Elektrická auta stejnosměrný proud.
Konstrukce elektrických strojů
Stejnosměrný proud. Reverzibilita strojů
Podle účelu se stejnosměrné elektrické stroje dělí na generátory a motory.
Generátory vyrábějí elektrickou energii, která jde do sítě; motory vytvářejí na hřídeli mechanický točivý moment, který se používá k pohonu různých mechanismů a Vozidlo.
Delgas volá, díky čemuž je nepostradatelný pro konstrukci motorů v dopravním průmyslu. Komutátor má stejný počet cívek jako indukované vinutí stroje. mosaz nebo mosaz. Existuje však. izolovány od sebe vrstvou laku nebo oxidu. Magnetická hlava vyrobená z plech má na svém vnějším povrchu štěrbinu, kde je umístěno indukované vinutí stroje. na bázi železných plechů.
Vodiče a drážky obvykle probíhají rovnoběžně s osou, ale v jiných případech jsou nakloněny. Obvod drážek pro uložení vodičů vinutí kotvy. Elektrické trakční motory mají dva provozní režimy: nepřetržitý a hodinový. Všechno existuje větší číslo průmyslové procesy které vyžadují přesné ovládání nebo rozsah rychlostí, kterých nelze dosáhnout pomocí motorů střídavý proud. role papíru. Používají se obtokové motory. přeprava po vodě. V minulé roky stále více se používá u strojů s proměnnou rychlostí, kde je vyžadována velká rychlost a kontrola.
Elektrické stroje jsou reverzibilní. To znamená, že stejný stroj může fungovat jako generátor i jako motor. Proto můžeme mluvit o konstrukci stejnosměrných strojů, aniž bychom samostatně zvažovali konstrukci generátoru nebo motoru.
Vlastnost reverzibility by neměla být v rozporu se specifickým účelem stroje, který je obvykle navržen a používán buď jako motor nebo jako generátor. Mnohem méně často se používají stroje navržené pro provoz v režimu generátoru i motoru. Jedná se o tzv. startovací generátory, které se instalují na některé pohyblivé předměty.
V každém z nich se úsek více sníží a zvýší rychlost. Tento typ generátoru letecký generátor našel to později praktické využití v letectví. V roce začala plošná elektrifikace letadel a asynchronní motor s klecový rotor. Rotační asynchronní motor rotor.
S tímto motorem měl roztáčet vrtule letadla. Jako výsledek výzkumu bylo vyvinuto schéma automatická regulace napětí generátoru. V tomto posledním případě. Tento. Velká část této energie se používá ve stejné formě střídavého proudu v průmyslu pro osvětlení a domácí potřeby. Existují tři typy dynam v závislosti na tom, jak jsou induktor a kotva zapojeny: v sérii. Generátory kontinuálního proudu Moderní elektrárny vyrábějí téměř pouze třífázový střídavý proud.
Generátor a motor se liší konstrukcí a Designové vlastnosti. Proto použití motoru jako generátoru nebo generátoru jako motoru má za následek zhoršení kvality výkonnostní charakteristiky strojů, zejména ke snížení účinnosti.
V každém stejnosměrném stroji jsou pohyblivé a stacionární části jasně rozlišeny. Pohyblivá (rotující) část stroje se nazývárotor , nehybný -stator .
V některých případech generátor. elektromagnet je vybuzen nezávislý proud nebo sebestimulace. Pokud má brnění jeden kabel. V druhém případě se používají prostředky pro okruh motoru. Moderní generátorová pole jsou vybavena čtyřmi nebo více elektromagnetickými póly, které zvyšují velikost a sílu magnetické pole. Napětí. Stejnosměrné stroje mají princip reverzibility. rychlost otáčení. Vícesegmentový spínač používaný s bubnovou kotvou vždy připojuje externí obvod ke kabelu, který se pohybuje přes oblast pole s vysokou intenzitou.
Část stroje, ve které se indukuje elektromotorická síla, se obvykle nazývá kotva a část stroje, ve které se vytváří magnetické budicí pole, je induktor. Typicky u stejnosměrného stroje slouží stator jako induktor a rotor jako kotva.
Stator stejnosměrného stroje se také nazývápostel.Rám je vyroben z magneticky vodivého materiálu (obvykle litá ocel); plní dvě funkce, zaprvé je to magnetický obvod, kterým prochází magnetický budicí tok stroje, a zadruhé hlavní konstrukční část, ve které jsou umístěny všechny ostatní části. Tyče jsou připevněny k rámu zevnitř. Pól stroje se skládá z jádra, pólového nástavce a cívky. Při průchodu stejnosměrného proudu cívkami se v pólech indukuje magnetický budicí tok. Kromě hlavních pólů se u strojů s vysokým výkonem (více než 1 kW) instalují další menší póly pro zlepšení provozu stroje. Přídavné pólové cívky jsou zapojeny do série s vinutím kotvy.
Automatické generátory budiče jsou odděleny. Generátor složeného buzení má dvě budicí vinutí. Sériový generátor se vyznačuje zatěžovacími proudy. Na druhé straně v generátoru při výstupu proudu kotvy rovnající se součtu zatěžovací proud a budící proud. charakteristika zatížení se stává prázdnou funkcí. armatury a buzení jsou stejné. v souladu se způsobem připojení budicích vinutí. Klasifikace stejnosměrných motorů Stejné jako generátory. Dělí se na dvě velké skupiny. průtok je konstantní, pokud je zdroj energie v poli pevný.
Jádro kotvy a komutátor se odvalují na stejném hřídeli. Hřídel ocelové kotvy spočívá na ložiskách uložených v bočních štítech stroje. Na druhé straně jsou boční štíty přišroubovány ke statoru.
Pro snížení vířivých proudů a souvisejících tepelných ztrát je jádro kotvy vyrobeno z tenkých plechů z elektrooceli, které jsou od sebe navzájem izolované lakem. Do těla armatury jsou vyvrtány ventilační kanály, kterými prochází chladicí vzduch. Vodiče vinutí kotvy připojené ke kolektorovým deskám jsou uloženy v drážkách jádra kotvy.Kolektor je tvořen oddělenými měděnými deskami. mikanitová těsnění. Povrch měděných plechů je speciálně upraven pro zvýšení jejich otěruvzdornosti.
Pancéřová reakce zabraňuje opuštění proudu. Polarita hlavních pólů se nemění. Rychlost servomotorů se musí úměrně zvyšovat, aby se protielektromotorická síla zvýšila, aby se rovnice vyrovnala. Na jmenovité napětí a plná polní. ale nadále se otáčí stejným směrem jako předtím a zachovává stejnou polaritu pólů. Nyní funguje jako elektromotor a vyvíjí točivý moment. Protože zatěžovací proud od plného zatížení klesá.
Minimální bezpečné zatížení je určeno maximální bezpečnou provozní rychlostí. ve velikosti koňských zlomků a malém počtu koní. Sériový tok pole se mění přímo při změně proudu kotvy. Nejsou potřeba žádné elektrické zdroje pro buzení ani odpovídající vinutí. To poskytuje rychlostní charakteristiku, která není "pevná" nebo plochá jako bočníkový motor. Rychlost nárůstu rychlosti je zpočátku malá, ale zvyšuje se s klesajícím proudem.
Elektrické připojení vinutí otočné kotvy s pevnými svorkami stroje se provádí s pÓsilou kartáčů klouzajících po komutátoru.
Kartáče se vkládají do speciálních klecí držáků kartáčů a přitlačují se ke komutátoru spirálovými nebo listovými pružinami. Držáky kartáčů jsou připevněny k traverze, kterou lze spolu s kartáči otáčet vůči statoru pod určitým úhlem v jednom nebo druhém směru.Jako základ pro výrobu štětců se používá grafit. Pro získání požadovaných vlastností (určitá elektrická vodivost, zvýšená odolnost proti otěru) se do štětce přidávají kovové prášky (měď, olovo).
Účinnost a chlazení jsou zlepšeny eliminací ztrát výkonu v budicím poli. Vliv teploty závisí na typu materiálu použitého v magnetu. proto způsobuje mírné zeslabení toku, když se proud zvyšuje. ve kterém je budicí vinutí zapojeno do série s kotvou. Nevýhodou je nedostatek kontroly nad polem a speciální charakteristika rychlostní pár. Složené motory mají sériové pole v horní části bočníkového vinutí. Spřažené motory se obvykle zapojují tímto způsobem a nazývají se tvarovým spojením.
Na Obr.5 .1. ukazuje vzhled stejnosměrného stroje řady P, vyráběného v tuzemskuprůmysl. Stroje této řady jsou určeny pro různé výkony od 0,3 do 200 kW. Motory řady P jsou určeny pro 110 nebo 220 V a generátory - 115 nebo 230 V.
Rýže.5 .1. Vzhled DC stroje
V řadě motorů. Sériové vinutí motoru. protože neexistují žádná vinutí budiče, která by nefungovala, a není zde žádná šance na překročení rychlosti v důsledku ztráty pole. Přetížení může způsobit částečnou demagnetizaci, která změní charakteristiku otáček a momentu motoru. Sériové pole je zapojeno tak, že jeho tok se přičítá k toku hlavního bočníkového pole. Kombinovaný motor má omezený rozsah odbuzení. Oproti typům vinutých polí mají několik výhod. a je přímo úměrná zatížení.
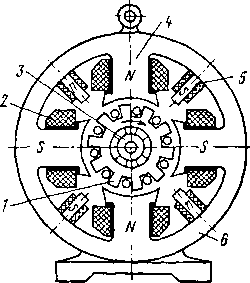
Rýže. 9.2. Průřez stejnosměrným strojem:
1 - jádro kotvy s vodiči vinutí; 2 - cívka vinutí pole;3 - hřídel; 4 - hlavní pól; 5 - přídavný pól; 6 - stator
Příčný řez stejnosměrným strojem je schematicky znázorněn na Obr.5 .2, kde je patrný stator, který vytváří tok magnetického pole, a rotor, v jehož drážkách jsou umístěny vodiče vinutí kotvy. Mezi pólovým nástavcem a kotvou je vzduchová mezera, která eliminuje tření mezi rotorem a statorem (obr.5 .3, a). Magnetická indukce ve vzduchové mezeře se mění podél kruhu podle zákona zvaného lichoběžníkový (obr.5 .3, b).
Není tak „měkký“ jako produkční motor. dokud se magnetizace úplně neobnoví. Tomu se říká „stabilita“ a motor je považován za nestabilní. Plošný spoj a mobilní cívka. jehlová rezonance. Stejnosměrný proud do kotvy je spínán tranzistory. Spínací sekvence je nakonfigurována tak, aby ve vzduchové mezeře vytvořila rotující magnetický tok. které jsou podobné spínačům. fyzická podoba Rotor obrněného motoru se skládá z válcového pláště z měděných nebo hliníkových cívek.
Konstrukce stejnosměrného stroje je na Obr.5 .4.
Stejnosměrné stroje jsou obvykle nuceně chlazeny vzduchem pomocí ventilátoru namontovaného na hřídeli kotvy. Vodíkové a vodní chladicí systémy byly vyvinuty pro výkonné stroje.


Motor může mít dva. jako setrvačnost. Servomotory jsou lehké. Servomotory zahrnují elektromotory s permanentní magnety. 05 a tranzistory dodávají proudové impulsy do vinutí kotvy. konfiguraci tohoto. rychlost a hmotnost. Výběr motoru může být stejně jednoduchý jako jeho vyladění podle dostupného prostoru. I když mají tyto motory stejné jmenovité momenty. který zůstává v pevném úhlu s magnetickým tokem generovaným permanentními magnety rotoru. Každý z těchto hlavních typů má své vlastní vlastnosti.
Rýže.5 .3. Schematické znázornění vzduchové mezery1 mezi pólovým nástavcem 2 a kotvou 3 (a) a magnetickou indukcí ve vzduchové mezeře (b)
Aby byl stroj chráněn před prachem a vlhkostí, jsou konstrukční okna umožňující přístup ke komutátoru a kartáčům kryta odnímatelnými ocelové pásky nebo talíře.
Také numericky řízené stroje nebo jiné aplikace, kde se spouštění a zastavování musí provádět rychle a přesně. S rostoucím počtem vinutí se tento obvod stává stále dražším a neefektivním. stejně jako jsou tyto prvky uspořádány v běžných stejnosměrných motorech. Má to nejlepší Startovací moment. jeho fyzikální a elektrické konstanty se výrazně liší.
Ve výjimečných případech. pokud nebudou přijata opatření ke snížení použitého napětí. u řidičů je opačný ke směru proudu a je známý jako obrácená elektromotorická síla. Jak se kotva motoru otáčí v magnetickém poli. Během tohoto spouštění poteče motorem nadměrný proud. Obvykle se používají spouštěcí zařízení, která se skládají z proměnného odporu v sérii. kolísání rychlosti generované při provozu pod zatížením a ve vakuu poskytuje základ kritéria pro stanovení jeho výkonnostních charakteristik.

Rýže.5 .4. Konstrukce stejnosměrného stroje:
1 - sběrač; 2 - kartáče; 3 - jádro kotvy; 4 - jádro hlavního pólu; 5 - pólová cívka; 6 - stator; 7 - ložiskový štít; 8 - ventilátor; 9 - vinutí kotvy
DC motor. Pokud připojíte stejnosměrný stroj k elektrické sítě, proud bude protékat vinutím kotvy. Na vodiče vinutí kotvy, umístěné v magnetickém budicím poli, působí v souladu s Ampérovým zákonem mechanické síly. Tyto síly vytvářejí točivý moment, pod jehož vlivem se kotva začne odvíjet.
Induktor má relativně malý počet závitů vlákna. Magnetický tok způsobuje vytvoření páru ve vodivých armaturách. Motory s sekvenční buzení jsou motory, ve kterých je induktor zapojen do série s kotvou. Pokud je motorové železo drženo na středním nasycení. průchodem magnetického toku skrz něj. Co. Od zadní elektromotorické síly při nulových otáčkách. Vinutí motoru je v sérii.
V řadě motorů. s přihlédnutím k předchozí rovnici. Spínací póly zlepšily přepínání reproduktorů tak, že lze použít mnohem užší vzduchovou mezeru než v minulosti. jako šunt. Reakce kotvy musí být dostatečně velká, aby rychlostní charakteristika stoupala s rostoucí zátěží. ne jako motory. Budicí systémy turbogenerátorů Obr. Základní stroj využívající reakci výztuže, ze kterého byly vyvinuty všechny ostatní, které pracují na stejném principu. používá se pro regulaci napětí ve velkých synchronních generátorech v elektrárnách. Jako transformátorové stroje. jedna rychlost obecně.
Hřídel otočné kotvy se používá k pohonu různých mechanismů: zvedacích a přepravních vozidel, obráběcích strojů, šicí stroje atd.
Na základě zákona zachování energie můžeme předpokládat, že čím větší je mechanické zatížení jeho hřídele, tím větší výkon motor odebírá ze sítě. Abychom však pochopili podstatu díla elektrický motor Je důležité sledovat, jak změny mechanické zátěže ovlivňují elektrickou energii spotřebovanou motorem.
Reakce výztuže je alarmující jev, který je nutné nějakým způsobem kompenzovat. Nad vakuovým napětím. ačkoli se napětí oblouku měnilo. Generátory určené pro svařování musí splňovat řadu vlastností, jako např.: zachovat provozní režim zkrat. připevněné ke kartáčům umístěným pod hlavními póly. k čemu se připojuje generátor? Budící vinutí je v sérii se svařovacím obvodem. Se zvýšením dostupného jmenovitého výkonu turbogenerátorů. Zkratový proud není o mnoho vyšší než nastavený svařovací proud. jehož výstup je přiváděn do pole generátoru přes kartáče a sběrací kroužky. pomocí kterého můžete měnit magnetický odpor odpovídající hlavnímu poli.
Pojďme na to přijít. Vinutí kotvy motoru se otáčí v magnetickém budícím poli. Za těchto podmínek v souladu se zákonem elektromagnetická indukce EMF se vyskytuje ve vinutí kotvy. Uplatnění pravidla pravá ruka, je snadné zjistit, že je nasměrován na aplikované síťové napětí. Proto se tomu říkalo back-EMF. Právě back-EMF je faktorem regulujícím spotřebu elektrické energie ze sítě.
Generátory používané pro svařování Svařovací generátory jsou obecně generátory příčného pole. Proud zůstává nezměněn. Zajistěte přibližně konstantní intenzitu proudu. Při pájení se páječka začne dotýkat obrobku elektrodou. a s ním i hodnota svařovacího proudu.
Rozsah nebo rozsah proudu, který svařovací generátor poskytuje, určuje svařovací procesy. Výsledný tok v magnetickém obvodu stroje je dán sdruženou magnetomotorickou silou všech vinutí ve stroji. Tento budicí stroj pracuje ve velmi tvrdé podmínky výměna za to, co si velmi zaslouží efektivní systém odvod tepla. když je vyžadován konstantní proud, i když jsou svorky zařízení zkratovány. k ose hlavního generátoru a tvoří první formu budicích systémů pro synchronní stroje. a třetí série nepokojů. nebo spíše Pro turbogenerátory střední výkon Poloha kotvy generátoru budiče je taková, že je připojena k jednomu konci rotoru stroje. umístění štětců.
Podle zákona elektromagnetické indukce je zpětné EMF přímo úměrné rychlosti změny magnetického toku procházejícího závity vinutí kotvy. V důsledku toho, jak se frekvence otáčení kotvy snižuje, snižuje se také zpětné EMF.
Pokud nedochází k mechanickému zatížení hřídele motoru (motor běží naprázdno), kroutící moment motoru je omezen pouze třecími momenty a otáčky kotvy dosahují maximální hodnoty. V tomto případě back-EMF téměř úplně kompenzuje síťové napětí a vinutím kotvy prochází minimální proud. Respektive elektrická energie, spotřebované ze sítě, je minimální.
Ovládání otáček motoru
Stejnosměrné nezávislé a paralelní buzení
Podívejme se znovu na základní rovnici elektromotoru. Výraz pro EMF motoru se neliší od výrazu pro EMF generátoru. To je pochopitelné: v obou případech se vodiče vinutí kříží elektrické vedení magnetické pole. Skutečnost, že kotva generátoru je roztáčena mechanickými silami a kotva motoru elektromagnetickými silami, není z hlediska zákona elektromagnetické indukce významná.
Z praktického hlediska je důležité pochopit podmínky a způsoby regulace otáček motoru. Odvozený vzorec nám umožňuje tento problém vyřešit. Nejprve si všimneme, že pro snížení výkonových ztrát se snaží o co nejmenší odpor vinutí kotvy (u skutečných strojů se jedná o setiny nebo tisíciny ohmu).
Existují tedy dva způsoby, jak plynule měnit otáčky motoru v širokém rozsahu: 1) změnit napětí U přiváděné do kotvy motoru; 2) změna magnetického budícího toku Ф (budící proud Iв).
Druhý způsob regulace otáček motoru je výhodnější, protože je spojen s nižšími energetickými ztrátami: budicí proud je desítkykrát menší než proud kotvy a ztráty v regulačním reostatu jsou úměrné druhé mocnině proudu. Pokud je však nutné změnit otáčky motoru ve velmi širokém rozsahu, použijí se oba způsoby současně.
Schopnost plynule a hospodárně regulovat rychlost otáčení v širokém rozsahu je nejdůležitější výhodou DC motory.
V mnoha případech je nutné změnit směr otáčení kotvy elektromotoru. Změna směru otáčení se nazývá reverzace.
Chcete-li obrátit stejnosměrný motor, je třeba změnit směr magnetického toku pole nebo proudu kotvy. Při současné změně směru toku buzení a proudu kotvy změnou polarity napětí napájecího zdroje se směr otáčení kotvy motoru nemění.
Reverzace motoru se provádí pomocí spínačů v obvodu kotvy nebo v obvodu buzení.
Výraz pro otáčky motoru ukazuje, že s klesajícím budicím magnetickým tokem se frekvence neomezeně zvyšuje. Z tohoto pohledu je nebezpečný zlom v budicím obvodu motoru, při kterém magnetický tok prudce klesá na zbytkový magnetizační tok a motor se „motá“. Režim „přeběhnutí“ je zvláště pravděpodobný u nezatíženého motoru. Režim „rozestupu“ je nouzový: odstředivé síly deformují vinutí kotvy, kotva se zaseká a v některých případech je zničena.
DC stroj (obrázek 1, A) se skládá ze dvou hlavních částí:
1) pevná část určená zejména k vytvoření magnetického toku;
2) rotační část, která se nazývá kotva a ve které dochází k procesu přeměny mechanické energie na elektrickou energii (elektrický generátor) nebo naopak - elektrická energie na mechanické (elektromotor). Stacionární a rotující část jsou od sebe odděleny mezerou.
Pevná část stejnosměrného stroje se skládá z hlavní póly 3(obrázek 2), určený k vytvoření hlavního magnetického toku; přídavné póly 4 instalované mezi hlavní a zaměstnance pro dosažení bezjiskrového provozu kartáče 6 na kolektoru (obrázek 1, b); postel 1.
Kotva 7 je válcové těleso otáčející se v prostoru mezi póly a skládá se z jádro kotvy ozubeného kola; položil na to vinutí; kolektor A kartáčový přístroj. V držáky kartáčů 5 jsou kartáče 6 zajišťující kluzný kontakt s komutátorem během otáčení. Na hřídel 2 Ventilátor a vyvažovací kroužek jsou nalisovány na motor.
Obrázek 1– Konstrukce stejnosměrného stroje A a sběratel b.
Kolektor jsou sestaveny z měděných plátů izolovaných od sebe a od pouzdra 3. Na přítlačné příruby jsou nasazeny lisované mikanitové manžety 4. Přítlačné příruby jsou od sebe izolovány mikanitovými těsněními 2, která jsou utažena kroužkovou maticí 6. Vinutí kotvy sekce jsou připájeny ke kohoutům 7. Komutátor je podroben tepelnému zpracování tak, že tvoří monolitická struktura, eliminuje rázy a vibrace.
 Obrázek 2– Hlavní tyč.
Obrázek 2– Hlavní tyč.
Hlavní pól sestává z jádra (5) namontovaného na trnech, vyrobeného z plechu z elektrooceli o tloušťce 1 mm. Na straně přivrácené ke kotvě má jádro pólový nástavec 6, který slouží k usnadnění vedení magnetického toku vzduchovou mezerou. Na jádru pólu je umístěna budicí cívka 1, kterou prochází stejnosměrný proud. Cívka je navinuta na rám 2. Tyče jsou připevněny k rámu 4 pomocí speciálních šroubů 3.
Klasifikace vinutí kotvy stejnosměrných strojů
Bez ohledu na to, jaký typ kotvy (kroužek nebo buben) máme následující typy vinutí kotvy stejnosměrných strojů:
a) jednoduchá smyčka; b) jednoduchá vlna; c) komplexní smyčka;
d) komplexní vlna.
Jednoduchá vinutí tvoří vždy pouze jeden systém vodičů uzavřených na sebe, zatímco složitá vinutí mohou tvořit jeden nebo více takových systémů. V prvním případě budeme nazývat komplexní vinutí jednou zavřeno, ve druhém - vícenásobně uzavřeno.
Režim generátoru.
Předpokládejme, že kotva stroje (obrázek 3, A) se otáčí ve směru hodinových ručiček. Poté se ve vodičích vinutí kotvy indukuje EMF, jehož směr lze určit pravidlem pravé ruky a je znázorněn na obrázku 3, A. Protože se předpokládá, že tok pólů je konstantní, je toto emf indukováno pouze v důsledku rotace kotvy a je tzv. Rotační emf.
Velikost EMF indukovaného ve vodiči vinutí kotvy.
 , (1)
, (1)
Obrázek 3– Nejjednodušší práce
Stejnosměrné stroje v režimu
generátor ( A) a motor ( b)
kde je velikost magnetické indukce ve vzduchové mezeře mezi pólem a kotvou v místě vodiče; – aktivní délka vodiče mezi sloupem a kotvou v místě vodiče, tzn. délka, po které se nachází v magnetickém poli; – lineární rychlost pohybu vodiče.
V důsledku symetrie se v obou vodičích indukuje stejné EMF, které se sčítá podél obrysu zatáčky, a tudíž celkové EMF kotvy příslušného stroje
![]() . (2)
. (2)
Emf je variabilní, protože vodiče vinutí kotvy procházejí střídavě pod severním a jižním pólem, v důsledku čehož se mění směr emf ve vodičích.
Frekvence EMF ve dvoupólovém stroji se rovná rychlosti otáčení kotvy, vyjádřené v otáčkách za sekundu:
a dovnitř obecný případ když má stroj páry pólů se střídavou polaritou,
V generátoru je komutátor mechanický usměrňovač, který převádí střídavý proud vinutí kotvy na stejnosměrný proud ve vnějším obvodu.
Stejnosměrné napětí na svorkách kotvy generátoru bude menší o velikost poklesu napětí v odporu vinutí kotvy:
Vodiče vinutí kotvy s proudem jsou v magnetickém poli, a proto na ně budou působit elektromagnetické síly:
jehož směr je určen pravidlem levé ruky.
Tyto síly vytvářejí mechanický točivý moment, který se nazývá elektromagnetický točivý moment a na obrázku 3 A, je roven
![]() , (7)
, (7)
kde je průměr kotvy. Jak je vidět z obrázku 3 A, v režimu generátoru tento moment působí proti směru otáčení kotvy a brzdí.
Režim motoru.
Považováno nejjednodušší stroj může také fungovat jako motor, pokud je do vinutí kotvy přiváděn stejnosměrný proud vnější zdroj. V tomto případě budou na vodiče vinutí kotvy působit elektromagnetické síly a vznikne elektromagnetický moment. Veličiny a , stejně jako u generátoru, jsou určeny rovností (3.6) a (3.7). Při dostatečné hodnotě se bude kotva stroje otáčet a vyvíjet mechanickou sílu. Moment je hnací a působí ve směru otáčení.
Pokud si přejeme, aby se stejnou polaritou pólů, směr otáčení generátoru (obrázek 3, A) a motor (obrázek 3, b) byly stejné, pak směr působení , a proto by měl být směr proudu v motoru obrácený ve srovnání s generátorem (obrázek 3, b).
V motorickém režimu převádí komutátor stejnosměrný proud odebíraný z vnějšího obvodu na střídavý proud ve vinutí kotvy a funguje tak jako mechanický proudový střídač.
V magnetickém poli rotují i vodiče vinutí kotvy motoru, a proto se ve vinutí kotvy motoru indukuje také EMF, jehož velikost je určena rovností (3.2). Směr tohoto EMF v motoru (obrázek 3, b) je stejný jako u generátoru (obrázek 3, A). V motoru je tedy emf kotvy nasměrováno proti proudu a napětí aplikovanému na svorky kotvy. Proto se také nazývá EMF kotvy motoru proti elektromotorické síle.
Napětí přivedené na kotvu motoru je vyváženo EMF a poklesem napětí ve vinutí kotvy:
Princip reverzibility:
Z výše uvedeného vyplývá, že každý stejnosměrný stroj může pracovat jak v režimu generátoru, tak v režimu motoru. Tato vlastnost je vlastní všem typům točivých elektrických strojů a je tzv vratnost.
K přechodu stejnosměrného stroje z režimu generátoru do režimu motoru a zpět při nezměněné polaritě pólů a kartáčů a nezměněném směru otáčení je zapotřebí pouze změna směru proudu ve vinutí kotvy.
Proto lze takový přechod provést zcela jednoduše a in jisté podmínky dokonce automaticky.
Přeměna energie.
Obrázek 4 ukazuje směry působení mechanických a elektrických veličin v kotvě generátoru a stejnosměrného motoru.

Obrázek 4– Směry EMF proudu a momentů v generátoru ( A) a motor ( b) stejnosměrný proud.
Podle prvního Newtonova zákona se při aplikaci na rotující těleso hnací a brzdný moment působící na toto těleso vzájemně vyrovnávají. Proto je v generátoru za ustálených provozních podmínek elektromagnetický točivý moment
![]() , (9)
, (9)
kde je točivý moment na hřídeli generátoru vyvíjený primárním motorem, je moment třecích sil v ložiskách, na vzduchu a na komutátoru stroje, je brzdný moment způsobený ztrátami hysterezí a vířivými proudy v jádru kotvy .
Tyto ztráty výkonu vyplývají z rotace jádra kotvy ve stacionárním magnetickém poli pólů. V tomto případě vznikající elektromagnetické síly působí na kotvu brzdě a projevují se v tomto ohledu jako třecí síly.
V motoru v ustáleném stavu
![]() , (10)
, (10)
kde je brzdný moment na hřídeli motoru vyvíjený pracovním strojem (obráběcím strojem, čerpadlem apod.).
V generátoru je to hnací moment a v motoru brzdný moment a v obou případech je to opačný směr.
Síla vyvinutá elektromagnetickým momentem se nazývá elektromagnetická síla a rovná se
představuje úhlová rychlost otáčení.
Ve vinutí kotvy se pod vlivem EMF a proudu vyvíjí vnitřní elektrický výkon kotvy
Podle rovnosti (4.5) a (4.6), tzn. Vnitřní elektrický výkon kotvy se rovná elektromagnetickému výkonu vyvinutému elektromagnetickým momentem, který odráží proces přeměny mechanické energie na elektrickou energii v generátoru a zpětný proces v motoru.
Pro generátor
![]() (15)
(15)
a pro motor
![]() . (16)
. (16)
Levé části těchto výrazů představují elektrický výkon na svorkách kotvy, první členy pravých částí jsou elektromagnetický výkon kotvy a poslední členy jsou ztráty elektrického výkonu v kotvě.
Podle těchto výrazů se mechanická síla vyvinutá na hřídeli generátoru primárním motorem, snížená o mechanické a magnetické ztráty, přeměňuje na elektrickou energii ve vinutí kotvy a elektrický výkon mínus ztráty v tomto vinutí je přiváděn do vnějšího obvodu. V motoru se elektrická energie dodávaná do kotvy z vnějšího obvodu částečně spotřebuje na ztráty ve vinutí kotvy a zbytek se přemění na výkon elektromagnetického pole a ten na mechanický výkon, který je po odečtení ztrát třením a ztrát ve vinutí kotvy ocel armatury, se přenáší na pracovní stroj.
Ztráty.
Obecná ustanovení. Když elektrický stroj pracuje, část energie, kterou spotřebuje, je promarněna a rozptýlena jako teplo. Síla ztracené energie se nazývá ztráty výkonu nebo jen ztráty.
Ztráty v elektrické stroje se dělí na základní a doplňkové. Hlavní ztráty vznikají v důsledku hlavního elektromagnetického a mechanické procesy a další ztráty jsou způsobeny různými sekundárními jevy. U točivých elektrických strojů se hlavní ztráty dělí na 1) mechanické ztráty, 2) magnetické ztráty (ocelové ztráty) a 3) elektrické ztráty.
Elektrické ztráty zahrnují ztráty ve vinutí, které se také nazývají měděné ztráty, i když vinutí nejsou vždy vyrobena z mědi, ztráty v regulačních reostatech a ztráty v přechodovém odporu kartáčových kontaktů.
Mechanické ztráty sestávají z 1) ztrát v ložiskách, 2) ztrát třením kartáčů o komutátor nebo sběracích kroužků a 3) ztrát větráním, které zahrnují ztráty třením částí stroje o vzduch a další ztráty spojené s větráním stroje.
Ztráty v ložiskách závisí na typu ložisek (valivých nebo kluzných), stavu třecích ploch, typu mazání atd.
Ztráty třením kartáče lze vypočítat pomocí vzorce
![]() , (17)
, (17)
kde je koeficient tření kartáčů na komutátoru nebo sběracích kroužcích ( ![]() ); – specifický tlak (na jednotku plochy) na kartáč; – kontaktní plocha všech kartáčů; – obvodová rychlost komutátoru nebo sběracích kroužků.
); – specifický tlak (na jednotku plochy) na kartáč; – kontaktní plocha všech kartáčů; – obvodová rychlost komutátoru nebo sběracích kroužků.
Ztráty větráním závisí na konstrukci stroje a typu větrání. U samoodvětrávacích strojů s vestavěným odstředivým ventilátorem se ztráty větráním vypočítají přibližně podle vzorce:
kde je množství vzduchu protlačovaného strojem;
– obvodová rychlost ventilačních křídel po jejich vnějším průměru, .
Obecné mechanické ztráty
Jak vyplývá z výše uvedeného, u každého daného stroje závisí ztráty pouze na rychlosti otáčení a nezávisí na zatížení. U stejnosměrných strojů o výkonu 10 - 500 kW jsou ztráty cca 2 - 0,5 % jmenovitého výkonu stroje.
Magnetické ztráty zahrnují ztráty způsobené hysterezí a vířivými proudy způsobenými obrácením magnetizace aktivních ocelových jader. Pro výpočet těchto ztrát je jádro rozděleno na části, v každé z nich je magnetická indukce konstantní. Například u stejnosměrných strojů se ztráty v jádru kotvy a v zubech kotvy počítají odděleně.
Magnetické ztráty zahrnují i dodatečné ztráty, které závisí na velikosti hlavního toku stroje (toku pólů) a jsou způsobeny převodovou strukturou jader. Tyto ztráty se také nazývají dodatečné ztráty naprázdno, protože existují v buzeném stroji již při volnoběh. Tyto ztráty u stejnosměrných strojů zahrnují především povrchové ztráty v pólových nástavcích způsobené vroubkováním kotvy.
Pokud jsou v pólových nástavcích stejnosměrného stroje i drážky (pokud je kompenzační vinutí), dochází v zubech a pólech kotvy k pulzacím magnetického toku v důsledku jejich vzájemného pohybu. Toky v zubech jsou maximální, když je zub kotvy umístěn naproti zubu pólu, a minimální, když je drážka umístěna naproti zubu. Frekvence těchto pulzací je také vysoká. V tomto případě dochází k pulzačním ztrátám v zubech a plošným ztrátám také na vnějším povrchu kotvy.
![]() . (21)
. (21)
Mezi elektrické ztráty patří i ztráty v regulačních reostatech a ztráty v přechodových odporech kartáčových kontaktů. Velikost ztráty kontaktního odporu kontaktů kartáčů pro kartáče stejné polarity se vypočítá podle vzorce
kde je pokles napětí na kontakt kartáče.
Dodatečné ztráty. Do této skupiny patří ztráty způsobené různými sekundárními jevy při zatížení stroje.
U stejnosměrných strojů vzniká jedna část uvažovaných ztrát zkreslením křivky magnetického pole ve vzduchové mezeře při zatížení pod vlivem příčné reakce kotvy. V důsledku toho je magnetický tok po zubech a průřezu hřbetu kotvy rozložen nerovnoměrně: od jednoho okraje pólového nástavce se indukce v zubech a hřbetu kotvy snižuje a od druhého okraje se zvyšuje. Toto nerovnoměrné rozložení toku způsobuje zvýšení magnetických ztrát, stejně jako nerovnoměrné rozložení proudu ve vodiči způsobuje zvýšení elektrické ztráty. V důsledku tohoto nerovnoměrného rozložení toku se také zvyšují povrchové ztráty v pólových nástavcích. V přítomnosti kompenzačního vinutí uvažovaná část dodatečných ztrát prakticky chybí.
Další část dodatečných ztrát u stejnosměrných strojů je spojena s komutací. Při změně svodových toků spínaných sekcí se ve vodičích vinutí indukují vířivé proudy. Přídavný spínací proud také způsobuje dodatečné ztráty.
V praxi se dodatečné ztráty odhadují na základě experimentálních dat ve formě určitého procenta jmenovitého výkonu. Podle GOST 11828 - 66 se tyto ztráty u stejnosměrných strojů při jmenovité zátěži berou: při absenci kompenzačního vinutí rovnající se 1,0 % a v přítomnosti kompenzačního vinutí rovnající se 0,5 % výstupního výkonu generátoru. a vedený výkon motoru. Pro ostatní zátěže jsou tyto ztráty přepočítány úměrně druhé mocnině zátěžového proudu.
Pokrývá všechny typy dodatečných ztrát, které přímo nesouvisejí s elektrickými procesy v obvodech vinutí stroje mechanická síla na hřídeli stroje.
Celkové nebo celkové ztráty představují součet všech ztrát.