Trenutno motori jednosmerna struja pronađeno široka primena u raznim industrijama. DC motori se koriste tamo gdje je potrebna glatka i precizna kontrola brzine i momenta u širokom rasponu. U ovom članku govorit ću o stvaranju upravljačke jedinice za DC motor koja bi omogućila promjenu brzine osovine motora i stabilizirala brzinu na određenom nivou, bez obzira na opterećenje na osovini motora.
Razvoj se zasniva na principu rada servo pogona sa jednokružnim upravljačkim sistemom.
Upravljačka jedinica se sastoji od sljedećih komponenti:
- SIFU (Pulse-Phase Control System)
- Regulator
- Zaštita
Šematski dijagram pogona je prikazan ispod.
Veći
Pogledajmo pobliže dijagram.
Dakle, SIFU (Pulse-Phase Control System) - pretvara sinusoidni mrežni napon u niz pravokutnih impulsa koji idu na kontrolne elektrode energetskih tiristora. Prilikom uključivanja upravljačke jedinice AC napon 14-16V se dovodi do mosnog ispravljača D1, gdje se pretvara u pulsirajući napon, koji služi ne samo za napajanje strujnog kola, već i za sinhronizaciju rada pogona. Dioda D2 sprečava izglađivanje impulsa kondenzatorom C1. Zatim impulsi stižu do „detektora nule“ - DA1.1, sastavljenog na jednom op-pojačalu LM324 čipa, koji radi u komparatorskom režimu. Dok nema impulsa, naponi na direktnom i inverznom ulazu su približno jednaki i komparator je u balansiranom stanju. Kada faza prođe kroz "0", na inverznom ulazu komparatora DA1.1 pojavljuju se impulsi, koji igra ulogu "nula detektora", prebacujući komparator, zbog čega se na izlazu generiraju pravokutni sinhronizacijski impulsi. od DA1.1, čiji je period ponavljanja strogo vezan za fazni prijelaz kroz “0” “
Ispod su oscilogrami koji objašnjavaju princip rada. 
Od vrha do dna: KT1, KT2, KT3.
Kolo je simulirano u Multisim 11. Ovdje je projektni fajl. Možete preuzeti, pokrenuti i vidjeti kako ovaj čvor radi.
Zatim se taktni impulsi šalju u integrator sa tranzistorskim prekidačem (C4, Q1), gdje se generira pilasti napon. U trenutku kada faza prođe kroz "0", taktni impuls otvara tranzistor Q1, koji prazni kondenzator C4. Nakon raspada impulsa, tranzistor se zatvara i kondenzator se puni dok ne stigne sljedeći takt impuls, što rezultira Q1 na kolektoru (oscilator KT4). formira se linearno rastući pilasti napon, stabilizovan generatorom stabilne struje napravljenim na tranzistoru sa efektom polja T1. Amplituda "pile" jednaka 9V postavlja se rezistorom RP1. Napon “pile” se dovodi na direktni ulaz komparatora DA1.2.
Referentni napon se dovodi na inverzni ulaz komparatora DA1.2 i u trenutku kada pilasti napon pređe napon na inverznom ulazu komparatora, komparator se prebacuje i na izlazu komparatora se formira impuls (oscilacija KT4). Impuls se diferencira kroz lanac R14, C6 i ide do baze tranzistora Q2. Tranzistor se otvara i impulsni transformator Tr1 stvara impulse otvaranja za energetske tiristore. Povećanjem (smanjenjem) referentnog napona mijenja se radni ciklus impulsa u CT5.
Evo oscilograma. 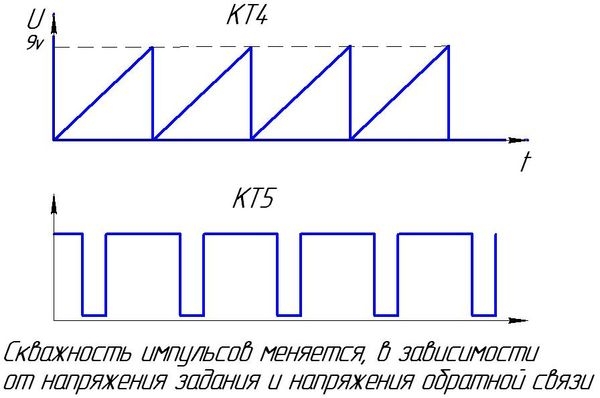
Ali nećemo vidjeti nikakve impulse u KT5 dok ne pritisnemo dugme “Start” - S1. Kada se dugme ne pritisne, napon napajanja +12V kroz normalno zatvorene kontakte S1 duž lanca R12, D3 se dovodi na inverzni ulaz DA1.2 i jednak je oko 11V. Budući da ovaj napon prelazi napon “pile” od 9V, komparator je zaključan i ne generiraju se kontrolni impulsi za otvaranje tiristora. Da bi se spriječila nesreća i kvar motora, ako operater ne postavi regulator brzine na "0", krug osigurava jedinicu za ubrzanje C5, R13, koja služi za glatko ubrzanje motora. U načinu rada "Start", krug radi na sljedeći način: kada pritisnete tipku "Start", normalno zatvoreni kontakti se otvaraju i kondenzator C5 duž lanca - "zemlja", R13, - C5 počinje da se nesmetano puni i napon se uključuje negativna ploča kondenzatora glatko teži nuli. Istovremeno, napon na invertujućem ulazu DA1.2 glatko raste do vrijednosti određene referentnim naponom, a komparator počinje generirati upravljačke impulse za tiristore snage. Vrijeme punjenja određeno je ocjenama C5, R13. Ako je tokom rada motora potrebno promijeniti njegovu brzinu kako bi se izbjegle iznenadne skokove brzine, krug osigurava jedinicu „ubrzanja-kočenja“ R21, C8, R22. Kada se referentni napon povećava (smanjuje), kondenzator C8 se glatko puni (prazni), što sprječava oštar "nalet" napona na inverznom ulazu pojačala i, kao rezultat, sprječava naglo povećanje brzine motora.
Pogledajmo sada princip rada regulator brzine.
Regulator je dizajniran da održava konstantnu brzinu motora u kontrolnoj zoni. Regulator je diferencijalno pojačalo sa zbirom dva napona: referentnog napona i napona povratne informacije. Referentni napon je postavljen otpornikom RP1 i napaja se preko filtera R20, C8, R21, koji istovremeno obavlja funkcije jedinice „ubrzanja-usporavanja“, a napaja se na inverzni ulaz regulatora op-amp DA1.3. Kako se referentni napon na izlazu op-pojačala DA1.3 povećava, izlazni napon opada linearno.
Izlazni napon regulatora se dovodi na inverzni ulaz komparatora SIFU DA1.2 gdje se, zbrojen sa pilastim impulsima napona, pretvara u niz pravokutnih impulsa koji idu na upravljačke elektrode tiristora. Kako se referentni napon povećava (smanjuje), izlazni napon na izlazu pogonske jedinice također se povećava (smanjuje).
Ovaj grafikon prikazuje ovisnost brzine motora o referentnom naponu. 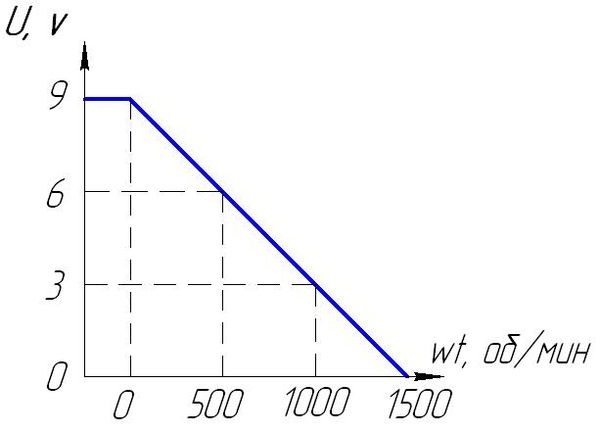
Vrijednosti brzine motora date su kao primjer.
Razdjelnik napona R22, R23 spojen na direktni ulaz regulatora DA1.3 služi za sprječavanje kvara motora kada je povratna sprega prekinuta (ako je povratna sprega prekinuta, motor ide u overdrive).
Kada se pogon uključi, tahogenerator počinje stvarati napon proporcionalan brzini motora. Ovaj napon se dovodi na ulaz preciznog detektora DA1.4, DA2.1 sastavljenog pomoću punotalasnog kola. Napon uzet sa izlaza preciznog detektora DA1.4, DA2.1 se preko filtera C10, R30, R33 dovodi do skalirajuće povratne sprege DA2.2. Pojačalo se koristi za podešavanje povratnog napona koji dolazi iz tahogeneratora. Napon na izlazu op-amp DA2.2. se napaja i na ulaz regulatora DA1.3 i na zaštitno kolo DA2.3.
Otpornik RP1 postavlja brzinu motora. Kada motor radi bez opterećenja, napon na izlazu skalirajućeg pojačala je niži od napona na pin 6 op-pojačala DA1.3. ≈ +5v, tako da pogon radi kao regulator. Kako raste opterećenje na osovini motora, napon primljen od tahogeneratora se smanjuje i, kao posljedica toga, smanjuje se napon iz izlaza pojačivača skaliranja.
Kada je ovaj napon manji od napona na pinu 5 op-pojačala DA1.3, pogon ulazi u zonu stabilizacije struje. Smanjenje napona na neinvertirajućem ulazu op-pojačala DA1.3 dovodi do smanjenja napona na njegovom izlazu, a budući da radi na invertujućem pojačalu DA1.2, to dovodi do većeg ugla otvaranja tiristori i, posljedično, do povećanja napona na kotvi motora.
ZAŠTITNI KRUG
Zaštita od prekoračenja brzine je dizajnirana da zaštiti motor od nezgode ako se zadata brzina motora iznenada prekorači. Kolo je sastavljeno pomoću op-pojačala DA2.3, povezanog prema komparatorskom kolu. Referentni napon iz razdjelnika R36, R37, RP3 se dovodi na inverzni ulaz komparatora. Otpornik RP3 postavlja zaštitni prag. Napon sa izlaza skalirajućeg pojačivača DA2.2 dovodi se na direktni ulaz zaštitnog komparatora DA2.3. Kada broj obrtaja motora premašuje nazivnu brzinu, napon na direktnom ulazu komparatora prelazi prag zaštitnog podešavanja koji je određen RP3 - komparator se uključuje. Zbog prisustva pozitivne povratne sprege u kolu, R38 uzrokuje „škljocanje” komparatora, a prisustvo diode VD12 sprječava resetiranje komparatora. Kada se zaštita aktivira, napon sa izlaza komparatora zaštite (≈ +11v) preko VD14 diode se dovodi na inverzni ulaz 13 DA1.2 SIFU, a pošto zaštitni napon prelazi napon „pile“ (= 9v ) - izdavanje kontrolnih impulsa kontrolnim je trenutno zabranjeno tiristorskim elektrodama. Napon sa izlaza zaštitnog komparatora DA2.3 otvara tranzistor VT4, što uzrokuje da relej P1.1 radi i da se pali LED VL1, signalizirajući hitan slučaj. Zaštitu možete ukloniti samo tako što ćete potpuno isključiti pogon i nakon pauze od 5 - 10 sekundi ponovo ga uključiti.
Snažni dio upravljačke jedinice.
Dijagram strujnog dijela je prikazan ispod 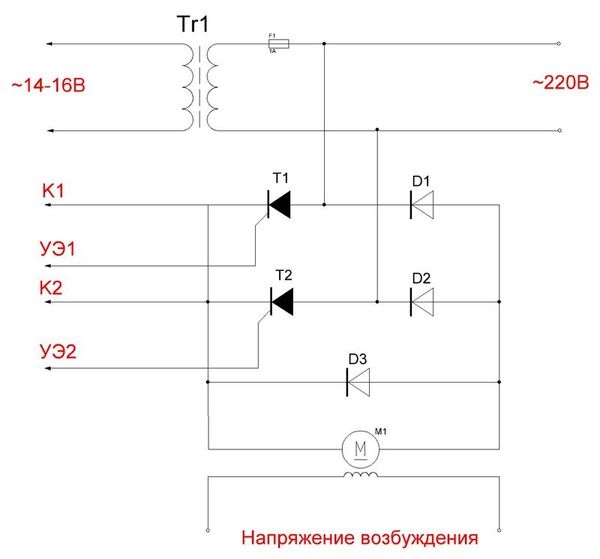
Transformator Tr1 je dizajniran za napajanje strujnog kruga kontrolne jedinice. Kontrolirani ispravljač je sastavljen pomoću polumostnog simetričnog kola i sadrži dvije energetske diode D1, D2
i dva strujna tiristora T1, T2 i zaštitnu diodu D3. Namotaj polja se napaja sopstvenim zasebnim transformatorom i ispravljačem.
Ako motor nema tahogenerator, povratna informacija za kontrolu brzine može se izvesti na sljedeći način:
1. Koristite strujni transformator spojen na strujni krug kontroliranog ispravljača 
Ako se koristi strujni transformator, postavite kratkospojnik P1 na dijagram upravljačke jedinice
na poziciju 1-3, to je neophodno jer kako raste opterećenje, struja armature će se povećavati, pa će se i napon koji se uklanja sa strujnog transformatora povećati, pa se povratni napon mora primijeniti na invertiranje
izlaz DA1.3 čipa. Također možete ugraditi standardni strujni šant, ali samo u krug armature motora, nakon ispravljača, i ukloniti povratni signal iz njega.
2. Koristite senzor napona armature. Dijagram je prikazan ispod. 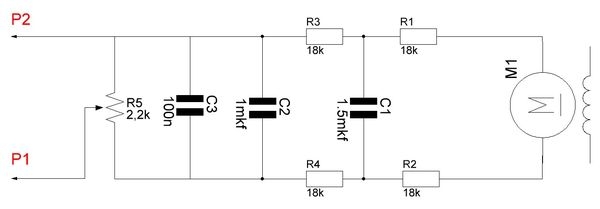
Senzor napona armature je filter-razdjelnik i spojen je direktno na priključke armature elektromotora. Pogon je konfigurisan na sledeći način. Otpornici “Task” i “Scaling Uoc” su postavljeni na srednji položaj. Otpornik R5 senzora napona armature postavljen je u donji položaj "uzemljenja". Uključujemo pogon i postavljamo napon na kotvi motora na otprilike 110 volti. Kontrolom napona na armaturi motora počinjemo rotirati otpornik R5. U određenoj točki regulacije, napon na armaturi će se početi smanjivati, što ukazuje da je povratna informacija počela raditi.
Sada prijeđimo na dizajn i podešavanje kontrolne jedinice.
Upravljačka jedinica je napravljena na štampanoj ploči (PCB fajl) 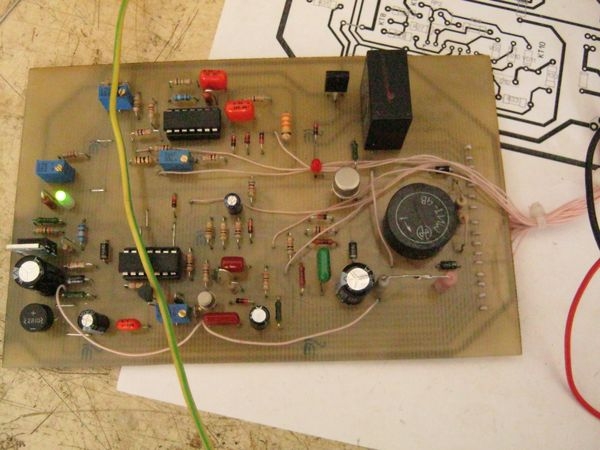

Ploča je spojena MGTF žicom na konektor radi lakšeg rastavljanja tokom popravki.
Postavke
Tokom postavljanja, energetski dio je montiran pomoću zidne instalacije, a kao opterećenje je korištena obična žarulja sa žarnom niti. 
Postavljanje počinjemo provjerom napona napajanja i napona napajanja na operacionim pojačalima DA1, DA2. Preporučljivo je ugraditi mikro kola u utičnice. Zatim pratimo oscilograme na kontrolnim tačkama KT1, KT2, KT3 (oscilogrami na tim tačkama dati su na početku opisa SIFU). Sada osciloskop postavljamo na kontrolnu tačku KT4. Trebalo bi da ima pilastih impulsa, kao na osilogramu iznad (dugme „Start“ bi trebalo da bude otvoreno u ovom trenutku). Koristeći trimer otpornik RP1, potrebno je podesiti zamah "pile" na 9 volti; ovo je vrlo važna točka, jer određuje dalji rad shema. Budući da širenje u parametrima tranzistora s efektom polja može biti prilično značajno, možda raspon podešavanja RP1 možda neće biti dovoljan, tada odabirom vrijednosti otpornika R10, postignete željeni raspon. Na kontrolnoj tački KT3, trajanje impulsa bi trebalo biti 1,5 - 1,8 ms; ako nije, odaberite otpornik R4 (prema smanjenju) kako biste postigli potrebno trajanje.
Rotacijom RR1 regulatora na kontrolnoj tački KT5 provjerite promjenu radnog ciklusa impulsa od maksimuma do njihovog potpunog nestanka kada je klizač RR1 u donjem položaju. U tom slučaju bi se trebala promijeniti svjetlina sijalice spojene na jedinicu za napajanje.
Zatim spajamo upravljačku jedinicu na motor i tahogenerator. Postavili smo ga sa RR1 regulatorom
napon armature je oko 40-50 volti. Otpornik RP3 treba postaviti na srednji položaj. Kontrolom napona na armaturi motora počinjemo rotirati otpornik RP3. U određenoj točki regulacije, napon na armaturi će se početi smanjivati, što ukazuje da je povratna informacija počela raditi. Za one koji žele eksperimentirati: da biste povećali krutost pogona, također možete povećati otpor R24, čime se povećava pojačanje regulatora ili povećati otpornik R32.
Ako se koristi povratna struja armature motora.
Za to, kao što je gore spomenuto, potreban vam je strujni transformator uključen u strujni krug
kontrolisani ispravljač. Dijagram kalibracije strujnog transformatora je dat u nastavku. Odabirom otpornika dobiti naizmjenični napon od ≈ 2 ÷ 2,5 V na izlazu transformatora. Snaga opterećenja RN1 mora odgovarati snazi motora. 
Pažnja! Nemojte uključivati strujni transformator bez otpornika opterećenja.
Strujni transformator povezujemo s povratnim krugom P1 i P2. Prilikom postavljanja “Regulatora” preporučljivo je odlemiti D12 diodu kako bi se spriječilo lažno aktiviranje zaštite.
Oscilogrami na kontrolnim tačkama KT8, KT9, KT10 trebaju biti kao na slici ispod. 
Dalja podešavanja su ista kao u slučaju korištenja tahogeneratora.
Ako se koristi povratna sprega napona armature motora.
Kao što je gore navedeno, možete primijeniti povratnu vezu napona armature; za to se sastavlja senzor napona armature. Upravljačka jedinica je konfigurirana na sljedeći način. Otpornici “Task” i “Scaling Uoc” su postavljeni na srednji položaj. Otpornik R5 senzora napona armature postavljen je u donji položaj "uzemljenja". Uključujemo pogon i postavljamo napon na kotvi motora na otprilike 110 volti. Kontrolom napona na armaturi motora počinjemo rotirati otpornik R5. U određenoj točki regulacije, napon na armaturi će se početi smanjivati, što ukazuje da je povratna informacija počela raditi.
Ova kontrolna jedinica je proizvedena za bušilicu. Evo fotografije ovog čudovišta 

Na ovoj mašini je pokvario električni mašinski pojačavač, koji je kontrolisao DC motor za pomeranje stola.
Evo pojačala za električnu mašinu. 
Umjesto toga je napravljena ova kontrolna jedinica.
Evo fotografije samog DC motora. 
Upravljačka jedinica je montirana na izolacijskoj bazi, gdje su smješteni svi glavni elementi. 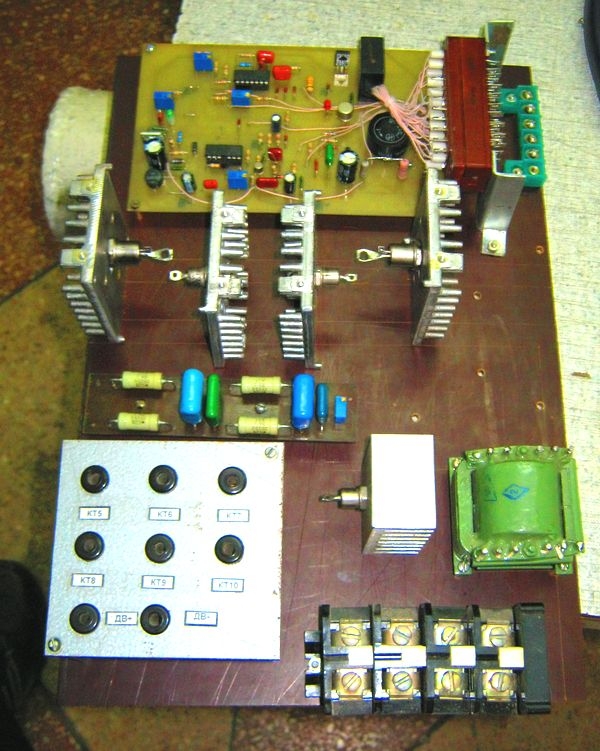
Energetske diode i tiristori su ugrađeni na hladnjake. Izrađen je i panel sa konektorima na koji su izlazili signali sa kontrolnih tačaka kola. Ovo je učinjeno radi lakšeg podešavanja i popravke direktno na mašini.
Ovdje je montirana upravljačka jedinica u ormaru za napajanje mašine 


Mala kontrolna tabla postavljena je sa druge strane ormara. 
Sadrži:
-prekidač za uključivanje uređaja
- prekidač za način rada. Budući da za instalacijske pomake stola mašine nije potrebna precizna kontrola i stabilizacija okretaja, krug povratne sprege se zaobilazi za to vrijeme.
- dugmad za podešavanje broja okretaja. Isporučena su dva varijabilna otpornika, jedan za grubo podešavanje, drugi - višeokretni - za precizno podešavanje potrebne brzine pri grubom i finom bušenju dijela.
Za zainteresovane, ispod je video snimak mašine u radu. Prvo je prikazan provrt za rupu čelična ploča 20mm debljine. Zatim se prikazuje kojom frekvencijom se okreće vijak za dovod stola mašine. Pri ovoj brzini, dio se dovodi do rezača, a ovu brzinu rotacije pužnog zavrtnja osigurava DC motor, za koji je, zapravo, sve to i učinjeno.
Upravljačka jedinica je radila dobro, nije bilo kvarova ili nezgoda.
Tamo gdje je potrebna glatka i precizna kontrola brzine i momenta elektromotora u širokom rasponu, potreban je upravljački krug DC motora
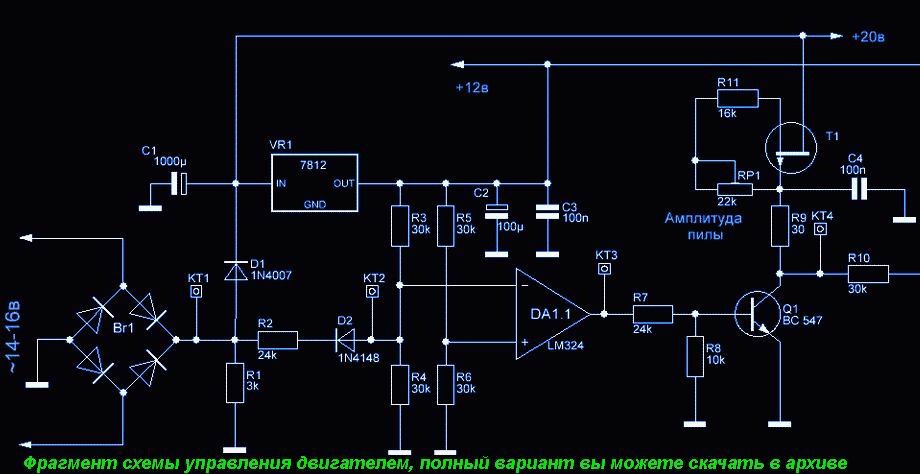
SIFU - Impulsno-fazni kontrolni sistem vrši sinusoidnu konverziju mrežnog napona u niz pravokutnih impulsa koji teku do kontrolnih terminala energetskih tiristora. Kada se krug uključi, naizmjenični napon od 14 - 16 volti prelazi na mosni ispravljač i pretvara se u pulsirajući napon, koji služi ne samo za napajanje konstrukcije, već i za sinkronizaciju rada uređaja. Dioda D2 ne izglađuje impulse kondenzatora C1. Zatim impulsi slijede do “nula detektora” napravljenog na operacionom pojačalu LM324, element DA1.1, uključen u komparatorskom modu. Iako nema impulsa, naponi na direktnim i inverznim ulazima op-ampa su približno isti i komparator je uravnotežen.
Kada sinusoida prođe kroz nultu tačku, na inverznom ulazu komparatora se pojavljuju impulsi koji prebacuju komparator, zbog čega se na izlazu DA1.1 generiraju pravokutni sinhronizacijski impulsi, čiji period ponavljanja ovisi o nuli tačka. Pogledajte oscilograme da biste razumjeli princip rada. Od vrha do dna: KT1, KT2, KT3.
U programu je simuliran upravljački krug DC motora. Arhivirano sa puna verzija Dizajn koji je u pitanju ima projektni fajl za ovaj program. Možete ga otvoriti i vizualno vidjeti kako ova jedinica radi, te shodno tome izvući konačne zaključke o upravljanju DC motorom, prije nego počnete sastavljati radioamaterski domaći proizvod.
Vratimo se na posao - impulsi sata idu do integratora sa tranzistorskim prekidačem (C4, Q1), gdje se generira pilasti napon. U trenutku kada faza prođe kroz nultu tačku, taktni impuls otključava prvi tranzistor, koji prazni kapacitivnost C4. Nakon opadanja impulsa, tranzistor se isključuje i kapacitivnost se puni do dolaska sljedećeg takta, zbog čega se na kolektoru tranzistora (oscilogram KT4) formira linearno rastući pilasti napon, stabiliziran generatorom stabilne struje na unipolarni tranzistor T1.
Amplituda pilastog napona od oko 9 volti postavlja se otporom rezanja RP1. Ovaj napon se primjenjuje na direktni ulaz komparatora DA1.2. Referentni napon prati inverzni ulaz komparatora DA1.2 i u trenutku kada amplituda pilastog napona pređe napon na inverznom ulazu, komparator se prebacuje u suprotno stanje i na njegovom izlazu se generiše impuls (oscilogram KT4 ).
Impuls se diferencira kroz lanac pasivnih radio komponenti R14, C6 i prati do baze drugog bipolarnog tranzistora, koji se zahvaljujući tome otvara i formiraju impulsi otvaranja energetskih tiristora na impulsnom transformatoru. Povećanjem ili smanjenjem referentnog napona, možete podesiti radni ciklus impulsa u CT5.
Ali nećemo vidjeti nikakve impulse na oscilogramu KT5 dok ne pritisnemo prekidač S1. Kada se ne pritisne, napon napajanja +12V preko prednjih kontakata S1 do R12, D3 ide na inverzni ulaz DA1.2. Budući da je ovaj napon veći od napona "pile", komparator se zatvara i impulsi otvaranja tiristora se ne stvaraju.
Da bi se spriječile hitne situacije i oštećenje elektromotora, ako regulator brzine nije postavljen na "0", krug ima jedinicu za ubrzanje na elementima C5, R13, dizajniranu za glatko ubrzanje motora.
Kada se pritisne prekidač S1, kontakti se otvaraju i kapacitivnost C5 počinje glatko da se puni, a napon na negativnoj ploči kondenzatora približava se nuli. Napon na invertnom ulazu DA1.2 raste do vrijednosti referentnog napona, a komparator počinje generirati impulse za otvaranje energetskih tiristora. Vrijeme punjenja određuju radio komponente C5, R13.
Ako je tokom rada motora potrebno podesiti njegovu brzinu, u krug je dodana jedinica za ubrzanje i kočenje R21, C8, R22. Kada se ciljni napon povećava ili smanjuje, kapacitivnost C8 se glatko puni ili prazni, što eliminira oštar "nalet" napona na inverznom ulazu i, kao rezultat, eliminira naglo povećanje brzine motora.
Regulator se koristi za održavanje konstantne brzine u zoni regulacije. Regulator je napravljen na bazi diferencijalnog pojačala sa zbirom dva napona: referentnog i povratnog. Referentni napon formiran je otporom RP1 i prati kroz filter na komponentama R20, C8, R21, koji djeluje kao jedinica za ubrzanje i usporavanje, te se dovodi na inverzni ulaz DA1.3. Kako se referentni napon na izlazu DA1.3 povećava, izlazni napon opada linearno.
Izlazni napon regulatora slijedi na inverzni ulaz komparatora SIFU DA1.2 gdje se, zbrojen sa impulsima "pile", pretvara u niz pravokutnih impulsa koji putuju do elektroda tiristora. Kada se referentni napon povećava ili smanjuje, izlazni napon na izlazu jedinice za napajanje također se povećava ili smanjuje. Grafikon prikazuje ovisnost brzine motora o referentnom naponu.
Razdjelnik napona na otpornicima R22, R23 spojenim na direktni ulaz regulatora DA1.3 dizajniran je da eliminira hitnu situaciju kada je povratna sprega prekinuta.
Kada je pogon uključen, tahogenerator stvara napon proporcionalan brzini elektromotora. Ovaj napon ide na ulaz preciznog detektora DA1.4, DA2.1, izgrađenog po klasičnom punotalasnom kolu. Iz njegovog izlaza napon slijedi kroz filter do pasivne komponente C10, R30, R33 na DA2.2 OS skalirajuće pojačalo. Pojačalo se koristi za podešavanje napona OS koji dolazi iz tahogeneratora. Napon sa izlaza DA2.2 ide na ulaz DA1.3 i na zaštitni krug DA2.3.
Otpor RP1 generiše brzinu motora. Kada radi bez opterećenja, napon na izlazu skalirajućeg pojačala je manji od napona na šestom pinu DA1.3, tako da pogon radi kao regulator.
Kako se opterećenje na osovini povećava, napon koji se uklanja iz tahogeneratora se smanjuje i, kao rezultat, smanjuje se napon iz izlaza pojačala za skaliranje. Kada je ovaj nivo manji od noge 5 op-amp DA1.3, pogon će ući u trenutnu stabilizacijsku zonu. Smanjenje napona na neinvertujućem ulazu DA1.3 će smanjiti napon na njegovom izlazu, a pošto radi na invertujuće pojačalo DA1.2, to će povećati ugao otvaranja tiristora i samim tim povećati nivo na armatura elektromotora.
Zaštita od prekoračenja brzine je montirana na operacionom pojačalu DA2.3, spojenom kao komparator. Njegov inverzni ulaz prima referentni napon od razdjelnika R36, R37, RP3. Otpor RP3 reguliše nivo rada zaštite. Napon sa izlaza DA2.2 pojačala ide na direktni ulaz DA2.3.
Kada brzina prelazi nominalnu vrijednost, direktni ulaz komparatora prelazi prag postavke zaštite, određen otporom RP3, i komparator se uključuje.
Zbog prisustva pozitivne povratne sprege u krugu, R38 uzrokuje da se komparator "zakači", a dioda VD12 ne dozvoljava da se komparator resetuje. Kada se zaštita aktivira, izlaz komparatora ide preko diode VD14 na inverzni ulaz 13 DA1.2 SIFU, a pošto je zaštitni napon veći od nivoa „pile“, dolazi do izdavanja kontrolnih impulsa na elektrode energetskih tiristora. će biti odmah zabranjeno.
Napon sa izlaza zaštitnog komparatora DA2.3 otključava tranzistor VT4, što uzrokuje da se relej P1.1 uključi i LED za signalizaciju nesreće svijetli. Zaštitu možete ukloniti ako potpuno isključite disk i, nakon pauze od 5 - 10 sekundi, ponovo uključite napajanje.
Snažni dio kontrolne jedinice prikazan je na donjoj slici:
Transformator Tr1 se koristi za napajanje strujnog kruga upravljačke jedinice. Ispravljač je sastavljen pomoću polumostnog kola i uključuje dvije energetske diode D1, D2 i dva strujna tiristora T1, T2, kao i zaštitnu diodu D3. Namotaj polja se napaja sopstvenim zasebnim transformatorom i ispravljačem. Ako motor nema tahogenerator, tada se OS za kontrolu brzine može implementirati na sljedeći način:

Ako je primjenjivo strujni transformator, zatim kratkospojnik P1 na dijagramu upravljačke jedinice DC motora mora biti postavljen na položaj 1-3.
Možete koristiti i senzor napona armature:

Senzor napona armature je filter-razdjelnik spojen direktno na terminale armature. Pogon je konfigurisan na sledeći način. Otpori “Task” i “Scaling Uoc” su okrenuti u srednji položaj. Otpor R5 senzora napona armature je smanjen na minimum. Uključujemo pogon i postavljamo napon armature na oko 110 volti. Mjereći napon na armaturi, počinjemo rotirati otpor R5. U određenom trenutku promjene, napon na armaturi će početi padati, što ukazuje da je OS radio.
Crtež štampane ploče za upravljanje DC motorom je napravljen u programu i lako ga možete napraviti štampana ploča uradi sam metod
Počnimo s postavljanjem dizajna provjeravanjem napona napajanja na op-pojačivačima DA1, DA2. Preporučuje se ugradnja mikro krugova u utičnice. Zatim provjeravamo oscilograme na kontrolnim tačkama KT1, KT2, KT3. U tački CT4. trebali bismo vidjeti pilaste impulse kada je dugme otvoreno.
Koristeći otpor podešavanja RP1 postavili smo zamah “pile” na oko 9 volti. Na kontrolnoj tački KT3, trajanje impulsa je oko 1,5 - 1,8 ms; ako to ne vidimo, onda smanjenjem otpora R4 postižemo potrebno trajanje.
Okretanjem poluge RR1 na kontrolnoj tački KT5 kontroliramo promjenu radnog ciklusa impulsa od maksimalnog do njihovog potpunog nestanka uz minimalni otpor RR1. U tom slučaju bi se trebala promijeniti svjetlina sijalice spojene na jedinicu za napajanje koju smo spojili kao opterećenje.
Zatim spajamo upravljačku jedinicu na motor i tahogenerator. Koristeći RR1 regulator, postavili smo napon armature na 40-50 volti. Otpor RP3 bi trebao biti u srednjoj poziciji. Mjereći napon na armaturi motora, rotiramo otpor RP3. U određenom trenutku podešavanja, napon na armaturi će početi padati, što ukazuje da je povratna informacija radila.
Ako se koristi povratna struja armature, potreban je strujni transformator, spojen na strujni krug ispravljača. Krug kalibracije strujnog transformatora je razmotren u nastavku. Odabirom otpora dobiti naizmjenični napon od 2 ÷ 2,5 V na izlazu transformatora. Snaga opterećenja RN1 mora biti jednaka snazi motora
Zapamtite da se ne preporučuje uključivanje strujnog transformatora bez otpornika opterećenja.
Strujni transformator spajamo na OS kolo P1 i P2. Prilikom podešavanja preporučuje se odlemiti D12 diodu kako bi se izbjeglo lažno aktiviranje zaštite. Oscilogrami na kontrolnim tačkama KT8, KT9, KT10 prikazani su na donjoj slici.

Dalje podešavanje je isto kao u slučaju korištenja tahogeneratora.
Ova upravljačka jedinica DC motora izrađena je ručno za bušilicu. Fotografije pogledajte u arhivi na zelenom linku iznad.
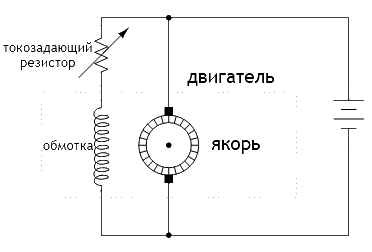
U DC motorima, obrtni moment se stvara reakcijom između dva magnetna polja: jedno polje uspostavlja stacionarni namotaj polja, a drugo namotaji u rotirajućoj armaturi. Neki DC motori nemaju namotaj polja, ali umjesto toga imaju velike trajne magnete koji održavaju stacionarno magnetsko polje konstantnim u svim radnim uvjetima.
U svakom slučaju, princip rada DC motora je da struja koja prolazi kroz armaturu stvara magnetsko polje koje pokušava da se uskladi sa stacionarnim poljem. I tako se sidro okreće:
Kako god, kolekcionar(tzv. skup segmentiranih bakrenih traka), prekida električni kontakt sa već "poravnanim" namotom i pobuđuje drugi namotaj (ili kao u jednostavan primjer, prikazan gore, preuzbuđuje isti krug u suprotnom smjeru), stvarajući još jedno neusklađeno magnetno polje koje nastavlja da rotira armaturu. Električni kontakt između rotirajućih segmenata komutatora i stacionarnog izvora napajanja se odvija preko ugljenih četkica. Ove četke se nakon toga istroše određeno vrijeme(kao i sam kolektor) i stoga zahtijevaju periodičnu zamjenu.
Većina industrijskih DC motora proizvodi se s više namotaja armature, a ne samo s jednim kao što je prikazano na pojednostavljenoj slici iznad. Ovdje je prikazana fotografija velikog (1250 KS) DC elektromotora koji se koristi za pogon trajekta, sa namotajima i armaturom:

Jedan sklop četkica ovog elektromotora pokazuje izbliza pogled na obje karbonske četke, držač s oprugom i mnoge komutatorske šipke koje četkica dodiruje dok se armatura rotira.

Kod istosmjernih motora javljaju se sljedeći odnosi između mehaničkih i električnih veličina:
Moment:
- Moment je direktno proporcionalan jačini magnetnog polja armature, što je, zauzvrat, direktno proporcionalno struji koja prolazi kroz namotaje armature;
- Moment je također direktno proporcionalan jačini konstantnog magnetskog polja, koje je, zauzvrat, direktno proporcionalno struji koja prolazi kroz uzbudljivi namotaj (u motoru bez magneta).
- Brzina je ograničena emf koji stvara armatura pri rotaciji u konstantnom magnetskom polju. Ovaj EMF je direktno proporcionalan brzini rotacije armature, a takođe je direktno proporcionalan jačini konstantnog magnetnog polja (koje je direktno proporcionalno struji uzbudljivog namota u elektromotoru bez magneta);
- Stoga je brzina direktno proporcionalna naponu armature;
- Takođe, brzina je obrnuto proporcionalna jačini konstantnog magnetnog polja, koje je direktno proporcionalno struji koja prolazi kroz uzbudljive namote (kod motora bez magneta).

Smanjenje otpora otpornika za podešavanje struje omogućava da više struje teče kroz uzbudljivi namotaj, povećavajući njegovo magnetsko polje. Ovo će imati dva efekta na rad motora: prvo, motor će proizvoditi više obrtnog momenta nego prije (za istu količinu struje armature), budući da će na armaturu djelovati jače magnetno polje armature; drugo, brzina motora će se smanjiti pošto će veliki povratni EMF biti generisan od strane rotirajuće armature pri istoj brzini rotacije i ovaj povratni EMF će prirodno pokušati da bude jednak primenjenom naponu DC izvora. S druge strane, možemo povećati brzinu DC motora (i smanjiti izlazni moment) povećanjem otpora kontrolnog otpornika, slabeći stacionarno magnetsko polje koje rotira armaturu.
Podešavanjem struje namotaja možete promijeniti ravnotežu između brzine i momenta, ali to nije dovoljno za kontrolu cjelokupnog moć motor. Za kontrolu izlazne snage DC motora moramo također kontrolirati napon i struju armature. Za ovaj zadatak se mogu koristiti promjenjivi otpornici, ali ova metoda se trenutno ne koristi jer dovodi do gubitka snage.
Najbolje rješenje bi bilo korištenje električnog kruga za kontrolu napajanja tranzistorski prekidači brzo gašenje i uključivanje armature motora u strujnom kolu. Ova vrsta kontrole se naziva modulacija širine impulsa ili PWM.
(odnos trajanja pulsa i perioda ponavljanja, obrnuto od krug duznosti Veličina impulsa određuje udio snage koja se isporučuje motoru:

Na slikama greška nije „faktor rada“, već „faktor rada“
Takve elektronsko kolo regulacija snage se obično naziva voziti. Dakle, pogon sa varijabilna brzina(ili VSD) je strujni krug velike snage koji se koristi za kontrolu brzine DC motora. Motorni pogoni se mogu ručno podesiti da pokreću motor pri datoj brzini ili mogu prihvatiti elektronske upravljačke signale za promjenu brzine motora na isti način na koji elektronički signali kontroliraju kretanje. Opremljen daljinski sistem prenoseći upravljačke signale, pogon funkcionira kao i svaki drugi krajnji aktuator: slijedeći komande kontrolera, stabilizira određeni tehnološki parametar.
By tradicionalna tehnologija Za prekidačko napajanje kolo za korištenje motora jednosmjerne struje kontrolisani ispravljač, u koji se transformiše naizmjenična struja U DC, tiristori se koriste umjesto konvencionalnih ispravljačkih dioda. Glavni izvor energije za industrijske istosmjerne motore ostaje naizmjenična struja, a ova naizmjenična struja se u nekom trenutku u sistemu mora pretvoriti u jednosmjernu struju; Ima smisla integrirati kontrolu direktno u ovu ispravljačku jedinicu:

Kontrolirani ispravljački krug radi na principu promjene vremena "početnog" impulsa u odnosu na oscilacijske impulse naizmjenične struje. Što se ranije u svakom ciklusu naizmenične struje tiristor otvori, duže će dozvoliti struji da teče do motora. Kontrolni krug faze odgovoran je za generiranje impulsa i njihovo trajanje.
DC pogon koji jednostavno regulira snagu motora bio bi grub i težak za kontrolu za većinu procesa. Ono što biste idealno željeli od pogona s promjenjivom brzinom je precizna kontrola. brzina motor. Iz tog razloga, većina pogona je dizajnirana da prima povratnu informaciju od tahometra mehanički spojenog na osovinu motora. Tahometar je obično mali generator koji stvara konstantan pritisak, direktno proporcionalno brzini rotacije osovine (sa izlazom 0-10 V). Prema njegovim očitanjima, podesivi pogon gasi električna energija, napaja se motoru tako da se brzina rotacije poklapa s onom navedenom kontrolnim signalom. Sa ugrađenom povratnom spregom za kontrolu brzine, pogon s promjenjivom brzinom postaje "slave kontroler" u upravljačkom sistemu. Pogon može primiti izlaz referentne brzine
Vladimir Rentjuk, Zaporožje, Ukrajina
Članak daje kratka recenzija i analizu popularnih kola dizajniranih za upravljanje brušenim DC motora, a nudi i originalna i malo poznata rješenja kola
Elektromotori su vjerojatno jedan od najpopularnijih proizvoda elektrotehnike. Kao što nam sveznajuća Wikipedija kaže, Električni motor - električni automobil(elektromehanički pretvarač), u kojem Električna energija pretvara u mehaničku. Početkom njegove povijesti može se smatrati otkriće Michaela Faradaya davne 1821. godine, utvrdivši mogućnost rotacije provodnika u magnetskom polju. Ali prvi manje-više praktičan elektromotor s rotirajućim rotorom čekao je do 1834. godine na svoj izum. Dok je radio u Königsbergu, izumio ga je Moritz Hermann von Jacobi, nama poznatiji kao Boris Semenovich. Elektromotore karakteriziraju dva glavna parametra - brzina rotacije osovine (rotora) i okretni moment razvijen na osovini. IN uopšteno govoreći oba ova parametra zavise od napona koji se dovodi do motora i struje u njegovim namotajima. Trenutno postoji prilično mnogo varijanti elektromotora, a pošto je, kako je primetio naš poznati književni lik Kozma Prutkov, nemoguće dokučiti neizmernost, zadržaćemo se na razmatranju karakteristika upravljanja DC motora (u daljem tekstu: kao elektromotori).
Postoje dvije vrste DC motora - motori s četkicom na koje smo navikli i motori bez četkica (stepper). U prvom, izmjenično magnetsko polje, koje osigurava rotaciju osovine motora, formiraju namoti rotora, koji se napajaju preko komutatora četkice - komutatora. U interakciji je sa konstantom magnetsko polje statora, rotirajući rotor. Za rad takvih motora nisu potrebni vanjski komutatori, njihovu ulogu igra kolektor. Stator se može napraviti od bilo kojeg sistema trajni magneti i od elektromagneta. Kod drugog tipa elektromotora namotaji čine stacionarni dio motora (stator), a rotor je napravljen od trajnih magneta. Ovdje se naizmjenično magnetsko polje generira prebacivanjem namotaja statora, što se izvodi pomoću vanjskog upravljačkog kruga. Koračni motori engleski pravopis) su mnogo skuplji od kolekcionarskih. Ovo je dovoljno složenih uređaja sa njihovim specifične karakteristike. Njihova Puni opis zahtijeva posebnu publikaciju i izvan je okvira ovog članka. Za potpunije informacije o motorima ove vrste i njihovim upravljačkim krugovima, možete pogledati, na primjer,.
Brušeni motori (slika 1) su jeftiniji i generalno ne zahtijevaju složeni sistemi menadžment. Za njihov rad dovoljno je napajati napon napajanja (ispravljen, konstantan!). Problemi počinju nastajati kada postane potrebno podesiti brzinu rotacije osovine takvog motora ili koristiti poseban način kontrole zakretnog momenta. Tri su glavna nedostatka takvih motora: mali obrtni moment niske brzine rotacija (stoga je često potreban mjenjač, a to utječe na cijenu strukture u cjelini), generacija visoki nivo elektromagnetne i radio smetnje (zbog kliznog kontakta u kolektoru) i niska pouzdanost (tačnije, kratak resurs; razlog je u istom kolektoru). Prilikom korištenja komutatorskih motora potrebno je uzeti u obzir da potrošnja struje i brzina vrtnje njihovog rotora ovise o opterećenju osovine. Brušeni motori su svestraniji i šire se koriste, posebno u jeftinim aplikacijama gdje je cijena odlučujući faktor.
Od brzine rotora komutatorski motor zavisi, prije svega, od napona koji se dovodi do motora, prirodno je koristiti sklopove za njegovo upravljanje koji imaju mogućnost podešavanja ili podešavanja izlaznog napona. Takva rješenja koja se mogu naći na internetu su sklopovi bazirani na podesivim stabilizatorima napona, a kako je doba diskretnih stabilizatora odavno prošlo, preporučljivo je koristiti npr. jeftine integrirane stabilizatore kompenzacije. Moguće opcije Takva šema je prikazana na slici 2.
Shema je primitivna, ali izgleda vrlo uspješna i, što je najvažnije, jeftina. Pogledajmo to sa stanovišta inženjera. Prvo, da li je moguće ograničiti obrtni moment ili struju motora? Ovo se može riješiti ugradnjom dodatnog otpornika. Na slici 2 je označen kao R LIM. Njegov proračun je uključen u specifikaciju, ali pogoršava karakteristike kruga kao stabilizatora napona (više o tome u nastavku). Drugo, koja opcija kontrole brzine je bolja? Opcija na slici 2a daje zgodnu linearnu kontrolnu karakteristiku, zbog čega je i popularnija. Opcija na slici 2b ima nelinearnu karakteristiku. Ali u prvom slučaju, ako je kontakt u promjenjivom otporniku prekinut, dobivamo maksimalna brzina, au drugom - minimalno. Što odabrati ovisi o specifičnoj primjeni. Pogledajmo sada jedan primjer za motor sa tipičnim parametrima: radni napon 12 V; maksimalna radna struja je 1 A. LM317 IC, u zavisnosti od sufiksa, ima maksimalnu izlaznu struju od 0,5 A do 1,5 A (vidi specifikaciju; postoje slični IC sa većom strujom) i razvijenu zaštitu (od preopterećenja i pregrijavanja). Sa ove tačke gledišta, idealan je za naš zadatak. Problemi se kriju, kao i uvek, u malim stvarima. Ako se motor dovede na maksimalnu snagu, što je vrlo realno za našu primjenu, tada će IC, čak i uz minimalnu dozvoljenu razliku između ulaznog napona V IN i izlaznog V OUT jednaku 3 V, disipirati snagu od najmanje
P = (V IN - V OUT)×I = 3×1 = 3 W.
Stoga je potreban radijator. Opet se postavlja pitanje: kolika je disipacija snage? Na 3 W? Ali ne. Ako odvojite vrijeme da izračunate graf opterećenja IC-a u zavisnosti od izlaznog napona (ovo je lako učiniti u Excelu), onda ćemo to dobiti pod našim uvjetima maksimalna snaga na IC-u će se disipirati ne pri maksimalnom izlaznom naponu regulatora, već pri izlaznom naponu od 7,5 V (vidi sliku 3), i to će biti skoro 5,0 W!
Kao što vidite, rezultat je nešto što više nije jeftino, već vrlo glomazno. Dakle, ovaj pristup je prikladan samo za motore male snage s radnom strujom ne većom od 0,25 A. U ovom slučaju, snaga na upravljačkoj IC će biti na razini od 1,2 W, što će već biti prihvatljivo.
Izlaz je korištenje metode modulacije širine impulsa (PWM) za kontrolu. Zaista je najčešći. Njegova suština je dovođenje unipolarnih pravokutnih impulsa moduliranih po trajanju do motora. Prema teoriji signala, struktura takve sekvence ima konstantnu komponentu proporcionalnu omjeru τ/T, gdje je: τ trajanje impulsa, a T period sekvence. Ona je ta koja kontroliše brzinu motora, što je izdvaja kao integratora u ovom sistemu. Pošto izlazni stepen PWM regulatora radi u tasterski režim u pravilu mu nisu potrebni veliki radijatori za odvođenje topline, čak i uz relativno velike snage motora, a efikasnost takvog regulatora je neuporedivo veća od prethodnog. U nekim slučajevima moguće je koristiti step-down ili step-up DC/DC pretvarače, ali oni imaju niz ograničenja, na primjer, u smislu dubine regulacije izlaznog napona i minimalnog opterećenja. Stoga su, po pravilu, češća druga rješenja. „Klasični“ dizajn kola takvog regulatora prikazan je na slici 4. Koristi se kao gas (regulator) u profesionalni modelželjeznica.
Na prvom operacionom pojačalu je montiran generator, a na drugom komparator. Signal iz kondenzatora C1 se dovodi na ulaz komparatora, a podešavanjem praga odziva generira se signal pravougaonog oblika sa željenim odnosom τ/T (slika 5).
Opseg podešavanja se postavlja pomoću trim otpornika RV1 (brže) i RV3 (sporije), a samo podešavanje brzine vrši se otpornikom RV2 (brzina). Želio bih skrenuti pažnju čitateljima na činjenicu da sličan krug s greškama u vrijednostima razdjelnika koji postavlja prag komparatora kruži Internetom na forumima na ruskom jeziku. Motor se direktno kontroliše preko prekidača pomoću moćnog tranzistora sa efektom polja. Karakteristike ovog MOSFET tranzistora su visoka radna struja (30 A konstantna i do 120 A impulsna), ultra-niska otpornost otvorenog kanala (40 mOhm) i, stoga, minimalni gubici snage u otvorenom stanju.
Na šta prvo treba obratiti pažnju kada koristite takve šeme? Prvi je izvođenje kontrolnog kruga. Ovdje na dijagramu postoji mala greška (slika 4). Ako se s vremenom pojave problemi s pokretnim kontaktom promjenjivog otpornika, dobit ćemo potpuno, gotovo trenutno ubrzanje motora. Ovo može oštetiti naš uređaj. Šta je protivotrov? Instalirajte dodatni otpornik dovoljno visokog otpora, na primjer, 300 kOhm od pina 5 IC-a do zajednička žica. U tom slučaju, ako regulator pokvari, motor će se zaustaviti.
Drugi problem s takvim regulatorima je izlazni stupanj ili drajver motora. U takvim krugovima može se napraviti pomoću tranzistora s efektom polja i bipolarnih; ovi drugi su neuporedivo jeftiniji. Ali i u prvoj i u drugoj opciji potrebno je uzeti u obzir neke važne tačke. Za vožnju tranzistor sa efektom polja MOSFET tip zahtijeva punjenje i pražnjenje svog ulaznog kapaciteta, koji može iznositi hiljade pikofarada. Ako ne koristite otpornik u seriji sa kapijom (R6 na slici 4) ili je njegova vrijednost premala, onda relativno visoke frekvencije kontrolno op-amp može otkazati. Ako koristite R6 velike vrijednosti, tada će tranzistor duže ostati u aktivnoj zoni svoje prijenosne karakteristike i, stoga, imamo povećanje gubitaka i zagrijavanja prekidača.
Još jedna napomena o krugu na slici 4. Upotreba dodatne diode D2 nema smisla, jer struktura tranzistora BUZ11 već ima svoju internu brzu zaštitnu diodu sa najbolje karakteristike od predloženog. Dioda D1 je također očito suvišna, tranzistor BUZ11 dozvoljava napon gejt-izvor od ± 20 V, a nemogući su obrnuti polaritet u upravljačkom krugu s unipolarnim napajanjem, kao i naponi iznad 12 V.
Ako koristite bipolarni tranzistor, tada se pojavljuje problem generiranja dovoljne bazne struje. Kao što je poznato, za zasićenje ključa na bipolarni tranzistor njegova bazna struja mora biti najmanje 0,06 struje opterećenja. Jasno je da operativno pojačalo možda ne daje takvu struju. U tu svrhu, u suštinski sličnom regulatoru, koji se koristi, na primjer, u popularnom mini-graveru kompanije PT-5201, koristi se tranzistor, koji je Darlingtonovo kolo. Ovdje postoji zanimljiva stvar. Ovi mini graveri ponekad pokvare, ali ne zbog pregrijavanja tranzistora, kako bi se moglo pretpostaviti, već zbog pregrijavanja IC-a (maksimalno radna temperatura+70 °C) izlazni tranzistor (maksim dozvoljena temperatura+150 °C). U proizvodima koje je koristio autor članka, bio je pritisnut uz tijelo IC-a i stavljen na ljepilo, koje je nedopustivo zagrijalo IC i gotovo blokiralo hladnjak. Ako naiđete na takav dizajn, onda je bolje "odlijepiti" tranzistor od IC-a i saviti ga što je više moguće. Za ovo znanje, autor članka je nagrađen od strane Pro’sKit skupom alata. Kao što vidite, sve treba riješiti na sveobuhvatan način - pogledajte ne samo strujno kolo, već i obratite pažnju na dizajn regulatora u cjelini.
Ima ih još nekoliko zanimljive šeme jednostavniji PWM kontroleri. Na primjer, dva kruga pojedinačnih operacionih pojačala sa drajverom su objavljena u [