Ngay trước cuối tuần này, động cơ không đồng bộ AOL 22-4 của tôi có công suất 400 (W), được lắp trong bộ điều khiển giai đoạn chuyển đổi vòi đang tải, đã bị lỗi máy biến áp.
Nguyên nhân dẫn đến sự cố của nó là do chập mạch cuộn dây. Tình trạng này cực kỳ hiếm xảy ra nhưng thỉnh thoảng vẫn xảy ra. Điều kiện vận hành khiến họ cảm thấy - hàm lượng bụi than tăng lên. Có thể vấn đề thậm chí không phải là điều kiện vận hành mà là do dây chất lượng thấp được cung cấp để sửa chữa động cơ.
Chà, vì phải tháo rời một động cơ điện bị cháy nên tôi đồng thời quyết định viết một bài về động cơ không đồng bộ (IM), ứng dụng và thiết kế của nó.
Công dụng và mục đích của huyết áp
TRONG Gần đâyĐộng cơ không đồng bộ được sử dụng rất rộng rãi, cả trong công nghiệp dưới dạng ổ điện, máy nghiền bi, băng tải, máy bơm, máy nghiền, máy khoan và máy chà nhám, và trong cuộc sống hàng ngày. Đơn giản là không thể liệt kê tất cả các lĩnh vực ứng dụng.
Tại sao chúng được sử dụng rộng rãi như vậy?
Có, bởi vì họ có một số lợi thế so với những người khác máy điện, ví dụ, có độ tin cậy cao, dễ bảo trì và không kém phần quan trọng là chúng có thể hoạt động trực tiếp từ mạng điện áp xoay chiều.
Thiết bị của động cơ không đồng bộ (IM)
Bây giờ chúng ta chuyển sang thiết kế động cơ không đồng bộ bằng ví dụ về AOL 22-4 với công suất 400 (W).

Tôi đã nói cao hơn một chút rằng động cơ không đồng bộ AOL 22-4 được lắp trong bộ dẫn động của thiết bị chuyển mạch bộ đổi vòi đang tải của máy biến áp nguồn (17 bước). Bản thân ổ đĩa trông như thế này.

Động cơ được cấp nguồn từ mạng có dây trung tính cách ly với điện áp tuyến tính 220 (V).
Nhân tiện, động cơ này đã được sửa đổi đặc biệt để phù hợp với nhu cầu của chúng tôi.
Do đó, trên thẻ của nó, bạn sẽ thấy ký hiệu thay vì 220/380 (V), 220/380 (V) (bị gạch bỏ trên thẻ 380 và một hình tam giác), tức là. cuộn dây của nó được quấn lại đến điện áp 127 (V).

Vì vậy, khi đường dây điện áp Chúng tôi kết nối cuộn dây stato 220 (V) thành một ngôi sao. Mặc dù về nguyên tắc chúng tôi không thu thập. Sau khi sửa xong tôi nhờ trưởng bộ phận cuộn dây lắp ngôi sao vào bên trong mô tơ và chỉ nối 3 chân vào khối (cực) thay vì 6.

Động cơ không đồng bộ(AD) gồm hai phần cách nhau bởi một khe hở không khí. Phần đầu tiên là stato đứng yên và phần thứ hai là rôto chuyển động hoặc quay.
Cả stato và rôto đều bao gồm lõi và cuộn dây. Nhưng cuộn dây stato là cuộn sơ cấp, tức là được kết nối với mạng và cuộn dây rôto là thứ cấp. Bạn có thể đọc thêm về điều này trong bài viết về nguyên lý hoạt động của động cơ điện không đồng bộ.
Về mặt cấu trúc, chúng được chia thành 2 loại:
- huyết áp với roto lồng sóc
- IM với rôto vết thương
Động cơ AOL 22-4 bị cháy của tôi, như bạn có thể đoán, đặc biệt đề cập đến một động cơ không đồng bộ có rôto lồng sóc.
Động cơ cảm ứng lồng sóc
Stator của động cơ như vậy bao gồm:
- nhà ở có khung
- cốt lõi
- cuộn dây ba pha
Thân máy thường được làm bằng hợp kim nhôm hoặc gang. Trong ví dụ của tôi, AOL 22-4 có thân nhôm với khung nhôm.

Lõi stato được ép nhiều lớp, tức là được lắp ráp từ các tấm thép cách điện mỏng phủ vecni cách điện. Độ dày của các tấm này khoảng 0,35 đến 0,5 (mm). Điều này được thực hiện nhằm giảm dòng điện xoáy xuất hiện trong quá trình đảo chiều từ hóa của lõi “sắt” dưới tác động của một chuyển động quay. từ trường.
VỚI bên trong Trong lõi stato của động cơ không đồng bộ có các rãnh dọc để đặt cuộn dây.

Cuộn dây có thể là một lớp hoặc nhiều lớp.
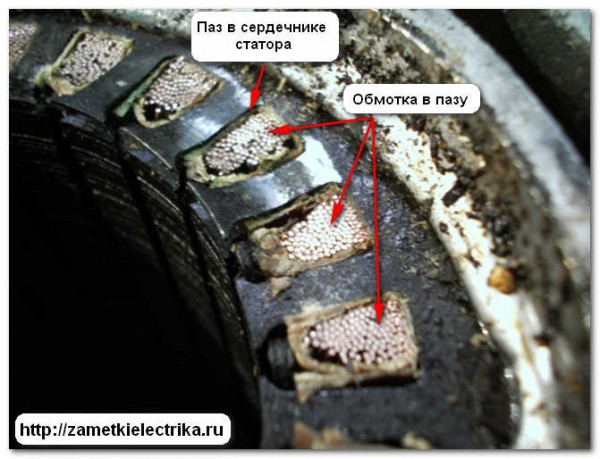
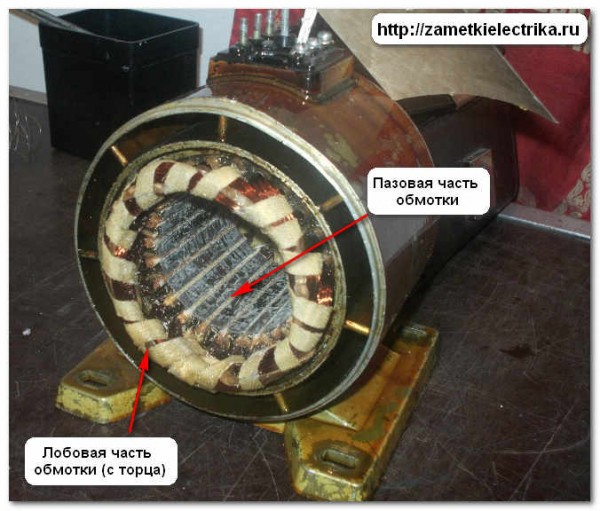
Phần cuộn dây nằm trong các rãnh được gọi là cuộn dây có rãnh.
Các phần có rãnh của cuộn dây bên ngoài lõi (từ đầu) được nối với các phần phía trước của cuộn dây.
Đó là tất cả cho stator. Bây giờ chúng ta hãy chuyển sang cách thiết kế rôto. Như mình đã nói ở trên, rôto là bộ phận quay của động cơ không đồng bộ. Nó bao gồm một trục và một lõi có cuộn dây ngắn mạch.
Nhân tiện, cuộn dây ngắn mạch của động cơ không đồng bộ còn được gọi là "bánh xe sóc".
Cuộn dây của rôto lồng sóc bao gồm một dãy thanh nhôm hoặc đồng (ít phổ biến hơn) nằm trong các rãnh của lõi rôto. Các thanh này được đóng kín ở cả hai bên bằng các vòng ngắn mạch.
Lõi rôto, giống như lõi stato, có thiết kế nhiều lớp, nhưng các tấm thép điện của nó không được phủ một lớp sơn bóng mà được phủ một lớp màng oxit mỏng. Điều này khá đủ để hạn chế dòng điện xoáy nhỏ do sự đảo chiều từ hóa của lõi không thường xuyên.
Trong hầu hết các trường hợp, cuộn dây ngắn mạch của rôto IM được thực hiện bằng cách đổ lõi đã lắp ráp bằng hợp kim nhôm nóng chảy. Trong trường hợp này, cả vòng ngắn mạch và cánh thông gió đều được đúc cùng lúc.

Trục rôto lồng sóc quay trên hai ổ lăn (có thể thấy chúng trong hình trên), được đặt trong các tấm chắn ổ trục.

Tôi sẽ nói với bạn một vài lời về việc làm mát động cơ không đồng bộ.
Việc làm mát động cơ không đồng bộ có công suất lên tới 15 (kW) xảy ra bằng cách thổi bề mặt bên ngoài của động cơ bằng quạt ly tâm. Bản thân quạt được bao phủ bởi một vỏ bảo vệ có lỗ để hút khí.
Hình ảnh một loại động cơ khác.
![]()
Việc làm mát động cơ không đồng bộ có công suất lớn hơn 15 (kW), ngoài phương pháp mô tả ở trên, được thực hiện bằng hệ thống thông gió bên trong. Có những lỗ đặc biệt trên các tấm chắn ổ trục, chúng được gọi là "rèm", qua đó không khí, với sự trợ giúp của quạt, đi qua khoang bên trong của động cơ. Trong trường hợp này, không khí xâm nhập vào các bộ phận được làm nóng của cuộn dây và lõi, giúp làm mát hiệu quả hơn.
Ngoài ra, để tăng diện tích làm mát, động cơ không đồng bộ có thể có bề mặt các gân dọc.

Để bảo vệ con người khỏi bị phơi nhiễm, động cơ cảm ứng phải được nối đất. Với mục đích này, có những bu lông (ốc vít) đặc biệt để nối đất. Thông thường, một bu lông (vít) nằm trên vỏ động cơ.
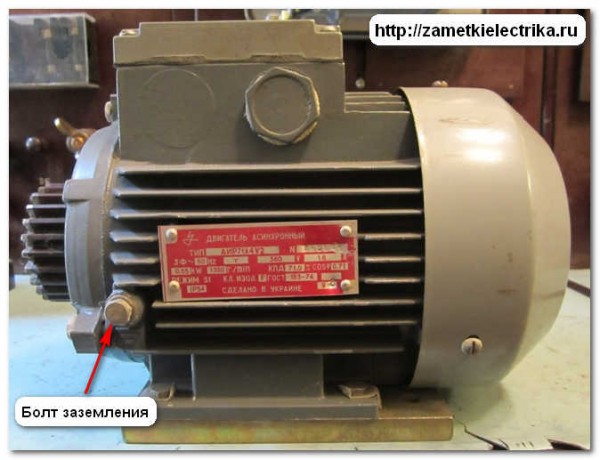
Và cái còn lại nằm trong khối thiết bị đầu cuối.

IM với rôto lồng sóc có một nhược điểm đáng kể là bị hạn chế mô-men xoắn khởi động do các thanh bị đoản mạch, điều này không thể nói đến với IM có rôto dây quấn.
Thiết kế stato của động cơ cảm ứng rôto dây quấn tương tự như thiết kế stato của động cơ cảm ứng lồng sóc.

Nhưng có sự khác biệt lớn trong thiết kế của rôto.
Rôto của động cơ như vậy có thiết kế phức tạp. Một lõi nhiều lớp có cuộn dây ba pha được gắn vào trục của nó. Phần đầu của cuộn dây được nối với nhau bằng một ngôi sao và phần cuối của chúng được nối với các vòng trượt. Các vòng này cũng được đặt trên trục rôto và được cách ly với trục cũng như với nhau.
Để tiếp xúc với cuộn dây của rôto quay, hai chổi than chì kim loại được cung cấp trên mỗi vòng. Bàn chải được đặt trong giá đỡ bàn chải, được trang bị lò xo để cung cấp lực cần thiết để ấn bàn chải vào vòng trượt.
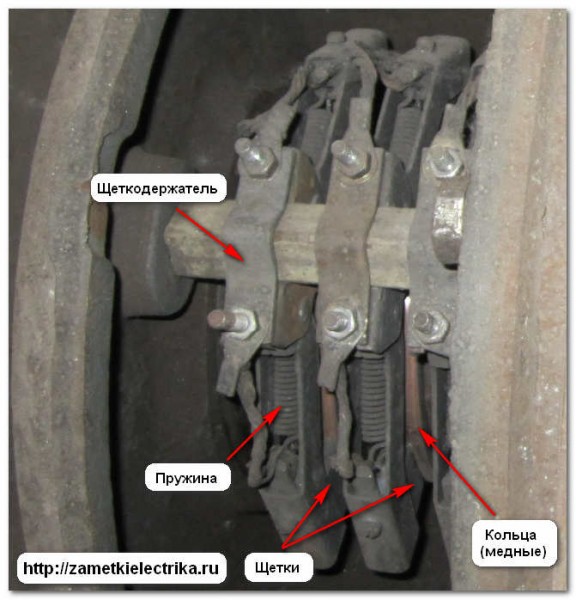
Như vậy, cuộn dây ba pha Rôto được nối với một biến trở khởi động bên ngoài, tạo ra điện trở bổ sung trong mạch rôto.
Tại sao điều này lại cần thiết, bạn sẽ học được từ các bài viết sau trong phần “
Động cơ không đồng bộ ba pha Dòng điện xoay chiềuđược sử dụng để chuyển đổi năng lượng điện thành năng lượng cơ học. Đây là loại phổ biến nhất máy điệnđược sử dụng trong công nghiệp.
Một động cơ như vậy bao gồm ba phần chính:
- rôto;
- stato;
- nhà ở (vỏ);
Khung bảo vệ stato và rôto khỏi hư hỏng cơ học và dùng để cố định các bộ phận chuyển động và cố định của động cơ không đồng bộ (IM) trong đó.
Stator là phần đứng yên của động cơ không đồng bộ. Nó bao gồm một khung và một mạch từ. Lõi từ được ép vào khung động cơ và tạo thành lõi điện từ của stato. Lõi từ hóa máy và tạo ra từ trường quay. Nó được lắp ráp thành các tấm mỏng được dập từ thép tấm điện. Các tấm này được lắp ráp và cố định sao cho các răng và rãnh của stato được hình thành trong mạch từ. Lõi từ cung cấp điện trở từ thấp đối với từ thông, làm tăng từ thông của động cơ cảm ứng. Stator và rôto được ngăn cách bởi một khe hở không khí.
Cánh quạtĐộng cơ không đồng bộ là bộ phận chuyển động của máy điện.
Stator động cơ không đồng bộ
Stator là bộ phận đứng yên của động cơ không đồng bộ. Từ này có nguồn gốc tiếng Anh từ từ stator, từ này lại có nguồn gốc Latin từ từ sto - đứng. Thuật ngữ stato của động cơ không đồng bộ thường có nghĩa là sự kết hợp của một số thành phần:
- Giường có chân hoặc mặt bích và có cánh tản nhiệt dọc;
- Cốt lõi;
- Cuộn dây stato;
Lõi stato được chế tạo nhiều lớp, ghép từ các tấm stato riêng lẻ. Điều này được thực hiện để giảm tổn thất do dòng điện xoáy. Các tấm stato được dập từ các tấm thép điện có độ dày từ 0,28 đến 1 mm. Chúng bị cô lập với nhau theo quy mô. Lõi của động cơ có chiều cao trục quay 50-132 mm sử dụng thép không hợp kim cán nguội mác 2013. Đối với động cơ có chiều cao trục 160-250 mm, lõi được chế tạo bằng thép hợp kim nhẹ cán nguội mác 2212. Trong động cơ có chiều cao trục quay từ 280 đến 355 mm, thép cán nóng loại 1312 được sử dụng. Gói tấm stato dành cho động cơ có chiều cao trục quay từ 50 đến 60 mm được buộc chặt bằng hàn hoặc sử dụng ghim và trong động cơ. với chiều cao trục quay từ 200 đến 250 mm, chỉ có ghim. Ở động cơ có chiều cao trục quay 280-355 mm, các tấm lõi được lắp ráp trực tiếp vào khung, sau đó chúng được ép và cố định bằng các phím vòng đặc biệt. Đây là cách hình thành phần stato của mạch từ của động cơ không đồng bộ.

Tấm đơn stato và chồng tấm stato của động cơ cảm ứng
Rôto động cơ không đồng bộ

Cuộn dây được sử dụng rộng rãi nhất được chế tạo dưới dạng "lồng sóc". Hệ thống nhận được tên này do các thanh có vòng ngắn mạch, trông giống như một bánh xe lồng sóc. Cuộn dây rôto của động cơ lớn bao gồm các thanh đồng thau hoặc đồng, được dẫn vào các rãnh và các vòng ngắn mạch được lắp ở hai đầu để hàn hoặc hàn các thanh này vào. Đối với huyết áp thấp nối tiếp và công suất trung bình Cuộn dây rôto được chế tạo bằng cách ép phun hợp kim nhôm.

Cuộn dây rôto của động cơ không đồng bộ có rôto dây quấn 3 được quấn giống như cuộn dây stato 2. Phần đầu của cuộn dây rôto được nối với nhau và cách điện. Các đầu của cuộn dây như vậy được hàn vào các vòng trượt 4, nằm trên trục động cơ bằng chổi than cố định 5; một biến trở điều chỉnh khởi động có thể được nối với các vòng trượt. Sơ đồ này cho phép bạn đưa thêm điện trở vào mạch rôto, từ đó điều chỉnh tốc độ động cơ và giảm mạnh dòng khởi động.
Bộ Khoa học và Giáo dục Liên bang Nga
Cơ quan Giáo dục Liên bang
Cơ sở giáo dục nhà nước
Giáo dục chuyên nghiệp cao hơn
Nghiên cứu quốc gia
TRƯỜNG ĐẠI HỌC KỸ THUẬT BANG IRKUTSK
Khoa Cung cấp Điện và Kỹ thuật Điện
Động cơ không đồng bộ lồng sóc ba pha
Báo cáo thí nghiệm số 11
bằng kỷ luật” Kỹ thuật điện tổng hợp và điện tử"
Hoàn thành
Học sinh SMO-11-1 ________ Kopytko Ya.V. 20.10.2012
Phó Giáo sư, Khoa E và ET ________ Kiryukhin Yu.A. __________
(ký tên) Họ I.O. (ngày của)
Irkutsk 2012
Mục tiêu 3
1 Thông tin lý thuyết tóm tắt 3
Thiết bị lắp đặt điện 7
2 Lệnh công việc 7
3 Tính toán phần 9
4 Biểu đồ 10
Câu hỏi kiểm tra 14
Tài liệu tham khảo 17
Mục tiêu của công việc
Làm quen với thiết kế và nguyên lý hoạt động của động cơ không đồng bộ ba pha rôto lồng sóc và khảo sát ảnh hưởng của điện áp lên quạt stato đến đặc tính của nó.
1 Thông tin lý thuyết tóm tắt
1) Thiết kế, nguyên lý hoạt động của động cơ không đồng bộ.
Động cơ cảm ứng là một máy điện xoay chiều. Từ “không đồng bộ” có nghĩa là không đồng thời. Điều này có nghĩa là trong động cơ không đồng bộ, tốc độ quay của từ trường khác với tốc độ quay của rôto. Các bộ phận chính của máy là stato và rôto, được ngăn cách với nhau bằng một khe hở không khí đồng đều.
Stator là bộ phận đứng yên của máy. Để giảm tổn thất do dòng điện xoáy, lõi của nó được làm từ các tấm thép cách điện dập dày 0,35 - 0,5 mm, cách ly với nhau bằng một lớp sơn bóng. Cuộn dây được đặt trong các rãnh của mạch từ stato. Trong động cơ ba pha, cuộn dây là ba pha. Các pha cuộn dây có thể được kết nối theo hình ngôi sao hoặc hình tam giác tùy thuộc vào độ lớn của điện áp mạng.
Rôto là bộ phận quay của động cơ. Lõi từ của rôto là một hình trụ được làm từ các tấm thép điện được dập. Các cuộn dây được đặt trong các rãnh rôto. Tùy thuộc vào loại cuộn dây, rôto của động cơ không đồng bộ được chia thành lồng sóc và pha (có vòng trượt). Cuộn dây ngắn mạch bao gồm các thanh đồng hoặc nhôm không cách điện được nối ở hai đầu bằng các vòng làm bằng cùng một vật liệu (“lồng sóc”).
Rôto pha có cuộn dây ba pha được đặt trong các rãnh của mạch từ, các pha được nối với nhau bằng một ngôi sao. Đầu tự do của các pha cuộn dây được nối với ba vòng trượt bằng đồng gắn trên trục động cơ. Các vòng trượt được cách ly với nhau và với trục. Bàn chải carbon hoặc than chì được ép vào các vòng. Thông qua các vòng trượt và chổi than, một biến trở khởi động ba pha có thể được nối với cuộn dây rôto.
Việc chuyển đổi năng lượng điện thành năng lượng cơ học trong động cơ không đồng bộ được thực hiện thông qua từ trường quay. Điều kiện cần thiết sự kích thích của từ trường quay là:
dịch chuyển không gian của trục cuộn dây stato;
sự dịch chuyển tạm thời của dòng điện trong cuộn dây stato.
Yêu cầu đầu tiên được thỏa mãn bằng cách bố trí thích hợp các cuộn dây từ hóa trên mạch từ của stato. Trục pha của cuộn dây được dịch chuyển trong không gian một góc 120°. Điều kiện thứ hai được đảm bảo bằng cách đưa hệ thống điện áp ba pha vào cuộn dây stato.
Khi động cơ được kết nối với mạng ba pha, một hệ thống dòng điện có cùng tần số và biên độ được lắp đặt trong cuộn dây stato, những thay đổi định kỳ tương đối với nhau xảy ra với độ trễ 1/3 chu kỳ.
Dòng điện pha cuộn dây tạo ra từ trường quay tương đối với stato có tần số ,vòng/phút gọi là tốc độ động cơ đồng bộ:

Ở đâu  - tần số dòng điện mạng, Hz,
- tần số dòng điện mạng, Hz,
р – số cặp cực của từ trường.
Ở tần số nguồn điện tiêu chuẩn  , tần số quay trường
, tần số quay trường
|
|
 , vòng/phút
, vòng/phútTrong khi quay, từ trường đi qua các dây dẫn rôto, tạo ra EMF vào chúng. Khi cuộn dây rôto đóng, EMF tạo ra dòng điện, sự tương tác của dòng điện này với từ trường quay sẽ tạo ra mômen điện từ quay. Tốc độ quay rôto ở chế độ động cơ của máy không đồng bộ luôn nhỏ hơn tốc độ quay trường, tức là. rôto “tụt hậu” từ trường quay. Chỉ trong điều kiện này, EMF mới được tạo ra trong dây dẫn rôto, dòng điện và mô-men xoắn được tạo ra. Hiện tượng rôto tụt hậu so với từ trường gọi là hiện tượng trượt. Mức độ trễ của rôto so với từ trường được đặc trưng bởi độ lớn của độ trượt tương đối:

trong đó n là tốc độ quay rôto, vòng/phút.
Đối với động cơ không đồng bộ, độ trượt có thể thay đổi từ 1 (khởi động) đến giá trị gần bằng 0 (không tải).
2 ) Khởi động động cơ không đồng bộ.
Khi khởi động động cơ phải đáp ứng các yêu cầu sau:
1. Giá trị nhỏ bắt đầu từ hiện tại;
2. Đủ mômen khởi động;
3. Tăng tốc độ mượt mà;
4. Sự đơn giản và hiệu quả về mặt chi phí khi khởi nghiệp.
Tùy thuộc vào thiết kế của rôto (ngắn mạch hoặc pha), công suất động cơ và tính chất của tải mà có thể áp dụng nhiều phương pháp khởi động khác nhau.
Đối với động cơ lồng sóc, sử dụng khởi động trực tiếp và khởi động giảm điện áp.
1. Bắt đầu trực tiếp. Trong trường hợp này, cuộn dây stato được nối trực tiếp vào mạng ở điện áp tối đa. Chỉ cho phép khởi động trực tiếp đối với động cơ không đồng bộ có rôto lồng sóc có công suất thấp và trung bình (lên đến 15-20 kW). Tuy nhiên, nếu công suất của mạng lưới cung cấp lớn thì phương pháp này có thể được mở rộng cho các động cơ có công suất cao hơn (lên đến khoảng 50 kW).
2.
Khởi động điện áp thấp
.
Dòng khởi động của động cơ tỷ lệ thuận với điện áp trên các pha của cuộn dây stato  , do đó điện áp giảm kèm theo sự giảm tương ứng của dòng khởi động. Tuy nhiên, phương pháp này làm giảm mômen khởi động ban đầu, tỉ lệ với bình phương điện áp ở các pha của cuộn dây stato. Do mô men khởi động giảm đáng kể nên phương pháp khởi động này chỉ được áp dụng khi trục có tải trọng thấp.
, do đó điện áp giảm kèm theo sự giảm tương ứng của dòng khởi động. Tuy nhiên, phương pháp này làm giảm mômen khởi động ban đầu, tỉ lệ với bình phương điện áp ở các pha của cuộn dây stato. Do mô men khởi động giảm đáng kể nên phương pháp khởi động này chỉ được áp dụng khi trục có tải trọng thấp.
Có nhiều cách để giảm điện áp tại thời điểm bắt đầu:
a) để khởi động dễ dàng động cơ không đồng bộ công suất trung bình, hoạt động bình thường khi các pha của cuộn dây stato được nối thành hình tam giác, hãy giảm điện áp ở các đầu của các pha này bằng cách chuyển chúng thành hình sao;
b) với bất kỳ kiểu đấu nối pha nào của cuộn dây stato, có thể giảm điện áp bằng cách sử dụng cuộn cảm (cuộn dây cảm ứng ba pha) nối nối tiếp với cuộn dây stato. Sẽ ít kinh tế hơn nếu giảm điện áp trên stato bằng cách mắc nối tiếp các điện trở, vì Đồng thời, chúng trở nên rất nóng và xảy ra tổn thất thêm năng lượng điện;
c) đối với động cơ công suất cao, nên giảm điện áp bằng máy biến áp tự ngẫu ba pha hạ áp. Phương pháp này tốt hơn phương pháp trước, nhưng đắt hơn nhiều. Sau khi rôto động cơ tăng tốc và dòng điện giảm xuống, toàn bộ điện áp nguồn sẽ được cấp vào cuộn dây stato.
Việc khởi động động cơ rôto dây quấn được thực hiện bằng cách kết nối một biến trở khởi động với mạch rôto. Biến trở khởi động làm giảm dòng khởi động ban đầu, đồng thời tăng mômen khởi động ban đầu, có thể đạt giá trị gần với mômen xoắn cực đại. Khi động cơ tăng tốc, biến trở khởi động được loại bỏ.
3) Điều chỉnh tốc độ quay và đảo chiều động cơ không đồng bộ.
Sự điều chỉnh là sự thay đổi bắt buộc về tốc độ quay với tải trọng không đổi trên trục. Nhược điểm của động cơ không đồng bộ là khả năng điều khiển kém. Nhưng vẫn còn một số cơ hội pháp lý.
Từ công thức trượt, chúng ta có thể thu được biểu thức cho tốc độ rôto của động cơ không đồng bộ:
Từ đẳng thức này, tốc độ quay có thể được thay đổi theo những cách sau: bằng cách thay đổi tần số dòng điện stato , số cặp cực p và độ trượt s. Tốc độ rôto có thể được điều chỉnh bằng cách thay đổi điện áp cung cấp . Hãy xem xét các phương pháp này.
Điều chỉnh bằng cách thay đổi tần số dòng điện stato
.
Việc điều chỉnh tần số của động cơ không đồng bộ là hứa hẹn nhất do có sẵn bộ biến tần thyristor ba pha đơn giản và đáng tin cậy, được kết nối giữa mạng công nghiệp và động cơ không đồng bộ. Khi điều chỉnh tần số tốc độ động cơ có thể được thay đổi êm ái sao cho giá trị cực đại của nó cao gấp hàng chục hoặc hàng trăm lần so với tốc độ tối thiểu.
Điều chỉnh bằng cách thay đổi số cặp cực p . Việc chuyển đổi số cặp cực của động cơ không đồng bộ nhiều tốc độ giúp điều khiển từng bước tốc độ rôto và tiết kiệm. Nó được sử dụng trong các máy có thiết kế đặc biệt của cuộn dây stato, cho phép chuyển cuộn dây của nó sang một số cặp cực khác nhau, cũng như khi một số cuộn dây chuyển mạch luân phiên được đặt trong các rãnh của mạch từ stato, được chế tạo trên số khác nhau các cặp cực, ví dụ p = 1 và p = 2.
Điều chỉnh bằng cách thay đổi điện áp cung cấp
.
Việc giảm điện áp làm giảm tốc độ rôto. Giảm căng thẳng có thể bao gồm các biến trở, máy biến áp tự ngẫu hoặc cuộn cảm có thể điều chỉnh được trong mạch stato. Phương pháp này chỉ được sử dụng cho động cơ công suất thấp, vì khi điện áp giảm, mô-men xoắn cực đại của động cơ tỷ lệ với bình phương điện áp sẽ giảm. Việc giảm mô-men xoắn cực đại làm giảm biên độ ổn định của động cơ. Ngoài ra, phạm vi điều khiển tốc độ quay tương đối nhỏ.
Các phương pháp điều khiển liệt kê ở trên được sử dụng cho động cơ không đồng bộ có rôto lồng sóc.
Đối với động cơ có rôto dây quấn, tốc độ quay được điều chỉnh bằng cách thay đổi độ trượt. Để làm được điều này, một bộ biến trở điều chỉnh được lắp vào cuộn dây rôto. Khi điện trở của biến trở điều chỉnh tăng thì độ trượt tăng và tốc độ quay giảm.
Phương pháp này mang lại sự thay đổi mượt mà về tốc độ quay.
Việc thay đổi chiều quay của rôto gọi là đảo chiều. Để đảo chiều, bạn cần hoán đổi hai dây ở đầu cuộn dây stato của động cơ.