החשמל. פשוט, כדי לשנות את כיוון הסיבוב של רוטור המנוע החשמלי, יש לנתק את מסוף הקבלים הזה מחוט אספקת חשמל אחד ולחבר אותו לחוט ספק כוח אחר. במילים אחרות, חבר מחדש את הפלט ממסוף A של המנוע החשמלי למסוף B.
דיאגרמת התחלה למנוע חשמלי תלת פאזי בעת הפעלה ברשת חד פאזית
מנוע חשמלי תלת פאזי פועל כרגיל כאשר הוא מחובר למקור מתח AC חד פאזי עם מתח ביתי של 220 וולט. תוכניותמוצג באיורים 1 ו-2. עם זאת, לא ניתן יהיה להפעיל אותו בעומס. על מנת להבטיח סיבוב של רוטור המנוע החשמלי במהלך האתחול, יש צורך במעגל מיוחד. על פי סכימה זו, במהלך האתחול, קבל "התנעה" נוסף C2 עם קיבול זהה לזה של קבל הסטת הפאזה מחובר במקביל לקבל הסטת הפאזה (C1). תרשים כזה מוצג להלן באיור 3.
 |
בעת ההפעלה, לאחר הפעלת מתג SA, עליך ללחוץ ידנית על כפתור SB ולהחזיק אותו לחוץ למשך מספר שניות עד שמהירות הרוטור של המנוע החשמלי מגיעה ל-70% מהנומינלי.
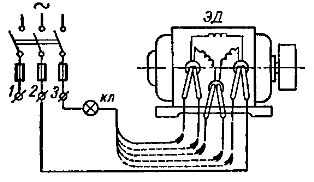
חיבור המנוע החשמלי לרשת באמצעות מגע, לחצני התחלה ועצירה
במקרה של תקלות, מצבי חירום ואובדן מתח רשת יש לכבות את המנוע החשמלי במהירות ובקלות. בנוסף, בעת חידוש החשמל, על מנת למנוע פגיעה באנשים התחשמלותכדי למנוע נזק לכונן החשמלי ולמנוע החשמלי עצמו, המנוע החשמלי לא אמור להפעיל מחדש אוטומטית.
כל הדרישות הללו מתקיימות על ידי המעגל להפעלת המנוע החשמלי באמצעות מגע K1. המנוע מופעל על ידי לחיצה על כפתור "התחל". הכיבוי הבא מתבצע על ידי לחיצה על כפתור "עצור". תרשים כזה מוצג להלן באיור 4.
 |
כדי להפעיל את המנוע החשמלי, לחץ על לחצן SA1 "התחל". מתח רשת של 220 וולט מסופק לפיתול של מגע K1. ליבת המגע נסוגה, סוגרת את המגעים K1.1 ו-K1.2. המגעים של כפתור "התחל" ננעלים עם אנשי הקשר K1.1, ומגעי K1.2 מחברים את פיתולי המנוע לרשת.
כאשר כפתור "עצור" נלחץ, מעגל הפיתול של המגע K1 נפתח, והסלילה מנותקת. אנשי קשר K1.1 נפתחים, כפתור "התחל" לא נעול. מגעים K1.2 נפתחים והמתח מוסר מפיתולי המנוע. המנוע נכבה. מצב המעגל אינו משתנה גם לאחר שחרור כפתור העצור. המנוע החשמלי נשאר כבוי.
תָכְנִית התחלה אוטומטיתמנוע חשמלי תלת פאזי
בתרשים איור. 4, בדיוק כמו בתרשימים הקודמים, אתה צריך ללחוץ באופן ידני על כפתור SA3, לחבר את קבל ההתחלה C2, ולחכות שרוטור המנוע החשמלי יתפוס מהירות, וזה לא מאוד נוח. במקום כפתור ידני, אתה יכול להשתמש במעגל התנעה שמשתמש ממסר עיכוב, עם זמן עיכוב הפעלה מוגדר (לאחר אספקת מתח אליו) של 3-10 שניות. התרשים להחלפת כפתור ידני לכפתור אוטומטי מוצג להלן באיור 5.
 |
כאשר המנוע החשמלי מופעל, לחצן SA1 "התחל" נלחץ. מתח הרשת של 220 וולט מגיע לליפוף של מגע K1. ליבת המגע נסוגה, סוגרת את המגעים K1.1 ו-K1.2. אנשי הקשר K1.1, כמו בתרשים הקודם, חוסמים בעצמם את כפתור "התחל" (אנשי הקשר שלו מגושרים), ואנשי הקשר K1.2 מחברים את פיתולי המנוע לרשת. בשלב זה, קבל התחלתי C2 מחובר דרך המגעים הסגורים בדרך כלל של ממסר ההשהיה KT1.1 במקביל לקבל C1 מעביר הפאזה.
במקביל לאספקת המתח למגע K1, מתח האספקה מסופק לממסר ההשהיה KT. הספירה לאחור של זמן ההשהיה לפתיחת המגעים הסגורים בדרך כלל KT1.1 של ממסר KT מתחילה. לאחר מספר שניות של עיכוב, ממסר ה-KT מופעל, ופותח את מגעי ה-KT1.1. קבל ההתחלה C2 מנותק מהקבל C1 מעביר הפאזה. תהליך האתחול הושלם.
חיבור קבל ההתחלה באמצעות מגעים רבי עוצמה
חיבור קבל התחלתי במקביל לקבל המרת פאזה מלווה בניצוץ חזק של המגעים. מגעים בעלי הספק נמוך של ממסר ההשהיה K1, כפי שמוצג בתרשים הקודם, לא יוכלו להבטיח פעולה ארוכת טווח של המנוע החשמלי במצב התנעה. הם פשוט יידבקו או יישרפו. לכן, רצוי לשלוט בחיבור של קבל ההתחלה עם המגעים של ממסר חזק (מגע). תרשים כזה מוצג באיור 6.
 |
כאשר אתה לוחץ על כפתור "התחל", מתח מופעל באותו אופן על ממסר ההשהיה KT1. אבל בעת האתחול, קבל ההתחלה C2 יתחבר מיד לקבל הסטת הפאזה דרך המגעים של המגע הנוסף K2, שפיתולו, בתורו, יחובר באתחול לרשת 220 וולט דרך המגעים הסגורים בדרך כלל. של ממסר ההשהיה KT1.
כאשר עיכוב הזמן של ממסר KT1 מסתיים, הוא יידלק והמגעים שלו KT1.1 ייפתחו, תוך ניתוק המעגל המתפתל של מגע K2 ממקור ה-220 וולט. הפיתול של המגע K2 יופסק, המגעים שלו K2.1 ייפתחו וינתקו את קבל ההתחלה C2 מהקבל C1 מחליף הפאזה, ובכך ישלימו את תהליך ההתחלה.
הגנת זרם של מנוע חשמלי תלת פאזי
בתרשימים לעיל, מתפתל המנוע החשמלי מחובר כל הזמן לרשת 220 וולט, מה שיוצר סכנת התחשמלות לאנשים ואינו עומד בדרישות הבטיחות. עם סיום העבודה, הכלי החשמלי חייב להיות מובטל לחלוטין. מתח מסכן חיים של 220 וולט לא אמור להיות קיים על אף חלק של הציוד החשמלי.
בנוסף, יש צורך להגן על המנוע החשמלי מפני נזק חמור כאשר קצריםמעגלים או רכיבים נושאי זרם של תכנון מנוע חשמלי. כדי להגן על חיווט חשמלי חיצוני מפני זרמים קריטיים וחירום, יש צורך גם בהגנה על זרם. הגנה כזו יכולה להתבצע בהצלחה על ידי תלת פאזי המכונה הנוכחית. תרשים החיבור של המנוע החשמלי דרך מפסק הזרם מוצג באיור 7.
כאשר מפסק הזרם SA3 מופעל, הנורית הכחולה VL1.1 נדלקת. כאשר המנוע החשמלי מתניע ופועל, נורית ה-LED האדומה VL1.2 (הימנית בתרשים) נדלקת, והנורית הכחולה כבה. נגדים R1 ו-R2, כל אחד בדירוג של 1 וואט, מגבילים את הזרם דרך הנוריות ל-4 מיליאמפר. דיודות VD1 ו-VD2 מגנות על נוריות הלד מפני התמוטטות על ידי מתח הפוך של 220 וולט.