ממספר רב של סוגי מנועים חשמליים זרם חליפין, בשימוש בהנדסת חשמל מודרנית, הנרחב, הנוח והחסכוני ביותר הוא מנוע עם שדה מגנטי מסתובב, המבוסס על שימוש בזרם תלת פאזי.
כדי להבין את הרעיון הבסיסי העומד בבסיס התכנון של מנועים אלה, הבה נחזור שוב לניסוי המתואר באיור. 264. ראינו שם שטבעת מתכת המונחת בשדה מגנטי מסתובב מתחילה להסתובב באותו כיוון שבו מסתובב השדה. הסיבה לסיבוב זה היא העובדה שכאשר השדה מסתובב, השטף המגנטי דרך הטבעת משתנה ובמקביל נוצרים זרמים בטבעת, עליהם השדה פועל בכוחות שכבר מוכרים לנו, ויוצרים מומנט. .
בנוכחות זרם תלת פאזי, כלומר מערכת של שלושה זרמים המוזזים בפאזה זה ביחס לזה ב-(שליש תקופה), קל מאוד לקבל שדה מגנטי מסתובב ללא סיבוב מכני של המגנט וללא כל מכשירים נוספים. אורז. 351,a מראה כיצד זה נעשה. כאן יש לנו שלושה סלילים מותקנים על ליבות ברזל, הממוקמים בזווית של 120 מעלות זה לזה. דרך כל אחד מהסלילים הללו עובר אחד מהזרמים של המערכת, המהווים זרם תלת פאזי. בסלילים נוצרים שדות מגנטיים, שכיוונם מסומן בחצים. האינדוקציה המגנטית של כל אחד מהשדות הללו משתנה עם הזמן לפי אותו חוק סינוסואידי של הזרם המקביל (איור 351, ב). לפיכך, השדה המגנטי במרווח שבין הסלילים הוא תוצאה של סופרפוזיציה של שלושה שדות מגנטיים מתחלפים, שמצד אחד מכוונים בזווית של 120° זה לזה, ומצד שני, הם הוסט בשלב על ידי . הערך המיידי של האינדוקציה המגנטית המתקבלת הוא הסכום הווקטור של שלושת השדות המרכיבים ב הרגע הזהזְמַן:
![]() .
.
אם כעת נתחיל לחפש כיצד האינדוקציה המגנטית המתקבלת משתנה לאורך זמן, אז החישוב מראה שבערך מוחלט האינדוקציה המגנטית של השדה המתקבל אינה משתנה (שומרת על ערך קבוע), אלא כיוון הווקטור מסתובב באופן אחיד, מתאר מהפכה מלאה במהלך תקופה נוכחית אחת.
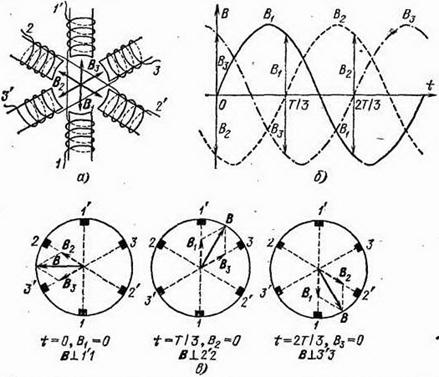
אורז. 351. מתחיל להסתובב שדה מגנטיכאשר מוסיפים שלושה שדות סינוסואידיים המכוונים בזווית של 120° זה לזה ומוזזים בשלב על ידי: א) מיקום הסלילים יצירת שדה מסתובב; ב) גרף של שינויים בהשראת השדה לאורך זמן; ג) האינדוקציה המתקבלת היא קבועה בגודלה ומסתובבת על מעגל לאורך תקופה
מבלי להיכנס לפרטי החישוב, נסביר כיצד הוספת שלושה שדות נותנת שדה מסתובב קבוע בגודלו. באיור. חצים 351, b מסמנים את ערכי האינדוקציה המגנטית של שלושה שדות ברגע שבו, ברגע שבו, וברגע שבו, ובאיור. 351,c התוספת מתבצעת על פי כלל המקבילית של אינדוקציות מגנטיות ובשלושת הרגעים הללו, וכיווני החצים ו-, ו- ומתאימים לאור. 351, א. אנו רואים שהאינדוקציה המגנטית המתקבלת היא בעלת אותו גודל בכל שלושת הרגעים המצוינים, אך הכיוון שלה מסתובב במשך כל שליש מהתקופה בשליש מהמעגל.
אם טבעת מתכת (או, אפילו טוב יותר, סליל) ממוקמת בשדה מסתובב כזה, אזי ייווצרו בה זרמים באותו אופן כאילו הטבעת (סליל) מסתובבת בשדה נייח. האינטראקציה של השדה המגנטי עם זרמים אלו יוצרת כוחות המסובבים את הטבעת (סליל). זהו הרעיון המרכזי של מנוע תלת פאזי עם שדה מסתובב, שיושם לראשונה על ידי M. O. Dolivo-Dobrovolsky.
המבנה של מנוע כזה ברור מאיור. 352. חלקו הנייח - הסטטור - הוא גליל המורכב מפח, שעל פניו הפנימיים חריצים מקבילים לציר הגליל. חוטים מונחים בחריצים אלה, מחוברים זה לזה לאורך צידי הקצה של הסטטור כך שהם יוצרים שלושה סלילים המסובבים ב-120 מעלות זה לזה, אשר נדונו בפסקה הקודמת. ההתחלה של סלילים אלה 1, 2, 3 וקצותיהם 1", 2", 3" מחוברים לשישה מהדקים הממוקמים על מגן המותקן על מסגרת המכונה. מיקום המהדקים מוצג באיור 353.
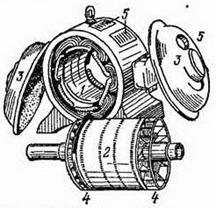
אורז. 352. מנוע AC תלת פאזי מפורק: 1 – סטטור, 2 – רוטור, 3 – מגיני מיסבים, 4 – מאווררים, 5 – חורי אוורור

אורז. 353. מיקום מהדקים על מגן המנוע
בתוך הסטטור נמצא החלק המסתובב של המנוע – הרוטור שלו. זהו גם צילינדר המורכב מיריעות פלדה נפרדות, המורכב על ציר, יחד איתו הוא יכול להסתובב במיסבים הממוקמים במגני הצד (הכיסויים) של המנוע. בקצוות של צילינדר זה ישנם להבי אוורור, אשר, כאשר הרוטור מסתובב, יוצרים זרם חזק של אוויר במנוע, המקרר אותו. על פני השטח הגלילי של הרוטור, בחריצים מקבילים לציר שלו, יש סדרה של חוטים המחוברים בטבעות בקצות הגליל. רוטור כזה, המוצג בנפרד באיור. 354, נקרא "קצר חשמלי" (נקרא לפעמים "גלגל סנאי"). הוא מתחיל להסתובב כאשר מופיע שדה מגנטי מסתובב בחלל שבתוך הסטטור.
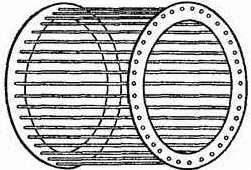
אורז. 354. רוטור כלוב סנאי של מנוע תלת פאזי
השדה המסתובב נוצר על ידי מערכת תלת פאזית של זרמים המסופקים לפיתולי הסטטור, אשר יכולים להיות מחוברים זה לזה או על ידי כוכב (איור 355) או משולש (איור 356). במקרה הראשון (§ 170), המתח על כל סלילה קטן פי כמה מהמתח הליניארי של הרשת, ובשני הוא שווה לו. אם, למשל, המתח בין כל זוג חוטים רשת תלת פאזית(מתח קו) הוא 220 וולט, אז כאשר הפיתולים מחוברים במשולש, כל אחד מהם נמצא במתח של 220 וולט, ואם הם מחוברים בכוכב, אז כל פיתול נמצא במתח של 127 וולט.
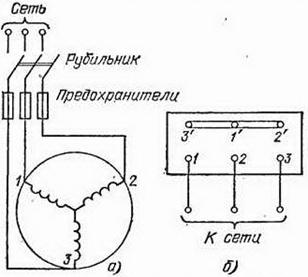
אורז. 355. הפעלת פיתולי הסטטור עם כוכב: א) דיאגרמת מיתוג מנוע; ב) חיבור המהדקים על המגן. טרמינלים 1", 2", 3" מחוברים "לטווח קצר" באמצעות פסי מתכת; חוטים של רשת תלת פאזית מחוברים לטרמינלים 1, 2, 3
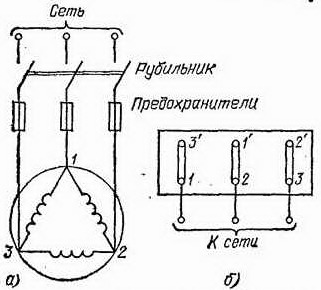
אורז. 356. הפעלת פיתולי הסטטור עם משולש: א) דיאגרמת מיתוג מנוע; ב) חיבור המהדקים על המגן. טרמינלים 1 ו-3", 2 ו-1", 3 ו-2" מחוברים באמצעות פסי מתכת; חוטים של רשת תלת-פאזית מחוברים למסופים 1, 2, 3
לפיכך, אם פיתולי המנוע מתוכננים למתח של 127 וולט, אזי המנוע יכול לפעול בהספק רגיל הן מרשת 220 וולט כאשר הפיתולים שלו מחוברים בכוכב, והן מרשת 127 וולט כאשר הפיתולים שלו מחוברים ב. משולש. הלוח המחובר למסגרת של כל מנוע מציין אפוא את שני מתחי הרשת שבהם המנוע יכול לפעול, למשל 127/220 V או 220/380 V. כאשר מחוברים לרשת עם מתח קו נמוך יותר, פיתולי המנוע מחוברים במשולש, וכאשר מופעל מרשתות עם מתח גבוה יותר מחוברות בכוכב.
המומנט של המנוע נוצר על ידי כוחות האינטראקציה בין השדה המגנטי לזרמים המושרים ממנו ברוטור, ועוצמתם של זרמים אלו (או ה-emf המתאים) נקבעת על פי תדירות הסיבוב היחסית של השדה ב ביחס לרוטור, שבעצמו מסתובב באותו כיוון כמו השדה. לכן, אם הרוטור היה מסתובב באותה תדירות כמו השדה, אז לא תהיה תנועה יחסית. אז הרוטור יהיה במנוחה יחסית לשדה ולא יתעורר בו e מושרה. d.s., כלומר לא יהיה זרם ברוטור ולא יכלו להיווצר כוחות שיגרמו לו להסתובב. מכאן ברור שמנוע מהסוג המתואר יכול לפעול רק במהירות הרוטור השונה במקצת ממהירות השדה, כלומר מהתדר הנוכחי. לכן, בטכנולוגיה מנועים כאלה נקראים בדרך כלל "אסינכרוני" (מהמילה היוונית "סינכרונוס" - חופפים או מתואמים בזמן, החלקיק "a" פירושו שלילה).
לפיכך, אם השדה מסתובב בתדירות והרוטור בתדירות, אזי סיבוב השדה ביחס לרוטור מתרחש בתדירות, ותדר זה הוא שקובע את ה-e המושרה ברוטור. ד.ש. ושוטף.
עוצמה ![]() המכונה "החלקה" בטכנולוגיה. זה ממלא תפקיד חשוב מאוד בכל החישובים. החלקה מתבטאת בדרך כלל באחוזים.
המכונה "החלקה" בטכנולוגיה. זה ממלא תפקיד חשוב מאוד בכל החישובים. החלקה מתבטאת בדרך כלל באחוזים.
כאשר אנו מפעילים מנוע לא עומס, אז ברגעים הראשונים הוא שווה לאפס או קרוב לאפס, תדירות הסיבוב של השדה ביחס לרוטור גדולה ומושרה ברוטור e. ד.ש. בהתאם, הוא גם גדול - הוא גדול פי 20 מזה e. d.s., המתרחש ברוטור כאשר המנוע פועל בהספק רגיל. גם הזרם ברוטור גבוה משמעותית מהרגיל. ברגע ההתנעה המנוע מפתח מומנט די משמעותי, ומכיוון שהאינרציה שלו קטנה יחסית, תדירות סיבוב הרוטור עולה במהירות וכמעט שווה לתדירות סיבוב השדה, כך שהתדירות היחסית שלהם הופכת כמעט שווה לאפס ו- הזרם ברוטור יורד במהירות. לקטנים ו כוח בינוניעומס יתר לטווח הקצר שלהם בעת ההפעלה אינו מהווה סכנה, אך בעת ההפעלה הוא מאוד מנועים חזקים(עשרות ומאות קילוואט) ריאוסטטים התחלתיים מיוחדים משמשים להחלשת הזרם בפיתול; כאשר הרוטור מגיע למהירות רגילה, ריאוסטטים אלה כבויים בהדרגה.
ככל שעומס המנוע גדל, מהירות הרוטור יורדת מעט, תדירות סיבוב השדה ביחס לרוטור עולה, ובמקביל גדלים הזרם ברוטור והמומנט שפותח המנוע. עם זאת, לשנות את כוח המנוע מאפס לאפס ערך תקיןנדרש שינוי קטן מאוד במהירות הרוטור, עד כ-6% מהערך המרבי. כל כך אסינכרוני מנוע תלת פאזישומר על מהירות רוטור כמעט קבועה גם עם תנודות עומס רחבות מאוד. באופן עקרוני ניתן לווסת את התדר הזה, אך המכשירים המתאימים הם מורכבים ולא חסכוניים ולכן נעשה בהם שימוש נדיר ביותר בפועל. אם מכונות המונעות על ידי מנוע דורשות מהירות סיבוב שונה מזו שהמנוע מספק, אז הן מעדיפות להשתמש בהנעי הילוכים או רצועות עם יחסי העברה שונים.
מובן מאליו שככל שעומס המנוע גדל, כלומר, הכוח המכני שהוא מייצר, לא רק הזרם ברוטור חייב לגדול, אלא גם הזרם בסטטור כדי שהמנוע יוכל לספוג את ההספק החשמלי המתאים מהרשת. זה נעשה באופן אוטומטי בשל העובדה שהזרם ברוטור יוצר גם שדה מגנטי משלו בחלל שמסביב, משפיע על פיתולי הסטטור וגורם לכמה, למשל. ד.ש. החיבור בין השטף המגנטי של הרוטור והסטטור, או כמו שאומרים "תגובת האבזור", גורם לשינויים בזרם בסטטור ומבטיח התאמה של ההספק החשמלי הנלקח מהרשת כוח מכנינתון על ידי המנוע. הפרטים של תהליך זה מורכבים למדי, ולא ניכנס אליהם.
עם זאת, חשוב מאוד לזכור שלמרות שמנוע בעומס נמוך לוקח מהרשת כמות כזו של אנרגיה התואמת לעבודה שהוא מבצע, כאשר הוא עמוס, כאשר הזרם בסטטור יורד, הדבר נובע מעלייה בתגובה האינדוקטיבית של הסטטור, כלומר ירידה בגורם ההספק (§ 163), שמקלקל את תנאי ההפעלה של הרשת כולה. אם, למשל, הספק של 3 קילוואט מספיק כדי להפעיל מכונה, ואנחנו מתקינים עליה מנוע של 10 קילוואט, אז המפעל הזה לא יסבול כמעט שום נזק - המנוע עדיין ייקח רק את ההספק הנדרש להפעלתו , בתוספת הפסדים במנוע עצמו. אבל למנוע מעומס כזה יש תגובת אינדוקטיבית גדולה ומפחית את גורם ההספק של הרשת. זה לא רווחי מנקודת המבט כלכלה לאומיתבדרך כלל. כדי לעורר את המאבק לשיפור מקדם הכוח, ארגונים המספקים חשמל לצרכנים מיישמים מערכת של קנסות על היותם נמוכים מדי בהשוואה ל נורמה מבוססתגורם כוח ותמריצים להגדלתו.
לכן, בעת עבודה עם מנועים, יש להקפיד על הכללים הבאים:
1. תמיד יש צורך לבחור מנוע בעל הספק כזה שהמכונה המונעת על ידו דורשת.
2. אם עומס המנוע אינו מגיע ל-40% מהרגיל, ופיתולי הסטטור מחוברים בדלתא, אז רצוי להעביר אותם לכוכב. במקרה זה, המתח על הפיתולים יורד בפקטור, והזרם הממגנט - כמעט פי שלוש. במקרים בהם יש לבצע מיתוג כזה לעיתים תכופות, המנוע מחובר לרשת באמצעות מתג מעבר לפי התרשים המוצג באיור. 357. במצב אחד של המתג, הפיתולים מחוברים עם משולש, בשני - עם כוכב.
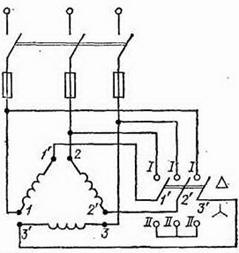
אורז. 357. תכנית למעבר פיתולי המנוע ממשולש (מצב מתג I, I, I) לכוכב (מצב מתג II, II, II)
על מנת להפוך את כיוון הסיבוב של ציר המנוע, יש צורך להחליף את שני חוטי הקו המחוברים למנוע. זה מושג בקלות באמצעות מתג קוטב כפול כפי שמוצג באיור. 358. העברת המתג מ הוראות I-Iלמיקום II-II, אנו משנים את כיוון הסיבוב של השדה המגנטי ובו זמנית את כיוון הסיבוב של פיר המנוע.

אורז. 358. דיאגרמת מיתוג לשינוי כיוון הסיבוב של מנוע תלת פאזי
ראינו שאם יש שלושה סלילים בסטטור של המנוע, מאופקים זה מזה ב-120°, השדה המגנטי מסתובב בתדירות הזרם, כלומר הוא עושה סיבוב אחד בשבריר שנייה, או 3000 סיבובים לדקה. גם ציר המנוע יסתובב כמעט באותה תדירות. במקרים רבים, מהירות סיבוב זו גבוהה מדי. כדי לצמצם אותו, לא מניחים שלושה סלילים בסטאטור המנוע, אלא שישה או שתים עשרה ומחברים כך שהקוטב הצפוני והדרומי מתחלפים סביב היקף הסטטור. במקרה זה, השדה מסתובב עבור כל תקופה נוכחית רק בחצי או רבע סיבוב, כלומר, ציר המכונה מסתובב בתדירות של כ-1500 או 750 סיבובים לדקה.
לבסוף, עוד הערה חשובה מעשית. במקרה של נזק (קלקול) של בידוד המסגרת והמארזים מכונות חשמליותושנאים מופעלים ביחס לכדור הארץ. נגיעה בחלקי מכונה אלו עלולה להיות מסוכנת לאנשים בתנאים אלו. כדי למנוע סכנה זו, במתחים מעל 150 וולט ביחס לכדור הארץ, יש להאיר את המסגרות והמארזים של מכונות חשמליות ושנאים, כלומר לחבר אותם היטב עם חוטי מתכת או מוטות לכדור הארץ. זה נעשה על פי כללים מיוחדים שיש להקפיד עליהם כדי למנוע תאונות.
לעתים קרובות למדי, מצב ההפעלה של ציוד ממוכן עזר דורש הפחתה במהירויות הסיבוב הסטנדרטיות. ניתן להשיג השפעה זו על ידי התאמת המהירות מנוע אסינכרוניבמו ידיך. כיצד לעשות זאת בפועל (חישוב והרכבה), באמצעות מעגלים סטנדרטייםניהול או מכשירים תוצרת בית, בואו ננסה להבין את זה עוד יותר.
- מנועים רוטור פצע
מהו מנוע אסינכרוני?
מנועי AC מצאו די יישום רחבבתחומים שונים של חיינו, בהרמה, הובלה, עיבוד, ציוד מדידה. הם משמשים לשינוי אנרגיה חשמלית, שמגיע מהרשת, לתוך האנרגיה המכנית של הציר המסתובב. לרוב משתמשים בהם ממירים אסינכרונייםזרם חליפין. בהם, מהירות הסיבוב של הרוטור והסטטור שונה. מרווח אוויר מבני מסופק בין האלמנטים הפעילים הללו.
הן לסטטור והן לרוטור יש ליבה קשיחה העשויה מפלדה חשמלית (סוג מורכב, עשויה לוחות), הפועלת כמעגל מגנטי, כמו גם פיתול המתאים לחריצים המבניים של הליבה. האופן שבו מאורגן או מונח סיפוף הרוטור הוא הקריטריון המרכזי לסיווג מכונות אלו.
מנועי כלוב סנאי (SCR)
כאן נעשה שימוש בפיתול בצורה של מוטות אלומיניום, נחושת או פליז, המוכנסים לחריצי הליבה ונסגרים משני הצדדים על ידי דיסקים (טבעות). סוג החיבור של אלמנטים אלה תלוי בכוח המנוע: עבור ערכים קטנים משתמשים בשיטה של יציקה משותפת של דיסקים ומוטות, ובערכים גדולים משתמשים בייצור נפרד ולאחריו ריתוך זה לזה. ניתן לראות עיצוב טיפוסי של מנועים כאלה באיור שלהלן. פיתול הסטטור מחובר באמצעות מעגלי דלתא או כוכבים.
מנועים רוטור פצע
מתחבר לרשת סלילה תלת פאזירוטור, דרך טבעות החלקה על הציר הראשי והמברשות. ערכת "כוכב" נלקחת כבסיס. האיור שלהלן מציג עיצוב טיפוסי של מנוע כזה.

עקרון הפעולה והמהירות של מנועים אסינכרוניים
הבה נשקול את הנושא הזה באמצעות הדוגמה של ADKR, כסוג הנפוץ ביותר של מנועים חשמליים בציוד הרמה, הובלה ועיבוד. מתח הרשת מסופק לליפוף הסטטור, שכל אחד משלושת השלבים שלו נעקר גיאומטרית ב-120 מעלות. לאחר הפעלת מתח, נוצר שדה מגנטי, היוצר, באינדוקציה, EMF וזרם בפיתולי הרוטור. זה האחרון גורם לכוחות אלקטרומגנטיים הגורמים לסיבוב הרוטור. סיבה נוספת לכך שכל זה קורה, כלומר מתרחשת EMF, היא ההבדל במהירות של הסטטור והרוטור.
אחד מ מאפיינים מרכזייםשל כל ADCR הוא תדר הסיבוב, אותו ניתן לחשב באמצעות הקשר הבא:
n=60f/p, rpm
כאשר f הוא התדר של מתח הרשת, הרץ; p – מספר זוגות עמודי סטטור.
את כל מפרטיםמצוין על לוחית מתכת המחוברת לבית. אבל אם הוא חסר מסיבה כלשהי, אז ניתן וצריך לקבוע את מספר המהפכות באופן ידני באמצעות אינדיקטורים עקיפים. בדרך כלל משתמשים בשלוש שיטות עיקריות:
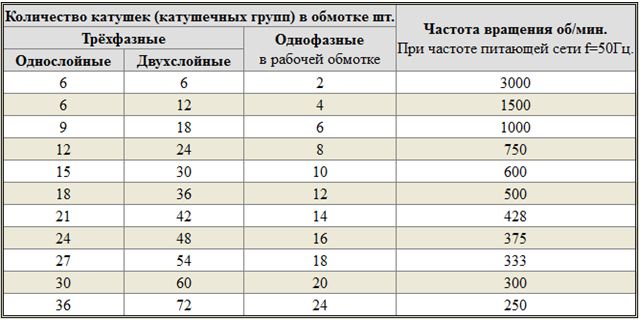
- חישוב מספר הסלילים. הערך המתקבל מושווה עם הסטנדרטים הנוכחייםעבור מתח 220 ו-380V (ראה טבלה למטה);
- חישוב מהפכות תוך התחשבות בגובה הקוטר של הפיתול. כדי לקבוע, נעשה שימוש בנוסחה של הטופס:
כאשר 2p - מספר מוטות; Z 1 - מספר חריצים בליבת הסטטור; y - למעשה, שלב הנחת הפיתול.
ניתן להציג ערכי מהירות סטנדרטיים בטבלה:

- חישוב מספר הקטבים לאורך ליבת הסטטור. משומשים נוסחאות מתמטיות, היכן נלקח בחשבון פרמטרים גיאומטרייםמוצרים:
2p = 0.35Z 1 b/h או 2p = 0.5D i/h,
כאשר 2p - מספר מוטות; Z 1 - מספר חריצים בסטטור; ב - רוחב השן, ס"מ; h - גובה משענת גב, ס"מ; D i – קוטר פנימי הנוצר משיני הליבה, ס"מ.
לאחר מכן, בהתבסס על הנתונים שהתקבלו והאינדוקציה המגנטית, יש צורך לקבוע את מספר הסיבובים, אשר נבדק מול נתוני הדרכונים של המנועים.
דרכים לשנות את מהירות המנוע
התאמת המהירות של כל מנוע חשמלי תלת פאזי המשמש במכונות וציוד הרמה והובלה מאפשרת לך להשיג את מצבי הפעולה הנדרשים בצורה מדויקת וחלקה, מה שלא תמיד אפשרי, למשל, בגלל תיבות הילוכים מכניות. בפועל, נעשה שימוש בשבע שיטות עיקריות לתיקון מהירות סיבוב, המחולקות לשני תחומי מפתח:
- שינוי במהירות השדה המגנטי בסטטור. מושגת על ידי ויסות תדר, החלפת מספר זוגות הקטבים או תיקון מתח. יש להוסיף כי שיטות אלו ישימות למנועים חשמליים עם רוטור כלוב סנאי;
- שינוי כמות ההחלקה. פרמטר זה יכול להיות מותאם על ידי שימוש במתח האספקה, חיבור התנגדות נוספת מעגל חשמלירוטור, שימוש במפל שסתומים או אספקה כפולה. משמש עבור דגמים עם רוטור פצע.
השיטות הפופולריות ביותר הן ויסות מתח ותדר (באמצעות שימוש בממירים), כמו גם שינוי מספר זוגות הקטבים (מיושם על ידי ארגון פיתול נוסף עם יכולות מיתוג).
מעגלי בקר מהירות אופייניים
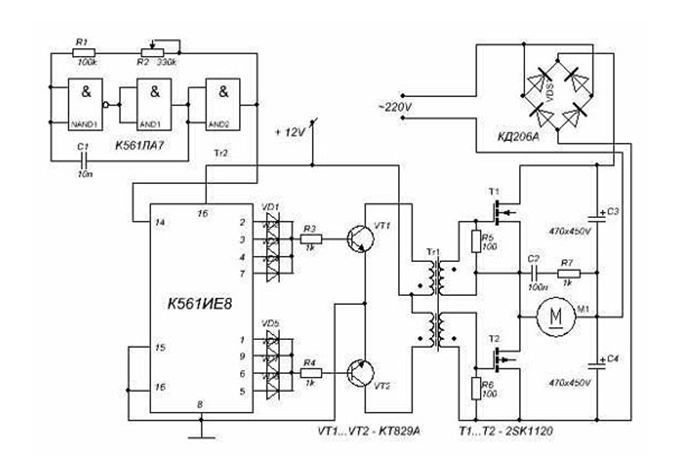
בשוק כיום ניתן לראות מבחר רחב למדי של רגולטורים ו ממירי תדריםעבור מנועים אסינכרוניים. עם זאת, לצרכים ביתיים, ניתן לחשב ציוד הרמה או עיבוד ולהרכיב אותו על מעגל מיקרו מכשיר תוצרת ביתמבוסס על תיריסטורים או טרנזיסטורים חזקים.
דוגמה למעגל של ווסת חזק מספיק עבור מנוע אסינכרוני ניתן לראות באיור למטה. הודות לכך, ניתן להשיג שליטה חלקה בפרמטרים התפעוליים שלו, להפחית את צריכת האנרגיה עד 50% ולהפחית את עלויות התחזוקה.
תכנית זו מורכבת. לצרכים ביתיים, ניתן לפשט אותו באופן משמעותי על ידי שימוש בטריאק, למשל, VT138-600, כאלמנט עבודה. במקרה זה, הדיאגרמה תיראה כך:

מהירות המנוע תהיה מווסתת על ידי פוטנציומטר, הקובע את השלב של דופק הכניסה שפותח את הטריאק.
כפי שניתן לשפוט מהמידע שהוצג לעיל, לא רק פרמטרי הפעולה שלו, אלא גם היעילות של ציוד ההרמה או העיבוד המופעל תלוי במהירות של מנוע אסינכרוני. IN רשת מסחרכיום ניתן לרכוש מגוון רחב של רגולטורים, אך ניתן גם לבצע חישובים ולהרכיב מכשיר יעיל במו ידיכם.
לפני בחירת דיאגרמת חיבור למנוע אסינכרוני חד פאזי, חשוב לקבוע אם לבצע הפוך. אם לצורך פעולה תקינה תצטרך לעיתים קרובות לשנות את כיוון הסיבוב של הרוטור, אז רצוי לארגן היפוך באמצעות תחנת לחצן. אם מספיק לך סיבוב חד כיווני, זה יסתדר ללא אפשרות המעבר. אבל מה לעשות אם, לאחר התחברות באמצעותו, תחליט שעדיין צריך לשנות את הכיוון?
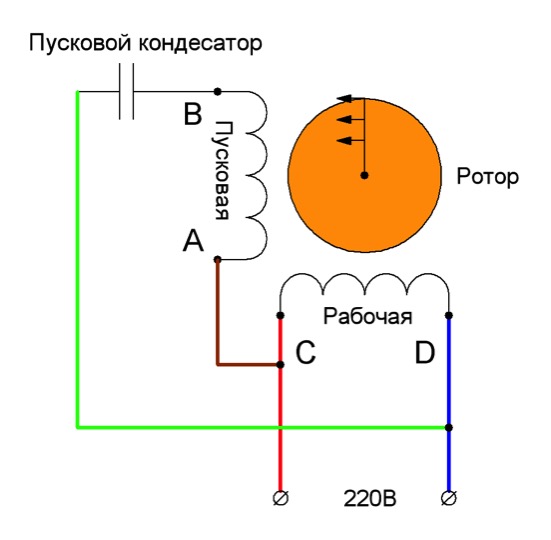
הבה נניח כי אסינכרוני מנוע חד פאזיבתחילה, סיבוב הפיר מכוון בכיוון השעון, כמו בתמונה למטה.
בואו נבהיר את הנקודות החשובות:
- נקודה א' מסמנת את ההתחלה מתחיל פיתול, ונקודה ב' היא סופו. חוט חום מחובר למסוף ההתחלה A, וחוט ירוק מחובר למסוף הסיום.
- נקודה C מסמנת את תחילת הליפוף העבודה, ונקודה D מסמנת את סופו. חוט אדום מחובר למגע הראשוני, וחוט כחול מחובר למגע הסופי.
- כיוון הסיבוב של הרוטור מצוין בחצים.
הצבנו לעצמנו את המשימה להפוך מנוע חד פאזי מבלי לפתוח את ביתו כך שהרוטור יתחיל להסתובב בכיוון השני (ב בדוגמה זונגד כיוון השעון). אפשר לפתור את זה בשלוש דרכים. בואו נסתכל עליהם מקרוב.
אפשרות 1: חיבור מחדש של הפיתול הפועל
כדי לשנות את כיוון הסיבוב של המנוע, אתה יכול להחליף רק את ההתחלה והסוף של הפיתול הפועל (פועל באופן קבוע), כפי שמוצג באיור. אולי תחשוב שכדי לעשות זאת תצטרך לפתוח את המארז, להוציא את הפיתול ולהפוך אותו. אין צורך לעשות זאת, כי זה מספיק לעבוד עם אנשי הקשר מבחוץ:
- צריכים להיות ארבעה חוטים שיוצאים מהבית. 2 מהם תואמים את התחלות פיתולי העבודה וההתחלה, ו-2 לקצוותיהם. קבע איזה זוג שייך רק לפיתול העבודה.
- תראה ששני קווים מחוברים לזוג הזה: פאזה ואפס. כשהמנוע כבוי, הפוך את השלב על ידי שינוי הפאזה ממגע המתפתל הראשוני לסופי, ואפס - מהסופי לראשוני. או להפך.

כתוצאה מכך, אנו מקבלים דיאגרמה שבה נקודות C ו-D מחליפות מקומות זו בזו. כעת הרוטור של המנוע האסינכרוני יסתובב בכיוון השני.
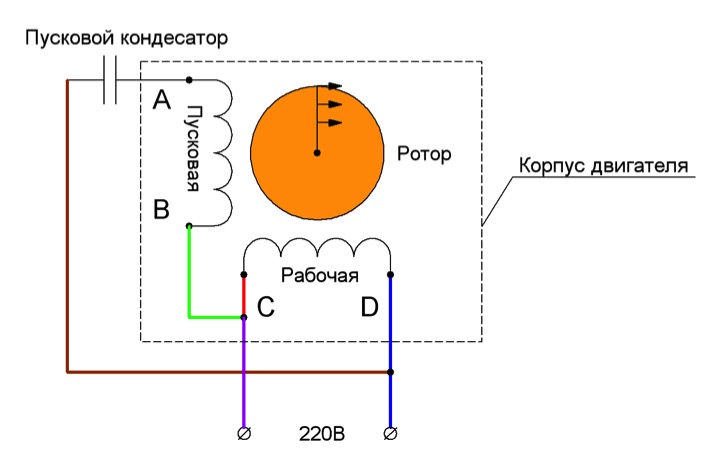
אפשרות 2: חיבור מחדש של פיתול ההתחלה
הדרך השנייה לארגן את ההפוך של מנוע אסינכרוני 220 וולט היא להחליף את ההתחלה והסוף של פיתול ההתחלה. זה נעשה באנלוגיה לאפשרות הראשונה:
- מבין ארבעת החוטים היוצאים מתיבת המנוע, גלה איזה מהם מתאים לברזי מתפתל המתנע.
- בתחילה, קצה B של פיתול ההתחלה חובר לתחילת C של פיתול העבודה, והתחלה A חוברה לקבל ההתחלה-טעינה. אתה יכול להפוך מנוע חד פאזי על ידי חיבור הקיבול למסוף B, ותחילת C לתחילת A.
לאחר הפעולות שתוארו לעיל, נקבל תרשים כמו באיור שלמעלה: נקודות A ו-B החליפו מקומות, מה שאומר שהרוטור התחיל להסתובב בכיוון ההפוך.
אפשרות 3: שינוי פיתול ההתחלה לליפוף עובד, ולהיפך
ארגן הפוך מנוע חד פאזי 220V בדרכים שתוארו לעיל אפשרי רק בתנאי שהברזים משתי הפיתולים עם כל ההתחלות והקצוות יוצאים מהבית: A, B, C ו-D. אבל יש הרבה מנועים שבהם היצרן השאיר בכוונה רק 3 מגעים בחוץ. בדרך זו, הוא הגן על המכשיר מ"מוצרים תוצרת בית" שונים. אבל בכל זאת יש מוצא.
האיור שלמעלה מציג תרשים של מנוע "בעייתי" כזה. יש לו רק שלושה חוטים שיוצאים מהבית. הם מסומנים בחום, כחול ו פרחים סגולים. הקווים הירוקים והאדומים המקבילים לסוף B של פיתול ההתחלה ותחילת C של פיתול העבודה מחוברים זה לזה. לא נוכל לגשת אליהם מבלי לפרק את המנוע. לכן, לא ניתן לשנות את סיבוב הרוטור באמצעות אחת משתי האפשרויות הראשונות.
במקרה זה, עשה זאת:
- הסר את הקבל מהמסוף A הראשוני;
- חבר אותו למסוף D הסופי;
- הברזים עשויים מחוטים A ו-D, כמו גם הפאזה (ניתן להפוך אותו באמצעות מפתח).
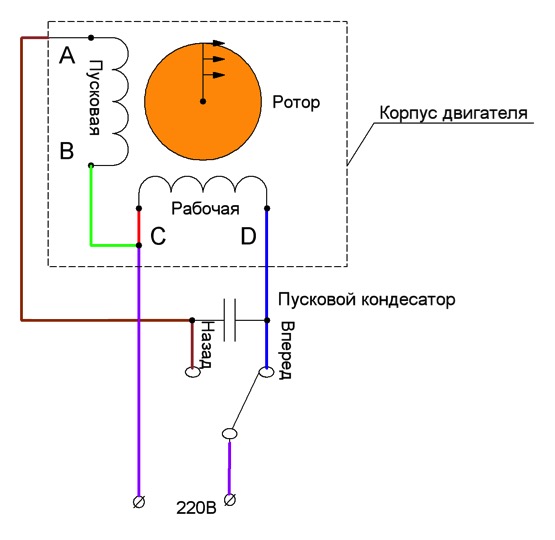
תסתכל על התמונה למעלה. כעת, אם אתה מחבר את הפאזה לברז D, הרוטור מסתובב בכיוון אחד. אם חוט פאזההעבר לענף A, ניתן לשנות את כיוון הסיבוב בכיוון ההפוך. ניתן לבצע היפוך על ידי ניתוק וחיבור ידני של החוטים. שימוש במפתח יעזור להקל על העבודה.
חָשׁוּב!אפשרות אחרונה מעגל הפוךהחיבור של המנוע החד-פאזי האסינכרוני אינו נכון. ניתן להשתמש בו רק אם מתקיימים התנאים הבאים:
- אורך פיתולי ההתחלה והעבודה זהה;
- שטח החתך שלהם מתאים זה לזה;
- חוטים אלו עשויים מאותו חומר.
כל הכמויות הללו משפיעות על ההתנגדות. זה חייב להיות קבוע בפיתולים. אם פתאום אורך או עובי החוטים שונים זה מזה, אז לאחר שתארגן את ההפך, מתברר שההתנגדות של סלילה העבודה תהפוך להיות זהה לזו שהייתה בעבר עבור הפיתול ההתחלתי, ולהיפך. זה גם עלול לגרום למנוע לא להתניע.
השדה יהיה פועם. מכיוון שניתן לשנות את סדר החלפת יציאות המהפך באופן תכנותי, קל לשנות את חילופי המתחים על הפיתולים, ולכן לשנות את כיוון הסיבוב של רוטור המנוע. באופן דומה, נמצא את ההתחלה והסוף של הפיתול השני ונציין אותם C2 ו-C5, ואת ההתחלה והסוף של השלישית - SZ ו-C6. בממוצע, על כל אחוז עלייה במתח, הנצרך כוח תגובתיגדל ב-3% או יותר (בעיקר עקב עלייה בזרם מהלך סרקמנוע), אשר בתורו מוביל להפסדים מוגברים כוח פעילבאלמנטים רשת חשמל. עם חיבור כזה, מתח ליניארייותר ממתח הפאזה פי 1.73.
שיטה זו היא ה"עתיקה ביותר", היא נובעת מהיעדר, עד לא מזמן, של ווסתי תדרים ויחסית שלהם. במחיר גבוה. מתח של 380V מופעל בין קצוות הפיתולים AB, BC, CA.
ווסת סיבוב מנוע חשמלי אסינכרוני 220V פועל כמכשיר שמשנה את מהירות הסיבוב של אימפלר המשאבה ואת לחץ המוצא (הוא מווסת כמעט את כל טווח ההספק האפשרי - לא תדרים!).
בחלק מהמנועים, הקצוות של שלבי הפיתול מובאים אל לוח המסוף. איך הפיתולים מחוברים לתצורה כזו או אחרת מוצג באיורים שלהלן.
כדי לשנות את כיוון הסיבוב של מנוע חשמלי תלת פאזי, יש צורך להחליף כל שניים משלושת הפאזות בנקודה שבה הכוח מחובר למנוע.
מנועים עם הספק מעל 1.5 קילוואט דורשים חיבור וקבל התחלה. עם זאת, טבעות קרימפ אלו אבודות. ראשית, נקבעת השייכות של החוטים לשלבים האישיים של סלילה הסטטור.
התרשים של המשגר מוצג באיור למטה.
לעתים קרובות יש צורך לחבר מנוע חשמלי תלת פאזי בחווה בת, אבל יש רק רשת חד פאזית(220 וולט).
מנועים חשמליים אסינכרוניים מגיעים בשני סוגים עיקריים: עם רוטור מפותל ועם רוטור כלוב סנאי, ההבדל ביניהם טמון בעיצובים השונים של פיתול הרוטור. זה קורה מכיוון שאנו מחברים מנוע תלת פאזי לרשת חד פאזית. הפיתול הראשוני מכיל 120 פיתולים של חוט בקוטר 0.7 מ"מ, עם ברז מהאמצע, הפיתול המשני מכיל שני פיתולים נפרדים של 60 פיתולים של אותו חוט. ערך המתח תלוי בסופו של דבר במאפייני המכונה ובקיבול של הקבלים. ידוע כי ההתנגדות של נימה קרה של מנורת ליבון קטנה פי 10 מההתנגדות של נימה חמה.
אם תפעיל את ה-IM ברשת 1-פאזית, המומנט ייווצר על ידי פיתול אחד בלבד.
במקרה זה, פיתולי המנוע מחוברים בסדרה. כאשר הנורית נדלקת, זה אומר ש-2 הטרמינלים שייכים לאותו פאזה. תגיות K1 ו- H3 (או H2) ממוקמות על המסופים הממוקמים בקשרים משותפים (קשורים במהלך החלק הראשון של העבודה) עם H1 ו- K3, בהתאמה. על מנת ליצור אותו, יש צורך להעביר את השלבים על הפיתולים באמצעות מעגל מיוחד.
נעשה שימוש בקבלים כמו KBG-MN או אחרים עם מתח הפעלה של לפחות 400 V. כאשר הגנרטור היה כבוי, היה מטען חשמלי, כך שהם היו מגודרים היטב כדי למנוע התחשמלות.
לחבר את המנוע לפי מעגל כוכב נדיר למדי בעת ההפעלה, עם העברה לאחר מכן למעגל דלתא לפעולה במצב הפעלה. המנוע מתחיל להשמיע צליל אופייני (זמזום). המנוע עובר ממתח אחד למשנהו על ידי חיבור הפיתולים. אסור להעמיס על המנוע ולעבוד "יום ולילה".
אם המנוע עדיין מזמזם לאחר מכן, יש להגדיר גם את השלב הזה כמו קודם, ולהפוך את השלב הבא - II.
החסרונות הם: מומנט מופחת ופועם של מנוע חד פאזי; חימום מוגבר; לא כל הממירים הסטנדרטיים מוכנים לעבודה כזו, כי... חלק מהיצרנים אוסרים ישירות את השימוש במוצרים שלהם במצב זה.
אם אתה משתמש בעמעום בהתאם לייעודו ותעמוד בכל תנאי השימוש, תוכל להשיג תוצאות טובותלשליטה במקורות אור בפנים ובחוץ.