В настоящее время двигатели постоянного тока нашли широкое применение в различных отраслях промышленности. Двигатели постоянного тока используются там, где требуется плавное и точное регулирование скорости и вращающего момента в широких пределах. В этой статье я расскажу о создании блока управления для двигателя постоянного тока, который позволял бы изменять частоту вращения вала двигателя и стабилизировал обороты на определенном уровне, вне зависимости от нагрузки на валу двигателя.
В основе разработки положен принцип работы следящего привода с одноконтурной системой регулирования.
Блок управления состоит из следующих узлов:
- СИФУ (Система Импульсно - Фазового Управления)
- Регулятор
- Защита
Принципиальная схема привода приведена ниже.
Крупнее
Рассмотрим схему поподробнее.
Итак, СИФУ (Система Импульсно - Фазового Управления) - преобразует синусоидальное напряжение сети в серию прямоугольных импульсов, идущих на управляющие электроды силовых тиристоров. При включении блока управления переменное напряжение величиной 14-16в поступает на мостовой выпрямитель D1, где преобразуется в пульсирующее напряжение, служащее не только для питания схемы, но и для синхронизации работы привода. Диод D2 препятствует сглаживанию импульсов конденсатором С1. Далее импульсы поступают на «детектор нуля» - DA1.1, собранного на одном ОУ микросхемы LM324, работающего в режиме компаратора. Пока нет импульса, напряжения на прямом и инверсном входах примерно равны и компаратор находиться в сбалансированном состоянии. При прохождении фазы через «0», на инверсном входе компаратора DA1.1 играющего роль «детектора нуля» появляются импульсы, переключающие компаратор, в результате чего на выходе DA1.1 вырабатываются прямоугольные синхроимпульсы, период следования которых жестко привязан к похождению фазы через «0».
Ниже представлены осциллограммы, поясняющие принцип работы. 
Сверху вниз: КТ1, КТ2, КТ3.
Схема была просимулированна в программе Multisim 11. Вот файл проекта . Можно скачать, запустить и посмотреть как работает данный узел.
Далее синхроимпульсы поступают на интегратор с транзисторным ключом (С4, Q1), где и вырабатывается пилообразное напряжение. В момент прохождения фазы через «0» синхроимпульс открывает транзистор Q1, который разряжает конденсатор С4. После спада импульса транзистор закрывается и происходит заряд конденсатора до прихода следующего синхроимпульса, в результате чего на коллекторе Q1 (осцил. КТ4). формируется линейно нарастающее пилообразное напряжение, стабилизированное генератором стабильного тока выполненного на полевом транзисторе T1. Амплитуда „пилы“ равное 9в выставляется подстроечным резистором RP1. Напряжение „пилы“ поступает на прямой вход компаратора DA1.2.
Напряжение задания поступает на инверсный вход компаратора DA1.2 и в момент, когда пилообразное напряжение превышает величину напряжения на инверсном входе компаратора, компаратор переключиться и на выходе компаратора формируется импульс (осцил. КТ4). Импульс дифференцируется через цепочку R14, C6 и поступает на базу транзистора Q2. Транзистор открывается и на импульсном трансформаторе Tr1 формируются импульсы открытия силовых тиристоров. Увеличивая (уменьшая) напряжение задания, меняется скважность импульсов в КТ5.
Вот осциллограммы. 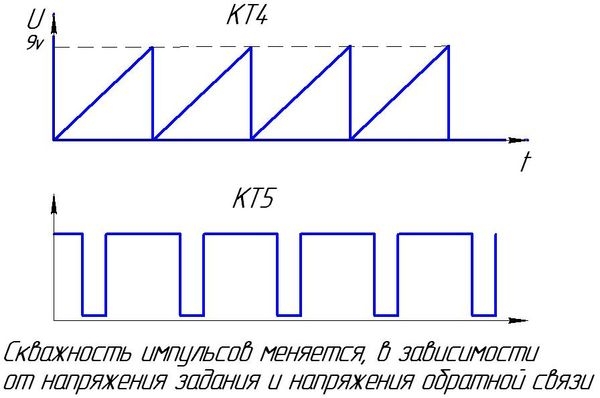
Но никаких импульсов в КТ5 мы не увидим до тех пор, пока не нажмем кнопку „Пуск“ - S1. Когда кнопка не нажата, напряжение питания +12в через нормально замкнутые контакты S1 по цепочке R12, D3 поступает на инверсный вход DA1.2 и равно около 11в. Так как это напряжение превышает напряжение „пилы“ равное 9в, компаратор запирается, и управляющие импульсы открытия тиристоров не формируются. Для предотвращения аварии и выхода из строя двигателя, в случае если оператор не вывел на «0» регулятор оборотов, в схеме предусмотрен узел разгона C5, R13 служащий для плавного разгона двигателя. В режиме «Пуск», схема работает следующим образом: при нажатии кнопки «Пуск» нормально закрытые контакты размыкаются и конденсатор С5 по цепочке - «земля», R13, - С5 начинает плавно заряжаться и напряжение на отрицательной обкладке конденсатора плавно стремиться к нулю. Одновременно, напряжение на инвертирующем входе DA1.2 плавно возрастает до величины, определяемой напряжением задания, и компаратор начинает вырабатывать управляющие импульсы силовых тиристоров. Время заряда определяется номиналами C5, R13. Если в процессе работы двигателя необходимо изменить его обороты, чтобы избежать резких бросков оборотов - в схеме предусмотрен узел «разгона - торможения» R21, C8, R22. При увеличении (уменьшении) напряжения задания, конденсатор С8 плавно заряжается (разряжается) что предотвращает резкий «наброс» напряжения на инверсном входе усилителя и как следствие предотвращает резкий бросок оборотов двигателя.
Теперь рассмотрим принцип работы регулятора оборотов
.
Регулятор предназначен для поддержания постоянных оборотов двигателя в зоне регули-рования. Регулятор представляет собой дифференциальный усилитель с суммированием двух напряжений: напряжения задания и напряжения обратной связи. Напряжение задания задается резистором RP1 и поступает через фильтр R20, C8, R21, выполняющий одновременно функции узла «разгона - торможения», поступает на инверсный вход регулятора ОУ DA1.3. При увеличении напряжения задания на выходе ОУ DA1.3 линейно уменьшается выходное напряжение.
Выходное напряжение регулятора поступает на инверсный вход компаратора СИФУ DA1.2 где, суммируясь с импульсами пилообразного напряжения, преобразуется в серию прямоугольных импульсов идущих на управляющие электроды тиристоров. При увеличении (уменьшении) напряжения задания увеличивается (уменьшается) и выходное напряжение на выходе силового блока.
На этом графике представлена зависимость оборотов двигателя от напряжения задания.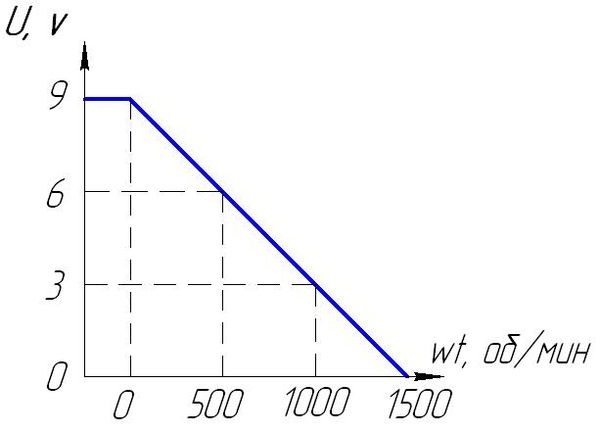
Значения оборотов двигателя даны для примера.
Делитель напряжения R22, R23 включенный на прямой вход регулятора DA1.3 служит для предотвращения аварии двигателя при обрыве обратной связи (при обрыве обратной связи двигатель идет в разнос).
При включении привода, тахогенератор начинает вырабатывать напряжение, пропорциональное оборотам двигателя. Это напряжение поступает на вход прецизионного детектора DA1.4, DA2.1 собранного по двухполупериодной схеме. Напряжение, снимаемое с выхода точного детектора DA1.4, DA2.1, поступает через фильтр C10, R30, R33 на масштабирующий усилитель обратной связи DA2.2. Усилитель служит для подгонки напряжения обратной связи поступающего с тахогенератора. Напряжение с выхода ОУ DA2.2. поступает как на вход регулятора DA1.3 так и на схему защиты DA2.3.
Резистором RP1 задаются обороты двигателя. При работе двигателя без нагрузки, напряжение на выходе масштабирующего усилителя ниже напряжения на выводе 6 ОУ DA1.3. ≈ +5v, поэтому привод работает как регулятор. При увеличении нагрузки на валу двигателя, уменьшается напряжение, получаемое с тахогенератора и как следствие уменьшение напряжения с выхода, масштабирующего усилителя.
Когда это напряжение будет меньше напряжение на выводе 5 ОУ DA1.3 привод входит в зону стабилизации тока. Уменьшение напряжения на неинвертирующем входе ОУ DA1.3 приводит к уменьшению напряжения на его выходе, а так как он работает на инвертирующий усилитель DA1.2, это приводит к большему углу открытия тиристоров и, следовательно, к увеличению напряжения на якоре двигателя.
СХЕМА ЗАЩИТЫ
Защита от превышения оборотов предназначена для защиты двигателя от аварии, в случае резкого превышения установленных оборотов двигателя. Схема собрана на ОУ DА2.3, включенного по схеме компаратора. На инверсный вход компаратора подается опорное напряжение с делителя R36, R37, RP3. Резистором RP3 устанавливается порог срабатывания защиты. Напряжение с выхода масштабирующего усилителя DA2.2 поступает на прямой вход компаратора защиты DA2.3. При превышении оборотов двигателя выше номинальных, напряжение на прямом входе компаратора превышает порог уставки защиты, определяемой RP3 - компаратор переключиться. Благодаря наличию в схеме положительной обратной связи R38 приводит к «за-щелкиванию» компаратора, а наличие диода VD12 препятствует сбросу компаратора. При срабатывании защиты, напряжение с выхода компаратора защиты (≈ +11v) через диод VD14 поступает на инверсный вход 13 DA1.2 СИФУ, а так как напряжение защиты превышает напряжение «пилы» (= 9v) - происходит мгновенный запрет выдачи управляющих импульсов на управляющие электроды тиристоров. Напряжение с выхода компаратора защиты DA2.3 открывает транзистор VT4, что приводит к срабатыванию реле Р1.1 и зажиганию светодиода VL1 сигнализирующего об аварийной ситуации. Снять защиту можно, только полностью обесточив привод, и, выдержав паузу 5 - 10 секунд вновь включив его.
Силовая часть блока управления.
Схема силовой части представлена ниже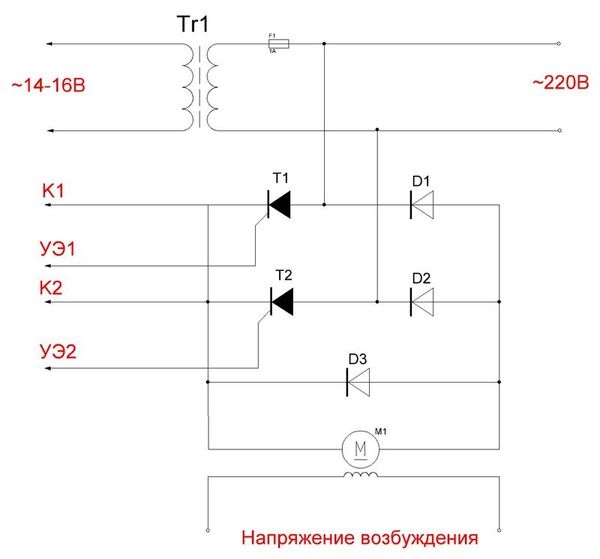
Трансформатор Tr1 предназначен для питания схемы блока управления. Управляемый выпрямитель собран по полумостовой симметричной схеме и содержит два силовых диода D1,D2
и два силовых тиристора Т1, Т2, и защитный диод D3. Обмотка возбуждения питается от своего отдельного трансформатора и выпрямителя.
Если на двигателе отсутствует тахогенератор, то обратную связь, для контроля оборотов, можно выполнить следующим образом:
1. Применить трансформатор тока, включенный в цепь питания управляемого выпрямителя
Если используется трансформатор тока, то перемычку P1 на схеме блока управления поставить
в положение 1-3, это необходимо потому, что при увеличении нагрузки ток якоря будет увеличиваться, следовательно напряжение, снимаемое с трансформатора тока тоже будет увеличиваться, поэтому напряжение обратной связи необходимо подавать на инвертирующий
вывод микросхемы DA1.3. Так же можно поставить стандартный токовый шунт, но только в цепь якоря двигателя, после выпрямителя и снимать сигнал обратной связи с него.
2. Использовать датчик якорного напряжения. Схема приведена ниже.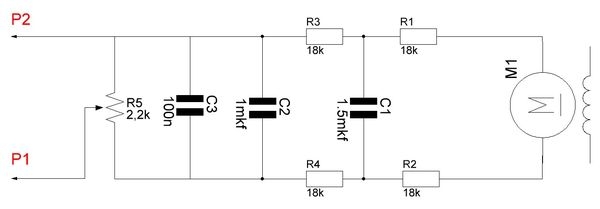
Датчик якорного напряжения представляет собой фильтр – делитель и подключается непосредственно к клеммам якоря электродвигателя. Настройка привода производиться следующим образом. Резисторы “Задание” и “Масштабирование Uoc” выставляется в среднее положение. Резистор R5 датчика якорного напряжения выводиться в нижнее к “земле” положение. Включаем привод и выставляем напряжение на якоре двигателя примерно 110 вольт. Контролируя напряжение на якоре двигателя, начинаем вращать резистор R5. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь.
Теперь перейдем к конструкции и наладке блока управления.
Блок управления был выполнен на печатной плате (файл печатной платы)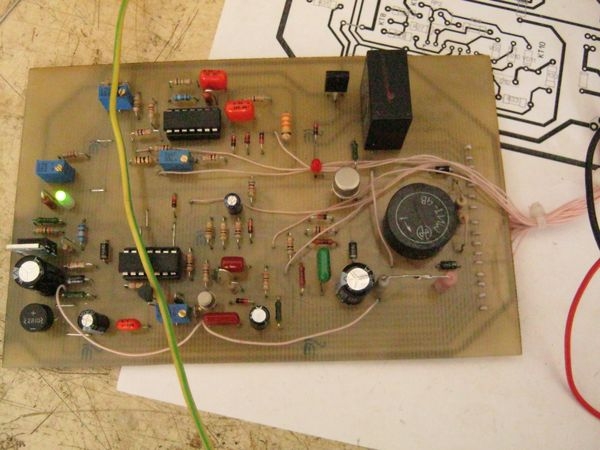

Плата проводом МГТФ соединена с разъемом, для удобства демонтажа при ремонте.
Настройка
На время настройки была собрана силовая часть навесным монтажем, в качестве нагрузки была использована обычная лампа накаливания.
Наладку начинаем с проверки напряжений питания и напряжения питания на операционных усилителях DA1, DA2. Микросхемы желательно ставить в панельки. Потом контролируем осциллограммы в контрольных точках КТ1, КТ2, КТ3 (осциллограммы в этих точках приведены в начале описания СИФУ). Теперь, осциллограф ставим в контрольную точку КТ4. Должны быть пилообразные импульсы, как на осиллограмме выше (кнопка «Пуск» в этот момент должна быть разомкнута). Подстроечным резистором RP1 необходимо выставить размах «пилы» равным 9 вольт, это очень важный момент, так как от него зависит дальнейшая работа схемы. Так как разброс параметров полевых транзисторов бывает весьма значительный, возможно диапазона регулировки RP1 может не хватить, тогда подбором номинала резистора R10 добиться нужного размаха. В контрольной точке КТ3 длительность импульса должна быть 1.5 - 1.8ms, если нет, то подбором резистора R4 (в сторону уменьшения) добиться необходимой длительности.
Вращая регулятор RR1 в контрольной точке КТ5 проконтролировать изменение скважности импульсов от максимума до полного их исчезновения при нижнем положении движка RR1. При этом должна изменятся яркость лампочки подключенной к силовому блоку.
Далее подключаем блок управления к двигателю и тахогенератору. Выставляем регулятором RR1
напряжение на якоре около 40-50 вольт. Резистор RP3 должен быть установлен в среднее положение. Контролируя напряжение на якоре двигателя, начинаем вращать резистор RP3. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь. Для желающих поэкспериментировать: для увеличения жесткости привода можно также увеличить сопротивление R24, увеличив тем самым коэффициент усиления регулятора либо увеличить резистор R32.
Если используется обратная связь по току якоря двигателя.
Для этого, как говорилось выше, необходим трансформатор тока, включенный в цепь питания
управляемого выпрямителя. Схема калибровки трансформатора тока дана ниже. Подбором резистора получить на выходе трансформатора переменное напряжение ≈ 2 ÷ 2.5v. Мощность нагрузки RN1 должна соответствовать мощности двигателя. 
Внимание! Трансформатор тока без нагрузочного резистора не включать.
Подключаем трансформатор тока к цепи обратной связи P1 и P2. На время настройки «Регулятора» желательно выпаять диод D12, чтобы исключить ложное срабатывание защиты.
Осциллограммы в контрольных точках КТ8, КТ9, КТ10 должны быть как на рисунке ниже.
Дальнейшая настройка такая же как и в случае с использования тахогенератора.
Если используется обратная связь по напряжению якоря двигателя.
Как отмечалось выше, можно применить обратную связь по якорному напряжению, для этого собирается датчик якорного напряжения. Настройка блока управления производиться следующим образом. Резисторы “Задание” и “Масштабирование Uoc” выставляется в среднее положение. Резистор R5 датчика якорного напряжения выводиться в нижнее к “земле” положение. Включаем привод и выставляем напряжение на якоре двигателя примерно 110 вольт. Контролируя напряжение на якоре двигателя, начинаем вращать резистор R5. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь.
Данный блок управления изготавливался для расточного станка. Вот фото этого монстра

На этом станке вышел из строя электромашинный усилитель, который и управлял двигателем постоянного тока перемещения стола.
Вот такой электромашинный усилитель.
Заместо него и делался данный блок управления.
Вот фото самого двигателя постоянного тока.
Блок управления был собран на изоляциоонном основани, где размещены все основные элементы.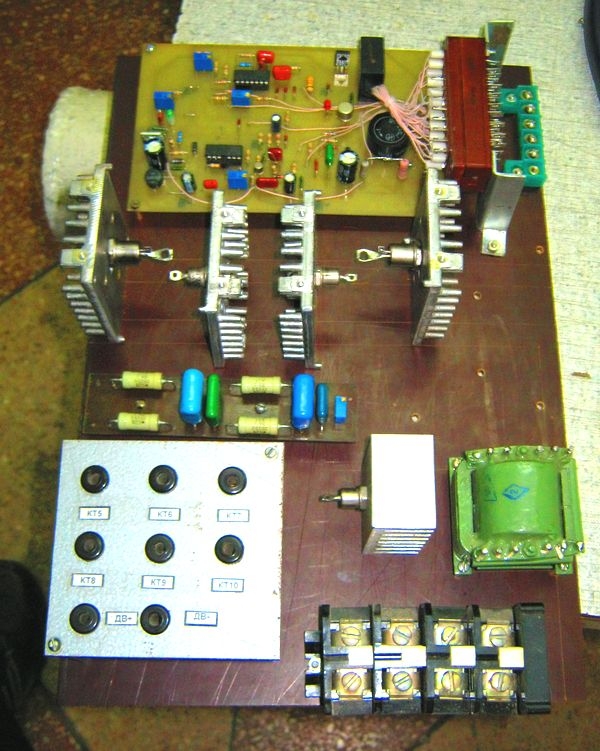
Силовые диоды и тиристоры установлены на теплоотводы. Так же была сделана панель с разъемами, куда были выведены сигналы с контрольных точек схемы. Это делалось для удобство настройки и ремонта непосредственно на станке.
Вот смонтированный блок управления в силовом шкафу станка


На другой стороне силового шкафа был установлен маленький пульт управления.
На нем расположены:
-тумблер включения блока
-тумблер режима работы. Так как для установочных перемещений стола станка, точный контроль и стабилизация оборотов не нужны, то на это время цепь обратной связи шунтируется.
-ручки регулировки количества оборотов. Было поставлено два переменных резистора, один для грубой регулировки, второй - многооборотный - для точной установки нужных оборотов при черновой и чистовой расточке детали.
Кому интересно, ниже представлено видео работы станка. Сперва, показывается расточка отверстия в стальной плите толщиной 20мм. Потом показывается с какой частотой вращается винт подачи стола станка. С этой скорость подается деталь на резец, а такую частоту вращения подающего винта обеспечивает двигатель постоянного тока, для которого, собственно, все это и делалось.
Блок управления показал себя хорошо, сбоев и аварий не было.
Там, где требуется плавное и точное регулирование скорости и вращающего момента электромотора в широких пределах, необходима схема управления двигателем постоянного тока
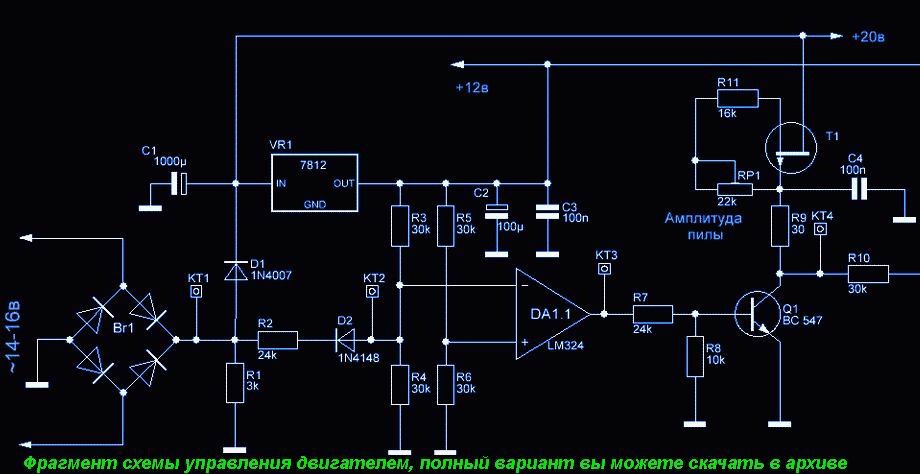
СИФУ - Система Импульсно Фазового Управления осуществляет синусоидальное преобразование напряжения сети в последовательность прямоугольных импульсов, следующих на регулирующие выводы силовых тиристоров. При включении схемы переменное напряжение номиналом 14 - 16 вольт проходит на мостовой выпрямитель и преобразуется в пульсирующее, служащее не только для питания конструкции, но и для синхронизации работы устройства. Диод D2 не дает сглаживать импульсы емкости С1. Затем импульсы следуют на «детектор нуля» выполненный на операционном усилителе LM324 элементе DA1.1, включенного в режиме компаратора. Пока импульсы отсутствуют, напряжения на прямом и инверсном входах ОУ примерно одинаковые и компаратор сбалансирован.
При прохождении синусойды через точку нуля, на инверсном входе компаратора появляются импульсы, переключающие компаратор, в результате чего на выходе DA1.1 генерируются прямоугольные синхроимпульсы, период следования которых зависит от точки нуля. Посмотрите на осциллограммы, чтоб понять принцип работы. Сверху вниз: КТ1, КТ2, КТ3.
Управление двигателем постоянного тока схема была промоделирована в программе . В архиве с полным вариантом рассматриваемой конструкции имеется файл проекта для этой программы. Можно его открыть и наглядно посмотреть как работает данный узел, а соответственно сделать окончательные выводы об управление двигателем постоянного тока, до начала сборки радиолюбительской самоделки.
Вернемся к работе - синхроимпульсы следуют на интегратор с транзисторным ключом (С4, Q1), где и генерируется пилообразное напряжение. В момент прохождения фазы через точку нуля синхроимпульс отпирает первый транзистор, который разряжает емкость С4. После спада импульса транзистор запирается и осуществляется заряд емкости до прихода следующего синхроимпульса, в результате чего на коллекторе транзистора (осциллограмма КТ4) образуется линейно нарастающее пилообразное напряжение, стабилизированное генератором стабильного тока на униполярном транзисторе T1.
Амплитуда пилообразного напряжения около 9 вольт задается подстроечным сопротивлением RP1. Это напряжение прикладывается к прямому входу компаратора DA1.2. Напряжение задания следует на инверсный вход компаратора DA1.2 и в момент времени, когда амплитуда пилообразного напряжения превышает величину напряжения на инверсном входе, компаратор перебрасывается в противоположное состояние и на его выходе генерируется импульс (осциллограмма КТ4).
Импульс дифференцируется через цепочку пассивных радиокомпонентов R14, C6 и следует на базу второго биполярного транзистора, который благодаря этому открывается и на импульсном трансформаторе образуются импульсы открытия силовых тиристоров. Увеличивая или уменьшая напряжение задания, можно регулировать скважность импульсов в КТ5.
Но никаких импульсов на осциллограмме КТ5 мы не увидим, пока не нажмем тумблер S1. Когда он не нажат, напряжение питания +12в через фронтовые контакты S1 через R12, D3 следует на инверсный вход DA1.2. Так как это напряжение выше напряжение "пилы" , компаратор закрывается, и импульсы открывающие тиристоры не генерируются.
Для предотвращения аварийных ситуаций и поломки электродвигателя, в случае если не выставлен на «0» регулятор оборотов, в схеме имеется узел разгона на элементах C5, R13 предназначенный для плавного разгона двигателя.
При нажатии тумблера S1 контакты размыкаются и емкость С5 начинает плавно заряжаться, а напряжение на отрицательной обкладке конденсатора приближается к нулю. Напряжение на инвертирующем входе DA1.2 возрастает до величины напряжения задания, и компаратор начинает генерировать импульсы для открытия силовых тиристоров. Время заряда определяется радиокомпонентами C5, R13.
Если в процессе работы двигателя понадобится отрегулировать его обороты в схему добавлен узел разгона и торможения R21, C8, R22. При увеличении или уменьшении напряжения задания, емкость С8 плавно заряжается или разряжается, что исключает резкий «наброс» напряжения на инверсном входе и как следствие исключает резкий бросок оборотов двигателя.
Регулятор применяется для поддержания постоянных оборотов в зоне регулирования. Регулятор выполнен на основе дифференциального усилителя с суммированием двух напряжений: задания и обратной связи. Напряжение задания формируется сопротивлением RP1 и следует через фильтр на компонентах R20, C8, R21, выполняющий функции узла разгона и торможения, поступает на инверсный вход DA1.3. С ростом напряжения задания на выходе DA1.3 линейно снижается выходное напряжение.
Выходное напряжение регулятора следует на инверсный вход компаратора СИФУ DA1.2 где, суммируясь с импульсами "пилы", превращается в серию прямоугольных импульсов следующих на электроды тиристоров. При увеличении или уменьшении напряжения задания увеличивается или уменьшается и выходное напряжение на выходе силового узла. На графике отображена зависимость оборотов двигателя от напряжения задания.
Делитель напряжения на резисторах R22, R23 подсоединенный на прямой вход регулятора DA1.3 предназначен для исключения аварийной ситуации при обрыве обратной связи.
При включении привода, тахогенератор генерирует напряжение, пропорциональное оборотам электромотора. Это напряжение идет на вход прецизионного детектора DA1.4, DA2.1 построенного по классической двухполупериодной схеме. С его выхода напряжение следует через фильтр на пассивных компонентах C10, R30, R33 на масштабирующий усилитель ОС DA2.2. Усилитель используется для подгонки напряжения ОС идущего с тахогенератора. Напряжение с выхода DA2.2 попадает на вход DA1.3 и на схему защиты DA2.3.
Сопротивлением RP1 генерируются обороты электродвигателя. При работе без нагрузки, напряжение на выходе масштабирующего усилителя меньше напряжения на шестом выводе DA1.3, поэтому привод работает как регулятор.
С возрастанием нагрузки на валу, снижается напряжение, снимаемое с тахогенератора и в результате снижается напряжение с выхода, масштабирующего усилителя. Когда этот уровень будет меньше чем на ноге 5 ОУ DA1.3 привод войдет в зону стабилизации тока. Снижение напряжения на неинвертирующем входе DA1.3 снизит напряжения на его выходе, а так как он работает на инвертирующий усилитель DA1.2, это увеличит угол открытия тиристоров и, следовательно, к возрастанию уровня на якоре электродвигателя.
Защита от превышения оборотов собрана на операционном усилителе DА2.3, включенного как компаратор. На его инверсный вход поступает опорное напряжение с делителя R36, R37, RP3. Сопротивлением RP3 регулируется уровень срабатывания защиты. Напряжение с выхода усилителя DA2.2 идет на прямой вход DA2.3.
При превышении оборотов выше номинальных, на прямом входе компаратора превышается порог уставки защиты, определяемой сопротивлением RP3 и компаратор переключиться.
Благодаря наличию в схеме положительной обратной связи R38 приводит к «защелкиванию» компаратора, а диод VD12 не дает сбросится компаратору. При срабатывании защиты, с выхода компаратора через диод VD14 следует на инверсный вход 13 DA1.2 СИФУ, а так как напряжение защиты выше уровня «пилы» произойдет мгновенный запрет выдачи управляющих импульсов на электроды силовых тиристоров.
Напряжение с выхода компаратора защиты DA2.3 отпирает транзистор VT4, из-за чего включается реле Р1.1 и загорается светодиод сигнализирующий об аварии. Снять защиту получится если полностью отключить привод, и, выдержав паузу в 5 - 10 секунд вновь подать на него питание.
Силовая часть блока управления представлена на рисунке ниже:
Трансформатор Tr1 используется для питания схемы блока управления. Выпрямитель собран по полумостовой схеме и включает два силовых диода D1,D2 и два силовых тиристора Т1, Т2, а также защитный диод D3. Обмотка возбуждения питается от своего отдельного трансформатора и выпрямителя. Если на двигателе нет тахогенератора, то ОС, для контроля оборотов, можно реалищовать следующим образом:

Если применяется токовый трансформатор, то перемычку P1 на схеме блока управления двигателем постоянного тока нужно установить в положение 1-3.
Еще можно применить датчик якорного напряжения:

Датчик якорного напряжения это фильтр – делитель подсоединенный непосредственно к клеммам якоря. Настройка привода осуществляется следующим образом. Сопротивления "Задание" и "Масштабирование Uoc" выкручиваются в среднее положение. Сопротивление R5 датчика якорного напряжения выкручивается на минимум. Включаем привод и выставляем напряжение на якоре около 110 вольт. Измеряя напряжение на якоре, начинаем вращать сопротивление R5. В определенный момент изменения, напряжение на якоре начнет падать, это говорит о том, что сработала ОС.
Чертеж печатной платы управления двигателем постоянного тока выполнен в программе и вы легко сможете изготовить печатную плату своими руками методом
Настройку конструкции начнем с проверки напряжений питания на ОУ DA1, DA2. Микросхемы рекомендуется устанавливать в панельки. Затем проверяем осциллограммы в контрольных точках КТ1, КТ2, КТ3. В точке КТ4. мы должны увидеть пилообразные импульсы, при разомкнутой кнопке.
Подстроечным сопротивлением RP1 выставляем размах «пилы» около 9 вольт. В контрольной точке КТ3 длительность импульса около 1.5 - 1.8ms, если мы этого не видем, то уменьшением сопротивления R4 добиваемся требуемой длительности.
Вращая рычаг RR1 в контрольной точке КТ5 контролируем изменение скважности импульсов от максимума до полного их исчезновения при минимальном сопротивлении RR1. При этом должна изменятся яркость лампочки подключенной к силовому блоку которую мы подключили в качестве нагрузки.
Затем подсоеденяем блок управления к двигателю и тахогенератору. Устанавливаем регулятором RR1 напряжение на якоре 40-50 вольт. Сопротивление RP3 должен быть в среднем положение. Измеряя напряжение на якоре двигателя, вращаем сопротивление RP3. В определенный момент настройки напряжение на якоре начнет падать, это говорит о том, что сработала обратная связь.
Если используется ОС по току якоря требуется токовый трансформатор, включенный в цепь питания выпрямителя. Схема калибровки трансформатора тока рассмотрена ниже. Подбором сопротивления получить на выходе трансформатора переменное напряжение 2 ÷ 2.5v. Мощность нагрузки RN1 должна равняться мощности двигателя
Помните, что токовый трансформатор без нагрузочного резистора включать не рекомендуется.
Подключаем трансформатор тока к цепи ОС P1 и P2. На время регулировки рекомендуется выпаять диод D12, чтобы не было ложного срабатывания защиты. Осциллограммы в контрольных точках КТ8, КТ9, КТ10 показаны на рисунке ниже.

Дальнейшая регулировка такая же как и в случае с использования тахогенератора.
Данный блок управление двигателем постоянного тока изготавливался своими рукми для расточного станка. Фотографии смотри в архиве по зеленой ссылке выше.
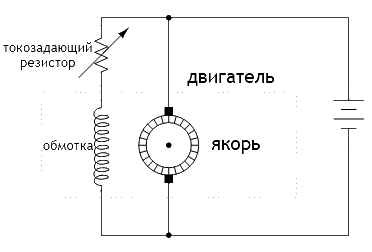
В электродвигателях постоянного тока крутящий момент порождается реакцией между двумя магнитными полями: одно поле устанавливается стационарной обмоткой возбуждения, а другое - обмотками во вращающемся якоре. У некоторых двигателей постоянного тока отсутствует обмотка возбуждения, вместо которой установлены большие постоянные магниты, сохраняющие стационарное магнитное поле постоянным при любых рабочих условиях.
В любом случае, принцип работы электродвигателя постоянного тока заключается в том, что ток, проходя через якорь, создает магнитное поле, пытающееся выровняться со стационарным полем. И поэтому якорь вращается:
Однако, коллектор (так называется набор сегментированных медных планок), разрывает электрический контакт с уже «выровненной» обмоткой и возбуждает другую обмотку (или как в простом примере, показанном выше, перевозбуждает ту же цепь в противоположном направлении), создавая другое не выровненное магнитное поле, которое продолжает вращать якорь. Электрический контакт между вращающимися сегментами коллектора и стационарным источником питания происходит через угольные щетки. Эти щетки изнашиваются через определенное время (как и сам коллектор) и поэтому требуют периодической замены.
Большинство промышленных электродвигателей постоянного тока изготавливаются с несколькими обмотками якоря, а не с одной, как показано на упрощенной иллюстрации сверху. Фотография большого (1250 л. с.) электромотора постоянного тока, используемого для приведения в движение парома, с обмотками и якорем показана здесь:

На одном щеточном узле этого электромотора крупным планом показаны обе угольные щетки, подпружиненный держатель и множество планок коллектора, с которыми контактирует щетка при вращении якоря.

В электродвигателях постоянного тока проявляются следующие отношения между механическими и электрическими величинами:
Крутящий момент:
- Момент прямо пропорционален силе магнитного поля якоря, которая, в свою очередь, прямо пропорциональна току, проходящему через обмотки якоря;
- Момент также прямо пропорционален силе постоянного магнитного поля, которое, в свою очередь, прямо пропорционально току, проходящему через возбуждающую обмотку (в двигателе без магнитов).
- Скорость ограничена ЭДС, генерируемой якорем при вращении в постоянном магнитном поле. Эта ЭДС прямо пропорциональна скорости вращения якоря, и также прямо пропорциональна силе постоянного магнитного поля (которая прямо пропорциональна току возбуждающей обмотки в электродвигателе без магнитов);
- Следовательно, скорость прямо пропорциональна напряжению якоря;
- Также скорость обратно пропорциональна силе постоянного магнитного поля, которая прямо пропорциональна току, проходящему через возбуждающие обмотки (в двигателе без магнитов).

Уменьшающееся сопротивление токозадающего резистора, позволяет большему току протекать через возбуждающую обмотку, усиливая ее магнитное поле. Это окажет два эффекта на работу двигателя: во-первых, двигатель будет производить больший момент, чем был до этого (при той же величине тока якоря), так как более сильное магнитное поле якоря будет воздействовать на якорь; во-вторых, скорость двигателя уменьшится, так как большая противо-ЭДС будет генерироваться вращающимся якорем при той же скорости вращения, и эта противо-ЭДС естественно попытается сравняться с приложенным напряжением источника постоянного тока. С другой стороны, мы можем увеличить скорость электродвигателя постоянного тока (и уменьшить выходной момент) увеличением сопротивления управляющего резистора, ослабляя стационарное магнитное поле, которое вращает якорь.
Регулированием тока обмотки можно менять баланс между скоростью и моментом, но этого недостаточно для управления общей мощностью двигателя. Чтобы управлять выходной мощностью электродвигателя постоянного тока мы также должны управлять напряжением и током якоря. Переменные резисторы можно применить и для этой задачи, но этот метод не используется в настоящее время, так как приводит к потере мощности.
Лучшим решением будет применение электронной схемы регулирования мощности на транзисторных ключах быстро отключающих и включающих якорь двигателя в цепь. Такой тип управления называется широтно-импульсной модуляцией, или ШИМ.
(отношение длительности импульса к периоду следования, обратная к скважности величина) импульса определяет долю мощности, доставляемую к двигателю:

На рисунках ошибка - не "скважность", а "коэффициент заполнения"
Такая электронная схема регулирования мощности обычно называется приводом . Таким образом, привод с регулируемой скоростью (или VSD ) - это высокомощная схема, используемая для управления скоростью двигателя постоянного тока. Моторные приводы могут быть вручную настроены на пуск двигателя с заданной скоростью, или могут принимать электронные управляющие сигналы для изменения скорости двигателя таким же образом как электронные сигналы управляют движением . Оснащенный дистанционной системой передачи управляющих сигналов, привод функционирует подобно любому другому конечному исполнительному элементу: следуя командам контроллера, стабилизирует некий технологический параметр, .
По традиционной технологии для импульсного питания двигателя постоянного тока используют схему управляемого выпрямителя , в котором для преобразования переменного тока в постоянный вместо обычных выпрямляющих диодов используют тиристоры. Основным источником питания промышленных двигателей постоянного тока остается переменный ток, и этот переменный ток должен быть преобразован в постоянный в некотором узле системы; управление имеет смысл интегрировать прямо в этот выпрямительный узел:

Схема управляемого выпрямителя работает по принципу изменения времени «пускового» импульса относительно импульсов колебаний переменного тока. Чем раньше в каждом периоде переменного тока откроется тиристор, тем дольше он будет пропускать ток к двигателю. Схема фазового управления отвечает за генерацию импульсов и их длительность.
Привод постоянного тока просто регулирующий мощность, поступающую к двигателю, был бы непродуманным и трудно применимым для управления большинством процессов. Чего бы в идеале хотелось от регулируемого привода, так это точного управления скоростью двигателя. По этой причине большинство приводов рассчитано на получение обратной связи от тахометра, механически соединенного с валом мотора. Тахометр обычно представляет собой небольшой генератор, создающий постоянное напряжение, прямо пропорциональное скорости вращения вала (с выходом 0-10 В). По его показаниям регулируемый привод дросселирует электрическую мощность, подводимую к двигателю так, чтобы скорость вращения совпала с заданной управляющим сигналом. Имея встроенный контур обратной связи для регулирования скорости, регулируемый привод становится «ведомым контроллером» в системе управления. Привод может принимать выходной сигнал уставки скорости от
Владимир Рентюк, Запорожье, Украина
В статье дается краткий обзор и анализ популярных схем, предназначенных для управления коллекторными двигателями постоянного тока, а также предлагаются оригинальные и малоизвестные схемотехнические решения
Электродвигатели являются, наверное, одним из самых массовых изделий электротехники. Как говорит нам всезнающая Википедия, электрический двигатель - электрическая машина (электромеханический преобразователь), в которой электрическая энергия преобразуется в механическую. Началом его истории можно считать открытие, которое сделал Майкл Фарадей в далеком 1821 году, установив возможность вращения проводника в магнитном поле. Но первый более-менее практический электродвигатель с вращающимся ротором ждал своего изобретения до 1834 года. Его во время работы в Кёнигсберге изобрел Мориц Герман фон Якоби, более известный у нас как Борис Семенович. Электродвигатели характеризуют два основных параметра - это скорость вращения вала (ротора) и момент вращения, развиваемый на валу. В общем плане оба этих параметра зависят от напряжения, подаваемого на двигатель и тока в его обмотках. В настоящее время имеется достаточно много разновидностей электродвигателей, и поскольку, как заметил наш известный литературный персонаж Козьма Прутков, нельзя объять необъятное, остановимся на рассмотрении особенностей управления двигателями постоянного тока (далее электродвигателями).
К двигателям постоянного тока относятся два типа - это привычные для нас коллекторные двигатели и бесколлекторные (шаговые) двигатели. В первых переменное магнитное поле, обеспечивающее вращение вала двигателя, образуется обмотками ротора, которые запитываются через щеточный коммутатор - коллектор. Оно и взаимодействует с постоянным магнитным полем статора, вращая ротор. Для работы таких двигателей внешние коммутаторы не требуются, их роль выполняет коллектор. Статор может быть изготовлен как из системы постоянных магнитов, так и из электромагнитов. Во втором типе электродвигателей обмотки образуют неподвижную часть двигателя (статор), а ротор сделан из постоянных магнитов. Здесь переменное магнитное поле образуется путем коммутации обмоток статора, которая выполняется внешней управляющей схемой. Шаговые двигатели («stepper motor» в английском написании) значительно дороже коллекторных. Это достаточно сложные устройства со своими специфическими особенностями. Их полное описание требует отдельной публикации и выходит за рамки данной статьи. Для получения более полной информации по двигателям этого типа и их схемам управления можно обратиться, например, к .
Коллекторные двигатели (Рисунок 1) более дешевы и, как правило, не требуют сложных систем управления. Для их функционирования достаточно подачи напряжения питания (выпрямленного, постоянного!). Проблемы начинают возникать, когда появляется необходимость в регулировке скорости вращения вала такого двигателя или в специальном режиме управления моментом вращения. Основных недостатков таких двигателей три - это малый момент на низких скоростях вращения (поэтому часто требуется редуктор, а это отражается на стоимости конструкции в целом), генерация высокого уровня электромагнитных и радиопомех (из-за скользящего контакта в коллекторе) и низкая надежность (точнее малый ресурс; причина в том же коллекторе). При использовании коллекторных двигателей необходимо учитывать, что ток потребления и скорость вращения их ротора зависят от нагрузки на валу. Коллекторные двигатели более универсальны и имеют более широкое распространение, особенно в недорогих устройствах, где определяющим фактором является цена.
Поскольку скорость вращения ротора коллекторного двигателя зависит, в первую очередь, от подаваемого на двигатель напряжения, то естественным является использование для его управления схем, имеющих возможность установки или регулировки выходного напряжения. Такими решениями, которые можно найти в Интернете, являются схемы на основе регулируемых стабилизаторов напряжения и, поскольку век дискретных стабилизаторов давно прошел, для этого целесообразно использовать недорогие интегральные компенсационные стабилизаторы, например, . Возможные варианты такой схемы представлены на Рисунке 2.
Схема примитивная, но кажется очень удачной и, главное, недорогой. Посмотрим на нее с точки зрения инженера. Во-первых, можно ли ограничить момент вращения или ток двигателя? Это решается установкой дополнительного резистора. На Рисунке 2 он обозначен как R LIM . Его расчет имеется в спецификации, но он ухудшает характеристику схемы как стабилизатора напряжения (об этом будет ниже). Во-вторых, какой из вариантов управления скоростью лучше? Вариант на Рисунке 2а дает удобную линейную характеристику регулирования, поэтому он и более популярен. Вариант на Рисунке 2б имеет нелинейную характеристику. Но в первом случае при нарушении контакта в переменном резисторе мы получаем максимальную скорость, а во втором - минимальную. Что выбрать - зависит от конкретного применения. Теперь рассмотрим один пример для двигателя с типовыми параметрами: рабочее напряжение 12 В; максимальный рабочий ток 1 А. ИМС LM317, в зависимости от суффиксов, имеет максимальный выходной ток от 0.5 А до 1.5 А (см. спецификацию ; имеются аналогичные ИМС и с бóльшим током) и развитую защиту (от перегрузки и перегрева). С этой точки зрения для нашей задачи она подходит идеально. Проблемы скрываются, как всегда, в мелочах. Если двигатель будет выведен на максимальную мощность, что для нашего применения весьма реально, то на ИМС, даже при минимально допустимой разнице между входным напряжением V IN и выходным V OUT , равной 3 В, будет рассеиваться мощность не менее
P = (V IN - V OUT)×I = 3×1 = 3 Вт.
Таким образом, нужен радиатор. Опять вопрос - на какую рассеиваемую мощность? На 3 Вт? А вот и нет. Если не полениться и рассчитать график нагрузки ИМС в зависимости от выходного напряжения (это легко выполнить в Excel), то мы получаем, что при наших условиях максимальная мощность на ИМС будет рассеиваться не при максимальном выходном напряжении регулятора, а при выходном напряжении равном 7.5 В (см. Рисунок 3), и она составит почти 5.0 Вт!
Как видим, получается что-то уже не дешевое, но очень громоздкое. Так что такой подход годится только для маломощных двигателей с рабочим током не более 0.25 А. В этом случае мощность на регулирующей ИМС будет на уровне 1.2 Вт, что уже будет приемлемо.
Выход из положения - использовать для управления метод широтно-импульсной модуляции (ШИМ). Он, действительно, самый распространенный. Его суть - подача на двигатель промодулированных по длительности однополярных прямоугольных импульсов. Согласно теории сигналов, в структуре такой последовательности имеется постоянная составляющая, пропорциональная отношению τ/T, где: τ - длительность импульса, а T - период последовательности. Вот она-то и управляет скоростью двигателя, который выделяет ее как интегратор в этой системе. Поскольку выходной каскад регулятора на основе ШИМ работает в ключевом режиме он, как правило, не нуждается в больших радиаторах для отвода тепла, даже при относительно больших мощностях двигателя, и КПД такого регулятора несравненно выше предыдущего. В ряде случаев можно использовать понижающие или повышающие DC/DC-преобразователи, но они имеют ряд ограничений, например, по глубине регулировки выходного напряжения и минимальной нагрузке. Поэтому, как правило, чаще встречаются иные решения. «Классическое» схемное решение такого регулятора представлено на Рисунке 4 . Оно использовано в качестве дросселя (регулятора) в профессиональной модели железной дороги.
На первом операционном усилителе собран генератор, на втором компаратор. На вход компаратора подается сигнал с конденсатора C1, а путем регулирования порога срабатывания формируется уже сигнал прямоугольной формы с нужным отношением τ/T (Рисунок 5).
Диапазон регулировки устанавливается подстроечными резисторами RV1 (быстрее) и RV3 (медленнее), а сама регулировка скорости осуществляется резистором RV2 (скорость). Обращаю внимание читателей, что в Интернете на русскоязычных форумах гуляет похожая схема с ошибками в номиналах делителя, задающего порог компаратора. Управление непосредственно двигателем осуществляется через ключ на мощном полевом транзисторе типа . Особенности этого транзистора типа MOSFET - большой рабочий ток (30 А постоянного, и до 120 А импульсного), сверхмалое сопротивление открытого канала (40 мОм) и, следовательно, минимальная мощность потерь в открытом состоянии.
На что нужно в первую очередь обращать внимание при использовании таких схем? Во-первых, это исполнение цепи управления. Здесь в схеме (Рисунок 4) есть небольшая недоработка. Если со временем возникнут проблемы с подвижным контактом переменного резистора, мы получим полный почти мгновенный разгон двигателя. Это может вывести из строя наше устройство. Какое противоядие? Установить добавочный достаточно высокоомный резистор, например, 300 кОм с вывода 5 ИМС на общий провод. В этом случае при отказе регулятора двигатель будет остановлен.
Еще одна проблема таких регуляторов - это выходной каскад или драйвер двигателя. В подобных схемах он может быть выполнен как на полевых транзисторах, так и на биполярных; последние несравненно дешевле. Но и в первом и во втором варианте необходимо учитывать некоторые важные моменты. Для управления полевым транзистором типа MOSFET нужно обеспечить заряд и разряд его входной емкости, а она может составлять тысячи пикофарад. Если не использовать последовательный с затвором резистор (R6 на Рисунке 4) или его номинал будет слишком мал, то на относительно высоких частотах управления операционный усилитель может выйти из строя. Если же использовать R6 большого номинала, то транзистор будет дольше находиться в активной зоне своей передаточной характеристики и, следовательно, имеем рост потерь и нагрев ключа.
Еще одно замечание к схеме на Рисунке 4. Использование дополнительного диода D2 лишено смысла, так как в структуре транзистора BUZ11 уже имеется свой внутренний защитный быстродействующий диод с лучшими характеристиками, чем предлагаемый. Диод D1 также явно лишний, транзистор BUZ11 допускает подачу напряжения затвор-исток ± 20 В, да и переполюсовка в цепи управления при однополярном питании, как и напряжение выше 12 В, невозможны.
Если использовать биполярный транзистор, то возникает проблема формирования достаточного по величине базового тока. Как известно, для насыщения ключа на биполярном транзисторе ток его базы должен быть, по крайней мере, не менее 0.06 от тока нагрузки. Понятно, что операционный усилитель такой ток может не обеспечить. С этой целью в аналогичном, по сути, регуляторе, который используется, например, в популярном мини-гравере PT-5201 компании , применен транзистор , представляющий собой схему Дарлингтона. Тут интересный момент. Эти мини-граверы иногда выходят из строя, но не из-за перегрева транзистора, как можно было бы предположить, а из-за перегрева ИМС (максимальная рабочая температура +70 °С) выходным транзистором (максимально допустимая температура +150 °С). В изделиях, которыми пользовался автор статьи, он был вплотную прижат к корпусу ИМС и посажен на клей, что недопустимо нагревало ИМС и почти блокировало теплоотвод. Если вам попалась такое исполнение, то лучше «отклеить» транзистор от ИМС и максимально отогнуть. За это know-how автор статьи был премирован компанией Pro’sKit набором инструментов. Как видите все нужно решать в комплексе - смотреть не только на схемотехнику, но и внимательно относится к конструкции регулятора в целом.
Есть еще несколько интересных схем более простых ШИМ-регуляторов. Например, две схемы на одиночном операционном усилителе с драйвером опубликованы в [