Fra et stort antal typer elektriske motorer AC, brugt i moderne elektroteknik, den mest udbredte, bekvemme og økonomiske er en motor med et roterende magnetfelt, baseret på brugen af trefaset strøm.
For at forstå den grundlæggende idé, der ligger til grund for designet af disse motorer, lad os vende tilbage til eksperimentet afbildet i fig. 264. Vi så der, at en metalring placeret i et roterende magnetfelt begynder at rotere i samme retning, som feltet roterer. Årsagen til denne rotation er det faktum, at når feltet roterer, ændres den magnetiske flux gennem ringen, og samtidig induceres der strømme i ringen, hvorpå feltet virker med kræfter, der allerede er kendt for os, hvilket skaber et drejningsmoment .
I nærvær af en trefaset strøm, dvs. et system med tre strømme, der er forskudt i fase i forhold til hinanden med (en tredjedel af en periode), er det meget let at opnå et roterende magnetfelt uden mekanisk rotation af magneten og uden enhver yderligere enheder. Ris. 351,a viser, hvordan dette gøres. Her har vi tre spoler monteret på jernkerner, placeret i en vinkel på 120° i forhold til hinanden. Gennem hver af disse spoler passerer en af systemets strømme, der udgør en trefaset strøm. Magnetiske felter skabes i spolerne, hvis retninger er angivet med pile. Den magnetiske induktion af hvert af disse felter ændrer sig over tid efter den samme sinusformede lov som den tilsvarende strøm (fig. 351, b). Magnetfeltet i mellemrummet mellem spolerne er således resultatet af overlejringen af tre vekslende magnetiske felter, som på den ene side er rettet i en vinkel på 120° i forhold til hinanden, og på den anden side er forskudt i fase med . Den øjeblikkelige værdi af den resulterende magnetiske induktion er vektorsummen af de tre komponentfelter i i øjeblikket tid:
![]() .
.
Hvis vi nu begynder at lede efter, hvordan den resulterende magnetiske induktion ændrer sig over tid, så viser beregningen, at i absolut værdi ændres den magnetiske induktion af det resulterende felt ikke (bevarer en konstant værdi), men vektorens retning roterer ensartet, beskriver en fuld revolution i en aktuel periode.
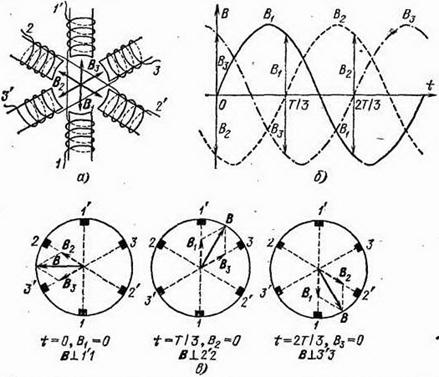
Ris. 351. At komme til at rotere magnetisk felt når der tilføjes tre sinusformede felter rettet i en vinkel på 120° i forhold til hinanden og forskudt i fase ved: a) placeringen af spolerne, der skaber et roterende felt; b) graf over ændringer i feltinduktion over tid; c) den resulterende induktion er konstant i størrelse og roterer på en cirkel over en periode
Uden at gå ind i detaljerne i beregningen vil vi forklare, hvordan tilføjelsen af tre felter giver et roterende felt, der er konstant i absolut værdi. I fig. 351, b-pile markerer værdierne for den magnetiske induktion af tre felter i det øjeblik, hvor, i det øjeblik, og i det øjeblik, hvor, og i fig. 351,c udføres additionen i henhold til parallelogramreglen for magnetiske induktioner og i disse tre øjeblikke, og retningerne af pilene og , og , og svarer til Fig. 351, en. Vi ser, at den resulterende magnetiske induktion har samme størrelse ved alle tre angivne momenter, men dens retning roterer for hver tredjedel af perioden med en tredjedel af cirklen.
Hvis en metalring (eller endnu bedre, en spole) er placeret i et sådant roterende felt, vil der blive induceret strømme i det på samme måde, som hvis ringen (spolen) roterede i et stationært felt. Det magnetiske felts vekselvirkning med disse strømme skaber kræfter, der roterer ringen (spolen). Dette er hovedideen med en trefaset motor med et roterende felt, først implementeret af M. O. Dolivo-Dobrovolsky.
Strukturen af en sådan motor er tydelig fra fig. 352. Dens stationære del - statoren - er en cylinder samlet af stålplade, på hvis indvendige overflade der er riller parallelt med cylinderaksen. Ledninger lægges i disse riller, indbyrdes forbundet langs statorens endesider, så de danner tre spoler roteret 120° i forhold til hinanden, som blev diskuteret i det foregående afsnit. Begyndelsen af disse spoler 1, 2, 3 og deres ender 1", 2", 3" er forbundet med seks klemmer, der er placeret på et skjold, der er monteret på maskinrammen. Placeringen af klemmerne er vist i fig. 353.
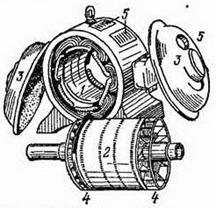
Ris. 352. Trefaset AC motor adskilt: 1 – stator, 2 – rotor, 3 – lejeskjolde, 4 – ventilatorer, 5 – ventilationshuller

Ris. 353. Placering af klemmer på motorskjoldet
Inde i statoren er den roterende del af motoren - dens rotor. Dette er også en cylinder samlet af separate stålplader, monteret på en aksel, sammen med hvilken den kan rotere i lejer placeret i motorens sideskjolde (dæksler). Ved kanterne af denne cylinder er der ventilationsblade, som, når rotoren roterer, skaber en stærk luftstrøm i motoren, der afkøler den. På den cylindriske overflade af rotoren, i riller parallelt med dens akse, er der en række ledninger forbundet med ringe ved enderne af cylinderen. En sådan rotor, vist separat i fig. 354, kaldes en "kortslutning" (nogle gange kaldet et "egernhjul"). Den begynder at rotere, når der opstår et roterende magnetfelt i rummet inde i statoren.
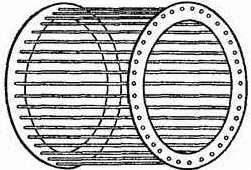
Ris. 354. Egern-burrotor af en trefaset motor
Det roterende felt skabes af et trefasesystem af strømme, der tilføres statorviklingerne, som kan forbindes med hinanden enten med en stjerne (fig. 355) eller en trekant (fig. 356). I det første tilfælde (§ 170) er spændingen på hver vikling flere gange mindre end netværkets lineære spænding, og i det andet er den lig med den. Hvis for eksempel spændingen mellem hvert par ledninger trefaset netværk(linjespænding) er 220 V, så når viklingerne er forbundet i en trekant, er hver af dem under en spænding på 220 V, og hvis de er forbundet med en stjerne, er hver vikling under en spænding på 127 V.
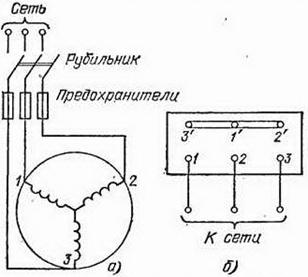
Ris. 355. Tænd for statorviklingerne med en stjerne: a) motorkoblingsdiagram; b) tilslutning af klemmerne på skjoldet. Terminaler 1", 2", 3" er forbundet "kortsigtet" af metalskinner; ledninger i et trefaset netværk er forbundet til terminaler 1, 2, 3
Ris. 356. Tænd for statorviklingerne med en trekant: a) motorkoblingsdiagram; b) tilslutning af klemmerne på skjoldet. Klemmer 1 og 3", 2 og 1", 3 og 2" er forbundet med metalskinner; ledninger i et trefaset netværk er forbundet til klemme 1, 2, 3
Således, hvis motorviklingerne er designet til en spænding på 127 V, så kan motoren fungere med normal effekt både fra et 220 V netværk, når dens viklinger er forbundet i en stjerne, og fra et 127 V netværk, når dens viklinger er tilsluttet i en trekant. Pladen, der er fastgjort til rammen af hver motor, angiver derfor to netspændinger, som denne motor kan arbejde ved, f.eks. 127/220 V eller 220/380 V. Ved tilslutning til et netværk med lavere netspænding tilsluttes motorviklingerne i en trekant, og når de drives fra Netværk med højere spændinger er forbundet med en stjerne.
Motorens drejningsmoment skabes af vekselvirkningskræfterne mellem magnetfeltet og strømmene induceret af det i rotoren, og styrken af disse strømme (eller den tilsvarende emk) bestemmes af feltets relative rotationsfrekvens i forhold til rotoren, som selv roterer i samme retning som felt. Derfor, hvis rotoren roterede med samme frekvens som feltet, ville der ikke være nogen relativ bevægelse. Så ville rotoren være i ro i forhold til feltet, og der ville ikke opstå induceret e i den. d.s., dvs. der ville ikke være nogen strøm i rotoren, og der kunne ikke opstå kræfter, der ville få den til at rotere. Det fremgår heraf, at en motor af den beskrevne type kun kan arbejde med en rotorhastighed, der er lidt forskellig fra felthastigheden, dvs. fra den aktuelle frekvens. Derfor kaldes sådanne motorer i teknologi normalt "asynkrone" (fra det græske ord "synchronos" - sammenfaldende eller koordineret i tid, betyder partiklen "a" negation).
Hvis feltet således roterer med en frekvens og rotoren med en frekvens, så sker rotationen af feltet i forhold til rotoren med en frekvens, og det er denne frekvens, der bestemmer den e, der induceres i rotoren. d.s. og nuværende.
Størrelse ![]() kaldet "glidning" i teknologi. Det spiller en meget vigtig rolle i alle beregninger. Slip udtrykkes normalt som en procentdel.
kaldet "glidning" i teknologi. Det spiller en meget vigtig rolle i alle beregninger. Slip udtrykkes normalt som en procentdel.
Når vi tænder for en ubelastet motor, så er den i de første øjeblikke lig med eller tæt på nul, frekvensen af feltets rotation i forhold til rotoren er stor og induceret i rotoren e. d.s. derfor er den også stor - den er 20 gange større end f.eks. d.s., som opstår i rotoren, når motoren kører med normal effekt. Strømmen i rotoren er også væsentligt højere end normalt. I startøjeblikket udvikler motoren et ganske betydeligt drejningsmoment, og da dens inerti er relativt lille, stiger rotorrotationsfrekvensen hurtigt og er næsten lig feltrotationsfrekvensen, så deres relative frekvens bliver næsten lig med nul og strømmen i rotoren falder hurtigt. Til små og medium kraft deres kortvarige overbelastning ved opstart udgør ikke en fare, men ved opstart er det meget kraftige motorer(tiere og hundreder af kilowatt) specielle startreostater bruges til at svække strømmen i viklingen; Når rotoren når normal hastighed, slukkes disse rheostater gradvist.
Når motorbelastningen stiger, falder rotorhastigheden en smule, feltrotationsfrekvensen i forhold til rotoren øges, og samtidig øges strømmen i rotoren og det drejningsmoment, som motoren udvikler. Dog at ændre motoreffekt fra nul til normal værdi En meget lille ændring i rotorhastigheden er påkrævet, op til ca. 6 % af den maksimale værdi. Så asynkron trefaset motor holder en næsten konstant rotorhastighed selv ved meget store belastningsudsving. Det er i princippet muligt at regulere denne frekvens, men de tilsvarende enheder er komplekse og uøkonomiske og bruges derfor meget sjældent i praksis. Hvis maskiner drevet af en motor kræver en anden omdrejningshastighed, end motoren giver, så foretrækker de at bruge gear- eller remdrev med forskellige udvekslingsforhold.
Det siger sig selv, at efterhånden som motorbelastningen stiger, det vil sige den mekaniske effekt, den producerer, skal ikke kun strømmen i rotoren stige, men også strømmen i statoren, så motoren kan optage den tilsvarende elektriske effekt fra netværket. Dette sker automatisk på grund af, at strømmen i rotoren også skaber sit eget magnetfelt i det omgivende rum, hvilket påvirker statorviklingerne og inducerer nogle f.eks. d.s. Forbindelsen mellem rotorens og statorens magnetiske flux, eller, som man siger, "ankerreaktion", forårsager ændringer i strømmen i statoren og sikrer, at den elektriske effekt fra netværket matches med mekanisk kraft givet af motoren. Detaljerne i denne proces er ret komplekse, og vi vil ikke gå ind i dem.
Det er dog meget vigtigt at huske, at selvom en underbelastet motor tager en sådan mængde energi fra netværket, der svarer til det arbejde, den udfører, når den er underbelastet, når strømmen i statoren falder, skyldes dette en stigning i statorens induktive reaktans, det vil sige et fald i effektfaktoren (§ 163), hvilket ødelægger driftsbetingelserne for netværket som helhed. Hvis for eksempel en effekt på 3 kW er nok til at betjene en maskine, og vi installerer en 10 kW motor på den, vil denne virksomhed næsten ikke lide skade - motoren vil stadig kun tage den effekt, der kræves til dens drift plus tab i selve motoren. Men sådan en underbelastet motor har en stor induktiv reaktans og reducerer netværkets effektfaktor. Det er urentabelt set fra et synspunkt national økonomi generelt. For at stimulere kampen for at forbedre effektfaktoren anvender organisationer, der leverer el til forbrugerne et bødesystem for at være for lav ift. etableret norm effektfaktor og incitamenter til at øge den.
Derfor, når du arbejder med motorer, skal følgende regler nøje overholdes:
1. Det er altid nødvendigt at vælge en motor med en sådan effekt, som den maskine, der faktisk drives af den, kræver.
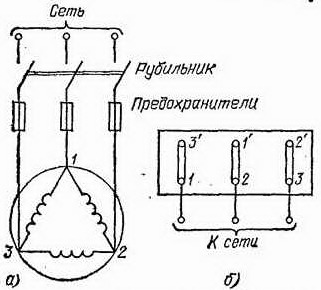
2. Hvis motorbelastningen ikke når 40% af normalen, og statorviklingerne er forbundet i et delta, så er det tilrådeligt at skifte dem til en stjerne. I dette tilfælde falder spændingen på viklingerne med en faktor, og magnetiseringsstrømmen - næsten tre gange. I tilfælde, hvor en sådan omskiftning skal foretages ofte, er motoren forbundet til netværket ved hjælp af en omskifter i henhold til diagrammet vist i fig. 357. I en position af kontakten er viklingerne forbundet med en trekant, i den anden - med en stjerne.
Ris. 357. Skema til at skifte motorviklingerne fra trekant (kontaktposition I, I, I) til stjerne (kontaktposition II, II, II)
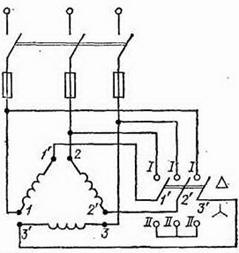
For at vende omdrejningsretningen af motorakslen er det nødvendigt at ombytte de to ledninger, der er forbundet til motoren. Dette opnås nemt ved hjælp af en dobbeltpolet kontakt som vist i fig. 358. Flytning af kontakten fra bestemmelser I-I til position II-II ændrer vi magnetfeltets rotationsretning og samtidig motorakslens rotationsretning.

Ris. 358. Skiftediagram til ændring af omdrejningsretningen for en trefaset motor
Vi har set, at hvis der er tre spoler i motorens stator, forskudt fra hinanden med 120°, roterer magnetfeltet med strømmens frekvens, det vil sige, det gør en omdrejning pr. brøkdel af et sekund, eller 3000 omdrejninger i minuttet. Motorakslen vil rotere med næsten samme frekvens. I mange tilfælde er denne rotationshastighed for høj. For at reducere det er der ikke placeret tre spoler i motorstatoren, men seks eller tolv og forbundet, så nord- og sydpolen veksler rundt om statorens omkreds. I dette tilfælde roterer feltet for hver aktuelle periode kun med en halv eller en fjerdedel af en omdrejning, dvs. maskinakslen roterer med en frekvens på omkring 1500 eller 750 omdrejninger pr. minut.
Til sidst en mere praktisk vigtig bemærkning. I tilfælde af beskadigelse (nedbrud) af isoleringen af rammen og husene elektriske maskiner og transformere får strøm i forhold til Jorden. Berøring af disse maskindele kan være farligt for mennesker under disse forhold. For at forhindre denne fare, ved spændinger over 150 V i forhold til jorden, skal rammerne og husene på elektriske maskiner og transformere jordes, dvs. forbinde dem sikkert med metalledninger eller stænger til jorden. Dette sker efter særlige regler, der skal følges nøje for at undgå ulykker.
Ganske ofte kræver driftstilstanden for hjælpemekaniseret udstyr en reduktion i standardrotationshastigheder. Denne effekt kan opnås ved at justere hastigheden asynkron motor med dine egne hænder. Sådan gør du i praksis (beregning og montage), vha standard kredsløb ledelse eller hjemmelavede enheder, lad os prøve at finde ud af det yderligere.
- Sårede rotormotorer
Hvad er en asynkronmotor?
AC-motorer har fundet ganske bred anvendelse på forskellige områder af vores liv, i løft, transport, forarbejdning, måleudstyr. De bruges til at transformere elektrisk energi, som kommer fra netværket, ind i den roterende aksels mekaniske energi. Oftest bruges de asynkrone omformere AC. I dem er rotationshastigheden af rotoren og statoren anderledes. En strukturel luftspalte er tilvejebragt mellem disse aktive elementer.
Både statoren og rotoren har en stiv kerne lavet af elektrisk stål (sammensat type, lavet af plader), der fungerer som et magnetisk kredsløb, samt en vikling, der passer ind i kernens strukturelle riller. Det er måden, hvorpå rotorviklingen er organiseret eller lagt ud, der er nøglekriteriet for klassificering af disse maskiner.
Egern-burmotorer (SCR)
Her bruges en vikling i form af aluminium-, kobber- eller messingstænger, som indsættes i kernens riller og lukkes på begge sider af skiver (ringe). Typen af forbindelse af disse elementer afhænger af motorkraften: for små værdier bruges metoden til fælles støbning af skiver og stænger, og for store værdier anvendes separat produktion efterfulgt af svejsning til hinanden. Et typisk design af sådanne motorer kan ses i illustrationen nedenfor. Statorviklingen er forbundet ved hjælp af delta- eller stjernekredsløb.
Sårede rotormotorer
Opretter forbindelse til netværket trefaset vikling rotor, gennem slæberinge på hovedakslen og børster. "Stjerne"-ordningen tages som grundlag. Nedenstående figur viser et typisk design af en sådan motor.

Driftsprincip og hastighed for asynkronmotorer
Lad os overveje dette problem ved at bruge eksemplet med ADKR, som den mest almindelige type elektriske motorer i løfte-, transport- og procesudstyr. Netspændingen tilføres statorviklingen, hvor hver af de tre faser er geometrisk forskudt med 120°. Efter påføring af spænding opstår et magnetfelt, som ved induktion skaber en EMF og en strøm i rotorviklingerne. Sidstnævnte forårsager elektromagnetiske kræfter, der får rotoren til at rotere. En anden grund til, at alt dette sker, nemlig EMF opstår, er forskellen i hastigheden af statoren og rotoren.
En af nøgleegenskaber af enhver ADCR er rotationsfrekvensen, som kan beregnes ved hjælp af følgende forhold:
n=60f/p, rpm
hvor f er frekvensen af netspændingen, Hz; p – antal statorpolpar.
Alle tekniske specifikationer angivet på en metalplade fastgjort til huset. Men hvis det mangler af en eller anden grund, så kan og bør antallet af omdrejninger bestemmes manuelt ved hjælp af indirekte indikatorer. Typisk anvendes tre hovedmetoder:
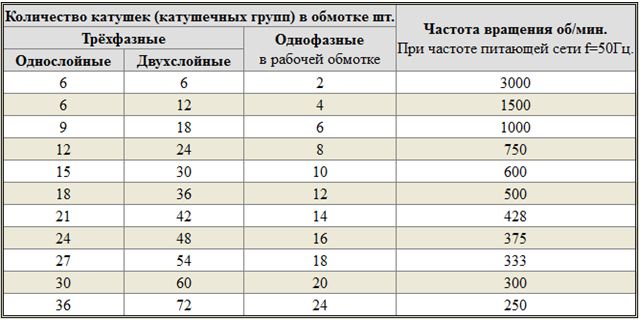
- Beregning af antallet af spoler. Den resulterende værdi sammenlignes med nuværende standarder for spænding 220 og 380V (se tabel nedenfor);
- Beregning af omdrejninger under hensyntagen til viklingens diametriske stigning. For at bestemme, bruges en formel af formen:
hvor 2p – antal poler; Z 1 - antal slidser i statorkernen; y – faktisk trinnet med at lægge viklingen.
Standardhastighedsværdier kan således præsenteres i tabellen:

- Beregning af antallet af poler langs statorkernen. Brugt matematiske formler, hvor det tages i betragtning geometriske parametre produkter:
2p = 0,35Z 1 b/h eller 2p = 0,5D i/h,
hvor 2p – antal poler; Z 1 - antal slidser i statoren; b – tandbredde, cm; h – ryglænshøjde, cm; D i – indvendig diameter dannet af kernetænderne, cm.
Efter dette, baseret på de opnåede data og magnetisk induktion, er det nødvendigt at bestemme antallet af omdrejninger, som kontrolleres i forhold til motorernes pasdata.
Måder at ændre motorhastighed på
Justering af hastigheden af enhver trefaset elektrisk motor, der bruges i løfte- og transportmaskiner og -udstyr, giver dig mulighed for at opnå de nødvendige driftstilstande nøjagtigt og jævnt, hvilket ikke altid er muligt, for eksempel på grund af mekaniske gearkasser. I praksis bruges syv hovedmetoder til korrektion af rotationshastighed, som er opdelt i to nøgleområder:
- Ændring i hastigheden af magnetfeltet i statoren. Opnås ved frekvensregulering, skift af antallet af polpar eller spændingskorrektion. Det skal tilføjes, at disse metoder er anvendelige til elektriske motorer med egern-bur rotor;
- Ændring af mængden af slip. Denne parameter kan justeres ved at bruge forsyningsspændingen, tilslutte yderligere modstand til elektriske kredsløb rotor, brug af en ventilkaskade eller dobbelt forsyning. Anvendes til modeller med viklet rotor.
De mest populære metoder er spændings- og frekvensregulering (ved brug af omformere) samt ændring af antallet af polpar (implementeret ved at organisere en ekstra vikling med koblingsevner).
Typiske hastighedsregulatorkredsløb
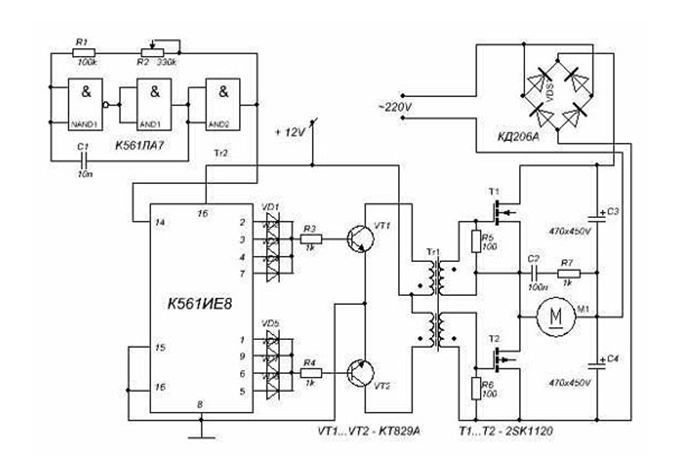
På markedet i dag kan du se et ret bredt udvalg af regulatorer og frekvensomformere til asynkronmotorer. Til husholdningsbehov kan løfte- eller behandlingsudstyr dog beregnes og samles på et mikrokredsløb hjemmelavet enhed baseret på tyristorer eller kraftige transistorer.
Et eksempel på et kredsløb med en tilstrækkelig kraftig regulator til en asynkronmotor kan ses i illustrationen nedenfor. På grund af dette kan du opnå en jævn kontrol af dens driftsparametre, reducere energiforbruget med op til 50 % og reducere vedligeholdelsesomkostningerne.
Denne ordning er kompleks. Til huslige behov kan det forenkles betydeligt ved at bruge en triac, for eksempel VT138-600, som et arbejdselement. I dette tilfælde vil diagrammet se således ud:

Motorhastigheden vil blive reguleret af et potentiometer, som bestemmer fasen af indgangsimpulsen, der åbner triacen.
Som det kan bedømmes ud fra de oplysninger, der er præsenteret ovenfor, afhænger ikke kun dets driftsparametre, men også effektiviteten af det motordrevne løfte- eller behandlingsudstyr af hastigheden af en asynkron motor. I handelsnetværk I dag kan du købe en bred vifte af regulatorer, men du kan også lave beregninger og samle en effektiv enhed med dine egne hænder.
Før du vælger et tilslutningsdiagram for en enfaset asynkronmotor, er det vigtigt at bestemme, om der skal vendes. Hvis du for korrekt drift ofte skal ændre rotorens rotationsretning, er det tilrådeligt at organisere vending ved hjælp af en trykknapstation. Hvis envejsrotation er nok for dig, så vil den klare sig uden muligheden for at skifte. Men hvad skal du gøre, hvis du efter at have oprettet forbindelse via den beslutter dig for, at retningen stadig skal ændres?
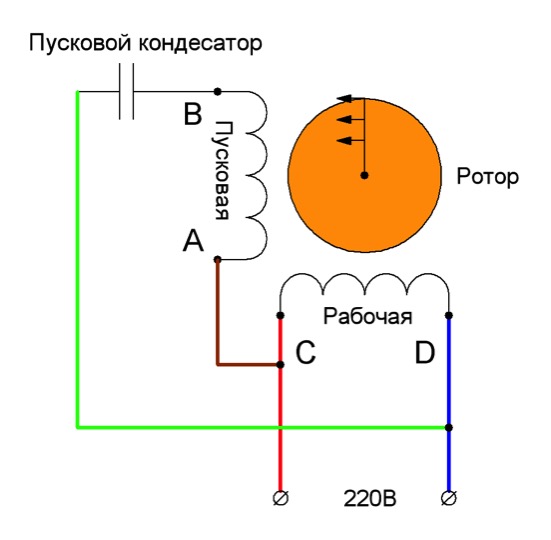
Lad os antage, at en asynkron enfaset motor Til at begynde med er akselrotationen rettet med uret, som på billedet nedenfor.
Lad os præcisere de vigtige punkter:
- Punkt A markerer begyndelsen begynder vikling, og punkt B er dens afslutning. En brun ledning er forbundet til den oprindelige terminal A, og en grøn ledning er forbundet til den endelige terminal.
- Punkt C markerer begyndelsen af arbejdsviklingen, og punkt D markerer dens slutning. En rød ledning er forbundet til den indledende kontakt, og en blå ledning er forbundet til den endelige kontakt.
- Rotorens rotationsretning er angivet med pile.
Vi sætter os selv til opgave at vende en enfaset motor uden at åbne dens hus, så rotoren begynder at rotere i den anden retning (i i dette eksempel mod uret). Det kan løses på tre måder. Lad os se nærmere på dem.
Mulighed 1: gentilslutning af arbejdsviklingen
For at ændre motorens rotationsretning kan du kun skifte begyndelsen og slutningen af den arbejdende (permanent på) vikling, som vist på figuren. Du tror måske, at for at gøre dette skal du åbne kabinettet, tage viklingen ud og vende den. Det er ikke nødvendigt at gøre dette, fordi det er nok at arbejde med kontakterne udefra:
- Der skal være fire ledninger ud af huset. 2 af dem svarer til begyndelsen af arbejds- og startviklingerne og 2 til deres ender. Bestem hvilket par der kun hører til arbejdsviklingen.
- Du vil se, at to linjer er forbundet til dette par: fase og nul. Med motoren slukket, vend fasen ved at skifte fasen fra den indledende viklingskontakt til den sidste, og nul - fra den sidste til den indledende. Eller omvendt.

Som et resultat får vi et diagram, hvor punkt C og D skifter plads med hinanden. Nu vil rotoren på asynkronmotoren rotere i den anden retning.
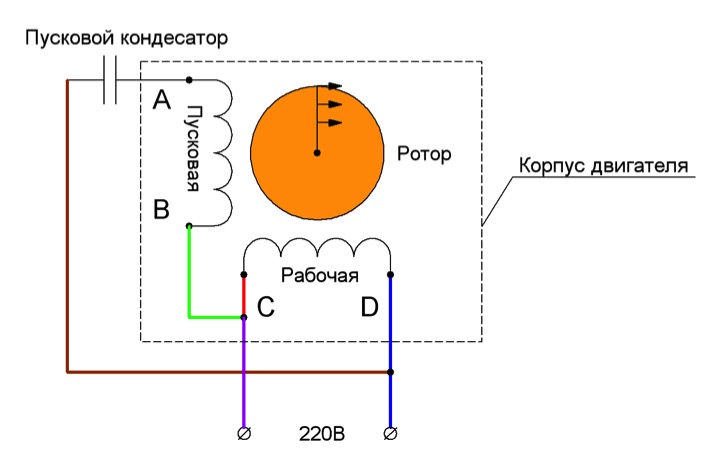
Mulighed 2: gentilslutning af startviklingen
Den anden måde at organisere det omvendte af en 220 volt asynkronmotor på er at skifte begyndelsen og slutningen af startviklingen. Dette gøres analogt med den første mulighed:
- Af de fire ledninger, der kommer ud af motorboksen, skal du finde ud af, hvilken af dem der svarer til starthanerne.
- Indledningsvis blev ende B af startviklingen forbundet med begyndelsen C af arbejdsviklingen, og begyndelsen A blev forbundet til start-opladningskondensatoren. Du kan vende en enfaset motor ved at forbinde kapacitansen til klemme B og begyndelsen af C til begyndelsen af A.
Efter handlingerne beskrevet ovenfor får vi et diagram som i figuren ovenfor: punkt A og B har byttet plads, hvilket betyder at rotoren begyndte at dreje i den modsatte retning.
Mulighed 3: ændring af startviklingen til arbejdsviklingen og omvendt
Organiser omvendt enfaset motor 220V på de ovenfor beskrevne måder er kun muligt på betingelse af, at udtag fra begge viklinger med alle begyndelser og ender kommer ud af huset: A, B, C og D. Men der er ofte motorer, hvor producenten med vilje kun efterlod 3 kontakter uden for. På denne måde beskyttede han enheden mod forskellige "hjemmelavede produkter". Men der er stadig en vej ud.
Figuren ovenfor viser et diagram over en sådan "problematisk" motor. Den har kun tre ledninger, der kommer ud af huset. De er markeret med brun, blå og lilla blomster. De grønne og røde linjer svarende til enden B af startviklingen og begyndelsen C af arbejdsviklingen er indbyrdes forbundet internt. Vi vil ikke kunne få adgang til dem uden at skille motoren ad. Derfor er det ikke muligt at ændre rotorrotationen ved at bruge en af de to første muligheder.
I dette tilfælde skal du gøre dette:
- Fjern kondensatoren fra den oprindelige terminal A;
- Tilslut den til den endelige terminal D;
- Vandhaner startes fra ledningerne A og D, samt fasen (du kan vende den ved hjælp af en tast).
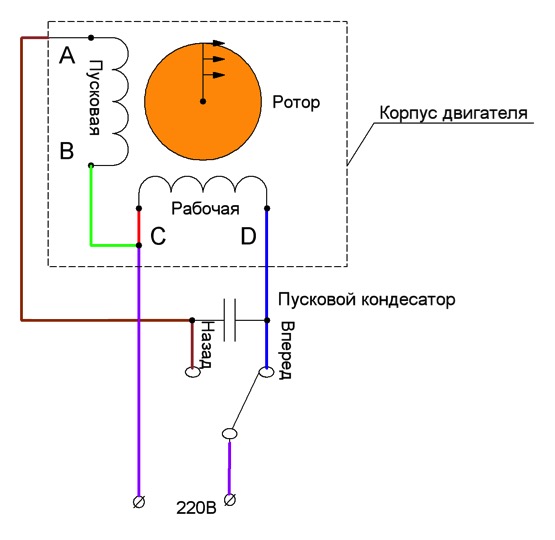
Se på billedet ovenfor. Nu, hvis du forbinder fasen til tap D, roterer rotoren i én retning. Hvis fase ledning overførsel til gren A, kan du ændre omdrejningsretningen i den modsatte retning. Vende kan udføres ved manuelt at frakoble og forbinde ledningerne. Brug af en nøgle hjælper med at gøre arbejdet lettere.
Vigtig! Sidste mulighed omvendt kredsløb Tilslutningen af den asynkrone enfasede motor er forkert. Det kan kun bruges, hvis følgende betingelser er opfyldt:
- Længden af start- og arbejdsviklingerne er den samme;
- Deres tværsnitsareal svarer til hinanden;
- Disse ledninger er lavet af samme materiale.
Alle disse mængder påvirker modstanden. Den skal være konstant ved viklingerne. Hvis længden eller tykkelsen af ledningerne pludselig adskiller sig fra hinanden, så efter at du har organiseret det omvendte, viser det sig, at modstanden af arbejdsviklingen bliver den samme som den var før for startviklingen og omvendt. Dette kan også forårsage, at motoren ikke starter.
Feltet vil pulsere. Da rækkefølgen af omskiftning af vekselretterens udgange kan ændres programmæssigt, er det let at ændre spændingsskiftet på viklingerne og derfor ændre motorrotorens rotationsretning. På samme måde finder vi begyndelsen og slutningen af den anden vikling og betegner dem C2 og C5, og begyndelsen og slutningen af den tredje - SZ og C6. I gennemsnit, for hver procent stigning i spænding, forbruges reaktiv effekt stiger med 3 % eller mere (hovedsageligt på grund af en stigning i strømstyrken tomgangshastighed motor), hvilket igen fører til øgede tab aktiv effekt i elementer elektrisk netværk. Med en sådan forbindelse, lineær spænding mere end fasespændingen med 1,73 gange.
Denne metode er den mest "ældste", det skyldes fraværet, indtil for nylig, af frekvensregulatorer og deres relativt til en høj pris. En spænding på 380V påføres mellem enderne af viklingerne AB, BC, CA.
Rotationsregulator asynkron elektrisk motor 220V fungerer som en enhed, der ændrer pumpehjulets rotationshastighed og udgangstrykket (det regulerer næsten hele det mulige effektområde - IKKE FREKVENSER!).
På nogle motorer bringes enderne af viklingsfaserne ud på klempladen. Hvordan viklingerne er forbundet med en eller anden konfiguration er vist i figurerne nedenfor.
For at ændre rotationsretningen for en trefaset elektrisk motor, er det nødvendigt at ombytte to af de tre faser på det punkt, hvor strømmen er forbundet til motoren.
Motorer med effekt over 1,5 kW kræver en tilslutning og en startkondensator. Disse crimpringe er dog tabt. Først bestemmes ledningernes tilhørsforhold til statorviklingens individuelle faser.
Diagrammet af løfteraketten er vist i figuren nedenfor.
Ofte er der behov for at tilslutte en trefaset elmotor i en dattergård, men der er kun enkeltfaset netværk(220 V).
Asynkrone elektriske motorer findes i to hovedtyper: med en viklet rotor og med en egern-burrotor, hvor forskellen ligger i de forskellige designs af rotorviklingen. Dette sker, fordi vi forbinder en 3-faset motor til et enfaset netværk. Den primære vikling indeholder 120 vindinger tråd med en diameter på 0,7 mm, med et tap fra midten, sekundærviklingen indeholder to separate vindinger på 60 vindinger af samme tråd. Spændingsværdien afhænger i sidste ende af maskinens egenskaber og kondensatorernes kapacitans. Det er kendt, at modstanden af en kold glødetråd i en glødelampe er 10 gange mindre end modstanden af en varm glødetråd.
Hvis du tænder for IM i et 1-faset netværk, vil drejningsmomentet kun blive skabt af en vikling.
I dette tilfælde er motorviklingerne forbundet i serie. Når lyset tændes, betyder det, at de 2 klemmer tilhører samme fase. Tags K1 og H3 (eller H2) placeres på terminalerne placeret i fælles knob (bundet under den første del af arbejdet) med henholdsvis H1 og K3. For at skabe det er det nødvendigt at skifte faserne på viklingerne ved hjælp af et specielt kredsløb.
Kondensatorer blev brugt som KBG-MN eller andre med en driftsspænding på mindst 400 V. Når generatoren blev slukket, var der elektrisk ladning, så de var forsvarligt indhegnet for at undgå elektrisk stød.
At forbinde motoren i henhold til et ret sjældent stjernekredsløb ved opstart, med efterfølgende overførsel til et deltakredsløb for drift i driftstilstand. Motoren begynder at give en karakteristisk lyd (brum). Motoren skiftes fra en spænding til en anden ved at forbinde viklingerne. Du bør ikke overbelaste motoren og arbejde "dag og nat".
Hvis motoren stadig brummer efter dette, skal denne fase også indstilles som før, og den næste fase skal drejes - II.
Ulemperne er: reduceret og pulserende drejningsmoment af en enfaset motor; øget opvarmning; ikke alle standardkonvertere er klar til sådan arbejde, fordi... Nogle producenter forbyder direkte brugen af deres produkter i denne tilstand.
Hvis du bruger lysdæmperen i overensstemmelse med dens formål og overholder alle brugsbetingelser, kan du opnå gode resultater til styring af lyskilder indendørs og udendørs.