Ministerstvo školství a vědy Ruské federace
Federální státní rozpočtová vzdělávací instituce
vyšší odborné vzdělání
"South Ural State University"
Fakulta automobilová a traktorová
Katedra "Provozu automobilové dopravy"
Asynchronní motor ABSTRAKT z oboru „Obecná elektrotechnika a elektronika“
Kontroloval________ /Krymsky V.V./_______________20______________________/Ivanov V.D./___________________________________________________________________________________________________________________________________________________ je_ ____/ /________________20____.
Úvod. 4
Asynchronní elektromotory. 5
Rotor ve veverčí kleci. Rotor asynchronního stroje typu veverka 6
Zkratované vinutí rotoru, často nazývané „klec nakrátko“ kvůli vnější podobnosti konstrukce, se skládá z měděných nebo hliníkových tyčí, které jsou na koncích zkratovány dvěma kroužky. Tyče tohoto vinutí jsou vloženy do drážek jádra rotoru. V malých a střední výkon Rotor se obvykle vyrábí litím roztavené hliníkové slitiny do štěrbin v jádru rotoru. Spolu s tyčemi klece nakrátko jsou odlity zkratovací kroužky a koncové lopatky, které provádějí vlastní odvětrání rotoru a odvětrání stroje jako celku. U vysoce výkonných strojů je „klec na veverku“ vyrobena z měděných tyčí, jejichž konce jsou svařeny do zkratovacích kroužků. 6
Způsoby řízení asynchronního motoru. 6
Princip činnosti asynchronní elektromotory. 9
Prokluzový rotor. 10
Fázový rotor má třífázový (in obecný případ- vícefázové) vinutí, obvykle zapojeno do hvězdy a vyvedeno na sběrací kroužky, které se otáčejí s hřídelí stroje. Pomocí kov-grafitových kartáčů klouzajícího po těchto kroužcích do obvodu vinutí rotoru: 10
Spouštění asynchronního motoru s vinutým rotorem. jedenáct
Způsoby řízení asynchronního motoru. 12
Regulace reostatu. 12
Základní poruchy asynchronního motoru s vinutým rotorem 14
Závěr 15
Reference 16
Úvod.
Třífázový asynchronní elektromotor se od jednofázového asynchronního motoru liší tím, že jednofázové vinutí je umístěno na jednofázovém motoru, přesněji na jeho statoru, a nazývá se hlavní vinutí nebo pracovní vinutí.
Rotor jednofázového motoru je konstrukčně stejný jako u třífázového asynchronního motoru. Široce používané jsou jednofázové asynchronní elektromotory vysoký výkon- do 2 kW. Jednofázové asynchronní elektromotory s výkonem do 500 W se používají v elektrických zařízeních domácností. U elektrických jednofázových asynchronních motorů neexistuje žádný počáteční (rozběhový) moment. Čím to je, že když je hlavní vinutí motoru připojeno k síti s jednou fází, jeho rotor se nemůže otáčet.
Pro zajištění startu jednofázového motoru je na stator instalováno další vinutí - spouštěcí vinutí. Je umístěn pod úhlem 90° vzhledem k hlavnímu vinutí a je zapojen do série s kondenzátorem nebo induktorem. Když jsou startovací a hlavní vinutí připojeny k síti, magnetické toky, které vytvářejí, vytvářejí rotující magnetické pole. Díky tomu se objevuje v rotoru indukovaný proud. V důsledku interakce rotujícího magnetického pole vytvořeného proudy ve vinutí statoru a magnetické pole, vytvořený indukčním proudem v rotoru, se rotor začne otáčet.
Zatímco se rotor otáčí, vytváří se prokluz, takže startovací vinutí v tomto případě prostě není potřeba a je vypnuto inerciálním (odstředivým) spínačem nebo speciálním relé. Třífázový asynchronní motor lze použít i jako jednofázový motor. Nevýhodou této metody je však nutnost použití drahých velkých kondenzátorů, protože na každých 100 W výkonu je zapotřebí kondenzátor s kapacitou přibližně 10 μF.
Asynchronní elektromotory.
V současné době tvoří asynchronní motory nejméně 80 % všech elektromotorů vyráběných v průmyslu. Patří sem také třífázové asynchronní motory.
Třífázové asynchronní elektromotory jsou široce používány v automatizačních a telemechanických zařízeních, domácích a lékařských zařízeních, zařízeních pro záznam zvuku atd.
Asynchronní stroj je střídavý elektrický stroj, jehož rychlost rotoru není rovna (v režimu motoru menší) frekvenci otáčení magnetického pole vytvářeného proudem vinutí statoru.
V řadě zemí jsou komutátorové stroje také klasifikovány jako asynchronní stroje. V Rusku se strojům, které jsou indukční, začalo říkat asynchronní stroje.
Asynchronní stroje dnes tvoří většinu elektrických strojů. Používají se především jako elektromotory a jsou hlavními měniči elektrické energie na mechanickou energii.
Výhody asynchronních elektromotorů:
Široká distribuce třífázových asynchronních motorů je vysvětlena jednoduchostí jejich konstrukce, provozní spolehlivostí, dobrými výkonnostními vlastnostmi, nízkou cenou a snadnou údržbou.
nedostatky:
1. Malý rozběhový moment.
2. Významné startovací proud.
Asynchronní stroj má stator a rotor oddělené vzduchovou mezerou. Jeho aktivními částmi jsou vinutí a magnetický obvod; všechny ostatní části jsou konstrukční, poskytují potřebnou pevnost, tuhost, chlazení, rotaci atd.
Statorové vinutí je třífázové (obecně vícefázové) vinutí, jehož vodiče jsou rovnoměrně rozmístěny po obvodu statoru a uloženy ve fázích ve štěrbinách s úhlovou vzdáleností 120 el. kroupy Fáze statorového vinutí jsou zapojeny podle standardní schémata"trojúhelník" nebo "hvězda" a připojte se k síti třífázového proudu. Magnetický obvod statoru je remagnetizován v procesu změny (rotace) magnetického toku budícího vinutí, takže je vyroben z laminované (složené z plechů) z elektrooceli pro zajištění minimálních magnetických ztrát.
Na základě konstrukce rotoru se asynchronní stroje dělí na dva hlavní typy: s zkratovaný rotor a s fáze rotor. Oba typy mají stejnou konstrukci statoru a liší se pouze konstrukcí vinutí rotoru. Magnetický obvod rotoru je vyroben podobně jako magnetický obvod statoru - vyroben z elektrooceli a laminován.
Rotor ve veverčí kleci. Rotor asynchronního stroje typu klece nakrátko.
Zkratované vinutí rotoru, často nazývané „klec nakrátko“ kvůli vnější podobnosti konstrukce, se skládá z měděných nebo hliníkových tyčí, které jsou na koncích zkratovány dvěma kroužky. Tyče tohoto vinutí jsou vloženy do drážek jádra rotoru. U strojů s malým a středním výkonem se rotor obvykle vyrábí litím roztavené hliníkové slitiny do štěrbin jádra rotoru. Spolu s tyčemi klece nakrátko jsou odlity zkratovací kroužky a koncové lopatky, které provádějí vlastní odvětrání rotoru a odvětrání stroje jako celku. U vysoce výkonných strojů je „klec na veverku“ vyrobena z měděných tyčí, jejichž konce jsou svařeny do zkratovacích kroužků.
Často jsou štěrbiny rotoru nebo statoru vyrobeny zkosené, aby se snížilo vyšší harmonické EMF způsobené pulzacemi magnetického toku v důsledku přítomnosti zubů, jejichž magnetický odpor je výrazně nižší než magnetický odpor vinutí, a také pro snížení hluk způsobený magnetickými důvody. Pro zlepšení startovacích charakteristik asynchronního elektromotoru s rotorem nakrátko, konkrétně zvýšení startovacího momentu a snížení startovacího proudu, je na rotoru použit speciální tvar drážky. V tomto případě má část drážky rotoru vně osy otáčení menší průřez než ta vnitřní. To umožňuje využít efekt proudového posunu, díky kterému se při velkých skluzech (při rozběhu) zvyšuje aktivní odpor vinutí rotoru.
Asynchronní motory s klecový rotor mají malý rozběhový moment a významný rozběhový proud, což je významnou nevýhodou „klece na veverku“. Proto se používají v těch elektrických pohonech, kde nejsou vyžadovány velké rozběhové momenty. Mezi výhody patří snadná výroba a absence mechanického kontaktu se statickou částí stroje, což zaručuje odolnost a snižuje náklady na údržbu. Při speciální konstrukci rotoru, kdy magnetický obvod „rotoru“ zůstává nehybný a v magnetické mezeře se otáčí pouze dutý hliníkový válec (klece nakrátko nebo vinutí rotoru nakrátko), lze dosáhnout nízké setrvačnosti motoru.
Konstrukce asynchronních elektromotorů s vinutým rotorem.
Hlavní části každého asynchronního motoru jsou stacionární část - stator a rotační část, nazývaná rotor.
Stator třífázového asynchronního motoru se skládá z vrstveného magnetického jádra zalisovaného do litého rámu. Na vnitřním povrchu magnetického jádra jsou drážky pro uložení vodičů vinutí. Tyto vodiče jsou stranami víceotáčkových měkkých cívek, které tvoří tři fáze vinutí statoru. Geometrické osy cívek jsou posunuty v prostoru vůči sobě navzájem o 120 stupňů.
Fáze vinutí mohou být zapojeny do hvězdy nebo trojúhelníku v závislosti na síťovém napětí. Pokud je například v datovém listu motoru uvedena napětí 220/380 V, pak při síťovém napětí 380 V jsou fáze zapojeny do hvězdy. Pokud je síťové napětí 220 V, pak jsou vinutí zapojena do „trojúhelníku“. V obou případech fázové napětí motor je 220V.
Rotor třífázového asynchronního motoru je válec vyrobený z lisovaných plechů elektrooceli a uložený na hřídeli. Podle typu vinutí se rotory třífázových asynchronních motorů dělí na klecové a fázové.
Dolivo-Dobrovolsky byl první, kdo vytvořil motor s rotorem ve veverkové kleci a studoval jeho vlastnosti. Zjistil, že takové motory mají velmi vážnou nevýhodu – omezený rozběhový moment. Dolivo-Dobrovolsky pojmenoval důvod tohoto nedostatku - silně zkratovaný rotor. Navrhl také konstrukci motoru s vinutým rotorem.
Na Obr. ukazuje pohled v řezu na asynchronní stroj s vinutým rotorem: 1 - rám, 2 - vinutí statoru, 3 - rotor, 4 - sběrací kroužky, 5 - kartáče.
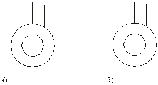
Vinutí rotoru je třífázové, podobně jako vinutí statoru, se stejným počtem pólových párů. Závity vinutí jsou umístěny v drážkách jádra rotoru a spojeny do hvězdy. Konce každé fáze jsou spojeny se sběracími kroužky upevněnými na hřídeli rotoru a jsou vyvedeny do vnějšího okruhu přes kartáče. Sběrné kroužky jsou vyrobeny z mosazi nebo oceli a musí být izolovány od sebe a od hřídele. Jako kartáče se používají kov-grafitové kartáče, které jsou přitlačovány ke sběracím kroužkům pomocí pružin držáku kartáčů pevně upevněných v těle stroje. Na Obr. Je uveden symbol pro asynchronní motor s rotorem nakrátko (a) a fázově vinutým (b).

U asynchronních elektromotorů vyšších výkonů a speciálních strojů s nízkým výkonem se pro zlepšení startovacích a regulačních vlastností používají fázově vinuté rotory. V těchto případech je na rotoru umístěno třífázové vinutí s geometrickými osami fázových cívek (1), posunutými v prostoru vůči sobě o 120 stupňů.
Fáze vinutí jsou spojeny hvězdou a jejich konce jsou spojeny se třemi sběracími kroužky (3), namontovanými na hřídeli (2) a elektricky izolovanými jak od hřídele, tak i od sebe navzájem. Pomocí kartáčů (4), které jsou v kluzném kontaktu s kroužky (3), je možné zařadit do obvodů fázových vinutí seřizovací reostaty (5).
Asynchronní motor s vinutým rotorem má lepší startovací a regulační vlastnosti, ale vyznačuje se větší hmotností, velikostí a cenou než asynchronní motor s rotorem nakrátko.
Princip činnosti asynchronních elektromotorů.
Princip činnosti asynchronního stroje je založen na využití točivého magnetického pole. Při připojení třífázového statorového vinutí do sítě vzniká rotující magnetické pole, jehož úhlová rychlost je určena frekvencí sítě f a počtem pólových párů vinutí p, tzn. ω1=2πf/p
Křížením vodičů vinutí statoru a rotoru toto pole indukuje EMF ve vinutích (podle zákona elektromagnetické indukce). Když je vinutí rotoru uzavřeno, jeho EMF indukuje proud v obvodu rotoru. V důsledku interakce proudu s výsledným magnetickým polem vzniká elektromagnetický moment. Pokud tento moment překročí moment odporu na hřídeli motoru, hřídel se začne otáčet a pohánět pracovní mechanismus. Typicky se úhlová rychlost rotoru ω2 nerovná úhlové rychlosti magnetického pole ω1, nazývané synchronní. Proto je název motoru asynchronní, tzn. nesynchronní.
Provoz asynchronního stroje je charakterizován skluzem s, což je relativní rozdíl úhlové rychlosti pole ω1 a rotor ω2: s= (ω1-ω2) /ω1

Hodnota a znaménko skluzu v závislosti na úhlové rychlosti rotoru vůči magnetickému poli určují pracovní režim asynchronního stroje. V ideálním klidovém režimu se tedy rotor a magnetické pole točí se stejnou frekvencí ve stejném směru, skluz s = 0, rotor je stacionární vůči točivému magnetickému poli, EMF v jeho vinutí se neindukuje, proud rotoru a elektromagnetický moment stroje jsou nulové. Při startu je rotor v prvním okamžiku v klidu: ω2=0, s=1. Obecně se skluz v režimu motoru mění od s=1 při spuštění do s=0 v ideálním klidovém režimu.
Když se rotor otáčí rychlostí ω2>ω1 ve směru otáčení magnetického pole, skluz se stává záporným. Stroj přejde do režimu generátoru a vyvine brzdný moment. Když se rotor otáčí v opačném směru, než je směr otáčení magnetického pole (s>1), asynchronní stroj přejde do protispínacího režimu a také vyvine brzdný moment. V závislosti na skluzu se tedy rozlišují režimy motoru (s=1÷0), generátoru (s=0÷-∞) a režimu protispínání (s=1÷+∞). Pro brzdění asynchronních motorů se používají režimy generátor a back-off.
Prokluzový rotor.
Fázový rotor má třífázové (obecně vícefázové) vinutí, obvykle zapojeno do hvězdy a připojené ke sběracím kroužkům, které se otáčejí s hřídelí stroje. Pomocí kov-grafitových kartáčů klouzajícího po těchto kroužcích do obvodu vinutí rotoru:
zahrnují balastní reostat, který působí jako přídavný aktivní odpor, stejný pro každou fázi. Snížením rozběhového proudu dosáhnou zvýšení rozběhového momentu na maximální hodnotu (v prvním okamžiku). Takové motory se používají k pohonu mechanismů, které pracují při velkém zatížení nebo vyžadují plynulou regulaci rychlosti.
zahrnují indukčnosti (tlumivky) v každé fázi rotoru. Odpor tlumivek závisí na frekvenci protékajícího proudu a jak známo v rotoru v prvním okamžiku rozběhu je frekvence klouzavých proudů nejvyšší. Jak se rotor otáčí, frekvence indukovaných proudů klesá a spolu s tím klesá i odpor induktoru. Indukční reaktance v obvodu vinutého rotoru umožňuje automatizovat proces spouštění motoru a v případě potřeby „nabrat“ motor, jehož otáčky poklesly v důsledku přetížení. Indukčnost udržuje rotorové proudy na konstantní úrovni.
zahrnout zdroj stejnosměrný proud, čímž se získá synchronní stroj.
zahrnout výkon z měniče, který umožňuje řídit rychlostní a kroutící moment motoru. Jedná se o speciální provozní režim (stroj se dvěma výkony). Síťové napětí je možné zapnout bez střídače, s fází opačnou, než je napájen stator.
Spouštění asynchronního motoru s vinutým rotorem.
Startovací podmínky asynchronního motoru s fázově vinutým rotorem lze výrazně zlepšit za cenu určitých komplikací při konstrukci a údržbě motoru.
Protože Protože aktivní odpor fázového vinutí rotoru je relativně malý, je pro dosažení maximálního počátečního rozběhového momentu nutné zařadit do obvodu rotoru rozběhový reostat s fázovým odporem.
Jakmile se rotor začne otáčet, skluz klesá a spolu s ním EMF a proud rotoru, v důsledku čehož se točivý moment snižuje. Aby motor dále vyvíjel točivý moment blízko maxima, musí se postupně snižovat odpor startovacího reostatu. Nakonec, když motor dosáhne jmenovitých otáček, je startovací reostat zkratován.
Pro snížení mechanických ztrát a opotřebení kroužků a kartáčů jsou motory někdy vybaveny zařízením pro zvedání kartáčů a zkratování kroužků.
Čím větší by měl být rozběhový moment, čím blíže je maximálnímu momentu, tím větší bude startovací proud. Z tohoto důvodu pouze pro zvláště obtížné startovací podmínky je reostat zvolen tak, aby se rozběhový moment rovnal maximu.
Aby se zajistilo, že se startovací reostat během doby startování nepřehřeje, měl by se jeho výkon přibližně rovnat výkonu motoru. U vysoce výkonných motorů se startovací reostaty vyrábějí s chlazením oleje.
Použití rozběhového reostatu samozřejmě výrazně zlepšuje startovací podmínky asynchronního motoru, zvyšuje rozběhový moment a snižuje rozběhový proud.
Způsoby řízení asynchronního motoru.
Pohon asynchronním motorem střídavý proud se týká změny rychlosti rotoru a/nebo jeho točivého momentu. Existují následující způsoby ovládání asynchronního motoru:
reostat - změna rychlosti otáčení IM s vinutým rotorem změnou odporu reostatu v obvodu rotoru, navíc se tím zvyšuje rozběhový moment;
frekvence - změna frekvence otáčení MV změnou frekvence proudu v napájecí síti, což má za následek změnu frekvence otáčení statorového pole. Motor se zapíná přes frekvenční měnič
přepínání vinutí z obvodu „hvězda“ do obvodu „trojúhelníka“ během procesu spouštění motoru, čímž se sníží startovací proudy ve vinutí přibližně třikrát, ale zároveň se sníží i točivý moment;
pulzní - dodáním speciálního typu napájecího napětí (například pilového);
zavedení dalších e. d. s v souladu s frekvencí skluzu nebo v opačném směru sekundární okruh.
změna počtu pólových párů, pokud je takové přepínání konstrukčně zajištěno (pouze u rotorů nakrátko);
změna amplitudy napájecího napětí, kdy se mění pouze amplituda (nebo efektivní hodnota) řídicího napětí. Pak vektory řídicího a budícího napětí zůstávají kolmé (spouštění autotransformátoru);
fázové řízení se vyznačuje tím, že změny otáček rotoru je dosaženo změnou fázového posunu mezi vektory budícího a řídicího napětí;
amplitudově-fázová metoda zahrnuje dvě popsané metody;
zapojení do silového obvodu statoru reaktoru;
indukční reaktance pro motor s vinutým rotorem.
Regulace reostatu.
U třífázových asynchronních motorů s vinutým rotorem se k regulaci otáček rotoru používá metoda reostatu. Toho je dosaženo zavedením nastavitelného třífázového reostatu do obvodu fázových vinutí rotoru, jako při startování motoru. Ale tento reostat musí být navržen pro dlouhodobé zatížení rotorový proud, a ne krátkodobý, jako spouštěcí reostat. Zvýšením aktivního odporu obvodu rotoru se změní charakteristika M BP (s) - dělá to měkčí. Pokud se při konstantním točivém momentu na hřídeli motoru zvýší aktivní odpor obvodu rotoru postupným zvyšováním odporu reostatu ( r p 1 < r p 2 < r p 3 ), pak bude mít pracovní bod jednu křivku M BP (s) k dalšímu, odpovídajícímu zvýšenému odporu obvodu rotoru, se skluz zvyšuje a v důsledku toho se snižují otáčky motoru. Tímto způsobem můžete měnit otáčky rotoru v rozsahu od jmenovité až po úplné zastavení. Nevýhodou tohoto způsobu regulace jsou poměrně velké energetické ztráty.
Základní poruchy asynchronního motoru s vinutým rotorem
|
Porucha |
Možný důvod |
|
Nevyvíjí jmenovitou rychlost otáčení a hučí |
Jednostranné přitahování rotoru v důsledku: a) opotřebení ložisek; b) nesouosost ložiskových štítů; c) ohýbání hřídele |
|
Špatně vyvíjí rychlost a hučí, proud ve všech třech fázích je různý a rovnoměrný Volnoběh překračuje nominální |
1. Vinutí jsou špatně zapojena a jedna z fází je „vzhůru nohama“ 2. Tyč vinutí rotoru je přetržená |
|
Rotor se neotáčí nebo se otáčí pomalu, motor hučí |
Fáze statorového vinutí je přerušena |
|
Celé auto vibruje |
1. Je narušeno vystředění polovin spojky nebo vyrovnání hřídelů 2. Rotor, řemenice a poloviny spojky jsou nevyvážené |
|
Vibrace zmizí po odpojení od sítě, proud ve fázích statoru se stane nerovnoměrným, jedna ze sekcí vinutí statoru se rychle zahřeje |
Zkrat ve vinutí statoru |
|
Přehřívá se při jmenovitém přetížení |
1. Zkrat ve vinutí statoru 2. Znečištění vinutí nebo ventilačních kanálů |
|
Nízký odpor |
1. Vlhkost nebo znečištění vinutí 2. Stárnutí izolace |
Závěr
Široce se používají třífázové asynchronní elektromotory s rotorem nakrátko národní ekonomika, takové motory však mají řadu nevýhod: chybí plynulá regulace otáček, vysoký startovací proud atd. To vše se ale dá obejít, pokud místo rotoru použijete vinutý rotor.
Fázový rotor je uspořádán správným způsobem: třífázové vinutí je umístěno ve štěrbinách rotoru (vinutí je podobné vinutí statoru); fáze vinutí rotoru jsou spojeny hvězdou; začátky fází jsou spojeny se třemi kontaktními kroužky vyrobenými z mosazi nebo mědi, které jsou zase namontovány na stejné hřídeli s rotorem. V souladu s tím jsou sběrací kroužky izolovány od sebe navzájem a od hřídele. Kovové grafitové nebo uhlíkové kartáče namontované na držáku kartáčů namontovaném na ložiskovém štítu jsou dobře přitlačeny ke kontaktním kroužkům.
Ke spuštění motoru s vinutým rotorem jsou kartáče připojeny k řídicím nebo spouštěcím reostatům. Tyto stejné reostaty umožňují snížit startovací proud, protože díky nim se zvyšuje celkový odpor vinutí rotoru.
Reostaty slouží k plynulé regulaci otáček motoru, jakož i ke změně dalších provozních charakteristik.
Bibliografie
1. Konstrukce elektrických strojů: Učebnice pro vysoké školy Kniha 1. Redakce Kopylov I.P. Moskva: Energoatomizdat 1993. - 464 s.
2. Elektrické stroje: Asynchronní stroje: Učebnice. Pro elektromech. specialista. Univerzity / Radin V.I., Bruskin D.E., Zorohovich A.E.; Ed. I.P. Kopylov-M.: Vyšší škola, 1988, -328 s.
Kuzněcov M.I. Základy elektrotechniky. Tutorial. Ed. 10., revidováno "graduální škola"
Asynchronní motor s rotorem nakrátko (AM S KZR)
Nazývají se zařízení, která přeměňují elektrickou energii (vstup) na energii mechanickou (výstup). elektromotory .
Mechanická energie je nezbytná pro provoz výrobních strojů a mechanismů.
krevní tlak se skládá skládá se ze statoru (pevná část) a rotoru (pohyblivá část).
Stator obsahuje: pouzdro; magnetický obvod (jádro), sestávající z tenkých ocelových plátů; tři vinutí (cívky), přesazené od sebe o 120°, které zapadají do drážek magnetického jádra.
Rotor obsahuje: hřídel, magnetický obvod, zkratované (ve formě klece nakrátko) vinutí.
Symbol
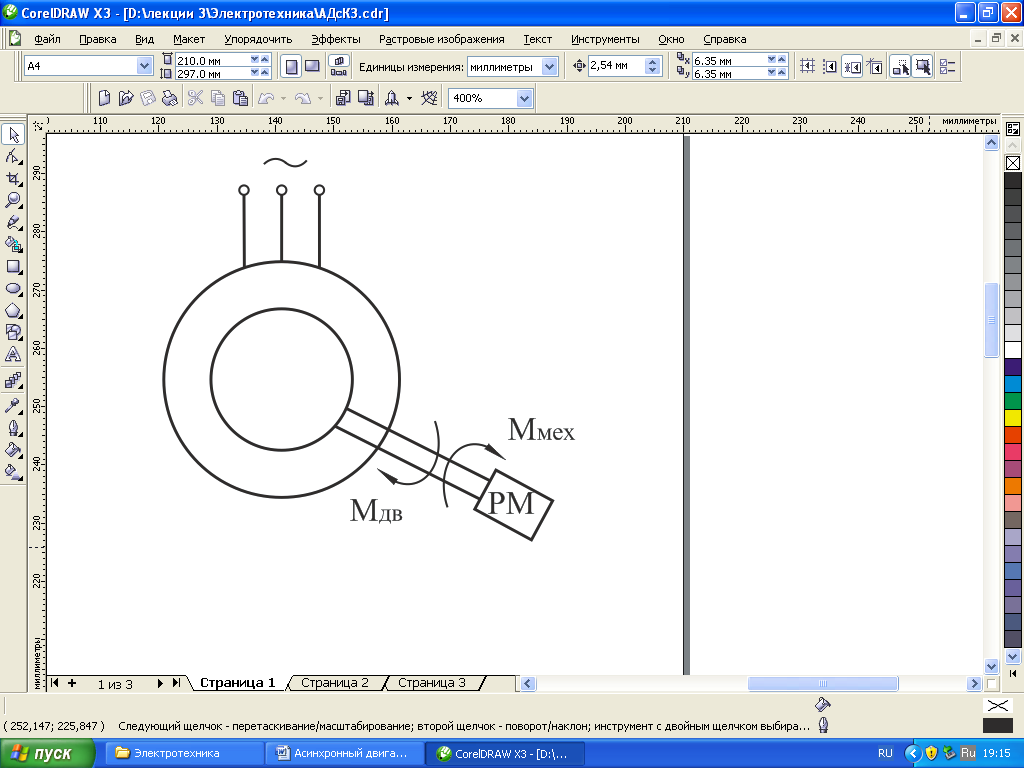
K rotoru je připojen výrobní mechanismus, který působí jako zátěž motoru.
Výhody motoru: jednoduché, levné, spolehlivé.
nedostatky:špatné startovací vlastnosti, tj. nízký startovací moment, vysoký startovací proud a také jalový odběr proudu ze sítě.
PRINCIP FUNGOVÁNÍ
U 1 → já 1 → F 1 (rotující magnetické pole)→ E 2 (E 1 ) → já 2
V důsledku interakce I 2 s Ф vzniká moment M [Nm]
M = NAjá 2 F cosψ 2,
kde ψ 2 je fázový posun mezi E 2 a I 2, pod jehož vlivem se rotor začíná otáčet.
V IM je ASYNCHRONICITA (nerovnost) rotace magnetického pole n 1 a rotoru n 2. Díky tomuto asynchronnímu pohybu dochází v rotoru k elektrickým procesům (E 2 a I 2). Velikost asynchronie se odhaduje posunutím S, v relativních jednotkách nebo procentech:
![]() ,
[%],
,
[%],
n 1 - frekvence rotace magnetického pole.
P p - počet párů magnetické póly pole: 1, 2, 3... atd.;
f je aktuální frekvence.
Pokud f nom = 50 Hz, pak = 3000, 1500, 1000 ot./min. atd., v závislosti na počtu pólových párů motoru.
Od (1) máme ![]() .
.
Provoz motoru začíná od n 2 = 0 (start), poté
(maximální skluz).
Teoreticky maximální otáčky rotoru při bez zatížení n 2 = n 1, pak
Rozsah změn S byl od 1 (minimální rychlost rotoru) do 0 (maximální rychlost rotoru).
MECHANICKÉ CHARAKTERISTIKY PEKLA - hlavní charakteristika IM, ukazující, jak se mění otáčky rotoru pod vlivem zatížení. Tuto charakteristiku lze získat provozně nebo výpočtem pomocí vzorců:
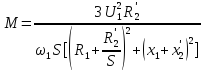 (1)
(1)
Zadáním S ve vzorcích (1) a (2) můžete najít n.
Zadáním zatížení M můžete najít skluz a následně n 2.
Tato mechanická charakteristika má tvar:
|
|
|

Ve vlastnostech můžeme vyzdvihnout 4 hlavní body a podle toho 3 parcely. Zvažte tyto body:
1 - volnoběžné otáčky (motor se točí bez zatížení).
Souřadnice tohoto bodu (n 2 = n 1, M=0);
2 - nominální režim - dochází při zatížení rovném maximální dovolené za podmínek dlouhodobého provozu.
Souřadnice tohoto bodu (n 2 = n nom, M = M nom) jsou uvedeny v pasu;
3 - kritické zatížení, při kterém motor vyvine maximální točivý moment.
Souřadnice tohoto bodu (S cr nebo n cr; M = M max = M cr).
Když je zatížení větší než kritické, motor se s ním nedokáže vyrovnat, což vede k zastavení;
4 - výchozí bod, od tohoto bodu se motor spustí.
Souřadnice tohoto bodu (n 2 = 0, M = M n)
Všechny souřadnice lze zjistit z údajů v pasu motoru.
Weby 1-3 - stabilní provoz, kdy je zatížení motoru od 0 do Mcr, motor má schopnost přizpůsobit se zatížení a zvýšit svůj točivý moment (sílu), což nevede k zastavení motoru.
3-4 - charakterizuje chod motoru v této oblasti je nestabilní;
kde:
1-2 - je možný dlouhodobý provoz, při kterém proud odebíraný ze sítě nepřekračuje maximální přípustný, tedy jmenovitý.
2-3 - přípustný je pouze krátkodobý provoz, protože při takovém zatížení I motoru > I nom a přehřátí motoru je možné.
MECHANICKÉ VLASTNOSTI n=f(M), získané za nominálních provozních podmínek, tj. při U=U nom, f=f nom a přírodní vzor se nazývá inkluze (bez dalších prvků). PŘÍRODNÍ.
REGULACE OTÁČEK BP S KZR
Jak vyplývá ze vzorce
![]()
frekvenci otáčení lze ovlivnit změnou frekvence otáčení magnetického pole
Změnou frekvence napájecího napětí f 1 (pomocí speciálních měničů) nebo změnou počtu pólových párů P p (změnou obvodu cívek statoru).
V obou případech zůstává výše skluzu prakticky nezměněna.
Rovněž lze měnit otáčky motoru ovlivněním skluzu S. To lze provést změnou napětí napájejícího motor, případně změnou odporu rotoru (pokud to konstrukce rotoru umožňuje).
MECHANICKÉ VLASTNOSTI, získaný za provozních podmínek odlišných od jmenovitých, se nazývá UMĚLÝ.
Zvažme tyto metody.
VLIV FREKVENCEFPŘI OTÁČKÁCH MOTORU
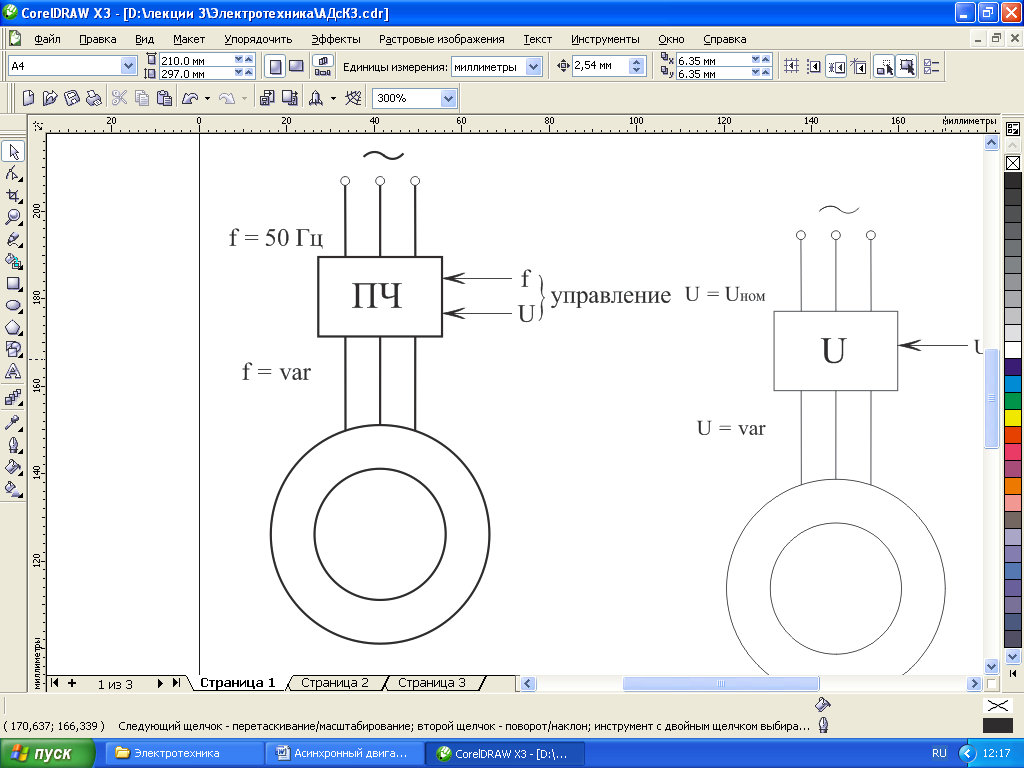
Z teorie strojů je známo, že pro zajištění efektivního chodu motoru s regulací frekvence je nutné měnit přiváděné napětí se změnou f tak, aby poměr U/f zůstal konstantní. Je zřejmé, že tuto podmínku lze splnit pouze snížením f<50 Гц, потому что уменьшение напряжения U
S nárůstem f>50 Hz by se mělo úměrně zvyšovat napětí U>U nom, to však není vzhledem k provozním podmínkám motoru přípustné. Tato okolnost se projeví ve formě mechanických vlastností.
Všimněte si, že v každém případě se při změně f změní i frekvence rotace magnetického pole (tj. poloha bodu n 1 na mechanické charakteristice). Poloha bodu n 1 tedy může být vodítkem při zobrazování umělých mechanických charakteristik.

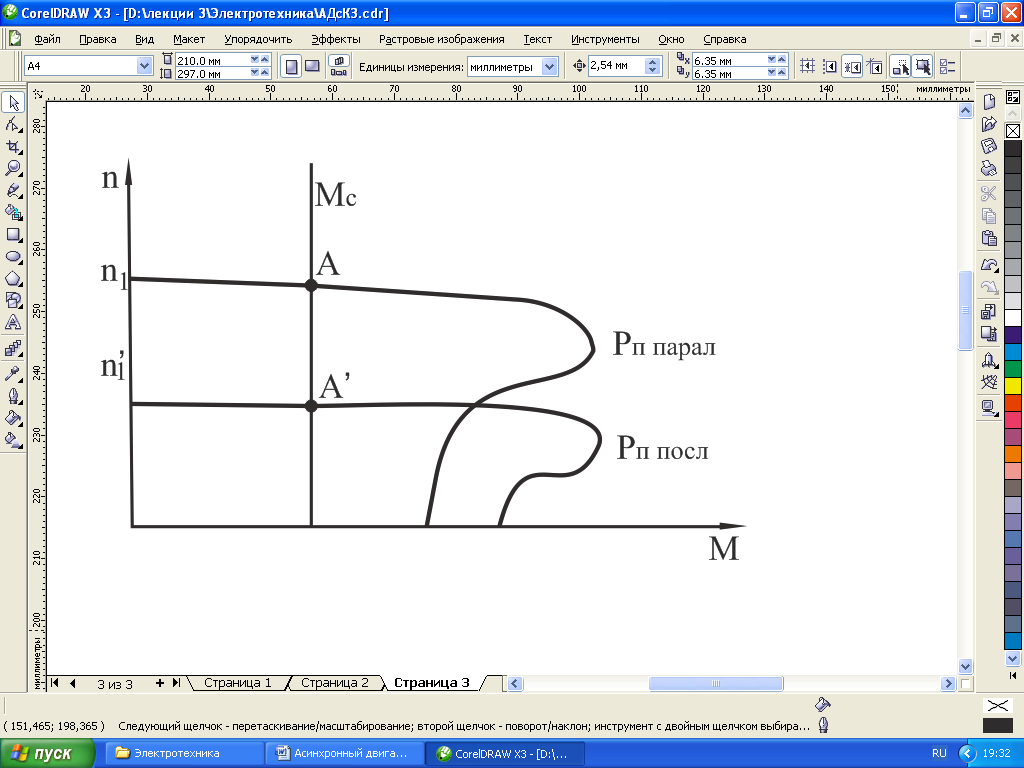
Pokud uvedeme mechanické charakteristiky mechanických charakteristik mechanismu (nechť M c =const, kde M c je moment odporu), pak můžeme odhadnout rozsah řízení otáček pro řízení frekvence, kde A, A", A" jsou pracovní body získané za podmínky M dv = M s.
Výhody frekvenční metody regulace rychlosti krevního tlaku: plynulost regulace: plynulou změnou f dostaneme velký počet umělé vlastnosti a následně i rychlosti; velký rozsah s nastavením nahoru i dolů od jmenovitého (dvouzónová regulace).
Nedostatky: nutnost instalace frekvenčního měniče, což výrazně zvyšuje náklady na elektrický pohon.
OVLÁDÁNÍ POLE poskytuje možnost změny počtu párů pólů P p Tento způsob je možný pouze u speciálních - víceotáčkových, asynchronních motorů a je dosažen spínáním jednotlivých sekcí, které tvoří cívku statoru (vinutí) ze sériového zapojení. k paralelnímu nebo naopak a počet pólových párů v sériovém zapojení je 2x větší než u paralelního zapojení, tj. P p sériové. =2P p paralelní. , a následně, ![]() .
.
Je zřejmé, že poloha bodu n 1 na mechanické charakteristice se změní dvakrát.
Výhody pólové regulace: snadná implementace, absence speciálních převodníků v napájecím obvodu motoru.
Nedostatky: stupňovitá regulace, malý rozsah regulace.
ŘÍZENÍ RYCHLOSTI ZMĚNOU NAPÁJECÍHO NAPĚTÍU
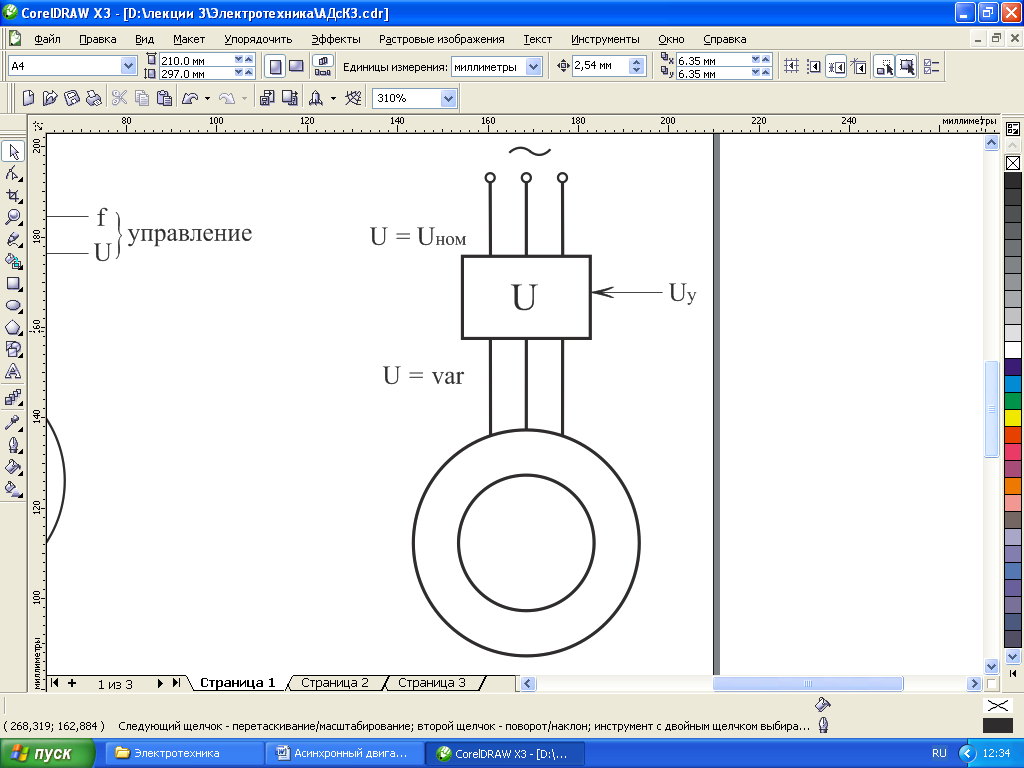
U této metody zůstává frekvence otáčení magnetického pole () konstantní a frekvence otáčení rotoru se mění v důsledku klouzání. To lze vysvětlit tím, že s poklesem napájecího napětí se M motoru velmi snižuje (kvadratická závislost), což při stejném zatížení vede ke snížení rychlosti a následně ke skluzu. Při konstrukci umělých mechanických charakteristik vycházíme ze skutečnosti, že bod n 1, odpovídající rotační frekvenci magnetického pole, se nezmění, napětí U lze měnit pouze směrem k poklesu, a tím i momenty M p a M max se sníží, protože M~ U2.
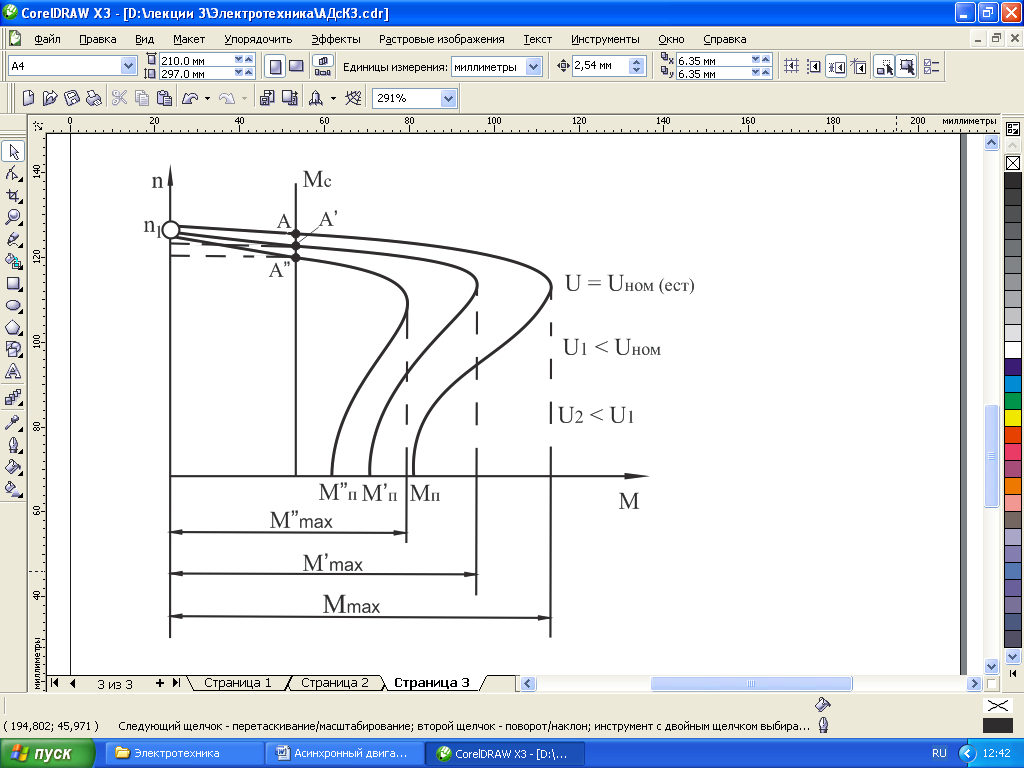
Chyba: malý rozsah regulace rychlosti (odhady rychlosti při práci v bodech A, A, A“). Proto tato metoda regulace se používá zřídka.
Přednášky na elektrické stroje
Asynchronní motor s rotorem nakrátko (obr. 249 a 250) se skládá z těchto hlavních částí: stator s třífázovým vinutím, rotor klece veverky a kostra. Vinutí rotoru je proveden bezkontaktně (není připojen k žádnému vnějšímu obvodu), což určuje vysoká spolehlivost takový motor.
Magnetický systém.Asynchronní stroj Na rozdíl od stejnosměrného stroje nemá výrazné póly. Takový magnetický systém se nazývá nevyčnívající pól. Počet pólů ve stroji je určen počtem cívek ve vinutí statoru a jejich schématem zapojení. U čtyřpólového stroje (obr. 251) se magnetický systém skládá ze čtyř stejných větví, z nichž každou prochází polovina magnetického toku Ф p jednoho pólu u dvoupólového stroje jsou dvě takové větve, v šestipólový stroj - šest atd. Protože všechny prvky magnetické soustavy prochází střídavým magnetickým tokem, pak nejen rotor 1, ale
Rýže. 249. Asynchronní motor s rotorem nakrátko: 1 - rám; 2 - stator; 3 - rotor; 4 - tyče vinutí rotoru; 5 - ložiskový štít; 6 - lopatky větracího rotoru; 7 - ventilátor; 8 - svorkovnice
 Rýže. 250. Elektrické schéma asynchronní motor s rotorem nakrátko (a) a jeho podmíněnost grafický obrázek(b): 1 - stator; 2 - rotor
Rýže. 250. Elektrické schéma asynchronní motor s rotorem nakrátko (a) a jeho podmíněnost grafický obrázek(b): 1 - stator; 2 - rotor
 Obr.251. Magnetické pole čtyřpólového asynchronního stroje
Obr.251. Magnetické pole čtyřpólového asynchronního stroje
 Rýže. 252. Plechy rotoru (a) a statoru (b)
Rýže. 252. Plechy rotoru (a) a statoru (b)
 Rýže. 253. Balení sestaveného statoru (a) a statoru s vinutím (b)
Rýže. 253. Balení sestaveného statoru (a) a statoru s vinutím (b)
a stator 2 je vyroben z plechů z elektrooceli (obr. 252), které jsou od sebe izolované vrstvou izolačního laku, okují atd. škodlivý účinek vířivé proudy vznikající v oceli statoru a rotoru při rotaci magnetického pole. Statorové a rotorové plechy mají otevřené, polouzavřené popř uzavřená forma, ve kterém jsou umístěny vodiče příslušných vinutí. Ve statoru se nejčastěji používají polouzavřené štěrbiny obdélníkového nebo oválného tvaru, u vysoce výkonných strojů - otevřené štěrbiny obdélníkového tvaru.
Jádro statoru 1 (obr. 253, a) je zalisováno do litého rámu 3 a zajištěno pojistnými šrouby. Jádro rotoru je nalisováno na hřídel rotoru, který se otáčí v kuličkových ložiskách uložených ve dvou ložiskových štítech. Vzduchová mezera mezi statorem a rotorem má minimální velikost, přijatelné z hlediska přesnosti montáže a mechanické tuhosti konstrukce. U motorů s nízkým a středním výkonem je vzduchová mezera obvykle několik desetin milimetru. Tato mezera zajišťuje snížení magnetického odporu magnetického obvodu stroje a tím i snížení magnetizačního proudu potřebného k vytvoření magnetického toku v motoru. Snížení magnetizačního proudu umožňuje zvýšit účiník motoru.
Statorové vinutí. Vyrábí se ve formě řady cívek kulatých popř obdélníkový úsek. Vodiče umístěné v drážkách jsou spojeny do řady cívek 2 (obr. 253,b). Cívky jsou rozděleny do identických skupin podle počtu fází, které jsou umístěny symetricky po obvodu statoru (obr. 254, a) nebo rotoru. V každé takové skupině jsou všechny cívky elektricky propojeny a tvoří jednu fázi vinutí, tj. elektrický obvod. Na velké hodnoty fázový proud nebo v případě potřeby spínání jednotlivých cívek mohou mít fáze několik paralelních větví. Nejjednodušším prvkem vinutí je závit (obr. 254, b), sestávající ze dvou vodičů 1 a 2, umístěných v drážkách umístěných v určité vzdálenosti od sebe -
 Rýže. 254. Umístění cívek třífázové vinutí na statoru asynchronního motoru (a) a závitu dvou vodičů (b)
Rýže. 254. Umístění cívek třífázové vinutí na statoru asynchronního motoru (a) a závitu dvou vodičů (b)
u Tato vzdálenost je přibližně rovna jednomu pólovému dílku m, což je chápáno jako délka oblouku odpovídající jednomu pólu.
Typicky jsou závity tvořené vodiči ležícími ve stejných štěrbinách kombinovány do jedné nebo dvou cívek. Někdy se jim říká sekce. Jsou položeny tak, že každá drážka pojme jednu stranu cívky nebo dvě strany - jednu nad druhou. V souladu s tím se rozlišuje jedno- a dvouvrstvé vinutí. Hlavním parametrem, který určuje rozložení vinutí mezi sloty, je počet slotů q na pól a fázi.
Ve statorovém vinutí dvoupólového motoru (viz obr. 254, a) se každá fáze (A-X; B-Y; C-Z) skládá ze tří cívek, jejichž strany jsou umístěny ve třech sousedních štěrbinách, tj. q = 3. Obvykle q > 1 , takové vinutí se nazývá distribuováno.
Nejrozšířenější jsou dvouvrstvá distribuovaná vinutí. Jejich sekce 1 (obr. 255, a) jsou umístěny ve štěrbinách 2 statoru ve dvou vrstvách. Vodiče vinutí statoru jsou v drážkách vyztuženy textolitovými klínky 5 (obr. 255, b), které jsou umístěny u hlav zubů.
Stěny drážky jsou pokryty listovým izolačním materiálem 4 (elektrokarton, lakovaná tkanina atd.). Vodiče ležící v drážkách jsou navzájem odpovídajícím způsobem spojeny z koncových stran stroje. Dráty, které je spojují, se nazývají přední části. Protože přední části se nepodílejí na vyvolání např. atd., provádějí se co nejkratší dobu.
Jednotlivé cívky statorového vinutí lze zapojit do hvězdy nebo trojúhelníku. Začátky a konce vinutí každé fáze jsou vyvedeny na šest svorek motoru.
Vinutí rotoru. Vinutí rotoru je vyrobeno ve formě veverkové klece (obr. 256, a). Je vyroben z měděných nebo hliníkových tyčí zkratovaných na koncích dvěma kroužky (obr. 256, b). Tyče tohoto vinutí jsou vloženy do štěrbin rotoru bez izolace, protože napětí ve zkratovaném vinutí rotoru je nulové.
 Rýže. 255. Dvouvrstvé statorové vinutí asynchronního motoru: 1 - sekce; 2 - drážka; 3 - vodič; 4 - izolační materiál; 5 - klín; 6 - zub
Rýže. 255. Dvouvrstvé statorové vinutí asynchronního motoru: 1 - sekce; 2 - drážka; 3 - vodič; 4 - izolační materiál; 5 - klín; 6 - zub
 Rýže. 256. Rotor na veverku: a - klec na veverku; b - rotor s veverkovou klecí tyčí; c - rotor s litou klecí nakrátko; 1 - zkratovací kroužky; 2- tyče; 3- hřídel; 4 - jádro rotoru; 5 - ventilační lopatky; 6 - lité klecové tyče
Rýže. 256. Rotor na veverku: a - klec na veverku; b - rotor s veverkovou klecí tyčí; c - rotor s litou klecí nakrátko; 1 - zkratovací kroužky; 2- tyče; 3- hřídel; 4 - jádro rotoru; 5 - ventilační lopatky; 6 - lité klecové tyče
Drážky rotoru nakrátko jsou obvykle vyrobeny jako polouzavřené au strojů s nízkým výkonem - uzavřené (drážka má ocelový okraj oddělující ji od vzduchové mezery). Tento tvar drážky umožňuje dobře zpevnit vodiče vinutí rotoru, i když mírně zvyšuje jeho indukční odpor.
U motorů s výkonem do 100 kW se tyče klece nakrátko získávají nalitím roztaveného hliníku do drážek jádra rotoru (obr. 256, c). Spolu s tyčemi klece pro veverky jsou odlity i jejich spojující koncové zkratovací kroužky.
Hliník je pro tento účel vhodný, protože má nízkou hustotu, poměrně vysokou elektrickou vodivost a snadno se taví.
Motory mají obvykle ventilátory namontované na hřídeli rotoru. Provádějí nucené větrání vyhřívané části stroje (vinutí a ocel statoru a rotoru), což umožňuje získat větší výkon z motoru. U motorů s rotorem nakrátko jsou lopatky ventilátoru často odlity společně s bočními kroužky klece nakrátko (viz obr. 256, c).
Asynchronní motory s rotorem nakrátko jsou konstrukčně jednoduché a provozně spolehlivé. Jsou široce používány pro pohon kovoobráběcích strojů a dalších zařízení, která začínají pracovat bez zatížení. Relativně nízký rozběhový moment těchto motorů a vysoký rozběhový proud však neumožňují jejich použití k pohonu takových strojů a mechanismů, které je nutné při velkém zatížení (s velkou zátěží) ihned uvést do provozu. startovací moment). Mezi takové stroje patří zdvihací zařízení, kompresory atd.
Můžete zvýšit startovací moment a snížit startovací proud provedením klece veverky se zvýšeným aktivním odporem. V tomto případě bude mít motor zvýšený prokluz a velké ztráty výkonu ve vinutí rotoru. Takové motory se nazývají motory se zvýšeným skluzem (označované jako AC). Lze je použít k pohonu strojů, které pracují relativně krátkou dobu. Jeden. p.s. Střídavé tyto motory (se skluzem do 10 %) se používají k pohonu kompresorů, které pracují periodicky na krátkou dobu, kdy tlak ve vzduchojemech klesne pod určitou mez.
Motory se zvýšeným rozběhovým momentem. Asynchronní motory s kotvou nakrátko se zvýšeným rozběhovým momentem mají speciální konstrukci rotoru (označené AP). Patří mezi ně motory s dvojitou veverkou a motory s hlubokou drážkou.
Rotor 3 (obr. 257,a) motoru s dvojitou kotvou nakrátko má dvě vinutí nakrátko. Vnější klec 1 je výchozí klec. Má vysokou aktivní a nízkou reaktanci. Vnitřní klec 2 je vinutí hlavního rotoru; naopak má nevýznamnou aktivní a vysokou reaktanci. V počátečním okamžiku rozběhu protéká proud především vnější klecí, čímž vzniká výrazný točivý moment. Jak se rychlost otáčení zvyšuje, proud prochází do vnitřní klece a na konci procesu spouštění stroj funguje jako obvykle motor veverky s jednou (vnitřní) buňkou. Posun proudu do vnějšího článku v počátečním okamžiku spuštění je vysvětlen akcí, např. d.s. samoindukce indukovaná ve vodičích rotoru. Čím níže je vodič umístěn v drážce, tím větší je magnetický svodový tok 6, který je pokryt a tím větší je e. d.s. indukuje se v něm samoindukce (obr. 257, c), proto bude mít větší indukční odpor.
Posun proudu do horních vodičů rotoru má silný vliv při stojícím rotoru, kdy je frekvence proudu indukovaného v obou článcích rotoru vysoká. Indukční odpory obou článků jsou v tomto případě mnohem větší než aktivní a proud se mezi ně rozděluje nepřímo úměrně jejich indukčním odporům, to znamená, že prochází převážně vnějším článkem s vysokým činným odporem.
S rostoucí rychlostí otáčení rotoru se frekvence proudu v něm snižuje (rotující magnetické pole bude protínat vodiče rotoru s nižší frekvencí) a proud začne procházet oběma články v souladu s jejich aktivními odpory. , tedy hlavně přes vnitřní buňku .
Proces spouštění motoru s dvojitou klecí nakrátko je tedy podobný procesu spouštění asynchronního motoru s vinutým rotorem, kdy se na začátku rozběhu do obvodu vinutí rotoru zavádí přídavný činný odpor (rozběhový reostat). a jak postupuje zrychlení, tento odpor se odstraňuje. Stejně tak v uvažovaném motoru proud na začátku rozběhu prochází vnější klecí s vysokým aktivním odporem a pak při zrychlování postupně přechází do vnitřní klece s nízkým aktivním odporem.
Rýže. 257. Konstrukce rotorů asynchronních motorů se zvýšeným rozběhovým momentem: s dvojitou klecí nakrátko (a), s hlubokými drážkami (b) a úseky jejich drážek (c a d)
Pro zvýšení aktivního odporu startovací klece jsou její tyče vyrobeny z manganové mosazi nebo bronzu. Tyče pracovní klece jsou vyrobeny z mědi, která má nízkou odpor a jejich průřezová plocha je větší než plocha odpalovací klece. V důsledku toho se aktivní odpor startovacího článku zvyšuje 4-5krát ve srovnání s pracovním. Mezi tyčemi obou článků je úzká mezera 5, jejíž rozměry určují indukčnost pracovního článku. Dvouklecový motor je o 20-30% dražší než motor s veverkou konvenční konstrukce. Pro zjednodušení technologie výroby rotoru jsou dvouklecové motory malého a středního výkonu vyráběny s litou hliníkovou klecí.
Provoz motorů s hlubokými štěrbinami (obr. 257, b) je také založen na využití jevu proudového posunu. U těchto motorů jsou tyče 4 klece nakrátko vyrobeny ve formě úzkých měděných tyčí uložených v hlubokých drážkách rotoru 3 (výška drážky je 10-12krát větší než její šířka). Spodní vrstvy tyčí, umístěné dále od povrchu rotoru, jsou výrazně pokryty velký počet Magnetických čar svodového toku je 6 než horních (obr. 257d), proto mají mnohonásobně větší indukčnost. Na začátku rozběhu v důsledku zvýšené indukční reaktance spodních částí tyčí proud prochází převážně jimi horní části. V tomto případě je využita pouze malá část průřezu každé tyče, což vede ke zvýšení jejího aktivního odporu a následně i ke zvýšení aktivního odporu celého vinutí rotoru.
Se zvyšujícími se otáčkami rotoru se zmenšuje posun proudu do horních částí tyčí (ze stejného důvodu jako u motoru s dvojitou klecí nakrátko) a po dokončení rozběhu je proud rovnoměrně rozložen po jejich kříži. sekční plocha.