אורך ומרחק מסה מדידות נפח של מוצקים בתפזורת ומזון שטח נפח ויחידות מדידה ב מתכונים קולינרייםטמפרטורה לחץ, לחץ מכני, מודול יאנג אנרגיה ועבודה כוח כוח זמן מהירות לינארית זווית מישור יעילות תרמית ויעילות דלק מספרים יחידות למדידת כמות המידע שערי חליפין מידות בגדי נשיםונעליים מידות בגדי גברים ונעליים מהירות זווית ותדירות סיבוב האצה תאוצה זוויתיתצפיפות נפח ספציפי מומנט אינרציה מומנט כוח מומנט חום בעירה סגולית (לפי מסה) צפיפות אנרגיה וחום שריפה ספציפי של דלק (בנפח) הפרש טמפרטורה מקדם התפשטות תרמית התנגדות תרמיתמוליכות תרמית חום ספציפיחשיפה לאנרגיה, כוח קרינה תרמית צפיפות זרימת חוםמקדם העברת חום זרימת נפח זרימת המוניםקצב זרימה מולארי צפיפות זרימת מסה ריכוז מולרי ריכוז מסה בתמיסה צמיגות דינמית (אבסולוטית) צמיגות קינמטית מתח פני השטח חדירות אדים חדירות אדים, קצב העברת אדים רמת קול רמת המיקרופון רגישות רמת לחץ הקול (SPL) בהירות עוצמת הארה רזולוציה ב גרפיקה ממוחשבתתדר ואורך גל כוח אופטי בדיאופטרי ו אורך מוקדכוח אופטי בדיאופטרי והגדלת עדשה (×) מטען חשמליצפיפות מטען ליניארית צפיפות פני השטחנפח טעינה צפיפות טעינה חַשְׁמַלצפיפות זרם לינארית צפיפות זרם פני השטח מתח שדה חשמליפוטנציאל ומתח אלקטרוסטטי התנגדות חשמלית ספציפית התנגדות חשמליתמוליכות חשמלית מוליכות חשמלית ספציפית השראות תיל חוט אמריקאי רמות ב-dBm (dBm או dBmW), dBV (dBV), וואט ויחידות אחרות כוח מגנטומטיבי כוח שדה מגנטי חוזק שדה מגנטי שטף מגנטי אינדוקציה ספיגה קצב המינון של קרינה מייננת רדיואקטיביות. דעיכה רדיואקטיבית קרינה. מנת חשיפה קרינה. מינון נקלט קידומות עשרוניות תקשורת נתונים טיפוגרפיה ועיבוד תמונה יחידות נפח עץ חישובי מסה מולרית טבלה מחזורית יסודות כימייםד"י מנדלייב
ערך התחלתי
ערך מומר
ניוטון מטר ניוטון סנטימטר ניוטון מילימטר קילוניוטון מטר דיין מטר דיין סנטימטר דין מילימטר קילוגרם-כוח מטר קילוגרם-כוח סנטימטר קילוגרם-כוח מילימטר גרם-כוח מטר גרם-כוח סנטימטר גרם-כוח מילימטר אונקיה-כוח רגל אונקיה-כוח אינץ' פאונד-כוח רגל אינץ' בכוח פאונד
עוד על מומנט
מידע כללי
כאשר כוח פועל על גוף בכיוון מסוים, הגוף מסתובב. נטייה זו של כוח לסובב גוף מתוארת על ידי כמות פיזיקלית - מומנט או מומנט כוח. הכוח עצמו הגורם לסיבוב או פיתול, כמו גם המרחק בין נקודת הפעלתו לנקודת הסיבוב של הגוף, משפיעים על רגע הכוח. במקרה זה, הכוח הוא כמות וקטורית, ולכן חשוב גם כיוון הכוח, כלומר, הזווית בין כיוון הכוח לקטע המחבר בין נקודת הפעלת הכוח ומרכז הסיבוב של הכוח. גוּף. אם זווית זו ישרה, כלומר, הכוח מופעל בניצב לקטע, אז מומנט הכוח הוא מקסימלי. ככל שהכוח הופך מקביל לקטע הקו, מומנט הכוח פוחת. כלומר, ככל שהזווית קרובה יותר ל-0° או 180°, כך מומנט הכוח חלש יותר, עד שהוא הופך להיות שווה לאפס כאשר כיוון הכוח מקביל לקטע. נוח לחשוב על הרגע של כוח כשילוב של המרחק שהכוח מוסר מנקודת הסיבוב והכוח שנדרש כדי לגרום לגוף להסתובב בעוצמה מסוימת.

בואו נסתכל על מערכת היחסים הזו בהמחשה. כאן הכוחות F2, F3 ו-F5 מאונכים לקטע שבין ציר הסיבוב, המיועד כְּחוֹלבמרכז ההגה, ונקודת הפעלת הכוח. רגע הכוח שהם יוצרים הוא מקסימום. מצד שני, הכוחות F1 ו-F4 מופעלים בזווית שאינה 90°, ורגע הכוח שהם יוצרים אינו מקסימלי. כלומר, רגע הכוח של שני הכוחות הללו שונה מרגע הכוח של שלושת הכוחות האחרים, אם כי עוצמתם של כל הכוחות באיור זהה.
כדי לסובב גוף בהשפעת כוח בתנאים נתונים, יש צורך ליצור רגע של כוח. מכיוון שערך זה תלוי גם במרחק וגם בכוח, כדי לקבל רגע נתון ניתן לשנות או את הכוח או את המרחק מנקודת היישום לנקודת הסיבוב. אנשים משתמשים בהתמכרות הזו במשך מאות שנים.
שימוש ברגע של כוח בחיי היומיום ובטכנולוגיה
בדרך כלל קל יותר להגדיל את המרחק בין הגוף לנקודת הפעלת הכוח מאשר את הכוח עצמו. לכן, לרוב, כאשר כוחו של אדם או חיה אינו מספיק למשימה מסוימת הכרוכה בסיבוב, משתמשים במנופים והתקנים אחרים להגדלת המרחק בין הכוח לציר הסיבוב, ובכך להגדיל את מומנט הכוח. . לדוגמה, כדי לסובב טחנה או גלגל שעליהם כורכים שרשרת להרמת גשר כבד, אנשים או בעלי חיים מסובבים מכשירים עם ידיות ארוכות או מנופים. ידיות וידיות ארוכות מאפשרות לך להגביר את הכוח המופעל. עלייה זו היא פרופורציונלית למרחק בין ציר הסיבוב של הגוף לנקודת הפעלת הכוח.

דוושות אופניים
מומנט משמש גם בדוושות אופניים. ככל שהרגל שלך רחוקה יותר ממרכז גלגל אופניים, כך נדרש פחות כוח לסובב את הגלגל באמצעות דוושה. אורך הרגליים שלנו מגביל אורך מקסימלידוושות - אם אתה עושה את הדוושות ארוכות יותר ממה שהן עכשיו באופניים מודרניים, אז הסיבוב שלהן יהיה לא נוח. למרות המגבלות הללו, דוושות הופכות את הרכיבה על אופניים להרבה יותר קלה. העיצוב של דוושות אופניים הוא כל כך נוח שאנשים מסוימים, במיוחד במדינות מתפתחות שבהן גישה הטכנולוגיה העדכנית ביותר, השתמשו בדוושות אופניים בעיצוב של מכשירים אחרים שבהם רגל או שליטה ידנית. לפעמים מותקנות דוושות כאלה על כסאות גלגלים כדי להקל על סיבוב הגלגלים באופן ידני. במקרה זה, ניתן להאריך מעט את הדוושות כדי להגביר את המומנט, אם כי הדבר עשוי להקשות מעט על השליטה בעגלה.
מפתח ברגים

מפתח ברגים משתמש במומנט כדי להפחית את הכוח הנדרש כדי להדק או לשחרר אום או בורג. מפתח ברגים נועד להיות נוח לאחיזה, אך יחד עם זאת הידית הארוכה שלו מגבירה את הכוח המופעל עליו כדי להדק או לשחרר בורג או אום. לפעמים זה מספיק מפתח קטןעם ידית קצרה, אבל במקרים מסוימים יש צורך בידית ארוכה יותר, למשל אם אנחנו מנסים לפרק אום חלוד. אם אין לך מפתח ברגים בהישג יד, אתה יכול להשתמש בצבת. הידיות הארוכות שלהם יוצרות מומנט גבוה למדי, למרות שלפעמים הן לא אוחזות באום או בהברגה מספיק חזק ועלולות להזיק לו.

הנוחות של מפתח ברגים היא שכאשר גודלו מתאים לאום, יש צורך בכוח רק כדי לסובב את המפתח, אך לא כדי להחזיק אותו על האום. צבת, לעומת זאת, צריך להחזיק סביב האום כדי למנוע ממנו להתנתק, וזה דורש כוח נוסף. זו הסיבה שבמקרים רבים מפתח ברגים חסכוני יותר מבחינת הוצאת האנרגיה. מצד שני, בחלק מהמקרים, צבת נוחה יותר - למשל ניתן להשתמש בה בזווית במקומות שקשה להגיע אליהם, בעוד מפתח ברגים עובד לרוב רק באותו מישור של האום. אם תבריג את האום בזווית, רגע הכוח יקטן, אבל זה עדיף על אי-התאפשר לשחרר אותו כלל.
כלים המיועדים לפתיחת מכסים מצנצנות משומרות פועלים באופן דומה. לרוב מדובר בגומייה המחוברת לידית כך שהרצועה יוצרת לולאה שקוטרה מתכוונן. הלולאה עצמה מקובעת למכסה ואינה משפיעה על רגע הכוח, אך הידית רק עוזרת ליצור את הרגע הרצוי. ככל שהוא גדול יותר, כך גדל רגע הכוח. הודות לו, הרבה יותר קל לפתוח את הצנצנת מאשר עם הידיים, באמצעות מגבת או חומר בעל מקדם חיכוך גבוה.
גַלגַל תְנוּפָה

דוגמה טובה למכשיר שמשתמש במומנט הוא גלגל תנופה. רגע הכוח מניע אותו, וגם עוזר להאיץ את גלגל התנופה ובזכות תנועה זו להשיג אנרגיה. גלגל התנופה מצטבר ומאחסן אותו לשימוש עתידי. אם אנרגיה זו נחוצה למטרות אחרות, אז רגע הכוח, להיפך, מאט את מהירות גלגל התנופה, ונוצרת אנרגיה, המשמשת לאחר מכן למטרה המיועדת לה. גלגלי תנופה משמשים כאשר מקור האנרגיה פועל לסירוגין, אך יש צורך באנרגיה כל הזמן. כך בדיוק משתמשים בגלגלי תנופה במנועי מכוניות, כאשר אנרגיה משתחררת ב"הבזקים" כאשר הדלק נשרף.
![]()
במקרים מסוימים, יש צורך באפקט ההפוך, כלומר, יש צורך ליישם בקצרה מספר גדול שלאנרגיה, בדרך כלל יותר ממה שמקור האנרגיה יכול להפיק בפרק זמן נתון. במצב כזה, גלגל התנופה צובר אנרגיה במנות קטנות למשך זמן מה כדי לשחרר את הכמות הנדרשת.
נדנדות ומנופים
הכוח שמפעילים שני ילדים על נדנדה בישיבה משני צידי המרכז מזיז את הנדנדה למעלה ולמטה. כלומר, במקרה זה, הנדנדה מסתובבת חלקית סביב הציר שלה. אם המשקל של שני הילדים זהה בערך, אז הם יכולים בקלות להתנדנד בנדנדה כזו. לילדים משקלים שוניםהרבה יותר קשה - הילד הכבד יותר מושך את הנדנדה מהצד שלו, ועוד יותר ילד קלאין מספיק משקל כדי להוריד את הנדנדה לצדך. זה קורה מכיוון שמשקלו של ילד כבד יותר מייצר רגע כוח גדול יותר. כדי לפתור בעיה זו, הילד הגדול צריך להתקרב למרכז במידה שמשקלו עולה על משקלו של הילד השני. לדוגמה, אם ילד גדולשלוש פעמים כבד יותר, ואז הוא צריך להתקרב שלוש פעמים, ואז הנדנדה תתאזן.
מנופים פועלים בצורה דומה: מומנט הכוח בהם משמש להפחתת הכוח הנדרש לביצוע עבודה מסוימת. בדרך כלל מנוף הוא עצם מוארך, כגון ידית או מוט, המסתובב סביב נקודה הנקראת מרכז הסיבובאו נקודת משען. מופעל כוח על נקודה נוספת על הידית, אשר עקב אורך המנוף עולה או יורדת בהתאם לעיצוב המנוף וייעודו.
מנופים מחולקים לשלושה סוגים, תלוי היכן נמצא נקודת המשען, אופן היישום כּוֹחַ, מה שהופך אותם, והיכן הוא מיושם כוח התנגדות. הם נקראים בדרך כלל מנופים מהסוג הראשון, השני והשלישי. לפעמים לא לגמרי ברור מה הקשר לכוח ההתנגדות, אבל הוא באמת קיים. זה נוגד את הכוח שנועד לסובב את הידית. כאשר הכוח המופעל גדול מכוח ההתנגדות, הידית מסתובבת. אנחנו, כמו גם בעלי חיים אחרים, משתמשים בעקרונות אלו בגוף, וחלקים בגופנו הופכים למנופים, כפי שמוצג בדוגמאות שלהלן.

מנוף מהסוג הראשוןדומה בעיצוב לאיזון התנופה של הילדים שתואר לעיל. נקודת המשען בהם נמצאת באמצע, הכוח מופעל בקצה אחד, וההתנגדות מתרחשת בקצה השני. ציר סיבוב פנימה מנוף מהסוג השניממוקם בקצה אחד של הידית, ולידו מופיעה התנגדות. הכוח מופעל על מנוף כזה בקצה השני. מנוף מהסוג השלישיהוא מתוכנן באופן דומה, אך קרוב יותר למרכז הסיבוב, הממוקם בקצה המנוף, אין התנגדות, אלא כוח המופעל על הידית. התנגדות מתרחשת בקצה השני של הידית.
מנופים מהסוג הראשון
מאזניים בעלי זרוע שווה עם כוסות הם דוגמה למנופים מהסוג הראשון. גם מספריים, רק שהם מורכבים משני מנופים המחוברים זה לזה. בעזרתם, זה הרבה יותר קל מאשר עם סכין לחתוך בזהירות כמה חומרים, כגון נייר או בד. אֵיך ארוך מהידית, ניתן לחתוך יותר חומרים עבים וקשים. מצד שני, ככל שהחומר שיש לחתוך ממוקם רחוק יותר מציר הסיבוב, כך קשה יותר לעשות זאת.

![]()
ככל שהחומר שצריך לחתוך עבה יותר, כך גדל רגע הכוח הנדרש לכך, וידיות המספריים והמספריים ארוכות יותר. חומר חזק יותר, שממנו הם עשויים. בחלק מהמקרים, נוסף קפיץ למספריים, מה שהופך אותם לנוחים יותר לשימוש. כך, למשל, זה מסודר גוזם גינה. בנוסף, למספריים מיוחדות יש תכונות אחרות. ברפואה משתמשים במספריים עם קצוות מעוגלים, קהים וחדים, בהתאם לייעודם. שלא כמו אזמל, הם נוחים יותר לעבודה ובעלי יתרון מכני על פני אזמל, אם כי גם אזמל נעשה שימוש נרחב, שכן במקרים מסוימים הוא נוח יותר ממספריים. מספריים רפואיות, המיועדות לשימוש על ידי רופאי חירום, מעוגלות בקצהן כך שניתן להשתמש בהן לחיתוך בגדים מבלי לפגוע בעור. כמה מספריים רפואיות קטנות מאוד. לדוגמה, מספריים כירורגיים עיניים יכולים להיות באורך של עד 6 ס"מ, עם להב עד 2 ס"מ, או אפילו קצר יותר.
ברז או ברזל, הנקראים גם ברזל, יכולים להיחשב גם מנוף מחלקה ראשונה, אם כי לפעמים, בהתאם לשימוש, הוא יכול להיות מנוף מחלקה שנייה או שלישית. לרוב הוא משמש להסרת ציפורניים סתומות, או להפרדה בין שני חפצים המחוברים בדבק, מסמרים, מהדקי נייר ושיטות דומות. המכתש זכה למוניטין רע ככלי לגנבים, פורצים ועבריינים אחרים, למרות שבמציאות העבריינים משתמשים בכל החומרים והכלים הזמינים כל עוד הם עוזרים להשיג את התוצאה הסופית.
דוגמה למנוף מהסוג הראשון בגוף של אנשים וכמה חיות הוא הראש. זה מאוזן על הצוואר. הצוואר הוא מרכז הסיבוב, כוח שריר מופעל בצד אחד של הראש, כוח התנגדות מופעל בצד השני. כאשר הכוח המופעל גדול מספיק, הראש נוטה לכיוון הכוח.

מנופים סוג ב'
דוגמאות למנופים מהסוג השני הן לסתות של אנשים ובעלי חיים, ומקורם של ציפורים. הם גם מפצחי אגוזים, כמו גם מפצחי אגוזים דקורטיביים. מלקחיים עשויים לרוב ממתכת, אם כי לפעמים יש מוצרים העשויים מחומרים אחרים, כמו עץ. מפצחי אגוזים הם מלקחיים מסוגננים העשויים מעץ ומעוטרים כמו בובות. בעבר, הם שימשו לייעודם, אבל עכשיו הם בעיקר קישוטים. לרוב הם עשויים בצורת חיילים, מלכים ודמויות אחרות. בארה"ב ובקנדה משתמשים לעתים קרובות בדמויות כאלה קישוט השנה החדשה. מאמינים כי החלו לייצר מפצחי אגוזים באזורים מיוערים בגרמניה. הם עדיין מיוצרים שם למכירה כמזכרות. כיום, מלקחיים רגילים משמשים לרוב לפיצוח אגוזים, ולא מפצחי אגוזים. מלקחיים אלו דומים לאלה המשמשים לפיצול טפרים של סרטנים ולובסטרים. אגב, גם ציפורני הסרטן והלובסטר עצמם הם מנופים בשורה השנייה, ופועלים על אותו עיקרון כמו מפצחי האגוזים.

מכבש השום הוא דוגמה נוספת של מנופי שורה שנייה. העיצוב שלו דומה לפצח אגוזים. הוא משמש לעתים קרובות בחיי היומיום, אם כי יש טבחים המעדיפים לקצוץ את השום דק ומאמינים שמכבש שום מקלקל את טעמו של השום. אחרים, להיפך, משתמשים רק במכבש שום, שכן טעם השום מוגבר בעת השימוש.
הרגל של אנשים וכמה חיות היא גם מנוף מהסוג השני. נקודת המשען במקרה זה נמצאת באזור האצבעות, שרירי הרגליים מפעילים כוח ליד העקב, וכוח ההתנגדות הוא המשקל שלנו. ה"מנוף" הזה מאפשר לנו לשמור על שיווי משקל וגם לעלות וליפול על בהונות.
דוגמאות נוספות למנופים מהשורה השנייה הן מריצות, בלמים לרכב ודלתות. אם תדחפו את הדלת קרוב לציר הסיבוב, לא סביר שהיא תיפתח, אבל אם תדחפו אותה הכי רחוק שאפשר מהציר הזה, אז גם דלת כבדה נכנעת בקלות. לכן הידיות עשויות בצד הנגדי למיקום הלולאות. להשתוות דלת כבדהזה היה קל לפתיחה וניתן היה להרחיב אותו.
פותחני בקבוקים הם גם מנופים סוג ב', במיוחד כאלה שאינם מחוברים לקיר, כמו בחלק מהברים והמסעדות. לחלק מהאולרים יש פותחנים קטנים; גם פותחני מחזיקי מפתחות פופולריים. אם אין לך פותחן בהישג יד, לפעמים אתה יכול להשתמש בחומרים מאולתרים, כגון סכין או מזלג. הפותחים עצמם יכולים, במקרים מסוימים, לשמש כדי לחטט מכסה דפוק על צנצנת - אם זה נעשה בהצלחה, הצנצנת תיפתח ביתר קלות. לפעמים פותחנים משמשים כמנופים מהשורה הראשונה. במקרה זה, הפותחן מאובטח למכסה בצורה שונה ולחץ מופעל מלמטה, ולא מלמעלה, כמו עם מנופים מהסוג השני.

מנופים מחלקה ג'
אם אתה מרים חפצים כבדים עם היד שלך על ידי כיפוף המרפק, אז היד שלך הופכת למנוף מהסוג השלישי. בריצה והליכה גם הרגליים הופכות למנופים. נקודת המשען של הידית במקרה זה היא במרפקים ובברכיים. אם "תושיט" את היד עם כלי, כמו מחבט בייסבול או מחבט טניס, שוב תקבל מנוף מחלקה שלישית. כדי לגרום למנוף הזה לנוע, מופעל כוח ליד מרכז הסיבוב. במקרה זה נוצרת התנגדות בקצה השני. במקרה של מחבט ומחבט, ההתנגדות היא המקום שבו הם יוצרים מגע עם הכדור. החכה היא גם מנוף מחלקה שלישית, והכוח מופעל עליה באזור שורש כף היד.
דוגמאות נוספות למנופים מהשורה השלישית הם פטיש וכלים דומים כמו אתים, מגרפות, מטאטאים ומחלפי זבובים. חלק מהמכשירים מורכבים משני מנופים הפועלים אחד כלפי השני. כך, למשל, מעוצבים פינצטה, מהדקים ומלקחיים.
דוגמא
עכשיו בואו נסתכל על דוגמה. בואו נדמיין את זה אדם פשוטבעל מבנה גוף ממוצע יכול להרים אבן במשקל 20 ק"ג. כמובן שזה לא יהיה קל, ותצטרכו לאמץ את השרירים הרבה, אבל הרמת אבן כזו אפשרית בהחלט. בצד השני, ילד קטןאני לא יכול להרים אבן כזו. אם תיתן לילד ברזל ארוך וחזק מספיק ותלמד אותו איך להשתמש בו, אז הוא יתמודד עם משימה זו, שכן הכוח הדרוש להרמת האבן יקטן בהרבה. ארכימדס אמר שהוא יכול להזיז את כדור הארץ אם יתייצב רחוק מספיק ממנו וייקח מנוף ארוך. אמירה זו מבוססת על אותו עיקרון. לאחר שנרים את האבן שלנו במשקל 20 קילוגרם באמצעות ברזל - מנוף מהסוג הראשון - נוכל להעמיס אותה על מריצה - מנוף מהסוג השני - ולקחת אותה היכן שצריך, מרימים אותה בידיות בידיים - מנופים מהסוג השלישי.
האם אתה מתקשה לתרגם יחידות מדידה משפה אחת לאחרת? עמיתים מוכנים לעזור לך. פרסם שאלה ב-TCTermsותוך מספר דקות תקבל תשובה.
§ 92. מומנט מנוע אסינכרוני
המומנט של מנוע אסינכרוני נוצר על ידי האינטראקציה של השדה המגנטי המסתובב של הסטטור עם הזרמים במוליכי סלילה הרוטור. לכן, המומנט תלוי הן בשטף המגנטי של הסטטור Φ והן בעוצמת הזרם בפיתול הרוטור אני 2. עם זאת, רק כוח פעיל, הנצרך על ידי המכונה מהרשת. כתוצאה מכך, המומנט אינו תלוי בחוזק הנוכחי בפיתול הרוטור אני 2, אבל רק מהמרכיב הפעיל שלו, כלומר. אני 2 cos φ 2, כאשר φ 2 היא זווית הפאזה בין e. ד.ש. וזרם בפיתול הרוטור.
לפיכך, המומנט של מנוע אסינכרוני נקבע על ידי הביטוי הבא:
M=CΦ אניφ 2 cos φ 2 , (122)
איפה עם- קבוע התכנון של המכונה, בהתאם למספר הקטבים והשלבים שלה, מספר הסיבובים של פיתול הסטטור, תכנון הפיתול ומערכת היחידות המאומצת.
בתנאי שהמתח המופעל קבוע ועומס המנוע משתנה, גם השטף המגנטי נשאר כמעט קבוע.
לפיכך, בביטוי למומנט, הכמויות עםו-Φ קבועים והמומנט פרופורציונלי רק לרכיב הפעיל של הזרם בפיתול הרוטור, כלומר.
M ~ אני 2 cos φ 2. (123)
שינוי העומס או מומנט הבלימה על גל המנוע, כפי שכבר ידוע, משנה הן את מהירות סיבוב הרוטור והן את ההחלקה.
שינוי בהחלקה גורם לשינוי גם בזרם ברוטור אני 2 והרכיב הפעיל שלו אני 2 cos φ 2.
ניתן לקבוע את עוצמת הזרם ברוטור לפי היחס e. ד.ש. ל התנגדות מלאה, כלומר מבוסס על חוק אוהם
איפה ז 2 , ר 2 ו איקס 2 - סה"כ, פעיל ותגובתיות של שלב סלילה הרוטור,
ה 2 - ה. ד.ש. שלבים של סלילה של הרוטור המסתובב.
שינוי ההחלקה משנה את תדירות זרם הרוטור. עם רוטור נייח ( נ 2 = 0 ו ס= 1) השדה המסתובב חוצה את המוליכים של פיתולי הסטטור והרוטור באותה מהירות ותדירות הזרם ברוטור שווה לתדירות זרם הרשת ( ו 2 = ו 1). כשההחלקה פוחתת, מתפתל הרוטור מצטלב שדה מגנטיבתדירות נמוכה יותר, וכתוצאה מכך יורדת תדירות הזרם ברוטור. כאשר הרוטור מסתובב באופן סינכרוני עם השדה ( נ 2 = נ 1 ו ס= 0), המוליכים של מתפתל הרוטור אינם נחצים על ידי השדה המגנטי, ולכן תדירות הזרם ברוטור היא אפס ( ו 2 = 0). לפיכך, תדירות הזרם בפיתול הרוטור הוא פרופורציונלי להחלקה, כלומר.
ו 2 = S f 1 .
ההתנגדות הפעילה של סלילה הרוטור כמעט בלתי תלויה בתדירות, בעוד למשל. ד.ש. והתגובה הם פרופורציונליים לתדירות, כלומר משתנים עם החלקה וניתן לקבוע אותם על ידי הביטויים הבאים:
ה 2 = S Eו איקס 2 = S X,
איפה הו איקס- אה. ד.ש. והתגובה האינדוקטיבית של שלב המתפתל עבור רוטור נייח, בהתאמה.
כך יש לנו:
ומומנט
לכן, עבור החלקות קטנות (עד כ 20%), כאשר התגובה איקס 2 = S Xקטן בהשוואה לפעיל ר 2, עלייה בהחלקה גורמת לעלייה במומנט, מכיוון שהדבר מגדיל את הרכיב הפעיל של הזרם ברוטור ( אני 2 cos φ 2). להחלקות גדולות ( S Xיותר מ ר 2) עלייה בהחלקה תגרום לירידה במומנט.
לפיכך, עם ההחלקה הגוברת (שלו ערכים גדולים) למרות שהזרם ברוטור עולה אני 2, אבל המרכיב הפעיל שלו אני 2 cos φ 2, וכתוצאה מכך, המומנט יורד עקב עלייה משמעותית בתגובת סליל הרוטור.
באיור. 115 מציג את התלות של המומנט בהחלקה. עם קצת החלקה ס M(כ-12 - 20%) המנוע מפתח מומנט מרבי, הקובע את כושר עומס היתר של המנוע והוא לרוב פי 2 - 3 מהמומנט הנקוב.

פעולה יציבה של המנוע אפשרית רק בענף העולה של עקומת החלקת המומנט, כלומר כאשר ההחלקה משתנה מ-0 ל-0 ס M. פעולת המנוע על הענף היורד של העקומה שצוינה, כלומר בעת החלקה ס > ס M, בלתי אפשרי, שכן לא מובטח כאן שיווי משקל יציב של רגעים.
אם נניח שהמומנט היה שווה למומנט הבלימה ( M vr = Mטורם) בנקודות או ב, אז אם מאזן הרגעים מופר בטעות, במקרה אחד הוא משוחזר, אבל במקרה השני הוא לא משוחזר.
נניח שמומנט המנוע ירד מסיבה כלשהי (למשל, כאשר מתח הרשת יורד), אז ההחלקה תתחיל לגדול. אם רגע שיווי המשקל היה בנקודה א, אז עלייה בהחלקה תגרום לעלייה במומנט המנוע והוא יחזור להיות שווה למומנט הבלימה, כלומר, מאזן המומנטים ישוחזר עם החלקה מוגברת. אם רגע שיווי המשקל היה בנקודה ב, אז עלייה בהחלקה תגרום לירידה במומנט, שתמיד יישאר פחות ממומנט הבלימה, כלומר, מאזן המומנטים לא ישוחזר ומהירות הרוטור תרד ברציפות עד שהמנוע יפסיק לחלוטין.
לפיכך, בנקודה אהמכונה תעבוד ביציבות, ובנקודה בפעולה יציבה בלתי אפשרית.
אם מומנט בלימה גדול מהמקסימום מופעל על ציר המנוע, איזון המומנטים לא ישוחזר ורוטור המנוע ייעצר.
המומנט של המנוע הוא פרופורציונלי לריבוע המתח המופעל, מכיוון שגם השטף המגנטי וגם הזרם ברוטור פרופורציונליים למתח. לכן, שינוי במתח הרשת גורם לשינוי במומנט.
· רגע של כוח. אורז.
רגע של כוח. אורז.
רגע של כוח,כמות המאפיינת את ההשפעה הסיבובית של כוח כאשר הוא פועל על גוף מוצק; הוא אחד המושגים הבסיסיים של המכניקה. יש מ.ס. יחסית למרכז (נקודה) ויחסית לציר.
גברת. יחסית למרכז על אודותכמות וקטורית. המודול שלו M o = Fh, איפה ו- מודול כוח, א ח- זרוע, כלומר אורך האנך שהורד מ על אודותעל קו הפעולה של הכוח (ראה. אורז. ); וקטור מכוון M oבניצב למישור העובר במרכז על אודותוכוח, לצד שממנו נראה הסיבוב שנעשה על ידי הכוח נגד כיוון השעון (במערכת הקואורדינטות הימנית). שימוש במכפלה הווקטורית של M. s. מתבטא בשוויון M o = [rF], איפה ר- וקטור רדיוס שנמשך ממנו על אודותעד כדי הפעלת כוח. מימד מ' ש. - ל 2 מ.ט. 2, יחידות מדידה - נ× מ, דין× ס"מ (1 נ× M= 10 7 דינג× ס"מ) או kgf× M.
גברת. ביחס לציר, כמות אלגברית השווה להשלכה על ציר זה של ה-MS. יחסית לכל נקודה על אודותציר או הערך המספרי של רגע ההשלכה R xyכוח ולמטוס xy, בניצב לציר ז, נלקח ביחס לנקודת החיתוך של הציר עם המישור. זה
M z = M o cos g = ± ו xy ח 1 .
סימן הפלוס בביטוי האחרון נלקח כאשר הכוח מופנה ומהקצה החיובי של הציר זגלוי נגד כיוון השעון (גם במערכת ימין). גברת. ביחס לצירים x, y, zניתן לחשב גם באמצעות הנוסחאות:
M x= yF z - zF y, M y = zF x- xF z, M z = xF y - yF x,
איפה Fx, Fy, Fz- תחזיות כוח ועל הציר; x, y, z- קואורדינטות נקודות אהפעלת כוח.
אם למערכת כוחות יש כוח כתוצאה, אז הרגע שלה מחושב באמצעות משפט ויניון.
עֲנָק- רגע של כוח (מילים נרדפות: מומנט; מומנט; מומנט) כמות פיסית, המאפיין את פעולת הסיבוב של כוח על גוף מוצק. רגע הכוח שהופעל עליו מפתח ברגיםהקשר בין וקטורי הכוח ומומנט הכוח.
סוף העבודה -
נושא זה שייך למדור:
השערה לא מוכחת ולא מופרכת נקראת בעיה פתוחה.
פיזיקה קשורה קשר הדוק למתמטיקה; המתמטיקה מספקת מנגנון שבעזרתו ניתן לנסח חוקים פיזיקליים במדויק... שיקול התיאוריה היוונית... שיטה סטנדרטיתבדיקת תיאוריות ישירה ניסוי ניסוי קריטריון אמת עם זאת, לעתים קרובות...
אם אתה צריך חומר נוסףבנושא זה, או שלא מצאת את מה שחיפשת, אנו ממליצים להשתמש בחיפוש במאגר העבודות שלנו:
מה נעשה עם החומר שהתקבל:
אם החומר הזה היה שימושי עבורך, תוכל לשמור אותו בדף שלך ברשתות חברתיות:
| צִיוּץ |
כל הנושאים בסעיף זה:
עקרון היחסות במכניקה
מערכות ייחוס אינרציאליות ועקרון היחסות. התמורות של גלילאו. אינוריאנטי טרנספורמציה. מהירויות ותאוצות מוחלטות ויחסיות. פוסטולציות של טכנולוגיה מיוחדת
כמות וקטורית
כמות וקטורית (וקטור) היא גודל פיזיקלי שיש לה שני מאפיינים - מודול וכיוון במרחב. דוגמאות כמויות וקטוריות: מהירות (
תנועה סיבובית של נקודה חומרית.
תנועה סיבובית של נקודה חומרית היא תנועה של נקודה חומרית במעגל. תנועה סיבובית היא סוג של תנועה מכנית. בְּ
קשר בין הווקטורים של מהירויות ליניאריות וזוויתיות, תאוצות ליניאריות וזוויתיות.
מידה תנועה סיבובית: זווית φ שבאמצעותה מסובב וקטור הרדיוס של נקודה במישור נורמלי לציר הסיבוב. תנועה סיבובית אחידה
מהירות ותאוצה במהלך תנועה מעוקלת.
תנועה עקמומית יותר מראה מורכבתנועה מאשר ישר, שכן גם אם התנועה מתרחשת במישור, שתי קואורדינטות המאפיינות את מיקום הגוף משתנות. מהירות ו
האצה במהלך תנועה מעוקלת.
לוקח בחשבון תנועה עקומההגוף, אנו רואים שהמהירות שלו שונה ברגעים שונים. גם במקרה בו גודל המהירות אינו משתנה, עדיין יש שינוי בכיוון המהירות
משוואת התנועה של ניוטון
(1) שבו הכוח F במקרה הכללי
מרכז המסה
מרכז האינרציה, נקודה גיאומטרית, מיקומו מאפיין את חלוקת המסות בגוף או במערכת מכנית. הקואורדינטות של המסה המרכזית נקבעות על ידי הנוסחאות
חוק התנועה של מרכז המסה.
באמצעות חוק שינוי התנע, נקבל את חוק התנועה של מרכז המסה: dP/dt = M∙dVc/dt = ΣFi מרכז המסה של המערכת נע באותו אופן כמו השתיים
עקרון היחסות של גלילאו
· מערכת התייחסות אינרציאלית מערכת הפניה אינרציאלית של גלילאו
דפורמציה פלסטית
כופפו מעט את לוח הפלדה (לדוגמה, מסור) ולאחר מכן שחררו אותה לאחר זמן מה. נראה שהמסור ישחזר לחלוטין (לפחות במבט ראשון) את צורתו. אם ניקח
כוחות חיצוניים ופנימיים
. במכניקה, כוחות חיצוניים ביחס למערכת נתונה של נקודות חומר (כלומר, קבוצה כזו של נקודות חומר שבהן התנועה של כל נקודה תלויה במיקומים או בתנועות של כל הצירים
אנרגיה קינטית
אֵנֶרְגִיָה מערכת מכנית, בהתאם למהירות התנועה של הנקודות שלו. ק.ה. T של נקודה חומרית נמדד במחצית המכפלה של המסה m של נקודה זו בריבוע מהירותה
אנרגיה קינטית.
אנרגיה קינטית היא האנרגיה של גוף נע. (מתוך מילה יווניתקינמה - תנועה). בהגדרה, האנרגיה הקינטית של משהו במנוחה במסגרת התייחסות נתונה
ערך השווה למחצית המכפלה של מסת הגוף וריבוע מהירותו.
=J. אנרגיה קינטית היא כמות יחסית, בהתאם לבחירת CO, כי מהירות הגוף תלויה בבחירת CO. זֶה.
אנרגיה קינטית של גוף מסתובב
אנרגיה קינטית היא כמות נוספת. לכן, האנרגיה הקינטית של גוף שנע באופן שרירותי שווה לסכום האנרגיות הקינטיות של כל n החומרים
עבודה וכוח במהלך סיבוב של גוף קשיח.
עבודה וכוח במהלך סיבוב של גוף קשיח. בוא נמצא ביטוי לעבודה בטמפ'
משוואה בסיסית לדינמיקה של תנועה סיבובית
לפי משוואה (5.8), החוק השני של ניוטון לתנועה סיבובית P
כוח ומומנט של מנוע חשמלי
פרק זה מוקדש למומנט: מה זה, לשם מה הוא נחוץ וכו'. כמו כן, נבחן את סוגי העומסים בהתאם לדגמי המשאבה וההתאמה בין המנוע החשמלי לעומס המשאבה.
האם ניסית פעם לסובב את הציר של משאבה ריקה ביד? כעת דמיינו לסובב אותו בזמן שהמשאבה מלאה במים. תרגישו שבמקרה זה נדרש הרבה יותר כוח ליצירת מומנט.
כעת תארו לעצמכם שעליכם לסובב את גל המשאבה במשך מספר שעות ברציפות. היית מתעייף מהר יותר אם המשאבה הייתה מלאה במים, והיית מרגיש שהשקעת הרבה יותר מאמץ באותו פרק זמן מאשר אם היית עושה את אותו הדבר עם משאבה ריקה. התצפיות שלך נכונות לחלוטין: נדרש כוח רב, שהוא מדד של עבודה (אנרגיה שהושקעה) ליחידת זמן. בדרך כלל, ההספק של מנוע חשמלי סטנדרטי מתבטא ב-kW.

מומנט (T) הוא תוצר של כוח וזרוע כוח. באירופה הוא נמדד בניוטון למטר (Nm).
כפי שניתן לראות מהנוסחה, המומנט גדל אם הכוח או המינוף גדלים - או שניהם. לדוגמה, אם נפעיל כוח של 10 N, שווה ערך ל-1 ק"ג, על פיר עם אורך מנוף (זרוע כוח) של 1 מ', המומנט המתקבל יהיה 10 ננומטר. כאשר הכוח גדל ל-20 N או 2 ק"ג, המומנט יהיה 20 ננומטר. באותו אופן, המומנט יהיה 20 ננומטר אם יוגדל הידית ל-2 מ' והכוח היה 10 ננומטר. או עם מומנט של 10 ננומטר עם זרוע כוח של 0.5 מ', הכוח צריך להיות 20 ננומטר.

עבודה וכוח
כעת נתעכב על המושג "עבודה", שבהקשר זה יש לו משמעות מיוחדת. העבודה נעשית בכל פעם שכוח - כל כוח שהוא - גורם לתנועה. עבודה שווה כוח כפול מרחק. עבור תנועה לינארית, כוח מתבטא כעבודה שנעשתה בנקודת זמן מסוימת.
אם אנחנו מדברים על סיבוב, ההספק מתבטא כמומנט (T) כפול המהירות (w).
![]()
מהירות הסיבוב של עצם נקבעת על ידי מדידת הזמן שלוקח לנקודה מסוימת על עצם מסתובב להשלים סיבוב מלא. בדרך כלל ערך זה מתבטא בסיבובים לדקה, כלומר. min-1 או סל"ד. לדוגמה, אם חפץ עושה 10 סיבובים שלמים לדקה, זה אומר שמהירות הסיבוב שלו היא: 10 דקות-1 או 10 סל"ד.

אז, מהירות הסיבוב נמדדת בסיבובים לדקה, כלומר. דקה-1.
נביא את יחידות המידה לצורה כללית.
למען הבהירות, ניקח מנועים חשמליים שונים כדי לנתח ביתר פירוט את הקשר בין כוח, מומנט ומהירות. למרות שהמומנט והמהירות של מנועים חשמליים משתנים מאוד, הם יכולים להיות בעלי אותו כוח.

לדוגמה, נניח שיש לנו מנוע 2-קוטבי (3000 סל"ד) ומנוע 4-קוטבי (1500 סל"ד). ההספק של שני המנועים החשמליים הוא 3.0 קילוואט, אך המומנטים שלהם שונים.

לפיכך, המומנט של מנוע חשמלי בעל 4 קוטבים הוא פי שניים מהמומנט של מנוע חשמלי דו-קוטבי בעל אותו הספק.
כיצד נוצרים מומנט ומהירות?
כעת, לאחר שכיסינו את היסודות של מומנט ומהירות, עלינו לבחון כיצד הם נוצרים.
במנועים חשמליים זרם חליפיןמומנט ומהירות סיבוב נוצרים כתוצאה מהאינטראקציה בין הרוטור לשדה המגנטי המסתובב. השדה המגנטי סביב פיתולי הרוטור יטו לשדה המגנטי של הסטטור. בתנאי הפעלה אמיתיים, מהירות הרוטור תמיד מפגרת מאחורי השדה המגנטי. כך, השדה המגנטי של הרוטור חוצה את השדה המגנטי של הסטטור ונשאר אחריו ויוצר מומנט. ההבדל במהירות הסיבוב של הרוטור והסטטור, הנמדד ב-%, נקרא מהירות ההחלקה.

פליטת פההוא הפרמטר העיקרי של המנוע החשמלי, המאפיין את מצב הפעולה והעומס שלו. ככל שהעומס שהמנוע החשמלי צריך להתמודד עם גדול יותר, כך ההחלקה גדולה יותר.
בהתחשב במה שנאמר לעיל, בואו נסתכל על עוד כמה נוסחאות. המומנט של מנוע אינדוקציה תלוי בחוזק השדות המגנטיים של הרוטור והסטטור, כמו גם ביחסי הפאזות בין שדות אלה. קשר זה מוצג בנוסחה הבאה:
חוזק השדה המגנטי תלוי בעיקר בעיצוב הסטטור ובחומרים מהם עשוי הסטטור. עם זאת, מתח ותדר ממלאים גם תפקיד חשוב. יחס המומנט הוא פרופורציונלי לריבוע של יחס המתח, כלומר. אם המתח המסופק יורד ב-2%, לכן המומנט יורד ב-4%.

זרם הרוטור מושרה דרך ספק הכוח אליו מחובר המנוע החשמלי, והשדה המגנטי נוצר בחלקו מהמתח. ניתן לחשב את הספק המבוא אם אנו יודעים את נתוני אספקת החשמל של המנוע, כלומר. מתח, גורם הספק, צריכת זרם ויעילות.
באירופה, כוח הציר נמדד בדרך כלל בקילווואט. בארה"ב, כוח סוס של פיר נמדד בכוח סוס (hp).
אם אתה צריך לתרגם כוח סוסבקילו-וואט, פשוט תכפיל את הערך המתאים (בכוח סוס) ב-0.746. לדוגמה, 20 כ"ס. שווה (20 0.746) = 14.92 קילוואט.
לעומת זאת, קילוואט ניתן להמיר כוח סוס על ידי הכפלת ערך קילוואט ב-1.341. המשמעות היא ש-15 קילוואט שווה ל-20.11 כ"ס.
מומנט מנוע
הספק [kW או כ"ס] מתייחס מומנט למהירות כדי לקבוע את כמות העבודה הכוללת שיש לבצע בפרק זמן נתון.
בואו נסתכל על האינטראקציה בין מומנט, כוח ומהירות, וכיצד הם קשורים מתח חשמליבאמצעות הדוגמה של המנועים החשמליים של Grundfos. למנועים חשמליים יש אותו דירוג הספק הן 50 הרץ והן 60 הרץ.

הדבר גורר הפחתה חדה במומנט ב-60 הרץ: 60 הרץ גורם לעלייה של 20% במהירות, מה שמוביל לירידה של 20% במומנט. רוב היצרנים מעדיפים לציין הספק מנוע ב-60 הרץ, כך שכאשר תדר הקו יורד ל-50 הרץ, מנועים יפיקו פחות כוח פיר ומומנט. מנועים חשמליים מספקים את אותו הספק ב-50 ו-60 הרץ.
ייצוג גרפי של המומנט של המנוע החשמלי מוצג באיור.

האיור מייצג מאפיין מומנט/מהירות טיפוסי. להלן מונחים המשמשים לתיאור המומנט של מנוע AC.
מומנט התחלה(Mp): מומנט מכני שפותח על ידי מנוע חשמלי על הציר במהלך האתחול, כלומר. כאשר זרם מועבר דרך מנוע חשמלי במתח מלא בזמן שהציר נעול.
מומנט התחלה מינימלי(ממין): מונח זה משמש להתייחסות לנקודה הנמוכה ביותר בעקומת המומנט/מהירות של מנוע חשמלי שהעומס שלו גדל למהירות מלאה. עבור רוב המנועים החשמליים של גרונדפוס, המינימום מומנט מתחיללא מצוין בנפרד, מכיוון שהנקודה הנמוכה ביותר נמצאת בנקודת הרוטור הנעול. כתוצאה מכך, עבור רוב מנועי גרונדפוס, מומנט ההתנעה המינימלי זהה למומנט ההתנעה.
מומנט נעילה(Mblock): מומנט מרבי - המומנט שמפיק מנוע AC עם מתח מדורג, מסופק בתדירות מדורגת, ללא קפיצות פתאומיות במהירות הסיבוב. זה נקרא מומנט עומס יתר האולטימטיבי או מומנט מרבי.
מומנט בעומס מלא(MP): מומנט נדרש להפקת הספק נקוב בעומס מלא.
סוגי עומס משאבה ועומס מנוע
שִׂיא הסוגים הבאיםעומסים:
כוח קבוע
המונח "הספק קבוע" משמש עבור סוגים מסוימים של עומסים הדורשים מומנט קטן יותר ככל שמהירות הסיבוב עולה, ולהיפך. עומסי כוח קבועים משמשים בדרך כלל ביישומי עיבוד מתכת כגון קידוח, גלגול וכו'.

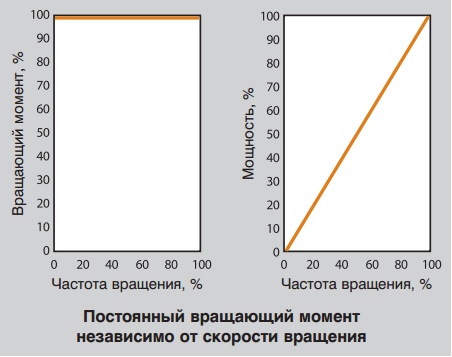
מומנט קבוע
כפי שהשם מרמז - "מומנט קבוע" - משתמע שכמות המומנט הנדרשת להפעלת מנגנון היא קבועה, ללא קשר למהירות הסיבוב. דוגמה למצב פעולה כזה היא מסועים.
מומנט והספק משתנים
"מומנט משתנה" - קטגוריה זו מעניינת אותנו ביותר. מומנט זה רלוונטי לעומסים הדורשים מומנט נמוך במהירות נמוכה ודורשים מומנט גבוה יותר ככל שהמהירות עולה. דוגמה טיפוסית היא משאבות צנטריפוגליות.
שאר חלק זה יתמקד אך ורק במומנט והספק משתנים.
לאחר שקבענו בשביל מה משאבות צנטריפוגליותמומנט משתנה אופייני, עלינו לנתח ולהעריך כמה מאפיינים של המשאבה הצנטריפוגלית. שימוש בכוננים עם תדירות משתנההסיבוב נקבע על ידי חוקים מיוחדים של הפיזיקה. במקרה הזה זה כן חוקי הדמיון , המתארים את הקשר בין הפרשי לחצים וקצבי זרימה.

ראשית, זרימת המשאבה עומדת ביחס ישר למהירות הסיבוב. המשמעות היא שאם המשאבה פועלת במהירות גבוהה יותר ב-25%, הזרימה תגדל ב-25%.
שנית, לחץ המשאבה ישתנה ביחס לריבוע השינוי במהירות הסיבוב. אם מהירות הסיבוב עולה ב-25%, הלחץ עולה ב-56%.
שלישית, מה שמעניין במיוחד הוא שהכוח הוא פרופורציונלי לקוביית השינוי במהירות הסיבוב. המשמעות היא שאם המהירות הנדרשת מופחתת ב-50%, הדבר שווה להפחתה של 87.5% בצריכת החשמל.
לסיכום, חוקי הדמיון מסבירים מדוע השימוש במנועי מהירות משתנים מתאים יותר ביישומים בהם נדרשים זרימה ולחץ משתנים. Grundfos מציעה מגוון של מנועים חשמליים עם משולבים ממיר תדרים, המווסת את מהירות הסיבוב כדי להשיג בדיוק את המטרה הזו.
בדיוק כמו הזנה, לחץ והספק, כמות המומנט הנדרשת תלויה במהירות הסיבוב.
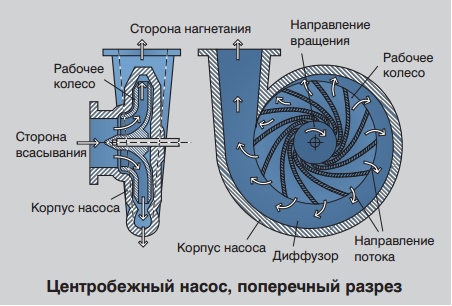
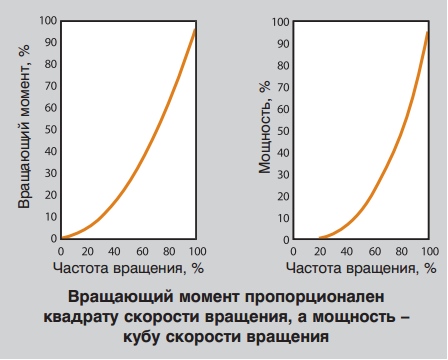
האיור מציג חתך של משאבה צנטריפוגלית. דרישות המומנט לסוג זה של עומס הן כמעט הפוכות מאלה הנדרשות ל"הספק קבוע". עבור עומסי מומנט משתנים, המומנט הנדרש במהירות נמוכה הוא קטן, והמומנט הנדרש ב- תדר גבוהסיבוב - נהדר. בביטוי מתמטי, מומנט הוא פרופורציונלי לריבוע של מהירות הסיבוב, והכוח הוא פרופורציונלי לקוביית מהירות הסיבוב.
ניתן להמחיש זאת באמצעות מאפיין המומנט/מהירות בו השתמשנו קודם כשדיברנו על מומנט מנוע:
כאשר המנוע מאיץ מאפס למהירות מדורגת, המומנט יכול להשתנות באופן משמעותי. כמות המומנט הנדרשת בעומס נתון משתנה גם היא עם המהירות. על מנת שמנוע חשמלי יתאים לעומס מסוים, יש צורך שהמומנט של המנוע החשמלי יעלה תמיד על המומנט הנדרש לעומס נתון.

בדוגמה, למשאבה הצנטריפוגלית בעומס נקוב יש מומנט של 70 ננומטר, המתאים ל-22 קילוואט במהירות מדורגת של 3000 סל"ד. במקרה זה, המשאבה דורשת מומנט של 20% בעומס נקוב בעת התנעה, כלומר. בערך 14 ננומטר. לאחר ההפעלה, המומנט יורד מעט ואז עולה לעומס מלא כשהמשאבה תופסת מהירות.
ברור שאנו זקוקים למשאבה שתספק את ערכי הזרימה/הלחץ הנדרשים (Q/H). המשמעות היא שאסור לתת למנוע החשמלי לעצור, בנוסף על המנוע החשמלי להאיץ כל הזמן עד שהוא מגיע למהירות הנקובת שלו. לכן, יש צורך שמאפיין המומנט יתאים או יעלה על מאפיין העומס בכל הטווח שבין 0% ל-100% מהירות סיבוב. כל רגע "עודף", כלומר. ההבדל בין עקומת העומס לעקומת המנוע משמש כהאצת הסיבוב.
התאמת המנוע החשמלי לעומס
אם אתה צריך לקבוע אם המומנט של מנוע מסוים עומד בדרישות העומס, אתה יכול להשוות את מאפייני המהירות/מומנט של המנוע עם מאפייני המהירות/מומנט של העומס. המומנט המיוצר על ידי המנוע חייב לעלות על המומנט הנדרש על ידי העומס, כולל תקופות של תאוצה ומהירות מלאה.
מאפייני התלות של המומנט במהירות הסיבוב של מנוע חשמלי סטנדרטי ומשאבה צנטריפוגלית.

אם נסתכל על המאפיין, נראה שכאשר מאיצים את המנוע החשמלי הוא מתחיל בזרם המקביל ל-550% מזרם העומס המלא.

ככל שהמנוע מתקרב למהירות הנקובת שלו, הזרם יורד. כצפוי, במהלך תקופת ההפעלה הראשונית הפסדים במנוע גבוהים, ולכן תקופה זו לא צריכה להיות ארוכה כדי למנוע התחממות יתר.
זה מאוד חשוב מהירות מירביתהסיבוב הושג בצורה מדויקת ככל האפשר. זה קשור לצריכת החשמל: למשל, עלייה של 1% במהירות הסיבוב מעל למקסימום הסטנדרטי מביאה לעלייה של 3% בצריכת החשמל.
צריכת החשמל היא פרופורציונלית לקוטר של אימפלר המשאבה להספק הרביעי.
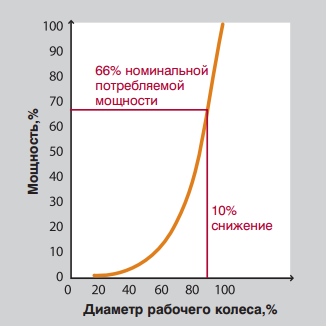
הקטנת קוטר אימפלר המשאבה ב-10% מובילה לירידה בצריכת החשמל ב- (1- (0.9 * 0.9 * 0.9 * 0.9)) * 100 = 34%, השווה ל-66% מההספק הנקוב. תלות זו נקבעת אך ורק בפועל, שכן היא תלויה בסוג המשאבה, בעיצוב האימפלר ובכמה מקטינים את קוטר האימפלר.
זמן התנעת מנוע
אם אנחנו צריכים להתאים מנוע חשמלי לעומס מסוים, למשל עבור משאבות צנטריפוגליות, המשימה העיקרית שלנו היא לספק את המומנט וההספק המתאימים בנקודת הפעולה המדורגת, מכיוון שמומנט ההתחלה עבור משאבות צנטריפוגליות הוא די נמוך. זמן ההתנעה מוגבל למדי, מכיוון שהמומנט גבוה למדי.

זה לא נדיר שלמערכות הגנה ובקרה מורכבות של מנוע לוקח קצת זמן להתניע לפני שהן יכולות למדוד את זרם ההתנעה של המנוע. זמן ההתנעה של המנוע החשמלי והמשאבה מחושב באמצעות הנוסחה הבאה:
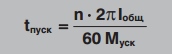
tstart = הזמן הנדרש למנוע המשאבה להגיע למהירות עומס מלאה
n = מהירות מנוע בעומס מלא
Itotal = אינרציה, הדורשת תאוצה, כלומר. אינרציה של ציר המנוע החשמלי, הרוטור, ציר המשאבה והאימפלרים.
את רגע האינרציה של משאבות ומנועים ניתן למצוא בנתונים הטכניים הרלוונטיים.
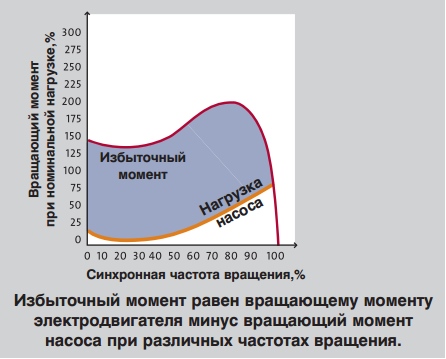
Misb = עודף מומנט מאיץ סיבוב. המומנט העודף שווה למומנט המנוע פחות מומנט המשאבה במהירויות שונות.


כפי שניתן לראות מהחישובים לעיל שבוצעו עבור הדוגמה הזועם מנוע חשמלי 4 קילוואט של משאבת CR, זמן ההתחלה הוא 0.11 שניות.
מספר התנעות המנוע בשעה
מוֹדֶרנִי מערכות מורכבותבקרות המנוע יכולות לשלוט על מספר ההתחלות בשעה עבור כל משאבה ומנוע ספציפיים. הצורך לשלוט בפרמטר זה הוא שבכל פעם שהמנוע החשמלי מופעל ואז מאיץ אותו, מציינת צריכה גבוהה זרם מתחיל. זרם ההתנעה מחמם את המנוע החשמלי. אם המנוע לא יתקרר, העומס המתמשך מזרם הכניסה יחמם באופן משמעותי את פיתולי הסטטור של המנוע, וכתוצאה מכך לכשל במנוע או לקיצור חיי הבידוד.
בדרך כלל, מספר ההתחלות שמנוע יכול לבצע בשעה הוא באחריות ספק המנוע. לדוגמה, Grundfos מציין את מספר ההתחלות המרבי לשעה בנתונים הטכניים של המשאבה, שכן מספר ההתחלות המרבי תלוי ברגע האינרציה של המשאבה.
כוח ויעילות (eta) של המנוע החשמלי
קיים קשר ישיר בין ההספק שצורך המנוע החשמלי מהרשת, הכוח על ציר המנוע החשמלי והכוח ההידראולי שפותחה על ידי המשאבה.
בייצור משאבות, נעשה שימוש בכינויים הבאים של שלושת אלה: סוגים שוניםכּוֹחַ.

קלט P1 (kW). כוח חשמלימשאבות זה הכוח שמנוע המשאבה מקבל מהמקור אספקת חשמל. כוח P! שווה להספק P2 חלקי יעילות המנוע החשמלי.
P2 (kW) כוח גל המנוע הוא ההספק שהמנוע החשמלי מעביר לפיר המשאבה.
P3 (kW) הספק מבוא המשאבה = P2, בהנחה ש צימודבין פירי המשאבה למנוע החשמלי אינו מפזר אנרגיה.
P4 (kW) הספק הידראולי של המשאבה.
עקרון הפעולה של מנוע אסינכרוני, כפי שצוין, מבוסס על האינטראקציה של שדה מסתובב והזרם המושרה על ידי שדה זה בפיתול הרוטור.
כתוצאה מאינטראקציה של השטף המגנטי Φ עם הזרם I 2 הזורם במוליכי פיתול הרוטור, נוצרים כוחות אלקטרומגנטיים הגורמים לסיבוב הרוטור.
לכן, המומנט שנוצר על ציר המנוע תלוי בערך זרם הרוטור I 2 ובשטף המגנטי Φ.
בנוסף, גודל המומנט של מנוע אסינכרוני מושפע מהיסט הפאזה Ψ 2 בין הזרם I 2 לבין ה-emf. רוטור. כדי להבין את ההשפעה של cos Ψ 2, שקול את התמונה של כוחות אלקטרומגנטיים הפועלים על מוליכים הרוטור.
הבה נבחן תחילה את המקרה כאשר השראות של פיתול הרוטור קטנה ולכן יש שינוי פאזה בין הזרם ל-emf. ניתן להזניח (איור 255, א). השדה המגנטי המסתובב של הסטטור מוחלף כאן בשדה של הקטבים N ו-S, מסתובב, נניח, בכיוון השעון. באמצעות הכלל" יד ימין", אנו קובעים את כיוון ה-emf והזרמים בפיתול הרוטור. זרמי הרוטור, באינטראקציה עם השדה המגנטי המסתובב, יוצרים מומנט. כיווני הכוחות הפועלים על מוליכים נושאי זרם נקבעים על ידי כלל "יד שמאל". כפי שניתן לראות מהציור, הרוטור בהשפעת כוחות אלקטרומגנטיים יסתובב באותו כיוון של השדה המסתובב עצמו, כלומר בכיוון השעון.
בואו ניקח בחשבון את המקרה השני, כאשר השראות של פיתול הרוטור גדול יחסית. במקרה זה, הסטת הפאזה בין זרם הרוטור I 2 לבין ה-emf. גם הרוטור יהיה משמעותי. באיור. 255, b, השדה המגנטי של הסטטור של מנוע אסינכרוני עדיין מוצג בצורה של קטבים N ו- S המסתובבים בכיוון השעון. כיוון ה-emf המושרה בפיתול הרוטור. נשאר כמו באיור. 255, a, אך עקב השהיית הפאזה של הזרם, הזרם המרבי I 2 מתרחש מאוחר יותר מה-emf המרבי.
באיור. 255 מציג את כיוון הזרמים המושרים במוליכים בודדים של הרוטור ברגע הנחשב, כמו גם את הכיוונים של כוחות אלקטרומגנטיים בודדים הפועלים על המוליכים. אם Ψ 2 = 0, אז כל הכוחות האלקטרומגנטיים יפעלו במקביל. ב-Ψ 2 גדול יותר, חלק מהכוחות האלקטרומגנטיים יוצרים מומנט המכוון בכיוון השעון, ושאר הכוחות יוצרים כיוון נגד כיוון השעון.
השטף המגנטי Φ אינו תלוי במהירות סיבוב הרוטור n. כתוצאה מכך, המומנט M פרופורציונלי רק לרכיב הפעיל של זרם הרוטור I 2 cos Ψ 2. התגובה האינדוקטיבית של הרוטור X 2 = 2πfL 2, ולכן הערך של cos Ψ 2, תלויה בתדירות זרם הרוטור f 2 ולכן, עם שינוי בעומס על ציר הרוטור, לא רק בערך של הזרם I 2 משתנה, אבל גם הערך של cos Ψ 2. לפיכך, השינוי במומנט שפותח על ידי המנוע עם שינוי במהירות הסיבוב (והחלקה) נקבע בו-זמנית הן על ידי שינוי בזרם I 2 והן על ידי שינוי ב- cos Ψ 2.
מבוסס ניתוח מתמטיומחקר ניסיוני, אפשר לבנות גרף של התלות של המומנט של מנוע אסינכרוני M בהחלקה S (איור 256). מכיוון שכל ערך של S מתאים לערך מסוים n = n 0 (1 - S), הגרף המצוין יכול להיות מיוצג גם כתלות של מומנט במהירות n. הקשר בין מומנט M והחלקה S נקרא המאפיין המכני של המנוע (איור 256).
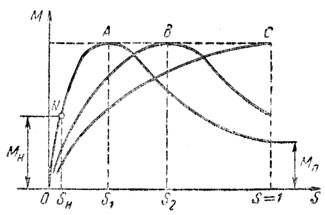
עקומה A מראה שברגע ההתנעה הראשוני, כאשר S = 1 ו-n = 0, מומנט ההתנעה של המנוע קטן יחסית. זה מוסבר על ידי העובדה שברגע ההתחלה תדירות הזרם בפיתול הרוטור הוא הגבוה ביותר והתגובה האינדוקטיבית של הפיתול גבוהה. כתוצאה מכך, ל-cos Ψ 2 יש ערך קטן (בערך 0.1-0.2). לכן, למרות זרם ההתנעה הגדול, מומנט ההתנעה יהיה הגדול ביותר. ככל שהמנוע מאיץ, ההחלקה פוחתת.
בהחלקה מסוימת S 1, הנקראת קריטית, למומנט המנוע יהיה ערך מרבי. עם ירידה נוספת בהחלקה (או, במילים אחרות, עם עלייה נוספת במהירות סיבוב המנוע), המומנט יקטן במהירות ובהחלקה S = 0 מומנט המנוע יהיה אפס. מצב זה מתאים לאידיאל לְהִתְבַּטֵל, כאשר המנוע אינו עמוס, וניתן להזניח הפסדים מכניים (חיכוך).
ניתן להגדיל את מומנט ההתחלה אם, ברגע ההפעלה, הסטת הפאזה בין הזרם ל-emf מופחתת. רוטור. אם תגדיל את ההתנגדות הפעילה של מעגל הרוטור, הזווית Ψ 2 תפחת, מה שיוביל ל-cos Ψ 2 ומומנט המנוע יגדל.
זה משמש בפועל כדי להגדיל את מומנט ההתנעה של המנוע. ברגע ההתנעה, התנגדות אקטיבית (ריאוסטט התנעה) מוכנסת למעגל הרוטור, אשר מוסרת לאחר מכן כשהמנוע מאיץ.
עלייה במומנט ההתנעה מובילה לכך שמומנט המנוע המרבי מתקבל בהחלקה גדולה יותר (נקודה S 2 של עקומה B באיור 256). על ידי הגדלת ההתנגדות הפעילה של מעגל הרוטור בעת ההפעלה, ניתן להבטיח שהמומנט המרבי יהיה ברגע ההפעלה (S = 1 עקומת C).
המומנט שפותח על ידי מנוע אסינכרוני, כפי שצוין, תלוי בגודל השטף המגנטי Φ. ככל שהמתח המופעל U 1 יורד, השטף המגנטי Φ יורד, ולכן המומנט שפותח על ידי המנוע במהירות סיבוב נתונה.
התיאוריה והפרקטיקה מראים שהמומנט של מנוע אסינכרוני הוא פרופורציונלי לריבוע המתח, ולכן אפילו ירידה קטנה במתח הרשת מלווה בירידה חדה במומנט.
עקומה A נקראת המאפיין המכאני הטבעי, ועקומות B ו-C נקראות המאפיינים המכאניים הריאוסטטיים של המנוע האסינכרוני.
פעולת המנוע בעומס נקוב תואמת לנקודה N בעקומה A.
בעת החלקת Sn, המנוע מפתח מומנט מדורג Mn.
נאמר בעבר כי על ידי הגדלת ההתנגדות הפעילה של מעגל מתפתל הרוטור, ניתן להגדיל את מומנט המנוע. ניתן יהיה לבצע את פיתול הרוטור עם התנגדות גדולה יותר, אך הדבר יגרום לחימום משמעותי של הפיתול ולירידה ביעילות. מנוע. כדי לשפר את מאפייני ההתחלה של מנועים אסינכרוניים עם רוטור כלוב סנאינעשה שימוש במנועים עם שני פיתולים של כלוב סנאי על הרוטור ומנועים עם חריץ עמוק.
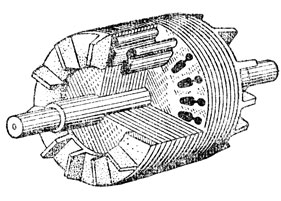
מנוע עם שני כלובים (פיתולים קצרי מעגל) הוצע על ידי דוליבו-דוברובולסקי. שני כלובים מונחים על הרוטור של מנוע כזה (איור 257): האחד הוא כלוב ההתנעה, בעל התנגדות אקטיבית גדולה ותגובת אינדוקטיבית נמוכה, והשני הוא העובד, אשר, להיפך, יש לו התנגדות פעילה נמוכה ותגובת אינדוקטיבית גדולה.

מוטות כלוב המתנע עשויים בדרך כלל מפליז. החומר של תא העבודה הוא נחושת. החתך של כלוב העבודה נעשה גדול יותר מהחתך של כלוב ההתחלה. כתוצאה מבחירת החומר וחתך התאים, ההתנגדות הפעילה של התא ההתחלתי היא פי ארבעה עד חמישה יותר התנגדותתא עובד.
כפי שניתן לראות באיור. 257, ב, בין המוטות של פיתולי ההתחלה והעבודה יש פער צר, שמידותיו קובעות את השראות של תא העבודה התחתון. הבה נבחן את פעולתו של מנוע דו-תאים.
השראות של תא העבודה גדולה יותר, מכיוון שהוא מחובר אליו מספר גדולקווים מגנטיים.
ברגע התנעת המנוע, כאשר תדירות זרמי הרוטור שווה לתדר הרשת, התגובה האינדוקטיבית של תא זה גבוהה במיוחד. בשל כך, מעבר הפאזה בין זרם תא העבודה לבין ה-emf המושרה בו יהיה גדול, והמומנט, מיוצר בתאים, - קטן. בשל ההתנגדות הפעילה הגדולה וההשראות הנמוכה של תא ההתחלה העליון, הזרם וה-emf המושרה בו יוזזו מעט בשלב, והמומנט שפיתח תא ההתחלה יהיה גדול. כתוצאה מכך, בעת התנעה, מומנט המנוע מתקבל בעיקר מכלוב ההתנעה.
ככל שמהירות המנוע עולה, תדירות זרמי הרוטור יורדת, התגובה האינדוקטיבית של התאים משפיעה פחות ופחות על פעולת המנוע, ולכן התפלגות הזרמים בתאים נקבעת רק על פי ההתנגדות הפעילה שלהם. אבל, כאמור לעיל, ההתנגדות הפעילה של התא העובד קטנה פי כמה מההתנגדות של התא ההתחלתי. לכן, מתי פעולה רגילהשל המנוע, רוב הזרם עובר דרך תא העבודה והמומנט מתקבל בעיקר בזכות תא העבודה.
באיור. 258 מציג את התלות של המומנט של מנוע עם רוטור דו-כלוב בכמות ההחלקה. בתרשים, עקומה 1 מציגה את השינוי במומנט שנוצר מתחיל פיתול, עקומה 2 - שינוי במומנט שנוצר על ידי הפיתול הפועל. הסכום של ערכי המומנט המיידיים של שתי הפיתולים נותן את עקומת המומנט M של מנוע דו-תאים.

רוטור שבו שני הכלובים מלאים באלומיניום פשוט יותר לייצור. באיור. 259 מוצג מראה חיצוניוחתך חלקי של רוטור עם כלוב אלומיניום יצוק כפול.
מנוע דו-תאים יקר ב-20-30% ממנוע אסינכרוני עם רוטור כלוב סנאי בעיצוב קונבנציונלי. המפעלים שלנו מייצרים מנועים דו-תאים מ-5 עד 2000 קילוואט.
יחד עם המנוע הדו-תאים, נעשה שימוש במנועים בעלי חריץ עמוק (איור 260). היחס בין אורך החריץ לרוחב נלקח בתוך 10-12. החלק התחתון של החריץ קשור בקווים מגנטיים יותר מאשר בחלק העליון של החריץ. כתוצאה מכך, התגובה האינדוקטיבית של החלק התחתון של החריץ גדולה יותר מהחלק העליון, במיוחד ברגע ההפעלה. זה מוביל לעקירה של זרם הרוטור לתוך חלק עליוןמוטות מתפתלים. צפיפות זרם ב שכבות עליונותהמוט עולה, וזה שווה ערך לירידה בחתך המוטות ולעלייה בהתנגדות הפעילה של הפיתול. זה ידוע כמגדיל את מומנט המנוע. בנוסף, עלייה בהתנגדות האינדוקטיבית והאקטיבית של פיתול הרוטור גורמת לירידה בזרם ההתחלה. ככל שהמהירות עולה, המנוע מקבל תכונות התואמות את העיצוב הקונבנציונלי שלו.

בשולחן 11 מציג את מאפייני ההתחלה של מנוע עם רוטור כלוב סנאי בעיצוב רגיל, מנוע דו-כלוב ומנוע עם חריץ עמוק. מאפייני ההתחלה ניתנים בצורה של היחס בין זרם ההתחלה I p ל זרם מדורג I n ובצורת היחס בין מומנט ההתחלה M n למומנט הנומינלי M n.
