Ministerstvo školstva a vedy Ruskej federácie
Federálna štátna rozpočtová vzdelávacia inštitúcia
vyššie odborné vzdelanie
"Štátna univerzita južného Uralu"
Fakulta automobilov a traktorov
Katedra "prevádzky automobilovej dopravy"
Asynchrónny motor ABSTRAKT z disciplíny „Všeobecná elektrotechnika a elektronika“
Skontrolujte, či je Krymsky V.V./_______________20____.
Úvod. 4
Asynchrónne elektromotory. 5
Rotor vo veveričke. Rotor asynchrónneho stroja typu veverička 6
Skratované vinutie rotora, často nazývané „klietka vo veveričke“ kvôli vonkajšej podobnosti konštrukcie, pozostáva z medených alebo hliníkových tyčí, ktoré sú na koncoch skratované dvoma krúžkami. Tyče tohto vinutia sú vložené do drážok jadra rotora. V malých a stredný výkon Rotor sa zvyčajne vyrába naliatím roztavenej hliníkovej zliatiny do štrbín v jadre rotora. Spolu s klietkovými tyčami sú odliate skratovacie krúžky a koncové lopatky, ktoré vykonávajú samoodvetrávanie samotného rotora a odvetrávanie stroja ako celku. Vo vysokovýkonných strojoch je „klietka veveričky“ vyrobená z medených tyčí, ktorých konce sú zvarené do skratovacích krúžkov. 6
Spôsoby riadenia asynchrónneho motora. 6
Princíp činnosti asynchrónne elektromotory. 9
Sklzový rotor. 10
Fázový rotor má trojfázový (in všeobecný prípad- viacfázové) vinutie, zvyčajne zapojené do hviezdy a vyvedené na zberné krúžky, ktoré sa otáčajú s hriadeľom stroja. Pomocou kovovo-grafitových kefiek kĺzajúcich po týchto krúžkoch do obvodu vinutia rotora: 10
Spustenie asynchrónneho motora s vinutým rotorom. jedenásť
Spôsoby riadenia asynchrónneho motora. 12
Reostatická regulácia. 12
Základné poruchy asynchrónneho motora s vinutým rotorom 14
Záver 15
Referencie 16
Úvod.
Trojfázový asynchrónny elektromotor sa líši od jednofázového asynchrónneho motora tým, že jednofázové vinutie je umiestnené na jednofázovom motore, presnejšie na jeho statore, a nazýva sa hlavné vinutie alebo pracovné vinutie.
Konštrukcia rotora jednofázového motora je rovnaká ako u trojfázového asynchrónneho motora. Jednofázové asynchrónne elektromotory sú široko používané veľká sila- do 2 kW. V elektrických zariadeniach pre domácnosť sa používajú jednofázové asynchrónne elektromotory s výkonom do 500 W. Pre elektrické jednofázové asynchrónne motory neexistuje počiatočný (štartovací) krútiaci moment. Prečo je to tak, že keď je hlavné vinutie motora pripojené k sieti s jednou fázou, jeho rotor sa nemôže otáčať.
Na zabezpečenie spustenia jednofázového motora je na stator inštalované ďalšie vinutie - štartovacie vinutie. Je umiestnený pod uhlom 90 ° vzhľadom na hlavné vinutie a je zapojený do série s kondenzátorom alebo induktorom. Keď sú štartovacie a hlavné vinutia pripojené k sieti, magnetické toky, ktoré vytvárajú, vytvárajú rotujúce magnetické pole. Vďaka tomu sa objavuje v rotore indukovaný prúd. V dôsledku interakcie rotujúceho magnetického poľa vytvoreného prúdmi vo vinutiach statora a magnetické pole, vytvorený indukčným prúdom v rotore, sa rotor začne otáčať.
Keď sa rotor otáča, vytvára sa sklz, takže štartovacie vinutie v tomto prípade jednoducho nie je potrebné a je vypnuté zotrvačným (odstredivým) spínačom alebo špeciálnym relé. Trojfázový asynchrónny motor možno použiť aj ako jednofázový motor. Nevýhodou tejto metódy je však potreba použiť drahé veľké kondenzátory, pretože na každých 100 W výkonu je potrebný kondenzátor s kapacitou približne 10 μF.
Asynchrónne elektromotory.
V súčasnosti tvoria asynchrónne motory najmenej 80 % všetkých elektromotorov vyrábaných v priemysle. Patria sem aj trojfázové asynchrónne motory.
Trojfázové asynchrónne elektromotory sú široko používané v automatizačných a telemechanických zariadeniach, domácich a zdravotníckych zariadeniach, zariadeniach na záznam zvuku atď.
Asynchrónny stroj je elektrický stroj so striedavým prúdom, ktorého rýchlosť rotora sa nerovná (v režime motora menej) frekvencii otáčania magnetického poľa vytvoreného prúdom vinutia statora.
V mnohých krajinách sú komutátorové stroje tiež klasifikované ako asynchrónne stroje. V Rusku sa stroje, ktoré sú indukčné, začali nazývať asynchrónne stroje.
Asynchrónne stroje dnes tvoria väčšinu elektrických strojov. Používajú sa hlavne ako elektromotory a sú hlavnými meničmi elektrickej energie na mechanickú energiu.
Výhody asynchrónnych elektromotorov:
Široká distribúcia trojfázových asynchrónnych motorov sa vysvetľuje jednoduchosťou ich konštrukcie, prevádzkovou spoľahlivosťou, dobrými výkonnostnými vlastnosťami, nízkymi nákladmi a jednoduchou údržbou.
nedostatky:
1. Malý rozbehový moment.
2. Významné štartovací prúd.
Asynchrónny stroj má stator a rotor oddelené vzduchovou medzerou. Jeho aktívnymi časťami sú vinutia a magnetický obvod; všetky ostatné časti sú konštrukčné, poskytujú potrebnú pevnosť, tuhosť, chladenie, rotáciu atď.
Statorové vinutie je trojfázové (vo všeobecnosti viacfázové) vinutie, ktorého vodiče sú rovnomerne rozmiestnené po obvode statora a uložené vo fázach v drážkach s uhlovou vzdialenosťou 120 el. krupobitie Fázy vinutia statora sú zapojené podľa štandardné schémy„trojuholník“ alebo „hviezda“ a pripojte sa k sieti s trojfázovým prúdom. Magnetický obvod statora je v procese zmeny (rotácie) magnetického toku budiaceho vinutia remagnetizovaný, preto je vyrobený z laminovanej (doskami) z elektroocele, aby boli zaistené minimálne magnetické straty.
Na základe konštrukcie rotora sú asynchrónne stroje rozdelené do dvoch hlavných typov: s skratovaný rotor a s fáza rotor. Oba typy majú rovnakú konštrukciu statora a líšia sa len prevedením vinutia rotora. Magnetický obvod rotora je vyrobený podobne ako magnetický obvod statora - vyrobený z elektroocele a laminovaný.
Rotor vo veveričke. Rotor asynchrónneho stroja typu veverička.
Skratované vinutie rotora, často nazývané „klietka vo veveričke“ kvôli vonkajšej podobnosti konštrukcie, pozostáva z medených alebo hliníkových tyčí, ktoré sú na koncoch skratované dvoma krúžkami. Tyče tohto vinutia sú vložené do drážok jadra rotora. V strojoch s malým a stredným výkonom sa rotor zvyčajne vyrába naliatím roztavenej hliníkovej zliatiny do štrbín jadra rotora. Spolu s klietkovými tyčami sú odliate skratovacie krúžky a koncové lopatky, ktoré vykonávajú samoodvetrávanie samotného rotora a odvetrávanie stroja ako celku. Vo vysokovýkonných strojoch je „klietka veveričky“ vyrobená z medených tyčí, ktorých konce sú zvarené do skratovacích krúžkov.
Drážky rotora alebo statora sú často vyrobené skosené, aby sa znížilo vyššie harmonické EMF spôsobené pulzáciami magnetického toku v dôsledku prítomnosti zubov, ktorých magnetický odpor je výrazne nižší ako magnetický odpor vinutia, ako aj na zníženie hluk spôsobený magnetickými dôvodmi. Na zlepšenie štartovacích charakteristík asynchrónneho elektromotora s rotorom vo veveričke, konkrétne na zvýšenie štartovacieho momentu a zníženie štartovacieho prúdu, sa na rotore používa špeciálny tvar drážky. V tomto prípade má časť drážky rotora vonkajšia k osi otáčania menší prierez ako vnútorný. To umožňuje využiť efekt prúdového posunu, vďaka ktorému sa pri veľkých sklzoch (pri rozbehu) zvyšuje aktívny odpor vinutia rotora.
Asynchrónne motory s rotor vo veveričke majú malý rozbehový moment a významný rozbehový prúd, čo je významná nevýhoda „klietky veveričky“. Preto sa používajú v tých elektrických pohonoch, kde nie sú potrebné veľké rozbehové momenty. Medzi výhody patrí jednoduchosť výroby a absencia mechanického kontaktu so statickou časťou stroja, čo zaručuje odolnosť a znižuje náklady na údržbu. Pri špeciálnej konštrukcii rotora, keď magnetický obvod „rotora“ zostáva nehybný a v magnetickej medzere sa otáča iba dutý hliníkový valec (klietka nakrátko alebo skratované vinutie rotora), je možné dosiahnuť nízku zotrvačnosť motora.
Konštrukcia asynchrónnych elektromotorov s vinutým rotorom.
Hlavnými časťami akéhokoľvek asynchrónneho motora sú stacionárna časť - stator a rotačná časť, nazývaná rotor.
Stator trojfázového asynchrónneho motora pozostáva z vrstveného magnetického jadra zalisovaného do liateho rámu. Na vnútornom povrchu magnetického jadra sú drážky na uloženie vodičov vinutia. Tieto vodiče sú stranami viacotáčkových mäkkých cievok, ktoré tvoria tri fázy vinutia statora. Geometrické osi cievok sú vzájomne posunuté v priestore o 120 stupňov.
Fázy vinutia môžu byť zapojené do hviezdy alebo trojuholníka v závislosti od sieťového napätia. Napríklad, ak údajový list motora uvádza napätia 220/380 V, potom pri sieťovom napätí 380 V sú fázy zapojené do hviezdy. Ak je sieťové napätie 220 V, potom sú vinutia spojené v „trojuholníku“. V oboch prípadoch fázové napätie motor je 220V.
Rotor trojfázového asynchrónneho motora je valec vyrobený z lisovaných plechov z elektroocele a namontovaný na hriadeli. V závislosti od typu vinutia sú rotory trojfázových asynchrónnych motorov rozdelené na klietkové a fázové.
Dolivo-Dobrovolsky bol prvý, kto vytvoril motor s rotorom vo veveričke a študoval jeho vlastnosti. Zistil, že takéto motory majú veľmi vážnu nevýhodu – obmedzený rozbehový krútiaci moment. Dolivo-Dobrovolsky pomenoval dôvod tohto nedostatku - silne skratovaný rotor. Navrhol aj návrh motora s vinutým rotorom.
Na obr. znázorňuje pohľad v reze na asynchrónny stroj s navinutým rotorom: 1 - rám, 2 - vinutie statora, 3 - rotor, 4 - zberacie krúžky, 5 - kefy.
V navinutom rotore je vinutie trojfázové, podobne ako vinutie statora, s rovnakým počtom pólových párov. Závity vinutia sú umiestnené v drážkach jadra rotora a sú spojené hviezdicovým vzorom. Konce každej fázy sú spojené so zbernými krúžkami upevnenými na hriadeli rotora a sú vyvedené do vonkajšieho okruhu cez kefy. Klzné krúžky sú vyrobené z mosadze alebo ocele a musia byť izolované od seba a od hriadeľa. Ako kefy sa používajú kovovo-grafitové kefy, ktoré sú pritláčané na zberné krúžky pomocou pružín držiaka kief pevne upevnených v tele stroja. Na obr. Je uvedený symbol pre asynchrónny motor s rotorom nakrátko (a) a fázovo vinutým (b).

V asynchrónnych elektromotoroch vyšších výkonov a špeciálnych strojoch s malým výkonom sa na zlepšenie štartovacích a riadiacich vlastností používajú fázové rotory. V týchto prípadoch je na rotore umiestnené trojfázové vinutie s geometrickými osami fázových cievok (1), posunutými v priestore voči sebe o 120 stupňov.
Fázy vinutia sú spojené hviezdicou a ich konce sú spojené s tromi zbernými krúžkami (3), namontovanými na hriadeli (2) a elektricky oddelenými ako od hriadeľa, tak aj od seba navzájom. Pomocou kief (4), ktoré sú v klznom kontakte s krúžkami (3), je možné do obvodov fázového vinutia zaradiť nastavovacie reostaty (5).
Asynchrónny motor s vinutým rotorom má lepšie štartovacie a riadiace vlastnosti, ale vyznačuje sa väčšou hmotnosťou, rozmermi a nákladmi ako asynchrónny motor s rotorom nakrátko.
Princíp činnosti asynchrónnych elektromotorov.
Princíp činnosti asynchrónneho stroja je založený na použití rotujúceho magnetického poľa. Pri zapojení trojfázového statorového vinutia do siete vzniká rotujúce magnetické pole, ktorého uhlová rýchlosť je určená sieťovou frekvenciou f a počtom pólových párov vinutia p, t.j. ω1=2πf/p
Prechádzajúc cez vodiče vinutia statora a rotora toto pole indukuje EMF vo vinutí (podľa zákona elektromagnetickej indukcie). Keď je vinutie rotora zatvorené, jeho EMF indukuje prúd v obvode rotora. V dôsledku interakcie prúdu s výsledným magnetickým poľom vzniká elektromagnetický krútiaci moment. Ak tento moment prekročí moment odporu na hriadeli motora, hriadeľ sa začne otáčať a poháňať pracovný mechanizmus. Zvyčajne sa uhlová rýchlosť rotora ω2 nerovná uhlovej rýchlosti magnetického poľa ω1, nazývanej synchrónne. Preto je názov motora asynchrónny, t.j. nesynchrónne.
Prevádzka asynchrónneho stroja je charakterizovaná sklzom s, čo je relatívny rozdiel uhlové rýchlosti pole ω1 a rotor ω2: s= (ω1-ω2) /ω1

Hodnota a znamienko sklzu v závislosti od uhlovej rýchlosti rotora voči magnetickému poľu určuje prevádzkový režim asynchrónneho stroja. V ideálnom režime naprázdno sa teda rotor a magnetické pole otáčajú rovnakou frekvenciou v rovnakom smere, sklz s = 0, rotor je stacionárny voči rotujúcemu magnetickému poľu, EMF v jeho vinutí sa neindukuje, prúd rotora a elektromagnetický krútiaci moment stroja sú nulové. Pri štartovaní je rotor v prvom okamihu nehybný: ω2=0, s=1. Vo všeobecnosti sa sklz v režime motora mení od s=1 pri štarte do s=0 v ideálnom režime nečinnosti.
Keď sa rotor otáča rýchlosťou ω2>ω1 v smere otáčania magnetického poľa, sklz bude záporný. Stroj prejde do režimu generátora a vyvinie brzdný moment. Keď sa rotor otáča v smere opačnom ako je smer otáčania magnetického poľa (s>1), asynchrónny stroj prejde do režimu protispínania a tiež vyvinie brzdný moment. V závislosti od sklzu sa teda rozlišujú režimy motora (s=1÷0), generátora (s=0÷-∞) a režimu protispínania (s=1÷+∞). Na brzdenie asynchrónnych motorov sa používajú režimy generátor a spätné vypnutie.
Sklzový rotor.
Fázový rotor má trojfázové (vo všeobecnosti viacfázové) vinutie, zvyčajne zapojené do hviezdy a pripojené k zberným krúžkom, ktoré sa otáčajú s hriadeľom stroja. Pomocou kovovo-grafitových kefiek, ktoré sa posúvajú po týchto krúžkoch do obvodu vinutia rotora:
zahŕňajú balastný reostat, ktorý pôsobí ako dodatočný aktívny odpor, rovnaký pre každú fázu. Znížením rozbehového prúdu dosahujú zvýšenie rozbehového momentu na maximálnu hodnotu (v prvom momente). Takéto motory sa používajú na pohon mechanizmov, ktoré pracujú pri veľkom zaťažení alebo vyžadujú plynulé riadenie rýchlosti.
zahŕňajú indukčnosti (tlmivky) v každej fáze rotora. Odpor tlmiviek závisí od frekvencie pretekajúceho prúdu a ako je známe, v rotore v prvom momente rozbehu je frekvencia kĺzavých prúdov najvyššia. Ako sa rotor otáča, frekvencia indukovaných prúdov klesá a spolu s tým klesá aj odpor induktora. Indukčná reaktancia v obvode navinutého rotora vám umožňuje automatizovať postup štartovania motora a v prípade potreby „nabrať“ motor, ktorého otáčky klesli v dôsledku preťaženia. Indukčnosť udržuje prúdy rotora na konštantnej úrovni.
zahrnúť zdroj priamy prúd, čím sa získa synchrónny stroj.
zahŕňajú výkon z meniča, ktorý vám umožňuje ovládať charakteristiku otáčok a krútiaceho momentu motora. Ide o špeciálny prevádzkový režim (stroj s dvojitým výkonom). Sieťové napätie je možné zapnúť bez meniča, s fázou opačnou, ako je napájaný stator.
Spustenie asynchrónneho motora s vinutým rotorom.
Štartovacie podmienky asynchrónneho motora s fázovým vinutím rotora možno výrazne zlepšiť za cenu určitých komplikácií pri návrhu a údržbe motora.
Pretože Pretože aktívny odpor fázového vinutia rotora je relatívne malý, na dosiahnutie maximálneho počiatočného rozbehového momentu je potrebné zahrnúť do obvodu rotora štartovací reostat s fázovým odporom.
Akonáhle sa rotor začne otáčať, sklz sa zníži a spolu s ním aj EMF a prúd rotora, v dôsledku čoho sa krútiaci moment zníži. Aby motor pokračoval vo vývoji krútiaceho momentu blízko maxima, treba postupne znižovať odpor štartovacieho reostatu. Nakoniec, keď motor dosiahne svoje menovité otáčky, štartovací reostat je skratovaný.
Na zníženie mechanických strát a opotrebovania krúžkov a kefiek sú motory niekedy vybavené zariadením na zdvíhanie kief a skratovanie krúžkov.
Čím väčší by mal byť počiatočný krútiaci moment, tým bližšie je k maximálnemu krútiacemu momentu, tým väčší bude štartovací prúd. Z tohto dôvodu, len pre obzvlášť ťažké štartovacie podmienky, je reostat zvolený tak, aby sa štartovací moment rovnal maximu.
Aby sa zabezpečilo, že sa štartovací reostat počas štartovacieho času neprehreje, jeho výkon by mal byť približne rovnaký ako výkon motora. Pre vysokovýkonné motory sa štartovacie reostaty vyrábajú s olejovým chladením.
Samozrejme, použitie štartovacieho reostatu výrazne zlepšuje štartovacie podmienky asynchrónneho motora, zvyšuje štartovací moment a znižuje štartovací prúd.
Spôsoby riadenia asynchrónneho motora.
Poháňaný asynchrónnym motorom striedavý prúd sa týka zmeny rýchlosti rotora a/alebo jeho krútiaceho momentu. Existujú nasledujúce spôsoby ovládania asynchrónneho motora:
reostat - zmena rýchlosti otáčania IM s navinutým rotorom zmenou odporu reostatu v obvode rotora, navyše sa tým zvyšuje rozbehový moment;
frekvencia - zmena frekvencie otáčania MV zmenou frekvencie prúdu v napájacej sieti, čo má za následok zmenu frekvencie otáčania statorového poľa. Motor sa zapína cez frekvenčný menič
prepnutie vinutí z okruhu „hviezda“ do okruhu „trojuholníka“ počas procesu štartovania motora, čím sa znížia štartovacie prúdy vo vinutiach približne trojnásobne, ale zároveň sa zníži aj krútiaci moment;
impulzné - dodávaním špeciálneho typu napájacieho napätia (napríklad pílovité);
zavedenie dodatočných e. d. s v súlade s frekvenciou sklzu alebo v opačnom smere sekundárny okruh.
zmena počtu pólových párov, ak je takéto prepínanie štrukturálne zabezpečené (len pre rotory nakrátko);
zmena amplitúdy napájacieho napätia, kedy sa mení len amplitúda (alebo efektívna hodnota) riadiaceho napätia. Potom vektory riadiaceho a budiaceho napätia zostanú kolmé (spustenie autotransformátora);
fázové riadenie sa vyznačuje tým, že zmena otáčok rotora sa dosiahne zmenou fázového posunu medzi vektormi budiaceho a riadiaceho napätia;
metóda amplitúdovej fázy zahŕňa dve opísané metódy;
zahrnutie do výkonového okruhu statora reaktora;
indukčná reaktancia pre motor s vinutým rotorom.
Regulácia reostatu.
V trojfázových asynchrónnych motoroch s vinutým rotorom sa na reguláciu otáčok rotora používa metóda reostatu. To sa dosiahne zavedením nastaviteľného trojfázového reostatu do obvodu fázových vinutí rotora, ako pri štartovaní motora. Ale tento reostat musí byť navrhnutý pre dlhodobé zaťaženie rotorový prúd, a nie krátkodobý, ako štartovací reostat. Zvyšovaním aktívneho odporu obvodu rotora sa mení charakteristika M BP (s) - robí to mäkšie. Ak sa pri konštantnom krútiacom momente na hriadeli motora zvyšuje aktívny odpor obvodu rotora postupným zvyšovaním odporu reostatu ( r p 1 < r p 2 < r p 3 ), potom bude mať pracovný bod jednu krivku M BP (s) k ďalšiemu, čo zodpovedá zvýšenému odporu obvodu rotora, sa sklz zvyšuje a v dôsledku toho sa otáčky motora znižujú. Týmto spôsobom môžete meniť otáčky rotora v rozsahu od nominálnej až po úplné zastavenie. Nevýhodou tohto spôsobu regulácie sú pomerne veľké straty energie.
Základné poruchy asynchrónneho motora s vinutým rotorom
|
Porucha |
Možný dôvod |
|
Nevyvíja menovité otáčky a hučí |
Jednostranné priťahovanie rotora v dôsledku: a) opotrebovania ložísk; b) nesúosovosť ložiskových štítov; c) ohýbanie hriadeľa |
|
Zle vyvíja rýchlosť a hučí, prúd vo všetkých troch fázach je iný a dokonca zapnutý Voľnobeh presahuje nominálne |
1. Vinutia sú nesprávne pripojené a jedna z fáz je „hore nohami“ 2. Tyč vinutia rotora je roztrhnutá |
|
Rotor sa neotáča alebo sa otáča pomaly, motor bzučí |
Fáza vinutia statora je prerušená |
|
Celé auto vibruje |
1. Je narušené centrovanie polovíc spojky alebo súososť hriadeľov 2. Rotor, remenica a polovice spojky sú nevyvážené |
|
Vibrácie zmiznú po odpojení od siete, prúd vo fázach statora sa stane nerovnomerným, jedna zo sekcií vinutia statora sa rýchlo zahreje |
Skrat vo vinutí statora |
|
Prehrieva sa pri menovitom preťažení |
1. Zapnite skrat vo vinutí statora 2. Znečistenie vinutia alebo vetracích kanálov |
|
Nízky odpor |
1. Vlhkosť alebo znečistenie vinutia 2. Starnutie izolácie |
Záver
Trojfázové asynchrónne elektromotory s rotorom vo veveričke sú široko používané národného hospodárstva Takéto motory však majú množstvo nevýhod: chýba plynulá regulácia otáčok, vysoký štartovací prúd atď. Ale toto všetko sa dá obísť, ak namiesto rotora použijete vinutý rotor.
Fázový rotor je usporiadaný správnym spôsobom: trojfázové vinutie je umiestnené v drážkach rotora (vinutie je podobné vinutiu statora); fázy vinutia rotora sú spojené hviezdou; začiatky fáz sú spojené s tromi kontaktnými krúžkami vyrobenými z mosadze alebo medi, ktoré sú zase namontované na rovnakom hriadeli s rotorom. V súlade s tým sú zberné krúžky izolované od seba a od hriadeľa. Kovovo-grafitové alebo uhlíkové kefky namontované na držiaku kefky namontovanom na ložiskovom štíte sú dobre pritlačené ku kontaktným krúžkom.
Na spustenie motora s vinutým rotorom sú kefy pripojené k riadiacim alebo štartovacím reostatom. Tieto isté reostaty umožňujú znížiť štartovací prúd, pretože vďaka nim sa zvyšuje celkový odpor vinutia rotora.
Reostaty slúžia na plynulé ovládanie otáčok motora, ako aj na zmenu iných prevádzkových charakteristík.
Bibliografia
1. Dizajn elektrických strojov: Učebnica pre vysoké školy Kniha 1. Spracoval Kopylov I.P. Moskva: Energoatomizdat 1993. - 464 s.
2. Elektrické stroje: Asynchrónne stroje: Učebnica. Pre elektromech. špecialista. Univerzity / Radin V.I., Bruskin D.E., Zorohovich A.E.; Ed. I.P. Kopylov-M.: Vyššia škola, 1988, -328 s.
Kuznecov M.I. Základy elektrotechniky. Návod. Ed. 10., revidované "graduálna škola"
Asynchrónny motor s rotorom nakrátko (AM S KZR)
Zariadenia, ktoré premieňajú elektrickú energiu (vstup) na mechanickú energiu (výstup), sa nazývajú elektromotory .
Mechanická energia je nevyhnutná pre chod výrobných strojov a mechanizmov.
krvný tlak pozostáva pozostáva zo statora (pevná časť) a rotora (pohyblivá časť).
Stator obsahuje: puzdro; magnetický obvod (jadro) pozostávajúci z tenkých oceľových platní; tri vinutia (cievky), vzájomne posunuté o 120°, ktoré zapadajú do drážok magnetického jadra.
Rotor obsahuje: hriadeľ, magnetický obvod, skratované (vo forme klietky nakrátko) vinutie.
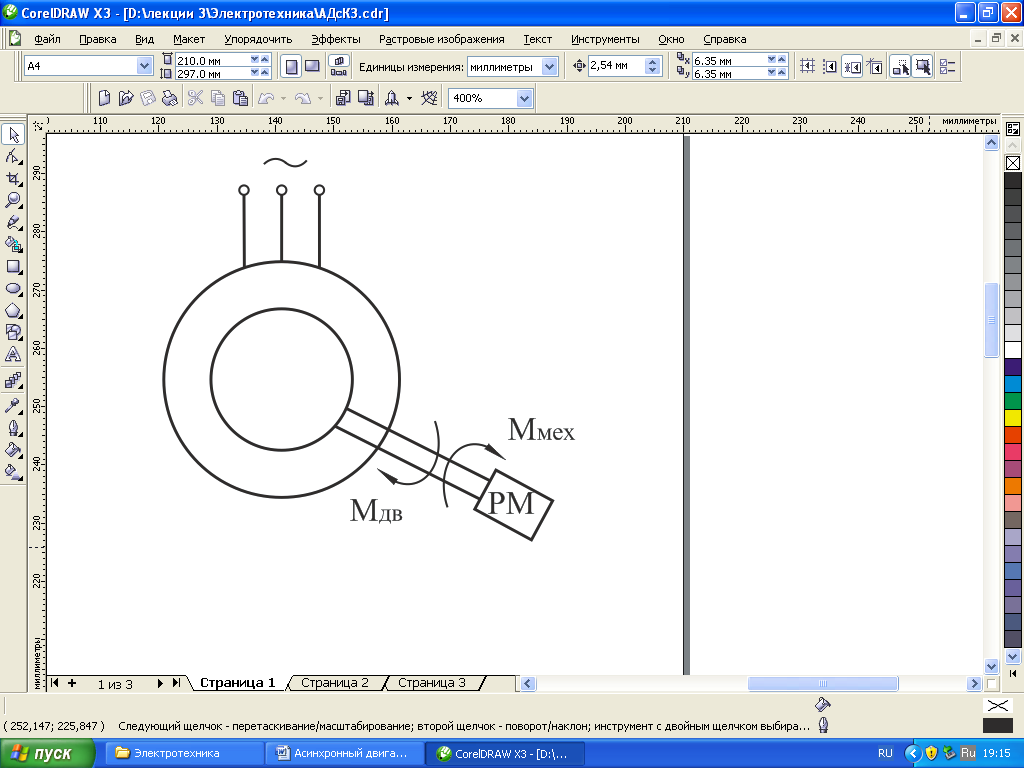
Symbol
K rotoru je pripojený výrobný mechanizmus, ktorý pôsobí ako záťaž na motor.
Výhody motora: jednoduché, lacné, spoľahlivé.
nedostatky: zlé štartovacie vlastnosti, t.j. nízky štartovací moment, vysoký štartovací prúd, ako aj jalový odber prúdu zo siete.
PRINCÍP PREVÁDZKY
U 1 → ja 1 → F 1 (rotujúce magnetické pole)→ E 2 (E 1 ) → ja 2
V dôsledku interakcie I 2 s Ф vzniká moment M [Nm]
M = TOja 2 F cosψ 2,
kde ψ 2 je fázový posun medzi E 2 a I 2, pod vplyvom ktorého sa rotor začína otáčať.
V IM je ASYNCHRONICITA (nerovnomernosť) rotácie magnetického poľa n 1 a rotora n 2. V dôsledku tohto asynchrónneho pohybu prebiehajú v rotore elektrické procesy (E 2 a I 2). Množstvo asynchrónie sa odhaduje posúvaním S v relatívnych jednotkách alebo percentách:
![]() ,
[%],
,
[%],
n 1 - frekvencia otáčania magnetického poľa.
P p - počet párov magnetické póly polia: 1, 2, 3... atď.;
f je aktuálna frekvencia.
Ak f nom = 50 Hz, potom = 3 000, 1 500, 1 000 ot./min. atď., v závislosti od počtu párov pólov motora.
Od (1) máme ![]() .
.
Prevádzka motora začína od n 2 = 0 (štart), potom
(maximálny sklz).
Teoreticky je maximálna rýchlosť rotora pri bez zaťaženia n 2 = n 1, potom
Rozsah zmien v S bol od 1 (minimálna rýchlosť rotora) do 0 (maximálna rýchlosť rotora).
MECHANICKÁ CHARAKTERISTIKA PEKLA - hlavná charakteristika IM, ktorá ukazuje, ako sa mení rýchlosť rotora pod vplyvom zaťaženia. Túto charakteristiku možno získať operatívne alebo výpočtom pomocou vzorcov:
 (1)
(1)
Zadaním S vo vzorcoch (1) a (2) môžete nájsť n.
Zadaním zaťaženia M môžete nájsť sklz a následne n 2.
Táto mechanická charakteristika má tvar:
|
|
|

Vo vlastnostiach môžeme vyzdvihnúť 4 hlavné body a podľa toho 3 pozemky. Zvážte tieto body:
1 - voľnobežné otáčky (motor sa otáča bez zaťaženia).
Súradnice tohto bodu (n 2 = n 1, M=0);
2 - nominálny režim - sa vyskytuje pri zaťažení rovnajúcom sa maximálnemu prípustnému za podmienok dlhodobej prevádzky.
Súradnice tohto bodu (n 2 = n nom, M = M nom) sú uvedené v pase;
3 - kritické zaťaženie, pri ktorom motor vyvinie maximálny krútiaci moment.
Súradnice tohto bodu (S cr alebo n cr; M = M max = M cr).
Keď je zaťaženie väčšie ako kritické, motor sa s ním nedokáže vyrovnať, čo vedie k zastaveniu;
4 - od tohto bodu štartuje motor.
Súradnice tohto bodu (n 2 = 0, M = M n)
Všetky súradnice možno zistiť z údajov z pasu motora.
Stránky 1-3 - stabilná prevádzka, keď je zaťaženie motora od 0 do Mcr, motor má schopnosť prispôsobiť sa zaťaženiu a zvýšiť svoj krútiaci moment (sila), čo nevedie k zastaveniu motora.
3-4 - charakterizuje nábeh motora v tejto oblasti je nestabilný;
kde:
1-2 - je možná dlhodobá prevádzka, pri ktorej prúd spotrebovaný zo siete nepresahuje maximálne prípustné, t.j.
2-3 - prípustná je len krátkodobá prevádzka, pretože pri takomto zaťažení motora > I nom a prehriatiu motora je možné.
MECHANICKÉ VLASTNOSTI n=f(M), získané za nominálnych prevádzkových podmienok, t.j. pri U=U nom, f=f nom a prírodný vzor inklúzie (bez prídavných prvkov) sa nazýva PRIRODZENÝ.
REGULÁCIA RÝCHLOSTI BP S KZR
Ako vyplýva zo vzorca
![]()
frekvenciu otáčania možno ovplyvniť zmenou frekvencie otáčania magnetického poľa
Zmenou frekvencie napájacieho napätia f 1 (pomocou špeciálnych meničov) alebo zmenou počtu pólových párov P p (zmenou obvodu statorových cievok).
V oboch prípadoch zostáva výška sklzu prakticky nezmenená.
Taktiež je možné meniť otáčky motora ovplyvňovaním sklzu S. To je možné uskutočniť zmenou napätia napájajúceho motor, alebo zmenou odporu rotora (ak to umožňuje konštrukcia rotora).
MECHANICKÉ VLASTNOSTI, získaný za prevádzkových podmienok odlišných od nominálnych, sa nazýva UMELÝ.
Zvážme tieto metódy.
VPLYV FREKVENCIEfPRI OTÁČKÁCH MOTORA
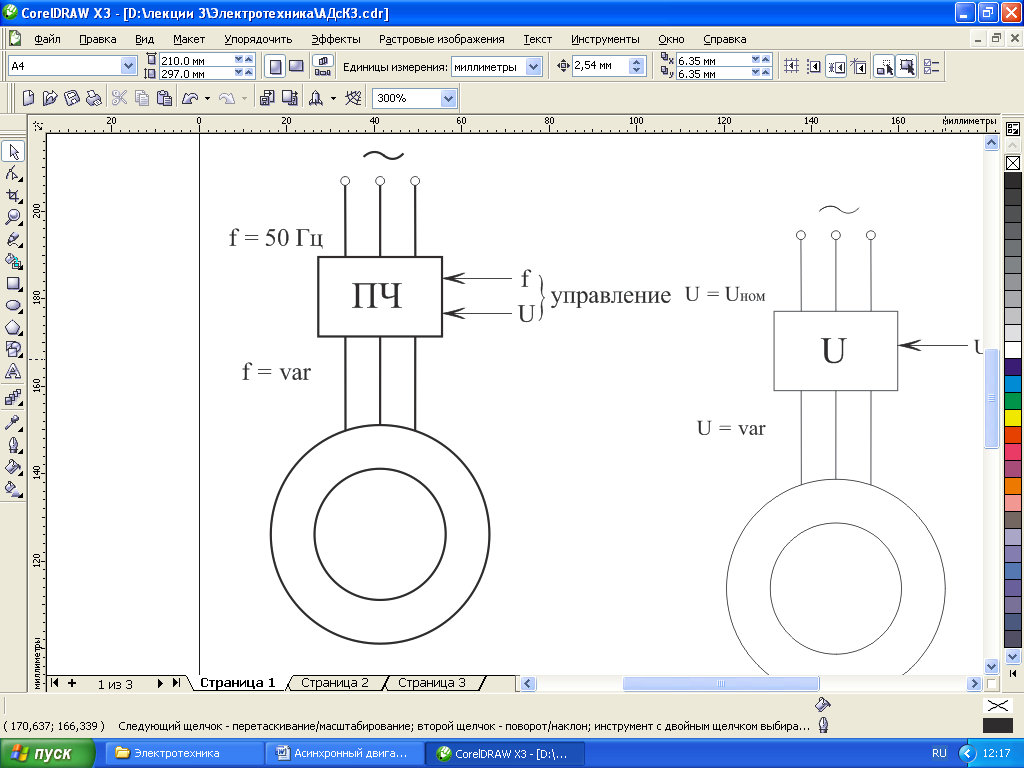
Z teórie strojov je známe, že na zabezpečenie efektívnej prevádzky motora s reguláciou frekvencie je potrebné meniť privádzané napätie so zmenou f tak, aby pomer U/f zostal konštantný. Je zrejmé, že táto podmienka môže byť splnená iba znížením f<50 Гц, потому что уменьшение напряжения U
So zvýšením f>50 Hz by sa malo úmerne zvýšiť napätie U>U nom, čo však nie je prípustné vzhľadom na prevádzkové podmienky motora. Táto okolnosť sa prejaví vo forme mechanických vlastností.
Všimnite si, že v každom prípade, keď sa zmení f, zmení sa aj frekvencia rotácie magnetického poľa (t. j. poloha bodu n 1 na mechanickej charakteristike). Poloha bodu n 1 teda môže byť vodítkom pri zobrazovaní umelých mechanických charakteristík.

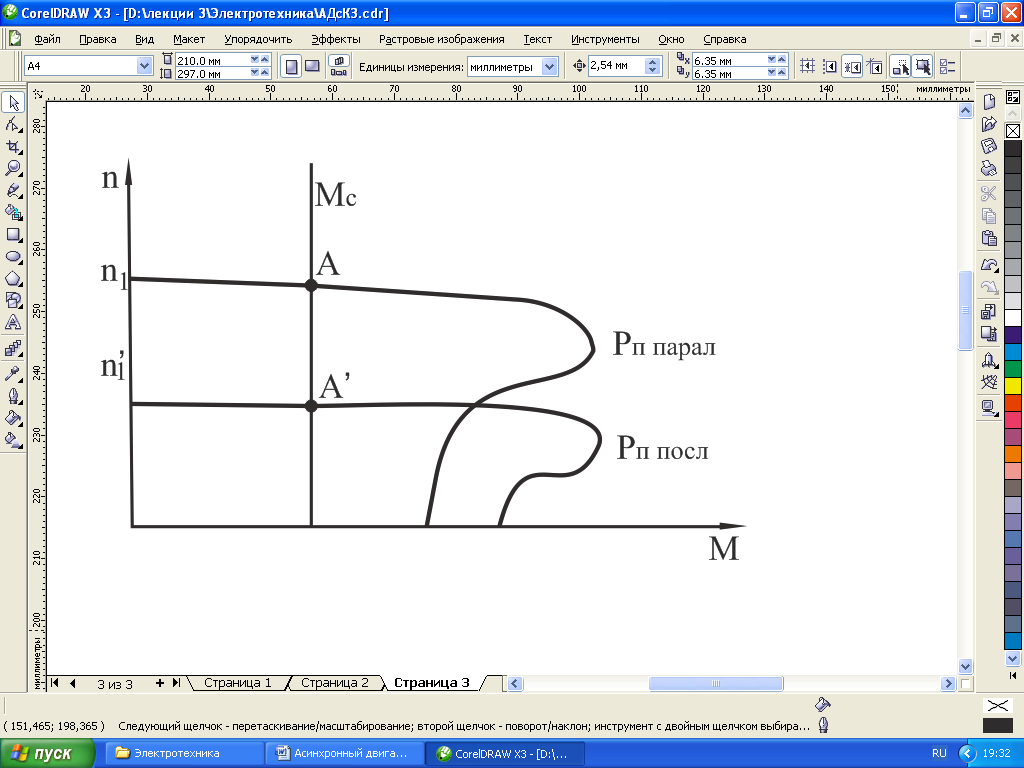
Ak uvedieme mechanické charakteristiky mechanických charakteristík mechanizmu (nech M c = const, kde M c je moment odporu), potom môžeme odhadnúť rozsah regulácie otáčok pre reguláciu frekvencie, kde A, A", A" sú pracovné body získané za podmienky M dv = M s.
Výhody frekvenčnej metódy regulácie rýchlosti krvného tlaku: plynulosť regulácie: plynulou zmenou f dostaneme veľké množstvo umelé vlastnosti a následne aj rýchlosti; veľký rozsah s nastavením hore aj dole od nominálnej (dvojzónová regulácia).
Nedostatky: nutnosť inštalácie frekvenčného meniča, čo výrazne zvyšuje náklady na elektrický pohon.
OVLÁDANIE POLE poskytuje možnosť zmeny počtu párov pólov P p Tento spôsob je možný len pri špeciálnych - viacrýchlostných, asynchrónnych motoroch a dosahuje sa spínaním jednotlivých sekcií, ktoré tvoria cievku statora (vinutie) zo sériového zapojenia. k paralelnému alebo naopak a počet pólových párov pri sériovom zapojení je 2-krát väčší ako pri paralelnom zapojení, teda P p sériovom. =2P p paralelne. a následne, ![]() .
.
Je zrejmé, že poloha bodu n 1 na mechanickej charakteristike sa zmení dvakrát.
Výhody pólovej regulácie: jednoduchosť implementácie, absencia špeciálnych konvertorových zariadení v napájacom obvode motora.
Nedostatky: stupňovitá regulácia, malý rozsah regulácie.
OVLÁDANIE RÝCHLOSTI ZMENOU NAPÁJACIEHO NAPÄTIAU
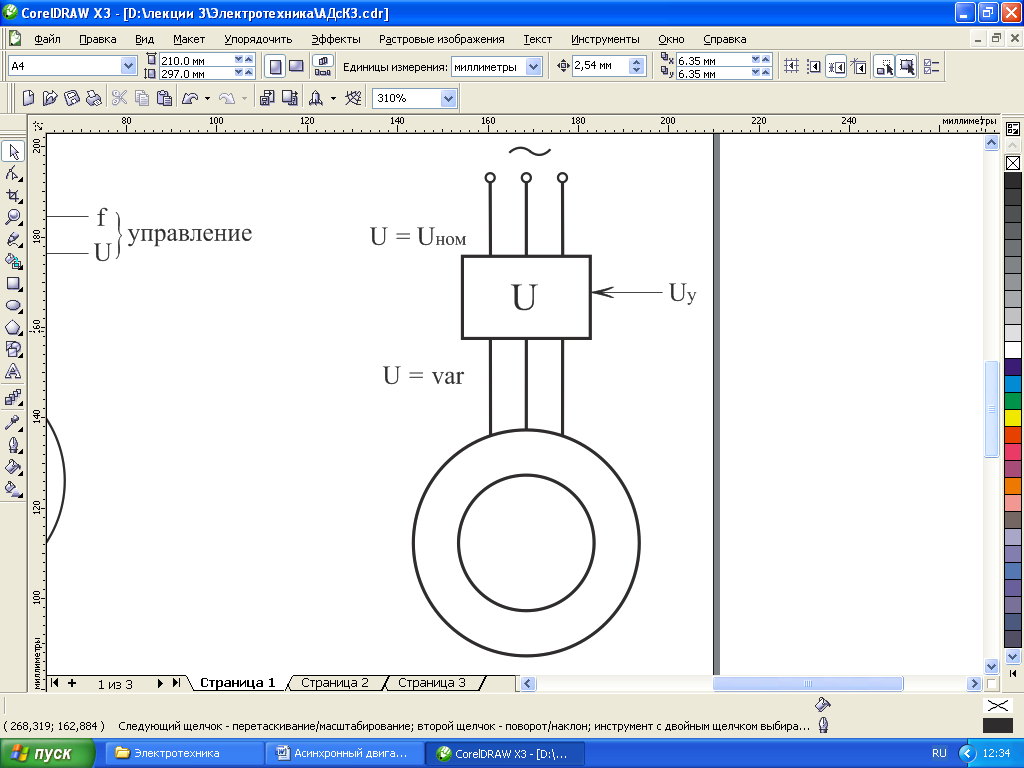
Pri tejto metóde zostáva frekvencia otáčania magnetického poľa () konštantná a frekvencia otáčania rotora sa mení v dôsledku kĺzania. To možno vysvetliť skutočnosťou, že s poklesom napájacieho napätia sa M motora výrazne znižuje (kvadratická závislosť), čo pri rovnakom zaťažení vedie k zníženiu rýchlosti a následne k sklzu. Pri konštrukcii umelých mechanických charakteristík vychádzame zo skutočnosti, že bod n 1, zodpovedajúci frekvencii otáčania magnetického poľa, sa nezmení, napätie U sa môže meniť iba smerom k poklesu a tým aj momenty M p a M max sa zníži, pretože M~ U2.
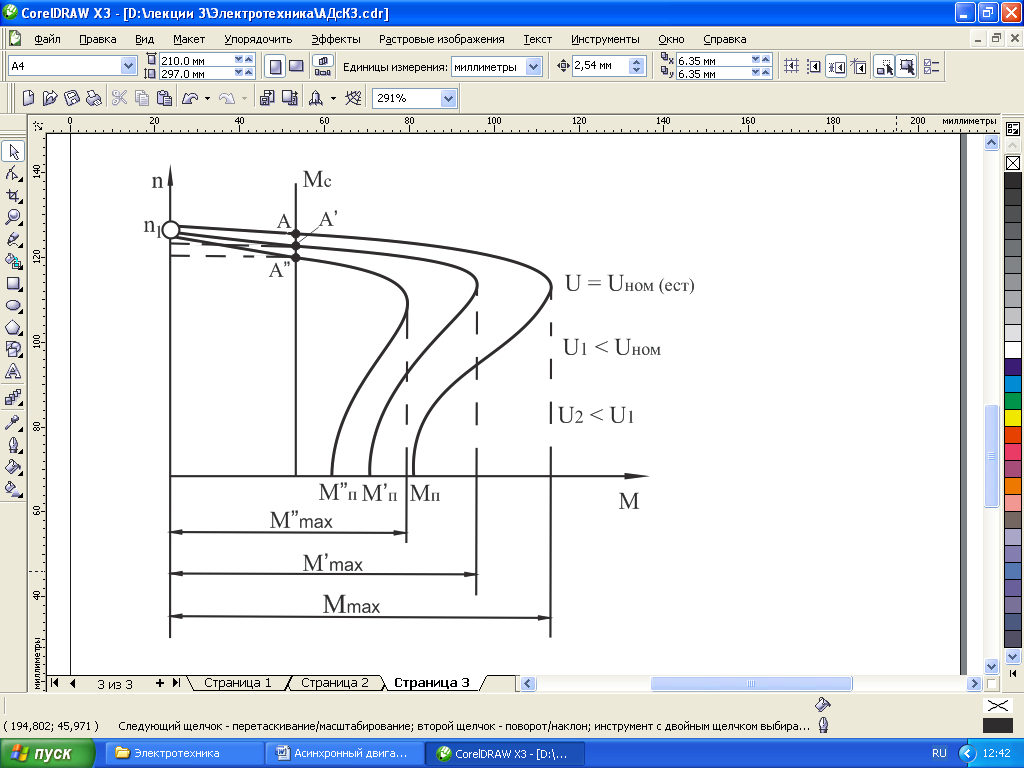
Chyba: malý rozsah regulácie rýchlosti (odhady rýchlosti pri práci v bodoch A, A, A“). Preto túto metódu regulácia sa používa zriedka.
Prednášky o elektrické stroje
Asynchrónny motor s rotorom vo veveričke (obr. 249 a 250) pozostáva z týchto hlavných častí: stator s trojfázovým vinutím, rotor vo veveričke a kostra. Vinutie rotora je vyrobený bezkontaktne (nie je napojený na žiadny vonkajší obvod), čo určuje vysoká spoľahlivosť takýto motor.
Magnetický systém.Asynchrónny stroj Na rozdiel od jednosmerného stroja nemá výrazné póly. Takýto magnetický systém je tzv nevystupujúci pól. Počet pólov v stroji je určený počtom cievok vo vinutí statora a ich schémou zapojenia. V štvorpólovom stroji (obr. 251) sa magnetický systém skladá zo štyroch rovnakých vetiev, cez každú prechádza polovica magnetického toku Ф p jedného pólu v dvojpólovom stroji sú dve takéto vetvy, v šesťpólový stroj - šesť atď. Pretože všetky prvky magnetického systému prechádzajú striedavým magnetickým tokom, potom nielen rotor 1, ale
Ryža. 249. Asynchrónny motor s rotorom nakrátko: 1 - rám; 2 - stator; 3 - rotor; 4 - tyče vinutia rotora; 5 - ložiskový štít; 6 - lopatky ventilačného rotora; 7 - ventilátor; 8 - svorkovnica
 Ryža. 250. Elektrická schéma asynchrónny motor s rotorom nakrátko (a) a jeho podmienený grafický obrázok(b): 1 - stator; 2 - rotor
Ryža. 250. Elektrická schéma asynchrónny motor s rotorom nakrátko (a) a jeho podmienený grafický obrázok(b): 1 - stator; 2 - rotor
 Obr.251. Magnetické pole štvorpólového asynchrónneho stroja
Obr.251. Magnetické pole štvorpólového asynchrónneho stroja
 Ryža. 252. Plechy rotora (a) a statora (b)
Ryža. 252. Plechy rotora (a) a statora (b)
 Ryža. 253. Balenie zmontovaného statora (a) a statora s vinutím (b)
Ryža. 253. Balenie zmontovaného statora (a) a statora s vinutím (b)
a stator 2 je vyrobený z plechov z elektroocele (obr. 252), ktoré sú navzájom izolované izolačným lakovým filmom, šupinami atď. škodlivý účinok vírivé prúdy vznikajúce v oceli statora a rotora pri rotácii magnetického poľa. Statorové a rotorové plechy majú otvorené, polouzavreté resp uzavretá forma, v ktorom sú umiestnené vodiče zodpovedajúcich vinutí. V statore sa najčastejšie používajú polouzavreté štrbiny obdĺžnikového alebo oválneho tvaru, vo vysokovýkonných strojoch - otvorené štrbiny obdĺžnikový tvar.
Jadro statora 1 (obr. 253, a) je vtlačené do liateho rámu 3 a zaistené poistnými skrutkami. Jadro rotora je nalisované na hriadeľ rotora, ktorý sa otáča v guľôčkových ložiskách uložených v dvoch ložiskových štítoch. Vzduchová medzera medzi statorom a rotorom má minimálna veľkosť, prijateľné z hľadiska presnosti montáže a mechanickej tuhosti konštrukcie. V motoroch s nízkym a stredným výkonom je vzduchová medzera zvyčajne niekoľko desatín milimetra. Táto medzera zaisťuje zníženie magnetického odporu magnetického obvodu stroja, a tým aj zníženie magnetizačného prúdu potrebného na vytvorenie magnetického toku v motore. Zníženie magnetizačného prúdu umožňuje zvýšiť účinník motora.
Vinutie statora. Vyrába sa vo forme série zvitkov okrúhlych resp obdĺžnikový rez. Vodiče umiestnené v drážkach sú spojené tak, aby vytvorili rad cievok 2 (obr. 253,b). Cievky sú rozdelené do identických skupín podľa počtu fáz, ktoré sú umiestnené symetricky pozdĺž obvodu statora (obr. 254, a) alebo rotora. V každej takejto skupine sú všetky cievky elektricky spojené a tvoria jednu fázu vinutia, t.j. elektrický obvod. O veľké hodnoty fázový prúd alebo ak je potrebné prepínať jednotlivé cievky, fázy môžu mať niekoľko paralelných vetiev. Najjednoduchším prvkom vinutia je závit (obr. 254, b), pozostávajúci z dvoch vodičov 1 a 2, umiestnených v drážkach umiestnených v určitej vzdialenosti od seba -
 Ryža. 254. Umiestnenie cievok trojfázové vinutie na statore asynchrónneho motora (a) a závitom dvoch vodičov (b)
Ryža. 254. Umiestnenie cievok trojfázové vinutie na statore asynchrónneho motora (a) a závitom dvoch vodičov (b)
u. Táto vzdialenosť sa približne rovná jednému pólovému dieliku m, čo sa chápe ako dĺžka oblúka zodpovedajúceho jednému pólu.
Typicky sú závity tvorené vodičmi ležiacimi v rovnakých štrbinách kombinované do jednej alebo dvoch cievok. Niekedy sa nazývajú sekcie. Sú položené tak, že každá drážka pojme jednu stranu cievky alebo dve strany - jednu nad druhou. V súlade s tým sa rozlišuje jedno- a dvojvrstvové vinutie. Hlavným parametrom, ktorý určuje rozdelenie vinutia medzi štrbinami, je počet štrbín q na pól a fázu.
Vo vinutí statora dvojpólového motora (pozri obr. 254, a) každá fáza (A-X; B-Y; C-Z) pozostáva z troch cievok, ktorých strany sú umiestnené v troch susedných štrbinách, t.j. q = 3. Zvyčajne q > 1 , takéto vinutie sa nazýva distribuované.
Najrozšírenejšie sú dvojvrstvové distribuované vinutia. Ich časti 1 (obr. 255, a) sú umiestnené v drážkach 2 statora v dvoch vrstvách. Vodiče vinutia statora sú v drážkach vystužené textolitovými klinmi 5 (obr. 255,b), ktoré sú umiestnené pri hlavách zubov.
Steny drážky sú pokryté listovým izolačným materiálom 4 (elektrická lepenka, lakovaná tkanina atď.). Vodiče ležiace v drážkach sú navzájom spojené zodpovedajúcim spôsobom z koncových strán stroja. Drôty, ktoré ich spájajú, sa nazývajú predné časti. Keďže predné časti sa nepodieľajú na vyvolaní napr. atď., vykonávajú sa čo najkratšie.
Jednotlivé cievky statorového vinutia môžu byť zapojené do hviezdy alebo trojuholníka. Začiatky a konce vinutí každej fázy sú vyvedené na šesť svoriek motora.
Vinutie rotora. Vinutie rotora je vyrobené vo forme klietky veveričky (obr. 256, a). Je vyrobený z medených alebo hliníkových tyčí skratovaných na koncoch dvoma krúžkami (obr. 256, b). Tyče tohto vinutia sú vložené do štrbín rotora bez akejkoľvek izolácie, pretože napätie vo vinutí rotora nakrátko je nulové.
 Ryža. 255. Dvojvrstvové vinutie statora asynchrónneho motora: 1 - sekcia; 2 - drážka; 3 - vodič; 4 - izolačný materiál; 5 - klin; 6 - zub
Ryža. 255. Dvojvrstvové vinutie statora asynchrónneho motora: 1 - sekcia; 2 - drážka; 3 - vodič; 4 - izolačný materiál; 5 - klin; 6 - zub
 Ryža. 256. Rotor na veveričku: a - klietka na veveričku; b - rotor s veveričkovou klietkou tyčí; c - rotor s liatou klietkou veveričky; 1 - skratové krúžky; 2- tyče; 3- hriadeľ; 4 - jadro rotora; 5 - ventilačné lopatky; 6 - liate klietkové tyče
Ryža. 256. Rotor na veveričku: a - klietka na veveričku; b - rotor s veveričkovou klietkou tyčí; c - rotor s liatou klietkou veveričky; 1 - skratové krúžky; 2- tyče; 3- hriadeľ; 4 - jadro rotora; 5 - ventilačné lopatky; 6 - liate klietkové tyče
Drážky rotora vo veveričke sú zvyčajne vyrobené polouzavreté a v strojoch s nízkym výkonom - uzavreté (drážka má oceľový okraj, ktorý ju oddeľuje od vzduchovej medzery). Tento tvar drážky umožňuje dobre spevniť vodiče vinutia rotora, hoci mierne zvyšuje jeho indukčný odpor.
V motoroch s výkonom do 100 kW sa tyče vo veveričke zvyčajne získavajú nalievaním roztaveného hliníka do drážok jadra rotora (obr. 256, c). Spolu s tyčami klietky veveričky sú odliate aj koncové skratovacie krúžky, ktoré ich spájajú.
Na tento účel je vhodný hliník, pretože má nízku hustotu, pomerne vysokú elektrickú vodivosť a ľahko sa topí.
Motory majú zvyčajne ventilátory namontované na hriadeli rotora. Vykonávajú nútené vetranie vyhrievané časti stroja (vinutia a oceľ statora a rotora), čo umožňuje získať väčší výkon z motora. V motoroch s rotorom vo veveričke sú lopatky ventilátora často odlievané spolu s bočnými krúžkami klietky veveričky (pozri obr. 256, c).
Asynchrónne motory s rotorom nakrátko sú konštrukčne jednoduché a prevádzkovo spoľahlivé. Široko sa používajú na pohon kovoobrábacích strojov a iných zariadení, ktoré začínajú pracovať bez zaťaženia. Relatívne nízky rozbehový moment týchto motorov a veľký rozbehový prúd však neumožňujú ich použitie na pohon takých strojov a mechanizmov, ktoré je nutné pri veľkom zaťažení (s veľkou záťažou) ihneď uviesť do prevádzky. štartovací moment). Medzi takéto stroje patria zdvíhacie zariadenia, kompresory atď.
Môžete zvýšiť štartovací moment a znížiť štartovací prúd vykonaním klietky veveričky so zvýšeným aktívnym odporom. V tomto prípade bude mať motor zvýšený sklz a veľké straty výkonu vo vinutí rotora. Takéto motory sa nazývajú motory so zvýšeným sklzom (označované ako AC). Môžu byť použité na riadenie strojov, ktoré fungujú relatívne krátky čas. Na e. p.s. AC tieto motory (so sklzom do 10%) sa používajú na pohon kompresorov, ktoré pracujú periodicky na krátke časové úseky, keď tlak vo vzduchojemoch klesne pod určitú hranicu.
Motory so zvýšeným rozbehovým momentom. Asynchrónne motory s kotvou nakrátko so zvýšeným rozbehovým momentom majú špeciálnu konštrukciu rotora (označené AP). Patria sem motory s dvojitou veveričkou a motory s hlbokou drážkou.
Rotor 3 (obr. 257,a) motora s dvojitou klietkou nakrátko má dve vinutia nakrátko. Vonkajšia klietka 1 je štartovacia klietka. Má vysokú aktívnu a nízku reaktanciu. Vnútorná klietka 2 je vinutie hlavného rotora; naopak, má nevýznamnú aktívnu a vysokú reaktanciu. V počiatočnom momente rozbehu tečie prúd hlavne cez vonkajšiu klietku, čím vzniká výrazný krútiaci moment. Keď sa rýchlosť otáčania zvyšuje, prúd prechádza do vnútornej klietky a na konci procesu štartovania stroj funguje ako zvyčajne motor vo veveričke s jednou (vnútornou) bunkou. Posun prúdu do vonkajšieho článku v počiatočnom momente spustenia sa vysvetľuje pôsobením, napr. d.s. samoindukcia indukovaná vo vodičoch rotora. Čím nižšie je vodič umiestnený v drážke, tým väčší magnetický zvodový tok 6 je pokrytý a tým väčšia je e. d.s. indukuje sa v ňom samoindukcia (obr. 257, c), preto bude mať väčší indukčný odpor.
Posun prúdu do horných vodičov rotora má silný vplyv pri stojacom rotore, kedy je frekvencia prúdu indukovaného v oboch článkoch rotora vysoká. V tomto prípade sú indukčné odpory oboch článkov oveľa väčšie ako aktívne a prúd sa medzi ne rozdeľuje nepriamo úmerne k ich indukčným odporom, t.j. prechádza prevažne vonkajším článkom s vysokým aktívnym odporom.
Keď sa rýchlosť otáčania rotora zvýši, frekvencia prúdu v ňom sa zníži (rotujúce magnetické pole bude pretínať vodiče rotora s nižšou frekvenciou) a prúd začne prechádzať oboma bunkami v súlade s ich aktívnymi odpormi. , teda hlavne cez vnútornú bunku .
Proces spúšťania motora s dvojitou klietkou nakrátko je podobný procesu spúšťania asynchrónneho motora s navinutým rotorom, keď sa na začiatku štartu do obvodu vinutia rotora zavedie dodatočný aktívny odpor (štartovací reostat). a s postupujúcim zrýchlením sa tento odpor odstráni. Rovnakým spôsobom v uvažovanom motore prúd na začiatku rozbehu prechádza vonkajšou klietkou s vysokým aktívnym odporom a potom, keď sa zrýchľuje, postupne prechádza do vnútornej klietky s nízkym aktívnym odporom.
Ryža. 257. Konštrukcia rotorov asynchrónnych motorov so zvýšeným rozbehovým momentom: s dvojitou klietkou nakrátko (a), s hlbokými drážkami (b) a úsekmi ich drážok (c a d)
Na zvýšenie aktívneho odporu štartovacej klietky sú jej tyče vyrobené z mangánovej mosadze alebo bronzu. Tyče pracovnej klietky sú vyrobené z medi, ktorá má nízku rezistivita a ich prierezová plocha je väčšia ako plocha štartovacej bunky. V dôsledku toho sa aktívny odpor štartovacieho článku zvyšuje 4-5 krát v porovnaní s pracovným. Medzi tyčami oboch článkov je úzka medzera 5, ktorej rozmery určujú indukčnosť pracovného článku. Motor s dvoma klietkami je o 20-30% drahší ako motor s veveričkovou klietkou bežnej konštrukcie. Na zjednodušenie technológie výroby rotora sa dvojklietkové motory malého a stredného výkonu vyrábajú s klietkou z liateho hliníka.
Prevádzka motorov s hlbokými štrbinami (obr. 257, b) je tiež založená na využití fenoménu prúdového posunu. V týchto motoroch sú tyče 4 vo veveričke vyrobené vo forme úzkych medených tyčí umiestnených v hlbokých drážkach rotora 3 (výška drážky je 10-12 krát väčšia ako jej šírka). Spodné vrstvy tyčí, umiestnené ďalej od povrchu rotora, sú výrazne pokryté Vysoké číslo Magnetických čiar zvodového toku je 6 ako horné (obr. 257d), preto majú mnohonásobne väčšiu indukčnosť. Na začiatku rozbehu v dôsledku zvýšenej indukčnej reaktancie spodných častí tyčí prúd prechádza hlavne cez ne horné časti. V tomto prípade sa využíva len malá časť prierezu každej tyče, čo vedie k zvýšeniu jej aktívneho odporu a následne k zvýšeniu aktívneho odporu celého vinutia rotora.
S rastúcimi otáčkami rotora sa prietok prúdu do horných častí tyčí zmenšuje (z rovnakého dôvodu ako pri motore s dvojitou klietkou nakrátko) a po ukončení štartu sa prúd rovnomerne rozloží po ich krížoch. prierezová plocha.