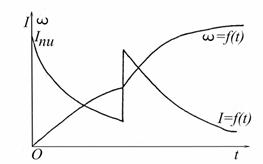
เมื่อสตาร์ทเครื่องนั่นคือเมื่อสตาร์ทและเร่งความเร็ว แรงบิดที่เครื่องยนต์พัฒนาขึ้นจะต้องเกินโมเมนต์ต้านทานโหลด ไม่เช่นนั้นเครื่องยนต์จะไม่สามารถเร่งความเร็วได้ ในช่วงเวลาเริ่มต้นของการสตาร์ท เมื่อความเร็วมอเตอร์เป็นศูนย์และสลิปเป็นหนึ่ง EMF ในขดลวดโรเตอร์จะสูงสุด (ดู 2.37) และกระแสสตาร์ทในขดลวดสเตเตอร์ I 2 ตาม (2.40) เกินพิกัดกระแสไฟฟ้าที่กำหนดอย่างมาก ดังนั้นกระแสในขดลวดสเตเตอร์จะเพิ่มขึ้นนั่นคือกระแสที่ใช้โดยมอเตอร์จากเครือข่ายจ่ายไฟ การเริ่มต้นหลายหลากปัจจุบัน y p = I P /I NOM สำหรับมอเตอร์ด้วย โรเตอร์กรงกระรอกถึง 5 - 7 เมื่อเครื่องยนต์เร่งความเร็ว สลิปจะลดลง ส่งผลให้แรงเคลื่อนไฟฟ้าและกระแสในขดลวดโรเตอร์ลดลง ดังนั้นกระแสในขดลวดสเตเตอร์จึงลดลง
กระแสไฟฟ้าสตาร์ทขนาดใหญ่อาจไม่เป็นที่ยอมรับ ทั้งสำหรับตัวมอเตอร์เองและสำหรับเครือข่ายที่จ่ายไฟให้กับมอเตอร์ หากสตาร์ทบ่อยครั้ง กระแสไฟฟ้าสตาร์ทขนาดใหญ่จะทำให้อุณหภูมิของขดลวดมอเตอร์เพิ่มขึ้น ซึ่งอาจนำไปสู่ แก่ก่อนวัยความโดดเดี่ยวของมัน หากหลังจากจ่ายไฟให้กับเครื่องยนต์แล้วสตาร์ทไม่ติดไม่ว่าด้วยเหตุผลใดก็ตาม ต้องดับเครื่องยนต์ทันที อุปกรณ์อัตโนมัติการป้องกันที่เกิดจากกระแสไฟสูงหรือด้วยตนเอง ในเครือข่ายจ่ายไฟ เมื่อกระแสไฟฟ้าสูง แรงดันไฟฟ้าจะลดลง ซึ่งส่งผลต่อการทำงานของผู้บริโภครายอื่นที่เชื่อมต่อกับเครือข่าย ดังนั้นการสตาร์ทเครื่องยนต์โดยตรงโดยการเชื่อมต่อโดยตรงกับเครือข่ายแหล่งจ่ายไฟจะได้รับอนุญาตก็ต่อเมื่อกำลังของเครื่องยนต์น้อยกว่ากำลังที่ออกแบบเครือข่ายแหล่งจ่ายไฟไว้มาก
สำหรับมอเตอร์ที่มีโรเตอร์แบบพันแผล กระแสสตาร์ทลดลงทำได้โดยการรวมลิโน่สตาร์ทแบบสามเฟสไว้ในวงจรโรเตอร์ ความต้านทานแบบแอกทีฟที่รวมอยู่ในวงจรของแต่ละเฟสของโรเตอร์ทำให้กระแสในขดลวดของโรเตอร์ลดลง และในขดลวดสเตเตอร์ด้วย ในเวลาเดียวกัน การเพิ่มขึ้นของความต้านทานแบบแอกทีฟในวงจรโรเตอร์ทำให้ค่าตัวประกอบกำลังเพิ่มขึ้น cosψ 2 และได้รับค่าขนาดใหญ่เพียงพอ แรงบิดเริ่มต้นด้วยกระแสเริ่มต้นที่ลดลง เมื่อความเร็วในการหมุนของเครื่องยนต์เพิ่มขึ้น ความต้านทานของลิโน่สตาร์ทจะค่อยๆ หรือลดลงทีละขั้นจนเป็นศูนย์
กระแสไฟฟ้าเริ่มต้นของมอเตอร์อะซิงโครนัสที่มีโรเตอร์แบบกรงกระรอกสามารถลดลงได้โดยการสตาร์ทที่แรงดันไฟฟ้าที่ลดลง นอกจากนี้ยังสามารถเปิดขดลวดสเตเตอร์ที่ออกแบบมาสำหรับการเชื่อมต่อแบบเดลต้าในระหว่างช่วงเริ่มต้นในรูปแบบสตาร์ได้อีกด้วย อย่างไรก็ตาม วิธีการเหล่านี้จะช่วยลดแรงบิดได้อย่างมาก และใช้ได้เฉพาะเมื่อสตาร์ทโดยไม่มีโหลดหรือที่โหลดต่ำเท่านั้น ลดกระแสสตาร์ทขณะเดียวกันก็รักษาแรงบิดสูงโดยสตาร์ทที่ความถี่แรงดันไฟฟ้าจ่ายลดลง
สำหรับกลไกด้วย เงื่อนไขที่ยากลำบากการเริ่มต้นซึ่งเป็นที่พึงปรารถนาที่จะใช้มอเตอร์แบบอะซิงโครนัสกับโรเตอร์กรงกระรอกขอแนะนำให้ใช้มอเตอร์ที่มีคุณสมบัติการสตาร์ทที่ดีขึ้น: ด้วยแรงบิดสตาร์ทที่มากขึ้นและน้อยกว่ามอเตอร์ จุดประสงค์ทั่วไป, เริ่มต้นปัจจุบัน เหล่านี้เป็นเครื่องยนต์ที่มีโรเตอร์แบบกรงคู่และมีร่องลึก รูปร่างของช่องและตัวนำแบบแอคทีฟของขดลวดกระดองของโรเตอร์แบบสองกรงและช่องลึกจะแสดงในรูปที่ 1 2.30
โรเตอร์ของมอเตอร์แบบสองกรงมีขดลวดลัดวงจรสองขดลวด: ภายนอก 1 (รูปที่ 2.30a.) หรือสตาร์ททำจากแท่งที่มีหน้าตัดเล็ก ๆ ที่ทำจากวัสดุที่มีค่าการนำไฟฟ้าลดลง (ทองเหลือง, บรอนซ์) และภายใน 2 หรืองาน - ทำจากแท่งที่มีหน้าตัดขนาดใหญ่จากวัสดุที่มีค่าการนำไฟฟ้าสูง (ทองแดง) ที่จุดเริ่มต้นของการสตาร์ทเครื่องยนต์ (ที่ n = 0, s = 1) ความถี่ของกระแสในโรเตอร์จะเท่ากับความถี่ไฟหลัก ในกรณีนี้ ความต้านทานแบบเหนี่ยวนำของเซลล์จะมีขนาดใหญ่เมื่อเทียบกับเซลล์ที่ทำงานอยู่ (XL = 2πfL) ความต้านทานแบบเหนี่ยวนำของกรงส่วนล่างที่ทำงานซึ่งฝังลึกอยู่ในตัวโรเตอร์และประกอบกับฟลักซ์การรั่วซึมขนาดใหญ่ (แสดงด้วยเส้นประในรูปที่ 2.30) มีสูงเป็นพิเศษ กระแสส่วนใหญ่จะไหลผ่านกรงด้านบนซึ่งมีความต้านทานแบบแอกทีฟสูง เนื่องจากกระแสสตาร์ทลดลงและแรงบิดสตาร์ทเพิ่มขึ้น เมื่อเครื่องยนต์เร่งความเร็ว ความถี่ของกระแสของโรเตอร์จะลดลงหลายสิบครั้ง เนื่องจากการสลิปจะลดลงจากเอกภาพเป็นหนึ่งในร้อย ผลที่ตามมาคือค่ารีแอกแตนซ์รีแอคทีฟของโรเตอร์ซึ่งแปรผันตามความถี่ จะลดลงและไม่มีนัยสำคัญสำหรับทั้งขดลวดสตาร์ทและขดลวดทำงาน ในกรณีนี้ กระแสของโรเตอร์ซึ่งกระจายระหว่างเซลล์ในสัดส่วนผกผันกับความต้านทานเริ่มไหลส่วนใหญ่ในขดลวดทำงานที่มีความต้านทานต่ำ ดังนั้น กระบวนการสตาร์ทเครื่องยนต์แบบสองเซลล์จึงคล้ายกับกระบวนการสตาร์ทแบบรีโอสแตติกของเครื่องยนต์แบบ Wound-Rotor
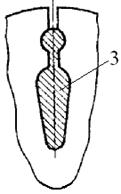
รูปที่ 2.30 – รูปทรงของร่องของโรเตอร์แบบกรงสองชั้นและร่องลึก
นอกจากนี้ยังมีโรเตอร์แบบอื่นๆ ที่มีกรงสองชั้น เช่น มีร่องรูปทรง 3 หุ้มด้วยอลูมิเนียม (รูปที่ 2.30b) ที่นี่ความต้านทานแบบแอกทีฟที่เพิ่มขึ้นของเซลล์เมื่อเริ่มต้นนั้นรับประกันได้โดยการแทนที่กระแสไปที่ส่วนบนของตัวนำเท่านั้น เนื่องจากวัสดุของเซลล์ทั้งสองเหมือนกัน การออกแบบนี้ง่ายกว่าและราคาถูกกว่า แต่ลักษณะการสตาร์ทของเครื่องยนต์ค่อนข้างแย่กว่านั้น
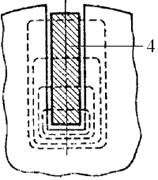
ในทำนองเดียวกันการกระจัดของกระแสใน ส่วนบนตัวนำในระหว่างการสตาร์ท เมื่อความถี่ของกระแสในโรเตอร์สูง จะถูกจัดเตรียมไว้ในโรเตอร์ที่มีร่องลึก (รูปที่ 2.30c) ซึ่งตัวนำ 4 ซึ่งมักจะเป็นทองแดงจะมีความสูงยาวมาก การแทนที่กระแสในส่วนบนของตัวนำจะเทียบเท่ากับการลดหน้าตัดและให้ความต้านทานแอคทีฟของโรเตอร์เพิ่มขึ้นในระหว่างการสตาร์ทและกระแสสตาร์ทลดลง
ใครก็ตามที่เกี่ยวข้องกับการสตาร์ทมอเตอร์ไฟฟ้าจะคุ้นเคยกับสำนวน กระแสสตาร์ทของมอเตอร์ไฟฟ้า เมื่อสตาร์ท กระแสสตาร์ทของมอเตอร์ไฟฟ้าสามารถอยู่ในช่วงตั้งแต่ 2 ถึง 8 เท่าของค่า ทั้งนี้ขึ้นอยู่กับกำลังและความเร็วที่กำหนด
ทั้งหมดนี้ส่งผลเสียต่อการทำงานของผู้บริโภครายอื่นที่ทำงานในสายเดียวกันกับอุปกรณ์นี้ ในการเปิดตัวดังกล่าวซึ่งมีลักษณะเฉพาะ ระดับสูงการบริโภค พลังงานปฏิกิริยาด้านหลัง ช่วงสั้น ๆเวลา มอเตอร์ไฟฟ้าอื่น ๆ และผู้บริโภคที่มีตัวบ่งชี้ความเสถียรของแรงดันไฟฟ้าเป็นลำดับความสำคัญอยู่ในสถานะไม่สบาย สถานการณ์นี้นำไปสู่ผลกระทบที่คาดเดาไม่ได้ในการทำงานของอุปกรณ์ไฟฟ้านี้ ท้ายที่สุดแล้วการเริ่มต้นแต่ละครั้งจะลดแรงดันไฟฟ้าของเครือข่ายจ่ายไฟลงอย่างมาก เพื่อที่จะลด ผลกระทบด้านลบมีการใช้กระบวนการดังกล่าวหลายอย่าง วิธีการแบบดั้งเดิมเพื่อลด
1. มอเตอร์ไฟฟ้าสตาร์ทหลังจากถอดภาระทางกลบนเพลาขับของมอเตอร์ไฟฟ้าออก ซึ่งเรียกว่าการสตาร์ทรอบเดินเบา จากนั้นจึงโหลดมอเตอร์ไฟฟ้า ค่อยๆ เข้าสู่โหมดการทำงาน วิธีการนี้ใช้ได้กับปั๊มที่ใช้งานและ ระบบระบายอากาศซึ่งสามารถควบคุมโหลดของมอเตอร์ไฟฟ้าได้โดยใช้วัสดุสิ้นเปลืองและตัวปิดระบบดูด ซึ่งจะช่วยลดปริมาณพลังงานปฏิกิริยาดังนั้น กระแสเริ่มต้นของมอเตอร์ไฟฟ้า
2. การเปิดมอเตอร์ไฟฟ้าตามวงจรสตาร์ → เดลต้า วิธีการนี้ใช้ได้เมื่อ เงื่อนไขบางอย่าง- มอเตอร์ต้องมีขดลวดสำหรับช่วงแรงดันไฟฟ้าที่ต้องการ สำหรับพวกเรา เครือข่ายอุตสาหกรรมช่วงนี้เป็น 380/660V หากตรงตามเงื่อนไขนี้ มอเตอร์ไฟฟ้าจะสตาร์ทในโหมดซอฟต์ ซึ่งกระแสสตาร์ทจะต้องไม่เกินกระแสที่กำหนดมากกว่า 2 เท่า
3. เริ่มต้นหม้อแปลงอัตโนมัติ การเริ่มต้นในลักษณะนี้ค่อนข้างชวนให้นึกถึงการกระทำก่อนหน้านี้ มีเพียงแรงดันไฟฟ้าเท่านั้นที่จ่ายให้กับมอเตอร์ไฟฟ้าที่สตาร์ทโดยการจ่ายแรงดันไฟฟ้าอย่างราบรื่นผ่านตัวแปลงอัตโนมัติ
การเปิดตัวประเภทนี้ไม่ได้ใช้งานจริงเนื่องจากมีต้นทุนสูงและขนาดบัลลาสต์ที่สำคัญ
4. การใช้ตัวต้านทานสตาร์ทหรือเครื่องปฏิกรณ์เพื่อจำกัดกระแสสตาร์ท ในกรณีที่กระแสเกินค่าที่ระบุถูกปล่อยออกมาในรูปของพลังงานความร้อนที่ตัวต้านทานการดับ
5. ตัวควบคุมความถี่ ทิศทางใหม่ในการเปิดตัวโซลูชันและความสามารถในการลด - วิธีการนี้ถูกนำมาใช้ทุกที่ ทุกแห่งที่จำเป็นและไม่จำเป็น วิธีการเริ่มต้นนี้ไม่จำเป็นต้องมีการลงทุนทางการเงินจำนวนมากหากเกี่ยวข้องกับมอเตอร์ไฟฟ้าขนาดเล็กขนาด 10–30 กิโลวัตต์ เมื่อติดตั้งอุปกรณ์ดังกล่าวด้วยมอเตอร์ไฟฟ้ากำลังสูงกว่า ค่าใช้จ่ายอาจสูงกว่าต้นทุนของมอเตอร์ไฟฟ้าเองอย่างมาก
6. อุปกรณ์สตาร์ทแบบนุ่มนวลที่ใช้องค์ประกอบอิเล็กทรอนิกส์โซลิดสเตตสมัยใหม่ - ไทริสเตอร์ การควบคุมอุปกรณ์สตาร์ทดังกล่าวดำเนินการโดยวิธีการควบคุมเฟส แต่วิธีนี้มีข้อเสียเปรียบที่สำคัญประการหนึ่ง: ในเครือข่ายที่มีพลังงานไม่เพียงพอ แรงดันไฟฟ้าตกไม่สามารถชดเชยได้ อุปกรณ์ดังกล่าวอยู่ภายใต้สภาวะการทำงานที่สำคัญในโหมดนี้และความล้มเหลวของอุปกรณ์นั้นขึ้นอยู่กับเวลา
ในการแก้ปัญหานี้ ผู้บริโภคจะต้องค้นหาวิธีแก้ปัญหาที่ยอมรับได้ในการสตาร์ทและลดความเร็วของมอเตอร์ไฟฟ้ากำลังสูงอย่างมีประสิทธิภาพและปลอดภัย
ไม่มีโพสต์ที่คล้ายกัน
ในกรณีส่วนใหญ่ มอเตอร์แบบอะซิงโครนัสจะเปิดโดยการเชื่อมต่อโดยตรงกับเครือข่าย ในวงจรสเตเตอร์ของมอเตอร์หน้าสัมผัสของสตาร์ทเตอร์แม่เหล็กไฟฟ้าจะถูกปิดขดลวดจะเชื่อมต่อกับแรงดันไฟฟ้าเชิงเส้นของเครือข่ายสนามแม่เหล็กไฟฟ้าหมุนเกิดขึ้นและไดรฟ์เริ่มทำงาน
แน่นอนว่าสิ่งนี้ส่งผลให้เกิดกระแสพุ่งเข้าที่เกินค่าพิกัดห้าถึงเจ็ดเท่า และระยะเวลาของการขว้างนี้ขึ้นอยู่กับระยะเวลาในการสตาร์ทนั่นคือกำลังของเครื่องยนต์ ยิ่งมอเตอร์มีขนาดใหญ่เท่าไร การเร่งความเร็วก็จะยิ่งนานขึ้นเท่านั้น และผลของกระแสที่เพิ่มขึ้นในเครือข่ายจ่ายไฟและขดลวดสเตเตอร์ก็จะยิ่งนานขึ้นด้วย
สำหรับไดรฟ์ไฟฟ้าแบบอะซิงโครนัส "อ่อนแอ" ที่มีกำลังไม่เกิน 3 kW ข้อเสียของการเชื่อมต่อโดยตรงกับเครือข่ายเหล่านี้ไม่สำคัญ แน่นอนว่ากระแสไฟกระชากนั้นไม่สามารถละเลยได้ แต่ถึงอย่างนั้น เครือข่ายในครัวเรือน กระแสสลับมักจะมีพลังงานสำรองที่ช่วยให้สามารถทนต่อการโอเวอร์โหลดชั่วขณะได้
สำหรับมอเตอร์ขับเคลื่อนนั้น ในกรณีที่ไม่มีแรงดันไฟฟ้าตก มอเตอร์จะสตาร์ทเสมอโดยไม่มีผลกระทบใด ๆ นั่นเป็นเหตุผลว่าทำไม การเชื่อมต่อโดยตรงเครือข่ายมักใช้สำหรับไดรฟ์แบบอะซิงโครนัสของปั๊มและพัดลมขนาดเล็ก เลื่อยวงเดือน เครื่องขัดทราย และเครื่องจักรงานโลหะ
การเริ่มต้นของไดรฟ์เหล่านี้เกิดขึ้นในค่อนข้าง เงื่อนไขที่ดีและเครื่องยนต์ได้รับการออกแบบเพื่อ งานถาวรเมื่อเชื่อมต่อ ขดลวดสเตเตอร์แรงดันไฟแบบสตาร์และสาย 380 โวลต์ (แรงดันปกติ 380/220 โวลต์)
แต่เมื่อกำลังของเครื่องยนต์อยู่ที่สิบหรือ 15 กิโลวัตต์ขึ้นไป การเชื่อมต่อโดยตรงกับเครือข่ายจะกลายเป็นสิ่งที่ยอมรับไม่ได้ จากนั้นจะต้องจำกัดกระแสไฟกระชากที่ไหลเข้า เนื่องจากจะสร้างภาระเพิ่มเติมบนเครือข่ายและอาจทำให้เกิดแรงดันไฟฟ้า "ลดลง"
วิธีที่ได้รับความนิยมมากที่สุดในการจำกัดกระแสเริ่มต้นของไดรฟ์แบบอะซิงโครนัสคือการเริ่มต้นด้วยแรงดันไฟฟ้าที่ลดลง สำหรับเครื่องยนต์ 660/380 โวลต์ การสตาร์ทดังกล่าวสามารถทำได้โดยการเปลี่ยนขดลวดจากสตาร์เป็นเดลต้า ในโหมดสตาร์ มอเตอร์จะใช้กระแสไฟฟ้าน้อยลงและโหลดบนเครือข่ายจะลดลง
การสลับไปใช้เดลต้าไม่กี่วินาทีหลังจากสตาร์ทสามารถจัดระเบียบได้โดยใช้รีเลย์เวลาหรือโดยการควบคุมกระแสในวงจรสเตเตอร์ อย่างไรก็ตามมีปัญหาอยู่ประการหนึ่ง - เมื่อแรงดันไฟฟ้าลดลง แรงบิดของมอเตอร์บนเพลาก็ลดลงเช่นกัน
ยิ่งกว่านั้นหากแรงดันไฟฟ้าลดลงครึ่งหนึ่งแรงบิดจะลดลงสี่เท่า - การพึ่งพานั้นเป็นกำลังสอง และเรื่องนี้แม้จะเป็นช่วงเริ่มต้นก็ตาม มอเตอร์แบบอะซิงโครนัสมีข้อจำกัดอยู่แล้วเนื่องจากลักษณะเฉพาะของคุณลักษณะทางกลแบบอะซิงโครนัส
ดังนั้นการลดแรงดันไฟฟ้าและการเปลี่ยนจาก "สตาร์" เป็น "เดลต้า" จึงใช้เฉพาะในไดรฟ์ไฟฟ้าที่มีความสามารถทางเทคโนโลยีในการเริ่มต้นโดยไม่มีโหลดบนเพลาโดยสมบูรณ์ สิ่งนี้เกี่ยวข้องกับมอเตอร์รถแข่งของชุดคอนเวอร์เตอร์ สำหรับการขับเคลื่อนของเครื่องเลื่อยหลายใบที่ทรงพลังและไดรฟ์ที่คล้ายกัน
การสตาร์ทด้วยแรงดันไฟฟ้าต่ำไม่เหมาะเลย ตัวอย่างเช่น สำหรับการขับเคลื่อนของสายพานลำเลียง ซึ่งเกือบทุกครั้งจะต้องสตาร์ทภายใต้ภาระ สำหรับไดรฟ์ดังกล่าว จะใช้การสตาร์ทแบบรีโอสแตติกซึ่งทำให้สามารถจำกัดกระแสสตาร์ทของมอเตอร์ได้ แต่ไม่ลดแรงบิด
ในการสตาร์ทลิโน่สแตท จะใช้มอเตอร์ที่มีโรเตอร์แบบพันแผล ซึ่งช่วยให้คุณสามารถรวมความต้านทานเพิ่มเติมในวงจรของคุณได้ ความต้านทานยังสามารถส่งออกเป็นขั้น และการสตาร์ทจะราบรื่นขึ้น การควบคุมลิโน่มักใช้เพื่อเปลี่ยนความเร็วของไดรฟ์ระหว่างการทำงาน
แต่ประสิทธิภาพสูงสุดสำหรับไดรฟ์แบบอะซิงโครนัสกำลังเริ่มใช้งาน ตัวแปลงความถี่(พีซี). ด้วยการเปลี่ยนความถี่และขนาดของแรงดันไฟฟ้า คอนเวอร์เตอร์ช่วยให้มอเตอร์อะซิงโครนัสสตาร์ทและทำงานด้วย ประสิทธิภาพสูงสุดเป็นส่วนหนึ่งของไดรฟ์ใดๆ ในกรณีนี้ กระแสไฟกระชากจะถูกกำจัดออกไปโดยสิ้นเชิง และแรงบิดจะถึงค่าสูงสุดที่เป็นไปได้
การคำนวณระบบไฟฟ้าแต่อย่างใด ปั๊มจุ่มจะต้องมีการแก้ไขกระแสไหลเข้าด้วย ตามเอกสารต่าง ๆ ที่พบในเน็ต กระแสเริ่มต้นจะเท่ากับกระแสการทำงานของปั๊มเพิ่มขึ้น 3-7 เท่า- มีการกล่าวถึงตัวคูณ 9x ด้วยซ้ำ
เรามาดูกันว่าขนาดของกระแสเริ่มต้นนั้นขึ้นอยู่กับขนาดเท่าใด ก่อนอื่นเลย ขึ้นอยู่กับรุ่นของเครื่องยนต์ด้วย ยิ่งและ เครื่องยนต์ที่ทรงพลังยิ่งขึ้นโมเมนต์เฉื่อยของโรเตอร์ก็จะยิ่งแข็งแกร่งขึ้นเท่านั้นยิ่งต้องใช้พลังงานมากขึ้นในการโปรโมต ดังนั้นตัวคูณกระแสที่คำนวณได้เมื่อสตาร์ทเครื่องจะเพิ่มขึ้นจาก 3 สำหรับมอเตอร์ครึ่งกิโลวัตต์เป็น 4 สำหรับมอเตอร์ขนาดสองกิโลวัตต์
ในขณะที่สตาร์ทเครื่องก็มีบทบาทสำคัญเช่นกัน - โรเตอร์ที่หมุนอย่างอิสระในปั๊มจะให้กระแสไฟฟ้าน้อยกว่าเมื่อสตาร์ทเครื่องมากกว่า เต็มไปด้วยเสาน้ำหลายเมตรในสายน้ำหลักตารางตัวคูณสำหรับกระแสเริ่มต้นของปั๊ม Grundfos SP
ตารางแสดงการขึ้นต่อกันของกระแส In ที่ใช้งานในหน่วยแอมแปร์ และตัวคูณสำหรับ Ist/In กระแสเริ่มต้นบนกำลัง P2 สำหรับเฟสเดียวและ มอเตอร์สามเฟสกลุ่มผลิตภัณฑ์กรุนด์ฟอส SP เวลาเร่งความเร็วจริงคือ 0.1 วินาที
| P2 กิโลวัตต์ | ใน A (1x230) | Ist/ใน (1x230) | ใน, A (3x400) | อิสท์/อิน (3x400) |
| 0.37 | 3.95 | 3.4 | 1.40 | 3.7 |
| 0.55 | 5.80 | 3.5 | 2.20 | 3.5 |
| 0.75 | 7.45 | 3.6 | 2.30 | 4.7 |
| 1.1 | 7.30 | 4.3 | 3.40 | 4.6 |
| 1.5 | 10.2 | 3.9 | 4.20 | 5.0 |
| 2.2 | 14.0 | 4.4 | 5.50 | 4,7 |
อย่าแปลกใจกับความแตกต่างระหว่างกระแสที่ใช้โดยมอเตอร์ในตารางและกำลังในหน่วยกิโลวัตต์ - ผู้ผลิตมอเตอร์สำหรับปั๊มให้กำลังบนเพลามอเตอร์ในลักษณะเฉพาะและขึ้นอยู่กับประสิทธิภาพและน้อยกว่า พลังงานที่ใช้ไป พลังงานไฟฟ้า- และให้ความแรงในปัจจุบันสำหรับเครื่องยนต์ที่โหลดเต็ม
ข้อจำกัดเกี่ยวกับจำนวนการสตาร์ทปั๊มต่อชั่วโมงเนื่องมาจากความร้อนจำนวนมากที่เกิดขึ้นบนขดลวดมอเตอร์โดยกระแสสตาร์ท หากเปิดบ่อยเกินไป ขดลวดจะร้อนเกินไป
ขดลวดที่ร้อนเกินไปมากเกินไปทำให้สูญเสียคุณสมบัติการเป็นฉนวนของสารเคลือบเงาซึ่งเคลือบด้วยการหมุน การลัดวงจร และความล้มเหลวของมอเตอร์ปั๊ม
ผลข้างเคียง
ระหว่างการทำงานของเครื่องยนต์หนัก ( ระดับความสูงความดัน, ตัวกรองทางเข้าอุดตัน, การสะสมในน้ำประปา, การสึกหรอของส่วนประกอบปั๊ม), ขนาดและระยะเวลาของกระแสเริ่มต้นอาจมากกว่าที่คำนวณไว้อย่างมีนัยสำคัญ
ในระหว่างกระแสกระชาก แรงดันไฟฟ้าตกคร่อมสายไฟของปั๊มจะเพิ่มขึ้น กฎ IES 3-64 อนุญาตให้แรงดันไฟฟ้าขาเข้าลดลงไม่เกิน 4%
ต่อสู้กับกระแสไหลเข้า
การสตาร์ทโดยตรงจากเครือข่ายเป็นวิธีแก้ปัญหาที่ง่ายและถูกที่สุด แต่กระแสไฟสตาร์ทที่สูงทำให้เกิดข้อจำกัดในการใช้งาน เพื่อกำจัดข้อเสียนี้จึงใช้วิธีการอื่น:
1. ซอฟท์สตาร์ทเตอร์- นี่คือที่สุด วิธีการที่มีประสิทธิภาพลดกระแสเริ่มต้น ข้อเสียเปรียบหลักประการหนึ่งคือต้นทุนตัวแปลงสูง
สำหรับ ปั๊มกรุนด์ฟอส SQ และ SQE ไม่มีข้อจำกัดเกี่ยวกับจำนวนการสตาร์ทต่อชั่วโมง เนื่องจากมีตัวแปลงความถี่และชุดซอฟต์สตาร์ทติดตั้งอยู่ในตัวเรือนมอเตอร์แล้ว
ในลักษณะที่เรียบง่าย การทำงานของซอฟต์สตาร์ทประกอบด้วยแรงดันไฟฟ้าที่เพิ่มขึ้นบนมอเตอร์อย่างราบรื่นภายใน 2 วินาที ในช่วงเวลานี้ โรเตอร์จะมีเวลาในการหมุนตามความเร็วที่ต้องการ โดยไม่ต้องเพิ่มภาระบนเครือข่าย
2. ตามลำดับ การเชื่อมต่อผ่านหม้อแปลงไฟฟ้ามีขดลวดหลายอัน สำหรับปั๊ม โดยปกติจะใช้ส่วนที่ 1 - 2 ซึ่งจะจำกัดกระแสเมื่อเปิดเครื่อง และเมื่อปั๊มเพิ่มความเร็ว ปั๊มก็จะถูกนำออกจากวงจรตามลำดับ การลดแรงดันไฟฟ้าเริ่มต้นเกิดขึ้นสูงสุด 50% ของแรงดันไฟฟ้าที่จ่าย
3. สำหรับมอเตอร์ปั๊มสามเฟสที่มีกำลังมากกว่า 3 กิโลวัตต์ คุณสามารถใช้วงจรสตาร์ทกับ เปลี่ยนจากดาวเป็นเดลต้า- ในขณะที่สตาร์ทเครื่องยนต์จะเปิดตามวงจร "สตาร์" ซึ่งจะลดกระแสสตาร์ทลง 3 เท่าและหลังจากที่เครื่องยนต์เร่งความเร็วแล้วเท่านั้น การเชื่อมต่อจะถูกเปลี่ยนตามวงจร "เดลต้า"
ข้อจำกัดของกระแสเริ่มต้นแบบอะซิงโครนัส
เมื่อมอเตอร์อะซิงโครนัสเชื่อมต่อกับเครือข่าย จะเกิดกระแสสตาร์ทขนาดใหญ่เกินกระแสที่กำหนด 5…
7 ครั้ง และทำให้เกิดแรงดันไฟฟ้าตกอย่างมีนัยสำคัญในสาย ซึ่งอาจส่งผลให้มอเตอร์ที่ทำงานอยู่บริเวณใกล้เคียงหยุดทำงาน ภายใต้อิทธิพลของกระแสสตาร์ท แรงไดนามิกเกิดขึ้นในมอเตอร์ สร้างความเสียหายและทำลายขดลวดและการโหลด หม้อแปลงไฟฟ้าและสายซึ่งนำไปสู่การสูญเสียพลังงานเพิ่มเติม การจำกัดกระแสเริ่มต้นเป็นสิ่งสำคัญอย่างยิ่งสำหรับการติดตั้งทางการเกษตรเนื่องจากการห่างไกลของมอเตอร์ไฟฟ้าจากแหล่งพลังงานและความสามารถในการสมมูลของกำลังของหม้อแปลงและกำลังเริ่มต้นของมอเตอร์ไฟฟ้า การสตาร์ทบ่อยครั้งจะทำให้ขดลวดมอเตอร์ร้อนขึ้น
คุณสามารถจำกัดกระแสเริ่มต้นได้หลายวิธี: โดยการเพิ่มความต้านทานแบบแอคทีฟหรือแบบเหนี่ยวนำเพิ่มเติมในวงจรสเตเตอร์ การรวมความต้านทานเชิงแอคทีฟหรืออุปนัยเพิ่มเติมในวงจรโรเตอร์ การเปลี่ยนขดลวดสเตเตอร์จาก "เดลต้า" เป็น "ดาว" ในช่วงเริ่มต้น แรงดันสเตเตอร์ลดลง สามารถแนะนำแผนการลดกระแสเริ่มต้นโดยการเปลี่ยนขดลวดจาก "ดาว" เป็น "เดลต้า" (รูปที่ 4.21) สำหรับมอเตอร์ไฟฟ้าที่ขดลวดเฟสได้รับการออกแบบมา แรงดันไฟฟ้าของสาย- สิ่งนี้ใช้กับระบบขับเคลื่อนไฟฟ้าของเครื่องบดย่อยแบบกด เครื่องบดย่อยทรงพลัง ฯลฯ) ในเครือข่ายที่มีแรงดันไฟฟ้า 380 V จำเป็นต้องใช้มอเตอร์ที่ออกแบบมาสำหรับแรงดันไฟฟ้า 660/380 V ด้วยแรงดันไฟฟ้าเครือข่าย 380 V มอเตอร์จะต้องมีแรงดันไฟฟ้า 380/220 V
ลองพิจารณาอัตราส่วนของกระแสสตาร์ทมอเตอร์เมื่อเชื่อมต่อกับ "สตาร์":
(4.73)
ที่ไหน - ความต้านทานขดลวดสเตเตอร์เมื่อเปิดเครื่อง 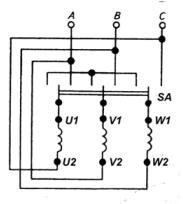
ข้าว. 4.21. แผนภาพการสลับของขดลวดสเตเตอร์แบบอะซิงโครนัส
เครื่องยนต์จากสตาร์ถึงเดลต้า
กระแสเริ่มต้นมอเตอร์เมื่อเปิดขดลวดในเดลต้า: ![]()
อัตราส่วนปัจจุบัน:  (4.74)
(4.74)
ดังนั้น เมื่อขดลวดมอเตอร์ถูกเปิดในโหมดสตาร์ กระแสเฟสจะลดลงด้วยปัจจัยหนึ่ง และกระแสเชิงเส้นจะลดลงด้วยปัจจัยสาม เมื่อแรงดันไฟฟ้าเฟสลดลงหนึ่งปัจจัย แรงบิดของมอเตอร์จะลดลงสามเท่า
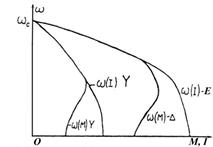
รูปที่.4.22. ลักษณะของมอเตอร์อะซิงโครนัสที่
การเปลี่ยนขดลวดสเตเตอร์จากดาวเป็นเดลต้า
ลักษณะทางกลและระบบเครื่องกลไฟฟ้าเมื่อสตาร์ทเครื่องยนต์โดยใช้วิธีนี้แสดงในรูปที่ 4.22 กระแสสตาร์ทของมอเตอร์แบบอะซิงโครนัสสามารถจำกัดได้โดยการลดแรงดันไฟฟ้าบนสเตเตอร์
กระแสเริ่มต้นของมอเตอร์อะซิงโครนัสที่ แรงดันไฟฟ้าที่ได้รับการจัดอันดับโภชนาการเท่ากับ:
ความต้านทานเฟสของมอเตอร์อยู่ที่ไหนในขณะที่เปิดเครื่อง
เพื่อลดกระแสสตาร์ทด้วยปัจจัย แรงดันไฟฟ้าบนสเตเตอร์ของมอเตอร์อะซิงโครนัสจะต้องลดลงตามจำนวนเท่าเดิม
(4.75)
แรงดันไฟฟ้าที่ลดลงบนสเตเตอร์ทำให้แรงบิดสตาร์ทของมอเตอร์ในหรือ (1 - . รูปที่ 4.23 แสดงคุณลักษณะทางกลและระบบเครื่องกลไฟฟ้าของมอเตอร์แบบอะซิงโครนัสเมื่อกระแสสตาร์ท a ลดลงสองเท่า การลดลงอย่างมีนัยสำคัญ ในแรงบิดสตาร์ทช่วยให้ใช้งานได้ วิธีนี้ส่วนใหญ่เมื่อสตาร์ทเครื่องยนต์ ไม่ได้ใช้งานด้วยช่วงเวลาเริ่มต้นที่ค่อนข้างน้อย

รูปที่.4.23. ลักษณะของมอเตอร์อะซิงโครนัสเมื่อลดขนาด
แรงดันไฟฟ้า.
ในการคำนวณเมื่อเลือกมอเตอร์จำเป็นต้องตรวจสอบความเป็นไปได้ในการสตาร์ทเมื่อแรงดันไฟฟ้าตก: .
กระแสสตาร์ทของมอเตอร์แบบอะซิงโครนัสสามารถถูกจำกัดได้โดยรวมความต้านทานแบบแอคทีฟหรือแบบเหนี่ยวนำเพิ่มเติมในวงจรสเตเตอร์
การคำนวณค่าความต้านทานแบบแอคทีฟหรือแบบเหนี่ยวนำเพิ่มเติมเริ่มต้นด้วยการเลือกกระแสเริ่มต้นที่ต้องการและกำหนดปัจจัยการลดของกระแสนี้:
,
กระแสสตาร์ทของมอเตอร์อยู่ที่ไหนหากไม่มีความต้านทาน
วงจรสเตเตอร์=
ระบุ แรงดันเฟสเครือข่าย; ความต้านทานของขดลวดสเตเตอร์เฟส - กระแสเริ่มต้นเมื่อแนะนำความต้านทานเพิ่มเติมในวงจรสเตเตอร์  - ความต้านทานรวมของวงจรขดลวดสเตเตอร์เมื่อใส่หรือ
- ความต้านทานรวมของวงจรขดลวดสเตเตอร์เมื่อใส่หรือ
ให้เราแทนค่าปัจจุบันและ
ก =  .
.
เพื่อกำหนดค่าที่ต้องการจะมีการสร้างสามเหลี่ยมความต้านทาน (รูปที่ 4.24)
เราคำนวณความต้านทานรวมของขดลวดมอเตอร์:
จากนั้นจึงเกิดความต้านทานแบบแอคทีฟ
,
ตัวประกอบกำลังของเครื่องยนต์อยู่ที่ไหนเมื่อสตาร์ทเครื่อง 
รูปที่.4.24. สามเหลี่ยม แนวต้านเริ่มต้นเมื่อมอเตอร์อะซิงโครนัสเชื่อมต่อกับวงจรสเตเตอร์: a – ความต้านทานแบบแอกทีฟ;
b – ปฏิกิริยารีแอคทีฟ
ปฏิกิริยาอุปนัย ![]()
จากสามเหลี่ยมต้านทาน (รูปที่ 4.25, a) เรามี
(4.76)
ในทำนองเดียวกัน เราจะกำหนดค่าของการอุปนัยเพิ่มเติม
ความต้านทาน (รูปที่ 4.24, b): ![]() (4.77)
(4.77)
คุณลักษณะทางกลและระบบเครื่องกลไฟฟ้าของมอเตอร์พร้อมการแนะนำความต้านทานเพิ่มเติมได้ถูกกล่าวถึงก่อนหน้านี้
แผนภาพสตาร์ทเครื่องยนต์แสดงในรูปที่ 4.25 ความต้านทานจะถูกปิดหลังจากที่เครื่องยนต์เร่งความเร็วหรือ ณ จุดใดจุดหนึ่งซึ่งกระแสไฟกระชากไม่เกิน
การจำกัดกระแสสตาร์ทของมอเตอร์แบบอะซิงโครนัสยังสามารถทำได้โดยการรวมตัวต้านทานเพิ่มเติมในวงจรโรเตอร์ เมื่อสตาร์ทมอเตอร์แบบอะซิงโครนัสด้วยโรเตอร์แบบพันแผลที่มีวงแหวนลัดวงจร แรงบิดสตาร์ทจะเท่ากับ (0.5... 1.5) และกระแสสเตเตอร์และโรเตอร์จะเกินกระแสที่กำหนด 5... 10 เท่า
รูปที่.4.25. แผนภาพแสดงกระแสสตาร์ทของมอเตอร์อะซิงโครนัสด้วย
การใช้ตัวต้านทานในวงจรสเตเตอร์
การนำความต้านทานแบบแอกทีฟเข้าไปในวงจรโรเตอร์จะช่วยลดกระแสของมอเตอร์และเพิ่มแรงบิดเริ่มต้นเป็น (ดูรูปที่ 4.7) แผนภาพวงจรสำหรับการเชื่อมต่อระยะตัวต้านทานเริ่มต้นจะแสดงในรูปที่ 4.2, 6
ข้าว. 4.26. วงจรสำหรับเชื่อมต่อตัวต้านทานสตาร์ทแบบอะซิงโครนัส
เครื่องยนต์.
4.11. การคำนวณตัวต้านทานสตาร์ทสำหรับมอเตอร์อะซิงโครนัส
การคำนวณตัวต้านทานสตาร์ทสำหรับมอเตอร์แบบอะซิงโครนัสที่มีโรเตอร์แบบพันแผลจะคล้ายกับการคำนวณตัวต้านทานสตาร์ทสำหรับมอเตอร์แบบสับเปลี่ยนและแบบอนุกรม มีความจำเป็นต้องคำนึงว่าในส่วนการทำงานของลักษณะทางกลของมอเตอร์แบบอะซิงโครนัสนั้นแรงบิดจะแปรผันตามกระแสดังนั้นการคำนวณจะดำเนินการสำหรับแรงบิดไม่ใช่สำหรับกระแส ค่าของแรงบิดเริ่มต้นสูงสุดถูกจำกัดโดยแรงไดนามิกในขดลวดและการทำความร้อนของเครื่อง ในบางกรณี ประเด็นนี้ถูกจำกัดด้วยข้อกำหนดทางเทคโนโลยี การคำนวณความต้านทานของตัวต้านทานเริ่มต้นสามารถทำได้โดยใช้วิธีการที่แน่นอนและโดยประมาณโดยใช้วิธีการวิเคราะห์และกราฟิก ลองพิจารณาวิธีการโดยประมาณซึ่งใช้สำหรับแรงบิดในการสลับสูงสุดไม่เกิน 0.7 แผนภาพเริ่มต้นสำหรับมอเตอร์แบบอะซิงโครนัสในสองขั้นตอนแสดงในรูปที่ 4.28
วิธีการวิเคราะห์ถ้ากำหนดจำนวนขั้น m แล้ว
ช่วงเวลาการสลับที่หลากหลาย ![]() (4.78)
(4.78)
โดยที่ความต้านทานสูงสุดของวงจรโรเตอร์ ณ เวลาที่เปิดเครื่องคือ ![]() - ระดับความต้านทาน
- ระดับความต้านทาน

รูปที่.4.28. แผนภาพสตาร์ทของมอเตอร์อะซิงโครนัส  , - ความต้านทานของโรเตอร์, ab
, - ความต้านทานของโรเตอร์, ab
หลังจากแทนค่าและ  (4.79)
(4.79)
ส่วน ab = และขนาดของส่วนจะถูกกำหนดจากที่คล้ายกัน
สามเหลี่ยม Oad และ ofl:
โฆษณา/อ่าว = lf/ของ;
ส่วน аО = ; ลฟ = 1; เจเอฟ = ดังนั้น:
โฆษณา= อ่าว lf/ของ = ; .
; .
ดังนั้น,
ค่าควรมากกว่านี้เช่น - โดยการเปรียบเทียบกับรถยนต์ กระแสตรง(บทที่ 2 และ 3)
เรามาพิจารณาความต้านทานกัน:
(4.80)
เมื่อไม่ได้ระบุจำนวนขั้นตอน เราจะนำค่าของช่วงเวลาการสลับ และ จากนั้นกำหนดจำนวนขั้นตอน m:
(4.81)
(4.82)
โดยที่ คือค่าเล็กน้อยของ EMF และกระแสโรเตอร์
ในการตรวจสอบจำเป็นต้องกำหนดความต้านทานของโรเตอร์และเปรียบเทียบกับวิธีกราฟิกที่ได้รับ ![]() (4.83)
(4.83)
4.12. ไดรฟ์ไฟฟ้าพร้อมมอเตอร์เชิงเส้น
ปัจจุบันมอเตอร์ไฟฟ้าแบบอนุกรมประมาณ 40-50% ถูกใช้ในกลไกการผลิตที่มีการเคลื่อนไหวแบบแปลหรือแบบลูกสูบของตัวเครื่อง เพื่อแปลง การเคลื่อนไหวแบบหมุนในการแปลมีการใช้อุปกรณ์ที่หลากหลาย: ระบบส่งกำลังแบบนิวแมติกและไฮดรอลิกคู่ "สกรู - น็อต" กลไกข้อเหวี่ยง เกียร์และแร็ค โครงสร้างล้อและรางในระบบขนส่ง ฯลฯ นอกจากนี้ ไดรฟ์ดังกล่าวมักจะใช้กระปุกเกียร์ ซึ่งเป็นบริเวณที่เกิดการสูญเสียและความล้มเหลวเพิ่มเติม
มอเตอร์แนวราบช่วยให้มีการเคลื่อนที่ในการแปลโดยตรงโดยไม่ต้องมีการสัมผัสทางกลระหว่างโครงสร้างหลัก (โดยปกติคือสเตเตอร์) และโครงสร้างรอง (โรเตอร์) ดังนั้นจึงไม่มีกลไกการส่งกำลัง ในขณะเดียวกัน แผนภาพจลนศาสตร์ก็ง่ายขึ้นอย่างมาก ความน่าเชื่อถือและความแม่นยำในการควบคุมเพิ่มขึ้น และมอเตอร์ไฟฟ้าเชิงเส้นเองก็ได้รับการปรับให้เข้ากับ ตัวกระตุ้นมีความสามารถในการผลิตในการผลิตและลดการใช้เหล็กเนื่องจากการตัดของเสียต่ำ
ในทางปฏิบัติจะใช้มอเตอร์กระแสตรงเชิงเส้น (ส่วนใหญ่เป็นสเต็ปเปอร์), อะซิงโครนัส (LAM), ซิงโครนัส (LSD) และแม่เหล็กไฟฟ้า (LEMD) มอเตอร์อะซิงโครนัสเชิงเส้นกำลังแพร่หลายเนื่องจากความเรียบง่ายของการออกแบบ ต้นทุนต่ำ ความสามารถในการผลิต ความน่าเชื่อถือ และความหลากหลาย โซลูชั่นที่สร้างสรรค์- โครงสร้าง LAD มีลักษณะเป็นทรงกระบอกและแบน
รูปที่ 4.29 แสดงอุปกรณ์ของ LIM แบบแบน
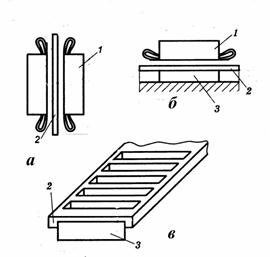
รูปที่.4.29. การออกแบบมอเตอร์อะซิงโครนัสเชิงเส้นแบบแบน:
ตัวเหนี่ยวนำ 1 ตัวพร้อมขดลวด (สเตเตอร์); 2- บัสปฏิกิริยา; 3- วงจรแม่เหล็กย้อนกลับ; a – LAD สองด้าน; b – LAD ข้างเดียว; c - ขดลวดลัดวงจรด้วยวงจรแม่เหล็กย้อนกลับ
พารามิเตอร์การเคลื่อนไหวของ LIM ได้รับการควบคุมในลักษณะเดียวกับ IM ทั่วไป: โดยการเปลี่ยนความต้านทานของรีแอกทีฟบัส ควบคุมความถี่และระยะเวลาของการเปิดเครื่อง LAD ถูกใช้ในสายพานลำเลียง, เครื่องหมุนของกรวยป้อนสินค้าจำนวนมาก, ยานพาหนะ, เครื่องมือช่างและอื่น ๆ ข้อได้เปรียบที่สำคัญ LAD ประกอบด้วย มูลค่าสูง.