Aktuálne motory priamy prúd nájdené široké uplatnenie v rôznych odvetviach. Jednosmerné motory sa používajú tam, kde sa vyžaduje plynulé a presné riadenie rýchlosti a krútiaceho momentu v širokom rozsahu. V tomto článku budem hovoriť o vytvorení riadiacej jednotky pre jednosmerný motor, ktorá by umožnila meniť otáčky hriadeľa motora a stabilizovať otáčky na určitej úrovni bez ohľadu na zaťaženie hriadeľa motora.
Vývoj je založený na princípe činnosti servopohonu s jednookruhovým riadiacim systémom.
Riadiaca jednotka sa skladá z nasledujúcich komponentov:
- SIFU (Pulse-Phase Control System)
- Regulátor
- Ochrana
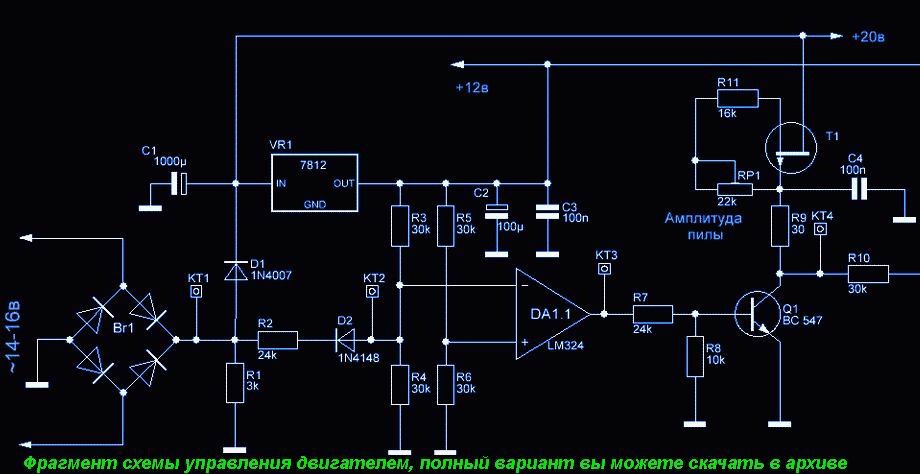
Schematický diagram pohonu je uvedený nižšie.
Väčšie
Pozrime sa bližšie na diagram.
Takže SIFU (Pulse-Phase Control System) - prevádza sínusové sieťové napätie na sériu pravouhlých impulzov smerujúcich k riadiacim elektródam výkonových tyristorov. Pri zapnutí riadiacej jednotky striedavé napätie 14-16V sa privádza do mostíkového usmerňovača D1, kde sa mení na pulzujúce napätie, ktoré slúži nielen na napájanie obvodu, ale aj na synchronizáciu chodu pohonu. Dióda D2 zabraňuje vyhladzovaniu impulzov kondenzátorom C1. Ďalej impulzy prichádzajú do „nulového detektora“ - DA1.1, zostaveného na jednom operačnom zosilňovači čipu LM324, ktorý pracuje v režime komparátora. Kým nedochádza k impulzu, napätia na priamom a inverznom vstupe sú približne rovnaké a komparátor je v rovnovážnom stave. Keď fáza prechádza cez „0“, na inverznom vstupe komparátora DA1.1 sa objavia impulzy, ktoré zohrávajú úlohu „nulového detektora“, spínajú komparátor, v dôsledku čoho sa na výstupe generujú obdĺžnikové synchronizačné impulzy. DA1.1, ktorého opakovanie je striktne viazané na fázový prechod cez „0“ “
Nižšie sú uvedené oscilogramy, ktoré vysvetľujú princíp fungovania. 
Zhora nadol: KT1, KT2, KT3.
Obvod bol simulovaný v Multisim 11. Tu je súbor projektu. Môžete si stiahnuť, spustiť a vidieť, ako tento uzol funguje.
Ďalej sa hodinové impulzy posielajú do integrátora s tranzistorovým spínačom (C4, Q1), kde sa generuje pílovité napätie. V momente, keď fáza prechádza cez „0“, hodinový impulz otvorí tranzistor Q1, ktorý vybije kondenzátor C4. Po doznievaní impulzu sa tranzistor uzavrie a kondenzátor sa nabíja, kým nepríde ďalší hodinový impulz, výsledkom čoho je Q1 na kolektore (oscilátor KT4). vzniká lineárne rastúce pílovité napätie stabilizované stabilným generátorom prúdu, ktorý je vytvorený na tranzistore T1 s efektom poľa. Amplitúda „píly“ rovná 9V je nastavená orezávacím odporom RP1. Napätie „píly“ sa privádza na priamy vstup komparátora DA1.2.
Referenčné napätie je privedené na inverzný vstup komparátora DA1.2 a v momente, keď pílové napätie prekročí napätie na inverznom vstupe komparátora, komparátor sa prepne a na výstupe komparátora sa vytvorí impulz (oscilácia KT4). Impulz je diferencovaný cez reťazec R14, C6 a ide do bázy tranzistora Q2. Tranzistor sa otvorí a pulzný transformátor Tr1 generuje otváracie impulzy pre výkonové tyristory. Zvyšovaním (znižovaním) referenčného napätia sa mení pracovný cyklus impulzov v CT5.
Tu sú oscilogramy. 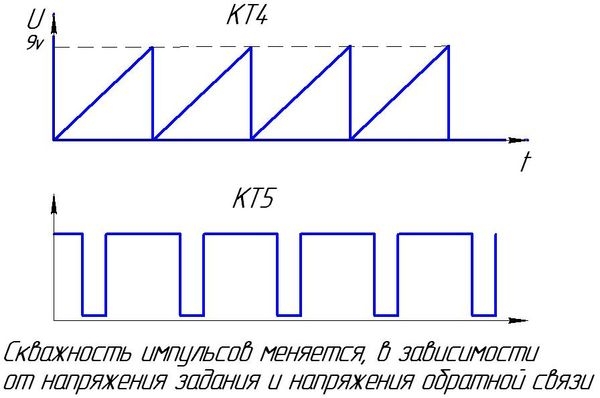
V KT5 však neuvidíme žiadne impulzy, kým nestlačíme tlačidlo „Štart“ - S1. Keď tlačidlo nie je stlačené, napájacie napätie +12V cez normálne zopnuté kontakty S1 pozdĺž reťazca R12, D3 sa privádza na inverzný vstup DA1.2 a rovná sa asi 11V. Keďže toto napätie presahuje „pilové“ napätie 9V, komparátor je zablokovaný a negenerujú sa riadiace impulzy na otváranie tyristorov. Aby sa predišlo nehode a poruche motora, ak obsluha nenastaví regulátor otáčok na „0“, obvod zabezpečuje akceleračnú jednotku C5, R13, ktorá slúži na plynulé zrýchlenie motora. V režime „Štart“ obvod funguje nasledovne: keď stlačíte tlačidlo „Štart“, normálne zatvorené kontakty sa otvoria a kondenzátor C5 pozdĺž reťazca - „uzemnenie“, R13, - C5 sa začne hladko nabíjať a napätie sa zapne záporná doska kondenzátora hladko smeruje k nule. Súčasne sa plynulo zvýši napätie na invertujúcom vstupe DA1.2 na hodnotu určenú referenčným napätím a komparátor začne generovať riadiace impulzy pre výkonové tyristory. Doba nabíjania je určená hodnotami C5, R13. Ak je počas chodu motora potrebné zmeniť jeho otáčky, aby sa predišlo náhlym skokom otáčok, okruh zabezpečuje jednotku „zrýchľovanie-brzdenie“ R21, C8, R22. Keď sa referenčné napätie zvýši (zníži), kondenzátor C8 sa hladko nabije (vybije), čo zabráni prudkému „návalu“ napätia na inverznom vstupe zosilňovača a v dôsledku toho zabráni prudkému zvýšeniu otáčok motora.
Teraz sa pozrime na princíp fungovania regulátor rýchlosti.
Regulátor je navrhnutý tak, aby udržiaval konštantné otáčky motora v regulačnej zóne. Regulátor je diferenciálny zosilňovač so súčtom dvoch napätí: referenčného napätia a napätia spätná väzba. Referenčné napätie je nastavené odporom RP1 a je napájané cez filter R20, C8, R21, ktorý súčasne vykonáva funkcie jednotky „zrýchlenie-brzdenie“ a privádza sa na inverzný vstup regulátora operačného zosilňovača DA1.3. Keď sa referenčné napätie na výstupe operačného zosilňovača DA1.3 zvyšuje, výstupné napätie lineárne klesá.
Výstupné napätie regulátora sa privádza na inverzný vstup komparátora SIFU DA1.2, kde sa v súčte s pílovitými napäťovými impulzmi premieňa na sériu pravouhlých impulzov smerujúcich do riadiacich elektród tyristorov. So zvyšujúcim sa (klesajúcim) referenčným napätím stúpa (klesá) aj výstupné napätie na výstupe pohonnej jednotky.
Tento graf znázorňuje závislosť otáčok motora od referenčného napätia. 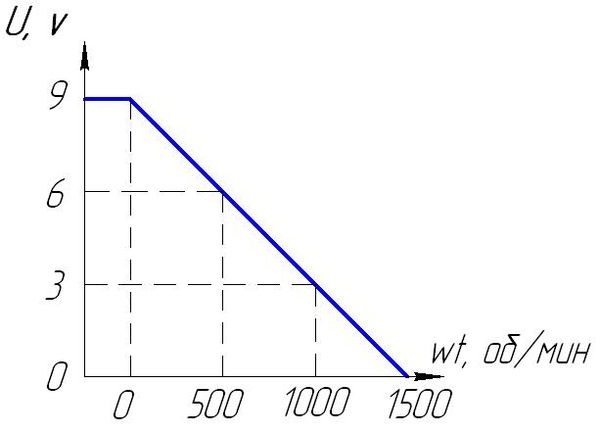
Hodnoty otáčok motora sú uvedené ako príklad.
Delič napätia R22, R23 pripojený na priamy vstup regulátora DA1.3 slúži na zabránenie zlyhaniu motora pri prerušení spätnej väzby (ak je spätná väzba prerušená, motor prejde do rázu).
Keď je pohon zapnutý, tachogenerátor začne generovať napätie úmerné otáčkam motora. Toto napätie sa privádza na vstup presného detektora DA1.4, DA2.1 zostaveného pomocou celovlnného obvodu. Napätie odobraté z výstupu presného detektora DA1.4, DA2.1 je privádzané cez filter C10, R30, R33 do zosilňovača škálovacej spätnej väzby DA2.2. Zosilňovač sa používa na nastavenie spätnoväzbového napätia prichádzajúceho z tachogenerátora. Napätie z výstupu operačného zosilňovača DA2.2. je napájaný ako na vstup regulátora DA1.3, tak aj na ochranný obvod DA2.3.
Rezistor RP1 nastavuje otáčky motora. Keď motor beží bez záťaže, napätie na výstupe škálovacieho zosilňovača je nižšie ako napätie na kolíku 6 operačného zosilňovača DA1.3. ≈ +5v, takže pohon funguje ako regulátor. Keď sa zaťaženie hriadeľa motora zvyšuje, napätie prijímané z tachogenerátora klesá a v dôsledku toho sa znižuje napätie z výstupu zosilňovača mierky.
Keď je toto napätie nižšie ako napätie na kolíku 5 operačného zosilňovača DA1.3, pohon vstúpi do aktuálnej stabilizačnej zóny. Zníženie napätia na neinvertujúcom vstupe operačného zosilňovača DA1.3 vedie k zníženiu napätia na jeho výstupe a keďže pracuje na invertujúcom zosilňovači DA1.2, vedie to k väčšiemu uhlu otvorenia tyristorov a následne k zvýšeniu napätia na kotve motora.
OCHRANNÝ OBVOD
Ochrana proti prekročeniu otáčok je určená na ochranu motora pred nehodou pri náhlom prekročení nastavených otáčok motora. Obvod je zostavený pomocou operačného zosilňovača DA2.3, zapojeného podľa obvodu komparátora. Referenčné napätie z deliča R36, R37, RP3 sa privádza na inverzný vstup komparátora. Rezistor RP3 nastavuje prah ochrany. Napätie z výstupu škálovacieho zosilňovača DA2.2 sa privádza na priamy vstup komparátora ochrany DA2.3. Keď otáčky motora prekročia menovité otáčky, napätie na priamom vstupe komparátora prekročí prah nastavenia ochrany určený RP3 - komparátor prepne. V dôsledku prítomnosti kladnej spätnej väzby v obvode spôsobuje R38 „kliknutie“ komparátora a prítomnosť diódy VD12 bráni resetovaniu komparátora. Keď je ochrana spustená, napätie z výstupu komparátora ochrany (≈ +11v) cez diódu VD14 sa privádza na inverzný vstup 13 DA1.2 SIFU, a keďže ochranné napätie presahuje napätie „pila“ (= 9V ) - vydávanie riadiacich impulzov k riadiacim je okamžite zakázané tyristorovým elektródam. Napätie z výstupu komparátora ochrany DA2.3 otvorí tranzistor VT4, čo spôsobí činnosť relé P1.1 a rozsvietenie LED VL1, čo signalizuje núdzový stav. Ochranu môžete odstrániť iba úplným odpojením pohonu od napätia a po 5 - 10 sekundovej prestávke jeho opätovným zapnutím.
Výkonová časť riadiacej jednotky.
Schéma výkonovej časti je uvedená nižšie 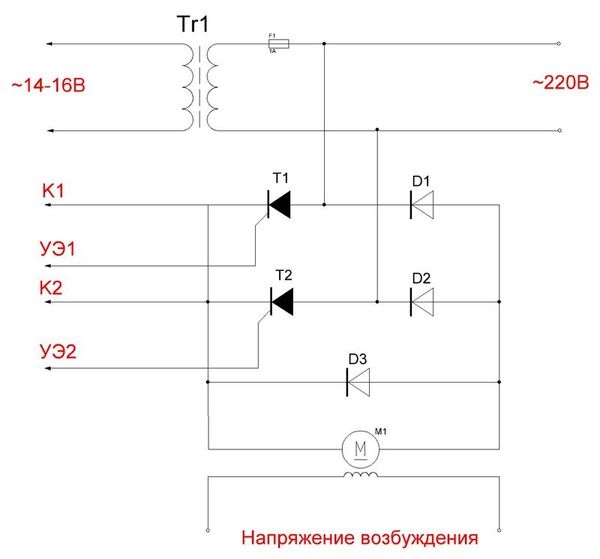
Transformátor Tr1 je určený na napájanie obvodu riadiacej jednotky. Riadený usmerňovač je zostavený pomocou polomostíkového symetrického obvodu a obsahuje dve výkonové diódy D1, D2
a dva výkonové tyristory T1, T2 a ochrannú diódu D3. Poľné vinutie je napájané vlastným samostatným transformátorom a usmerňovačom.
Ak motor nemá tachogenerátor, spätnú väzbu na reguláciu rýchlosti možno vykonať takto:
1. Použite prúdový transformátor pripojený k silovému obvodu riadeného usmerňovača 
Ak je použitý prúdový transformátor, umiestnite prepojku P1 na schému riadiacej jednotky
do polohy 1-3 je to potrebné, pretože so zvyšujúcim sa zaťažením sa zvýši prúd kotvy, preto sa zvýši aj napätie odobraté z prúdového transformátora, takže spätnoväzbové napätie musí byť aplikované na invertujúci
výstup čipu DA1.3. Môžete tiež nainštalovať štandardný prúdový bočník, ale iba v obvode kotvy motora, za usmerňovačom a odstrániť z neho spätnoväzbový signál.
2. Použite snímač napätia kotvy. Diagram je uvedený nižšie. 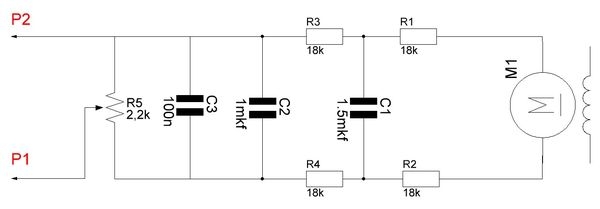
Snímač napätia kotvy je filter-delič a je pripojený priamo na svorky kotvy elektromotora. Pohon je nakonfigurovaný nasledovne. Rezistory „Task“ a „Scaling Uoc“ sú nastavené do strednej polohy. Rezistor R5 snímača napätia kotvy je umiestnený v spodnej polohe „zem“. Zapneme pohon a nastavíme napätie na kotve motora na približne 110 voltov. Riadením napätia na kotve motora začneme otáčať odpor R5. V určitom bode regulácie sa napätie na kotve začne znižovať, čo naznačuje, že spätná väzba začala fungovať.
Teraz prejdime k návrhu a úprave riadiacej jednotky.
Riadiaca jednotka bola vyrobená na doske plošných spojov (súbor PCB) 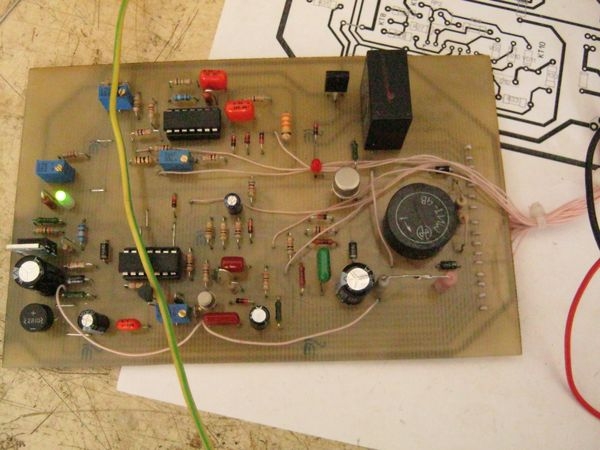

Doska je pripojená vodičom MGTF ku konektoru pre ľahkú demontáž pri opravách.
nastavenie
Počas nastavovania bola výkonová časť zostavená pomocou inštalácie na stenu a ako záťaž bola použitá bežná žiarovka. 
Nastavenie začíname kontrolou napájacích napätí a napájacieho napätia na operačných zosilňovačoch DA1, DA2. Je vhodné inštalovať mikroobvody do zásuviek. Potom sledujeme oscilogramy v kontrolných bodoch KT1, KT2, KT3 (oscilogramy v týchto bodoch sú uvedené na začiatku popisu SIFU). Teraz umiestnime osciloskop do kontrolného bodu KT4. Mali by existovať pílovité impulzy, ako na osilograme vyššie (tlačidlo „Štart“ by malo byť v tejto chvíli otvorené). Pomocou rezistora trimra RP1 je potrebné nastaviť výkyv „píly“ na 9 voltov, čo je veľmi dôležitý bod, pretože to určuje ďalšiu prácu schémy. Pretože rozptyl v parametroch tranzistorov s efektom poľa môže byť dosť významný, možno rozsah nastavenia RP1 nemusí stačiť, potom výberom hodnoty odporu R10 dosiahnite požadovaný rozsah. V kontrolnom bode KT3 by trvanie impulzu malo byť 1,5 - 1,8 ms, ak nie, potom zvoľte odpor R4 (smerom k poklesu), aby ste dosiahli požadované trvanie.
Otáčaním regulátora RR1 v riadiacom bode KT5 skontrolujte zmenu pracovného cyklu impulzov z maxima na ich úplné vymiznutie, keď je posúvač RR1 v spodnej polohe. V tomto prípade by sa mal zmeniť jas žiarovky pripojenej k napájacej jednotke.
Ďalej pripojíme riadiacu jednotku k motoru a tachogenerátoru. Nastavíme ho regulátorom RR1
napätie kotvy je asi 40-50 voltov. Rezistor RP3 by mal byť nastavený do strednej polohy. Riadením napätia na kotve motora začneme otáčať odpor RP3. V určitom bode regulácie sa napätie na kotve začne znižovať, čo naznačuje, že spätná väzba začala fungovať. Pre tých, ktorí chcú experimentovať: na zvýšenie tuhosti pohonu môžete tiež zvýšiť odpor R24, čím sa zvýši zisk regulátora, alebo zvýši odpor R32.
Ak sa používa spätná väzba prúdu kotvy motora.
Na to, ako je uvedené vyššie, potrebujete prúdový transformátor zahrnutý v napájacom obvode
riadený usmerňovač. Kalibračný diagram prúdového transformátora je uvedený nižšie. Výberom odporu získajte na výstupe transformátora striedavé napätie ≈ 2 ÷ 2,5 V. Výkon záťaže RN1 musí zodpovedať výkonu motora. 
Pozor! Nezapínajte prúdový transformátor bez zaťažovacieho odporu.
Prúdový transformátor pripojíme k spätnoväzbovému obvodu P1 a P2. Pri nastavovaní „Regulátora“ je vhodné odspájkovať diódu D12, aby sa predišlo falošnému spusteniu ochrany.
Oscilogramy v kontrolných bodoch KT8, KT9, KT10 by mali byť ako na obrázku nižšie. 
Ďalšie nastavenia sú rovnaké ako v prípade použitia tachogenerátora.
Ak sa používa spätná väzba napätia kotvy motora.
Ako je uvedené vyššie, na tento účel môžete použiť spätnú väzbu napätia kotvy. Riadiaca jednotka je nakonfigurovaná nasledovne. Rezistory „Task“ a „Scaling Uoc“ sú nastavené do strednej polohy. Rezistor R5 snímača napätia kotvy je umiestnený v spodnej polohe „zem“. Zapneme pohon a nastavíme napätie na kotve motora na približne 110 voltov. Riadením napätia na kotve motora začneme otáčať odpor R5. V určitom bode regulácie sa napätie na kotve začne znižovať, čo naznačuje, že spätná väzba začala fungovať.
Táto riadiaca jednotka bola vyrobená pre vyvrtávačku. Tu je fotka tohto monštra 

Na tomto stroji zlyhal elektrický strojový zosilňovač, ktorý ovládal jednosmerný motor pre pohyb stola.
Tu je zosilňovač elektrického stroja. 
Namiesto toho bola vyrobená táto riadiaca jednotka.
Tu je fotografia samotného DC motora. 
Riadiaca jednotka bola zostavená na izolačnom podstavci, kde sú umiestnené všetky hlavné prvky. 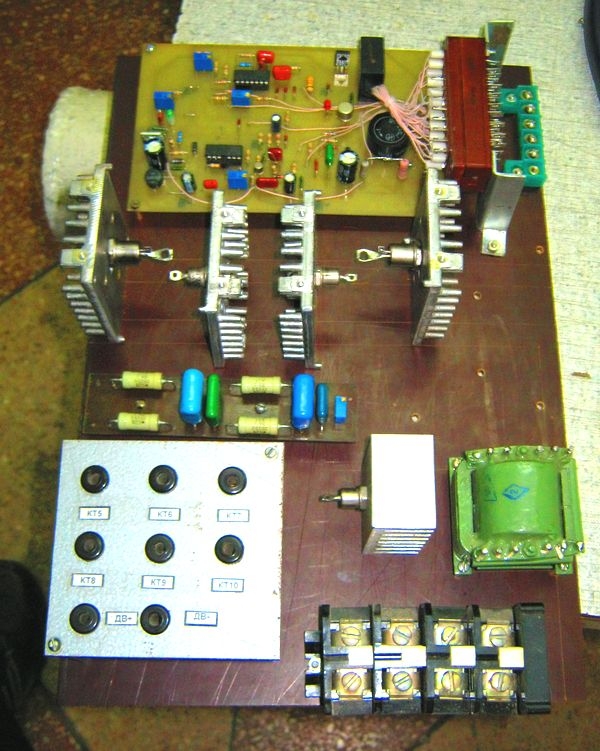
Výkonové diódy a tyristory sú inštalované na chladičoch. Vyrobil sa aj panel s konektormi, kde boli vyvedené signály z riadiacich bodov obvodu. Toto bolo urobené pre jednoduché nastavenie a opravu priamo na stroji.
Tu je namontovaná riadiaca jednotka v napájacej skrini stroja 


Na druhej strane rozvodnej skrine bol nainštalovaný malý ovládací panel. 
Obsahuje:
- prepínač na zapnutie jednotky
- prepínač prevádzkového režimu. Pretože pre montážne pohyby stola stroja nie je potrebné presné riadenie a stabilizácia otáčok, spätnoväzbový obvod sa počas tejto doby premosťuje.
- gombíky na nastavenie počtu otáčok. Boli dodané dva variabilné odpory, jeden na hrubé nastavenie, druhý - viacotáčkový - na presné nastavenie požadovaných otáčok pri hrubom a jemnom vyvrtávaní súčiastky.
Pre záujemcov nižšie video stroja v prevádzke. Najprv je znázornený otvor otvoru oceľový plech hrúbka 20 mm. Potom sa ukáže, akou frekvenciou sa otáča podávacia skrutka stola stroja. Pri tejto rýchlosti sa súčiastka privádza k fréze a túto rýchlosť otáčania podávacej skrutky zabezpečuje jednosmerný motor, pre ktorý sa to vlastne všetko robilo.
Riadiaca jednotka fungovala dobre, nevyskytli sa žiadne poruchy ani havárie.
Tam, kde sa vyžaduje plynulé a presné riadenie otáčok a krútiaceho momentu elektromotora v širokom rozsahu, je potrebný riadiaci obvod jednosmerného motora
SIFU - Pulse-Phase Control System vykonáva sínusovú konverziu sieťového napätia na sekvenciu pravouhlých impulzov, ktoré prúdia na riadiace svorky výkonových tyristorov. Keď je obvod zapnutý, do mostíkového usmerňovača prechádza striedavé napätie 14 - 16 voltov a mení sa na pulzujúce napätie, ktoré slúži nielen na napájanie konštrukcie, ale aj na synchronizáciu činnosti zariadenia. Dióda D2 nevyhladzuje impulzy kondenzátora C1. Potom impulzy nasledujú k „nulovému detektoru“ vytvorenému na operačnom zosilňovači LM324, prvok DA1.1, zapnutom v režime komparátora. Aj keď neexistujú žiadne impulzy, napätia na priamych a inverzných vstupoch operačného zosilňovača sú približne rovnaké a komparátor je vyvážený.
Keď sínusoida prechádza nulovým bodom, na inverznom vstupe komparátora sa objavia impulzy, ktoré komparátor spínajú, v dôsledku čoho sa na výstupe DA1.1 generujú obdĺžnikové synchronizačné impulzy, ktorých perióda opakovania závisí od nuly. bod. Pozrite sa na oscilogramy, aby ste pochopili princíp fungovania. Zhora nadol: KT1, KT2, KT3.
V programe bol simulovaný obvod riadenia jednosmerného motora. Archivované s plná verzia Predmetný dizajn má súbor projektu pre tento program. Môžete ho otvoriť a vizuálne vidieť, ako táto jednotka funguje, a podľa toho vyvodiť konečné závery o ovládaní jednosmerného motora predtým, ako začnete zostavovať domáci rádioamatérsky výrobok.
Vráťme sa k práci – hodinové impulzy idú do integrátora s tranzistorovým spínačom (C4, Q1), kde sa generuje pílovité napätie. V momente prechodu fázy cez nulový bod hodinový impulz odblokuje prvý tranzistor, ktorý vybije kapacitu C4. Po doznení impulzu sa tranzistor vypne a kapacita sa nabíja až do príchodu ďalšieho hodinového impulzu, v dôsledku čoho sa na kolektore tranzistora (oscilogram KT4) vytvorí lineárne rastúce pílovité napätie, stabilizované stabilným generátorom prúdu zapnutým. unipolárny tranzistor T1.
Amplitúda pílového napätia asi 9 voltov sa nastavuje rezacím odporom RP1. Toto napätie je privedené na priamy vstup komparátora DA1.2. Referenčné napätie nasleduje po inverznom vstupe komparátora DA1.2 a v momente, keď amplitúda pílového napätia prekročí napätie na inverznom vstupe, sa komparátor prepne do opačného stavu a na jeho výstupe sa vygeneruje impulz (oscilogram KT4 ).
Impulz je diferencovaný cez reťaz pasívnych rádiových súčiastok R14, C6 a nadväzuje na bázu druhého bipolárneho tranzistora, ktorý sa vďaka tomu otvára a na impulznom transformátore vznikajú otváracie impulzy výkonových tyristorov. Zvýšením alebo znížením referenčného napätia môžete upraviť pracovný cyklus impulzov v CT5.
Ale na oscilograme KT5 neuvidíme žiadne impulzy, kým nestlačíme prepínač S1. Keď sa nestlačí, napájacie napätie +12V cez predné kontakty S1 až R12, D3 ide na inverzný vstup DA1.2. Keďže toto napätie je vyššie ako „pilové“ napätie, komparátor sa zatvára a impulzy otvárajúce tyristory sa negenerujú.
Aby sa predišlo núdzovým situáciám a poškodeniu elektromotora, ak regulátor otáčok nie je nastavený na „0“, obvod má akceleračnú jednotku na prvkoch C5, R13, určenú na plynulé zrýchlenie motora.
Po stlačení prepínača S1 sa kontakty otvoria a kapacita C5 sa začne hladko nabíjať a napätie na zápornej doske kondenzátora sa priblíži k nule. Napätie na invertujúcom vstupe DA1.2 sa zvýši na hodnotu referenčného napätia a komparátor začne generovať impulzy na otváranie výkonových tyristorov. Dobu nabíjania určujú rádiové komponenty C5, R13.
Ak je počas chodu motora potrebné upraviť jeho otáčky, do okruhu pribudla akceleračná a brzdová jednotka R21, C8, R22. Keď sa cieľové napätie zvýši alebo zníži, kapacita C8 sa hladko nabije alebo vybije, čo eliminuje prudký „nával“ napätia na inverznom vstupe a v dôsledku toho eliminuje prudké zvýšenie otáčok motora.
Regulátor slúži na udržiavanie konštantných otáčok v regulačnej zóne. Regulátor je vyrobený na základe diferenciálneho zosilňovača so súčtom dvoch napätí: referenčného a spätného. Referenčné napätie je tvorené odporom RP1 a prechádza cez filter na súčiastkach R20, C8, R21, ktorý funguje ako jednotka zrýchlenia a spomalenia a je privedené na inverzný vstup DA1.3. Keď sa referenčné napätie na výstupe DA1.3 zvyšuje, výstupné napätie lineárne klesá.
Výstupné napätie regulátora nasleduje na inverzný vstup komparátora SIFU DA1.2, kde sa v súčte s „pílovými“ impulzmi zmení na sériu pravouhlých impulzov, ktoré putujú k elektródam tyristorov. Keď sa referenčné napätie zvyšuje alebo znižuje, výstupné napätie na výstupe pohonnej jednotky sa tiež zvyšuje alebo znižuje. V grafe je znázornená závislosť otáčok motora od referenčného napätia.
Delič napätia na rezistoroch R22, R23 pripojený k priamemu vstupu regulátora DA1.3 je určený na odstránenie havarijnej situácie pri prerušení spätnej väzby.
Keď je pohon zapnutý, tachogenerátor generuje napätie úmerné rýchlosti elektromotora. Toto napätie ide na vstup presného detektora DA1.4, DA2.1, postaveného podľa klasického celovlnného obvodu. Z jeho výstupu nasleduje napätie cez filter do pasívne komponenty C10, R30, R33 do škálovacieho zosilňovača DA2.2 OS. Zosilňovač sa používa na nastavenie napätia OS prichádzajúceho z tachogenerátora. Napätie z výstupu DA2.2 ide na vstup DA1.3 a do ochranného obvodu DA2.3.
Odpor RP1 generuje otáčky motora. Pri prevádzke bez záťaže je napätie na výstupe škálovacieho zosilňovača menšie ako napätie na šiestom kolíku DA1.3, takže pohon funguje ako regulátor.
Keď sa zaťaženie hriadeľa zvyšuje, napätie odvádzané z tachogenerátora klesá a v dôsledku toho sa znižuje napätie z výstupu zosilňovača mierky. Keď je táto úroveň nižšia ako časť 5 operačného zosilňovača DA1.3, pohon vstúpi do aktuálnej stabilizačnej zóny. Znížením napätia na neinvertujúcom vstupe DA1.3 sa zníži napätie na jeho výstupe a keďže pracuje na invertujúcom zosilňovači DA1.2, zväčší sa tým uhol otvorenia tyristorov a tým sa zvýši úroveň pri kotva elektromotora.
Ochrana proti prekročeniu rýchlosti je namontovaná na operačnom zosilňovači DA2.3, zapojenom ako komparátor. Jeho inverzný vstup prijíma referenčné napätie z deliča R36, R37, RP3. Odpor RP3 reguluje úroveň prevádzky ochrany. Napätie z výstupu zosilňovača DA2.2 ide na priamy vstup DA2.3.
Pri prekročení otáčok nad nominálnu hodnotu je na priamom vstupe komparátora a prepínačov komparátora prekročený prah nastavenia ochrany určený odporom RP3.
V dôsledku prítomnosti pozitívnej spätnej väzby v obvode R38 spôsobí, že sa komparátor „zablokuje“ a dióda VD12 neumožňuje resetovanie komparátora. Keď je ochrana spustená, výstup komparátora prechádza diódou VD14 na inverzný vstup 13 DA1.2 SIFU a keďže ochranné napätie je vyššie ako úroveň „pila“, vysielanie riadiacich impulzov na elektródy výkonových tyristorov budú okamžite zakázané.
Napätie z výstupu komparátora ochrany DA2.3 odblokuje tranzistor VT4, čím sa zopne relé P1.1 a rozsvieti sa LED signalizujúca nehodu. Ochranu môžete odstrániť, ak úplne vypnete disk a po prestávke 5 - 10 sekúnd ho znova zapnete.
Výkonová časť riadiacej jednotky je znázornená na obrázku nižšie:
Transformátor Tr1 slúži na napájanie obvodu riadiacej jednotky. Usmerňovač je zostavený pomocou polovičného mostíka a obsahuje dve výkonové diódy D1, D2 a dva výkonové tyristory T1, T2, ako aj ochrannú diódu D3. Poľné vinutie je napájané vlastným samostatným transformátorom a usmerňovačom. Ak motor nemá tachogenerátor, potom je možné OS na riadenie rýchlosti implementovať takto:

V prípade potreby prúdový transformátor, potom musí byť prepojka P1 na schéme riadiacej jednotky jednosmerného motora nastavená do polohy 1-3.
Môžete tiež použiť snímač napätia kotvy:

Snímač napätia kotvy je filter-delič pripojený priamo na svorky kotvy. Pohon je nakonfigurovaný nasledovne. Odpory „Task“ a „Scaling Uoc“ sú otočené do strednej polohy. Odpor R5 snímača napätia kotvy je otočený na minimum. Zapneme pohon a nastavíme napätie kotvy na cca 110 voltov. Meraním napätia na kotve začneme otáčať odpor R5. V určitom okamihu zmeny začne napätie na kotve klesať, čo naznačuje, že OS fungoval.
Nákres plošného spoja na ovládanie jednosmerného motora je urobený v programe a môžete si ho jednoducho vyrobiť vytlačená obvodová doska metóda urob si sám
Začnime s nastavením dizajnu kontrolou napájacích napätí na operačných zosilňovačoch DA1, DA2. Odporúča sa inštalovať mikroobvody do zásuviek. Potom skontrolujeme oscilogramy v kontrolných bodoch KT1, KT2, KT3. V bode CT4. pri otvorenom tlačidle by sme mali vidieť pulzy pílových zubov.
Pomocou ladiaceho odporu RP1 nastavíme výkyv „píly“ na cca 9 voltov. V riadiacom bode KT3 je trvanie impulzu cca 1,5 - 1,8 ms ak toto nevidíme, tak znížením odporu R4 dosiahneme požadovanú dobu trvania.
Otáčaním páčky RR1 v riadiacom bode KT5 riadime zmenu pracovného cyklu impulzov z maxima na ich úplné vymiznutie s minimálnym odporom RR1. V tomto prípade by sa mal zmeniť jas žiarovky pripojenej k napájacej jednotke, ktorú sme pripojili ako záťaž.
Potom pripojíme riadiacu jednotku k motoru a tachogenerátoru. Pomocou regulátora RR1 nastavíme napätie kotvy na 40-50 voltov. Odpor RP3 by mal byť v strednej polohe. Meraním napätia na kotve motora otáčame odpor RP3. V určitom bode nastavenia začne napätie na kotve klesať, čo naznačuje, že spätná väzba fungovala.
Ak sa používa spätná väzba prúdu kotvy, je potrebný prúdový transformátor pripojený k napájaciemu obvodu usmerňovača. Kalibračný obvod prúdového transformátora je popísaný nižšie. Výberom odporu získajte na výstupe transformátora striedavé napätie 2 ÷ 2,5 V. Výkon záťaže RN1 sa musí rovnať výkonu motora
Pamätajte, že sa neodporúča zapínať prúdový transformátor bez zaťažovacieho odporu.
Prúdový transformátor pripojíme k obvodu OS P1 a P2. Pri nastavovaní sa odporúča odspájkovať diódu D12, aby sa predišlo falošnému spusteniu ochrany. Oscilogramy v kontrolných bodoch KT8, KT9, KT10 sú znázornené na obrázku nižšie.

Ďalšie nastavenie je rovnaké ako v prípade použitia tachogenerátora.
Táto riadiaca jednotka jednosmerného motora bola vyrobená ručne pre vyvrtávačku. Pozrite si fotografie v archíve na zelenom odkaze vyššie.
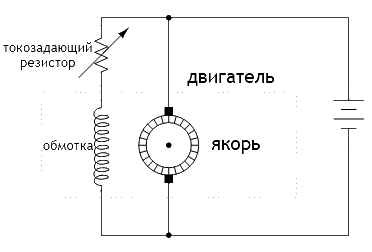
V jednosmerných motoroch je krútiaci moment generovaný reakciou medzi dvoma magnetickými poľami: jedno pole je vytvorené stacionárnym poľným vinutím a druhé vinutiami v rotačnej kotve. Niektoré jednosmerné motory nemajú vinutie poľa, ale namiesto toho majú veľké permanentné magnety, ktoré udržujú stacionárne magnetické pole konštantné za všetkých prevádzkových podmienok.
V každom prípade princíp činnosti jednosmerného motora spočíva v tom, že prúd prechádzajúci kotvou vytvára magnetické pole, ktoré sa snaží vyrovnať so stacionárnym poľom. A tak sa kotva otáča:
však zberateľ(tzv. sada segmentovaných medených pásikov), preruší elektrický kontakt s už „zarovnaným“ vinutím a vybudí ďalšie vinutie (alebo ako napr. jednoduchý príklad, znázornené vyššie, prebudí rovnaký obvod v opačnom smere), čím sa vytvorí ďalšie nesprávne zarovnané magnetické pole, ktoré pokračuje v otáčaní kotvy. Elektrický kontakt medzi rotujúcimi segmentmi komutátora a stacionárnym zdrojom energie prebieha cez uhlíkové kefky. Tieto kefy sa potom opotrebujú určitý čas(ako samotný kolektor), a preto vyžadujú pravidelnú výmenu.
Väčšina priemyselných jednosmerných motorov sa vyrába s viacerými vinutiami kotvy, a nie iba s jedným, ako je znázornené na zjednodušenom obrázku vyššie. Fotografia veľkého (1250 k) elektromotora na jednosmerný prúd, ktorý sa používa na pohon trajektu, s vinutím a kotvou, je zobrazená tu:

Jedna zostava kefiek tohto elektromotora ukazuje detailný pohľad na obe uhlíkové kefky, odpružený držiak a mnohé lišty komutátora, s ktorými sa kefa dotýka, keď sa kotva otáča.

V jednosmerných motoroch sa objavujú nasledujúce vzťahy medzi mechanickými a elektrickými veličinami:
Krútiaci moment:
- Krútiaci moment je priamo úmerný sile magnetického poľa kotvy, ktoré je zase priamo úmerné prúdu prechádzajúcemu vinutím kotvy;
- Krútiaci moment je tiež priamo úmerný sile konštantného magnetického poľa, ktoré je zase priamo úmerné prúdu prechádzajúcemu budiacim vinutím (v motore bez magnetov).
- Rýchlosť je obmedzená emf generovaným kotvou pri rotácii v konštantnom magnetickom poli. Toto EMF je priamo úmerné rýchlosti otáčania kotvy a je tiež priamo úmerné sile konštantného magnetického poľa (ktoré je priamo úmerné prúdu budiaceho vinutia v elektromotore bez magnetov);
- Preto je rýchlosť priamo úmerná napätiu kotvy;
- Taktiež rýchlosť je nepriamo úmerná sile konštantného magnetického poľa, ktoré je priamo úmerné prúdu prechádzajúcemu budiacimi vinutiami (v motore bez magnetov).

Klesajúci odpor rezistora s nastavením prúdu umožňuje, aby cez budiace vinutie pretekalo viac prúdu, čím sa zvyšuje jeho magnetické pole. To bude mať dva účinky na činnosť motora: po prvé, motor bude produkovať väčší krútiaci moment ako predtým (pri rovnakom množstve prúdu kotvy), pretože na kotvu bude pôsobiť silnejšie magnetické pole kotvy; po druhé, rýchlosť motora sa zníži, pretože rotujúca kotva bude generovať veľké spätné EMF pri rovnakej rýchlosti otáčania a toto spätné EMF sa prirodzene pokúsi vyrovnať aplikovanému napätiu jednosmerného zdroja. Na druhej strane môžeme zvýšiť rýchlosť jednosmerného motora (a znížiť výstupný krútiaci moment) zvýšením odporu riadiaceho odporu, oslabením stacionárneho magnetického poľa, ktoré otáča kotvu.
Úpravou prúdu vinutia môžete zmeniť rovnováhu medzi rýchlosťou a krútiacim momentom, ale to nestačí na ovládanie celku moc motora. Na riadenie výkonu jednosmerného motora musíme ovládať aj napätie a prúd kotvy. Pre túto úlohu je možné použiť variabilné odpory, ale táto metóda sa v súčasnosti nepoužíva, pretože vedie k strate energie.
Najlepším riešením by bolo použiť elektronický obvod riadenia výkonu tranzistorové spínače rýchle vypnutie a zapnutie kotvy motora v obvode. Tento typ riadenia sa nazýva modulácia šírky impulzov alebo PWM.
(pomer trvania pulzu k perióde opakovania, inverzný k pracovný cyklus Veľkosť impulzu určuje časť výkonu dodaného do motora:

Na obrázkoch chyba nie je „faktor cla“, ale „faktor cla“
Takéto elektronický obvod regulácia výkonu sa zvyčajne nazýva riadiť. Teda pohon s variabilná rýchlosť(alebo VSD) je vysokovýkonný obvod používaný na riadenie rýchlosti jednosmerného motora. Motorové pohony môžu byť manuálne nastavené tak, aby spúšťali motor pri danej rýchlosti, alebo môžu prijímať elektronické riadiace signály na zmenu rýchlosti motora rovnakým spôsobom, akým elektronické signály riadia pohyb. Vybavený vzdialený systém vysielanie riadiacich signálov, pohon funguje ako každý iný koncový aktuátor: na základe príkazov ovládača stabilizuje určitý technologický parameter.
Autor: tradičnou technológiou Pre Meniť zdroj energie obvod použitia jednosmerného motora riadený usmerňovač, v ktorom sa transformovať striedavý prúd V jednosmernom prúde sa namiesto bežných usmerňovacích diód používajú tyristory. Hlavným zdrojom energie pre priemyselné jednosmerné motory zostáva striedavý prúd a tento striedavý prúd sa musí v určitom bode systému premeniť na jednosmerný prúd; Má zmysel integrovať riadenie priamo do tejto jednotky usmerňovača:

Riadený obvod usmerňovača funguje na princípe zmeny času „štartovacieho“ impulzu vzhľadom na impulzy oscilácie striedavého prúdu. Čím skôr v každom cykle striedavého prúdu sa tyristor otvorí, tým dlhšie umožní prúdenie prúdu do motora. Fázový riadiaci obvod je zodpovedný za generovanie impulzov a ich trvanie.
Jednosmerný pohon, ktorý jednoducho reguluje výkon motora, by bol hrubý a ťažko ovládateľný pre väčšinu procesov. Čo by ste v ideálnom prípade chceli od pohonu s premenlivou rýchlosťou, je presné ovládanie. rýchlosť motora. Z tohto dôvodu je väčšina pohonov navrhnutá tak, aby prijímala spätnú väzbu z tachometra mechanicky pripojeného k hriadeľu motora. Tachometer je zvyčajne malý generátor, ktorý vytvára konštantný tlak, priamo úmerné rýchlosti otáčania hriadeľa (s výstupom 0-10 V). Podľa jeho údajov, nastaviteľný pohon škrtí elektrickej energie, dodávaný do motora tak, aby sa rýchlosť otáčania zhodovala s rýchlosťou určenou riadiacim signálom. So zabudovanou spätnoväzbovou slučkou na riadenie rýchlosti sa pohon s premenlivými otáčkami stáva „podriadeným regulátorom“ v riadiacom systéme. Pohon môže prijímať výstup referenčnej rýchlosti z
Vladimir Rentyuk, Záporožie, Ukrajina
Článok dáva krátka recenzia a analýza populárnych obvodov určených na riadenie jednosmerných motorov s kefou a ponúka aj originálne a málo známe obvodové riešenia
Elektromotory sú pravdepodobne jedným z najobľúbenejších elektrotechnických produktov. Ako nám hovorí vševediaca Wikipedia, Elektrický motor - elektrické auto(elektromechanický menič), v ktorom Elektrická energia premení na mechanické. Za začiatok jeho histórie možno považovať objav, ktorý urobil Michael Faraday v roku 1821 a ktorý stanovil možnosť otáčania vodiča v magnetickom poli. No prvý viac-menej praktický elektromotor s rotujúcim rotorom čakal na svoj vynález až do roku 1834. Počas pôsobenia v Königsbergu ho vynašiel Moritz Hermann von Jacobi, u nás známy ako Boris Semenovich. Elektromotory sa vyznačujú dvoma hlavnými parametrami - rýchlosťou otáčania hriadeľa (rotora) a krútiacim momentom vyvinutým na hriadeli. IN všeobecne oba tieto parametre závisia od napätia dodávaného do motora a prúdu v jeho vinutí. V súčasnosti existuje pomerne veľa druhov elektromotorov, a keďže, ako poznamenala naša slávna literárna postava Kozma Prutkov, nie je možné pochopiť ich nesmiernosť, zastavíme sa pri úvahách o vlastnostiach riadenia jednosmerných motorov (ďalej len ako elektromotory).
Existujú dva typy jednosmerných motorov – kefované motory, na ktoré sme zvyknutí, a bezkomutátorové (krokové) motory. V prvom je striedavé magnetické pole, ktoré zabezpečuje otáčanie hriadeľa motora, tvorené vinutiami rotora, ktoré sú napájané cez kefový komutátor - komutátor. Interaguje s konštantou magnetické pole stator, rotujúci rotor. Na prevádzku takýchto motorov nie sú potrebné externé komutátory, ich úlohu zohráva zberač. Stator môže byť vyrobený z oboch systémov permanentné magnety a z elektromagnetov. V druhom type elektromotora tvoria vinutia stacionárnu časť motora (stator) a rotor je vyrobený z permanentných magnetov. Tu vzniká striedavé magnetické pole spínaním statorových vinutí, ktoré je vykonávané vonkajším riadiacim obvodom. Krokové motory Anglický pravopis) sú oveľa drahšie ako zberateľské. To stačí komplexné zariadenia s ich špecifické vlastnosti. ich Celý popis vyžaduje samostatnú publikáciu a presahuje rámec tohto článku. Kompletnejšie informácie o motoroch tohto typu a ich riadiacich obvodoch nájdete napr.
Kartáčované motory (obrázok 1) sú lacnejšie a vo všeobecnosti nevyžadujú komplexné systémy zvládanie. Na ich prevádzku stačí dodať napájacie napätie (usmernené, konštantné!). Problémy sa začínajú objavovať, keď je potrebné upraviť rýchlosť otáčania hriadeľa takéhoto motora alebo použiť špeciálny režim riadenia krútiaceho momentu. Existujú tri hlavné nevýhody takýchto motorov: nízky krútiaci moment nízke rýchlosti rotácia (preto je často potrebná prevodovka, čo ovplyvňuje cenu konštrukcie ako celku), generovanie vysoký stupeň elektromagnetické a rádiové rušenie (v dôsledku posuvného kontaktu v kolektore) a nízka spoľahlivosť (presnejšie krátky zdroj; dôvod je v tom istom kolektore). Pri použití komutátorových motorov je potrebné vziať do úvahy, že odber prúdu a rýchlosť otáčania ich rotora závisí od zaťaženia hriadeľa. Kartáčované motory sú všestrannejšie a širšie používané, najmä v lacných aplikáciách, kde je cena určujúcim faktorom.
Od otáčok rotora komutátorový motor závisí predovšetkým od napätia dodávaného do motora, je prirodzené použiť na jeho riadenie obvody, ktoré majú schopnosť nastavovať alebo upravovať výstupné napätie. Takéto riešenia, ktoré možno nájsť na internete, sú obvody založené na nastaviteľných stabilizátoroch napätia a keďže doba diskrétnych stabilizátorov už dávno pominula, je vhodné použiť napríklad lacné integrované kompenzačné stabilizátory. Možné možnosti Takáto schéma je znázornená na obrázku 2.
Schéma je primitívna, ale zdá sa byť veľmi úspešná a hlavne lacná. Pozrime sa na to z pohľadu inžiniera. Po prvé, je možné obmedziť krútiaci moment alebo prúd motora? Dá sa to vyriešiť inštaláciou dodatočného odporu. Na obrázku 2 je označený ako R LIM. Jeho výpočet je zahrnutý v špecifikácii, ale zhoršuje charakteristiku obvodu ako stabilizátora napätia (viac o tom nižšie). Po druhé, ktorá možnosť regulácie rýchlosti je lepšia? Možnosť na obrázku 2a poskytuje pohodlnú lineárnu riadiacu charakteristiku, a preto je obľúbenejšia. Možnosť na obrázku 2b má nelineárnu charakteristiku. Ale v prvom prípade, ak je kontakt v premennom odpore prerušený, dostaneme maximálna rýchlosť, a v druhej - minimálne. Čo si vybrať, závisí od konkrétnej aplikácie. Teraz sa pozrime na jeden príklad motora s typickými parametrami: prevádzkové napätie 12 V; maximálny prevádzkový prúd je 1 A. IC LM317 v závislosti od prípon má maximálny výstupný prúd od 0,5 A do 1,5 A (pozri špecifikáciu; existujú podobné IO s vyšším prúdom) a vyvinutú ochranu (proti preťaženiu a prehriatiu). Z tohto hľadiska je pre našu úlohu ideálny. Problémy sa skrývajú, ako vždy, v maličkostiach. Ak je motor uvedený na maximálny výkon, čo je pre našu aplikáciu veľmi reálne, potom IO aj pri minimálnom prípustnom rozdiele medzi vstupným napätím V IN a výstupným V OUT rovným 3 V rozptýli výkon min.
P = (V IN - V OUT) × I = 3 × 1 = 3 W.
Preto je potrebný radiátor. Opäť otázka znie: aký je stratový výkon? Pri 3 W? Ale nie. Ak si urobíte čas na výpočet grafu zaťaženia integrovaného obvodu v závislosti od výstupného napätia (to sa dá ľahko urobiť v Exceli), dostaneme to za našich podmienok maximálny výkon na IC sa rozptýli nie pri maximálnom výstupnom napätí regulátora, ale pri výstupnom napätí 7,5 V (pozri obrázok 3) a bude to takmer 5,0 W!
Ako vidíte, výsledkom je niečo, čo už nie je lacné, ale veľmi objemné. Takže tento prístup je vhodný len pre motory s nízkym výkonom s prevádzkovým prúdom nie väčším ako 0,25 A. V tomto prípade bude výkon na riadiacom IC na úrovni 1,2 W, čo už bude prijateľné.
Východiskom je použitie metódy pulznej šírkovej modulácie (PWM) na riadenie. Je to skutočne najbežnejšie. Jeho podstatou je dodávanie unipolárnych pravouhlých impulzov modulovaných v trvaní do motora. Podľa teórie signálu má štruktúra takejto sekvencie konštantnú zložku úmernú pomeru τ/T, kde: τ je trvanie impulzu a T je perióda sekvencie. Práve ona riadi otáčky motora, čo ju odlišuje ako integrátora v tomto systéme. Pretože výstupný stupeň regulátora PWM pracuje v kľúčový režim na odvod tepla spravidla nepotrebuje veľké radiátory aj pri relatívne veľkých výkonoch motorov a účinnosť takéhoto regulátora je neporovnateľne vyššia ako u predchádzajúceho. V niektorých prípadoch je možné použiť step-down alebo step-up DC/DC meniče, ktoré však majú množstvo obmedzení, napríklad z hľadiska hĺbky regulácie výstupného napätia a minimálneho zaťaženia. Preto sú spravidla bežnejšie iné riešenia. „Klasický“ návrh obvodu takéhoto regulátora je znázornený na obrázku 4. Používa sa ako škrtiaca klapka (regulátor) v profesionálny modelželeznice.
Na prvom operačnom zosilňovači je namontovaný generátor a na druhom komparátor. Signál z kondenzátora C1 sa privádza na vstup komparátora a nastavením prahu odozvy sa generuje signál obdĺžnikový tvar s požadovaným pomerom τ/T (obrázok 5).
Rozsah nastavenia sa nastavuje orezávacími odpormi RV1 (rýchlejší) a RV3 (pomalší) a samotné nastavenie rýchlosti sa vykonáva odporom RV2 (rýchlosť). Chcel by som upriamiť pozornosť čitateľov na skutočnosť, že podobný obvod s chybami v hodnotách deliča, ktorý nastavuje prah komparátora, koluje na internete na fórach v ruskom jazyku. Motor je priamo riadený spínačom pomocou výkonného tranzistora s efektom poľa. Vlastnosti tohto tranzistora typu MOSFET sú vysoký prevádzkový prúd (30 A konštantný a až 120 A impulzný), ultra nízky odpor otvoreného kanála (40 mOhm) a teda minimálne straty výkonu v otvorenom stave.
Čomu by ste mali venovať pozornosť ako prvé pri používaní takýchto schém? Prvým je vykonanie riadiaceho obvodu. V diagrame je malá chyba (obrázok 4). Ak sa časom vyskytnú problémy s pohyblivým kontaktom premenného odporu, dosiahneme úplné, takmer okamžité zrýchlenie motora. Môže to poškodiť naše zariadenie. Čo je protijed? Nainštalujte dodatočný odpor s dostatočne vysokým odporom, napríklad 300 kOhm, od kolíka 5 integrovaného obvodu k spoločný drôt. V tomto prípade, ak regulátor zlyhá, motor sa zastaví.
Ďalším problémom takýchto regulátorov je koncový stupeň alebo budič motora. V takýchto obvodoch môže byť vyrobený s použitím tranzistorov s efektom poľa aj bipolárnych; tie druhé sú neporovnateľne lacnejšie. Ale v prvej aj druhej možnosti je potrebné vziať do úvahy niektoré dôležité body. Na šoférovanie tranzistor s efektom poľa Typ MOSFET vyžaduje nabíjanie a vybíjanie vstupnej kapacity, ktorá môže dosahovať tisíce pikofaradov. Ak nepoužijete odpor v sérii s bránou (R6 na obrázku 4) alebo jeho hodnota je príliš malá, potom relatívne vysoké frekvencie riadiaci operačný zosilňovač môže zlyhať. Ak použijete R6 veľkej hodnoty, tranzistor zostane dlhšie v aktívnej zóne svojej prenosovej charakteristiky, a preto máme zvýšené straty a zahrievanie spínača.
Ešte jedna poznámka k zapojeniu na obrázku 4. Použitie prídavnej diódy D2 nemá zmysel, keďže štruktúra tranzistora BUZ11 má už vlastnú vnútornú vysokorýchlostnú ochrannú diódu s najlepšie vlastnosti než navrhovaný. Dióda D1 je tiež jednoznačne nadbytočná, tranzistor BUZ11 umožňuje napätie hradla ± 20 V a prepólovanie v riadiacom obvode pri unipolárnom napájaní, ako aj napätiach nad 12 V je nemožné.
Ak použijete bipolárny tranzistor, vzniká problém s generovaním dostatočného základného prúdu. Ako je známe, na nasýtenie kľúča pri bipolárny tranzistor jeho základný prúd musí byť aspoň 0,06 záťažového prúdu. Je jasné, že operačný zosilňovač nemusí poskytnúť taký prúd. Na tento účel sa v podstate v podobnom regulátore, aký sa používa napríklad v obľúbenom miniryteči PT-5201 spoločnosti, používa tranzistor, ktorým je Darlingtonov obvod. Je tu zaujímavý bod. Tieto minirytce niekedy zlyhajú, ale nie pre prehriatie tranzistora, ako by sa dalo predpokladať, ale pre prehriatie IO (max. pracovná teplota+70 °C) výstupný tranzistor (max prípustná teplota+150 °C). Vo výrobkoch, ktoré použil autor článku, bol pritlačený tesne k telu IC a nalepený na lepidlo, ktoré neprijateľne zahrievalo IC a takmer zablokovalo chladič. Ak narazíte na takýto dizajn, potom je lepšie „odlepiť“ tranzistor od IC a ohnúť ho čo najviac. Za toto know-how bol autor článku ocenený Pro’sKit sadou nástrojov. Ako vidíte, všetko je potrebné riešiť komplexne – pozrieť sa nielen na obvody, ale venovať veľkú pozornosť aj dizajnu regulátora ako celku.
Je ich ešte niekoľko zaujímavé schémy jednoduchšie PWM regulátory. Napríklad dva samostatné obvody operačného zosilňovača s ovládačom sú publikované v [