ตามปริมาณแรงบิด มอเตอร์แบบอะซิงโครนัสการเปลี่ยนเฟสระหว่างกระแส I 2 และ e มีอิทธิพลอย่างมาก d.s. โรเตอร์ E 2S
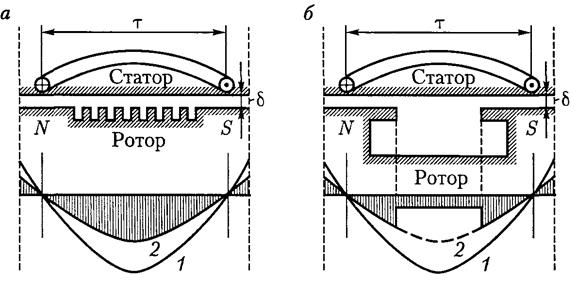
ลองพิจารณากรณีที่ค่าความเหนี่ยวนำของขดลวดโรเตอร์มีขนาดเล็ก ดังนั้นจึงอาจละเลยการเปลี่ยนเฟสได้ (รูปที่ 223, a)
สนามแม่เหล็กที่กำลังหมุนของสเตเตอร์จะถูกแทนที่ด้วยสนามของขั้ว N และ S ซึ่งหมุนตามทิศทางตามเข็มนาฬิกา การใช้กฎ มือขวากำหนดทิศทางของ e d.s. และกระแสในขดลวดโรเตอร์ กระแสของโรเตอร์ซึ่งทำปฏิกิริยากับสนามแม่เหล็กที่กำลังหมุนทำให้เกิดแรงบิด ทิศทางของแรงที่กระทำต่อตัวนำที่มีกระแสไฟฟ้าจะถูกกำหนดโดยกฎมือซ้าย ดังที่เห็นได้จากภาพวาด โรเตอร์ภายใต้อิทธิพลของแรงจะหมุนไปในทิศทางเดียวกันกับสนามที่กำลังหมุนอยู่ เช่น ตามเข็มนาฬิกา
ลองพิจารณากรณีที่สองเมื่อค่าความเหนี่ยวนำของขดลวดโรเตอร์มีขนาดใหญ่ ในกรณีนี้ การเปลี่ยนเฟสระหว่างกระแสโรเตอร์ I 2 และ e d.s. โรเตอร์ E 2S จะมีขนาดใหญ่เช่นกัน ในรูป 223, b สนามแม่เหล็กของสเตเตอร์ของมอเตอร์อะซิงโครนัสยังคงแสดงอยู่ในรูปของขั้ว N และ S ที่หมุนตามเข็มนาฬิกา d.s. ยังคงเหมือนเดิมตามในรูป 223, a แต่เนื่องจากเฟสแล็กของกระแสแกน สนามแม่เหล็กโรเตอร์จะไม่ตรงกับเส้นสนามที่เป็นกลางของสเตเตอร์อีกต่อไป แต่จะเลื่อนไปมุมหนึ่งตามการหมุนของสนามแม่เหล็ก สิ่งนี้จะนำไปสู่ความจริงที่ว่า ตัวนำบางตัวจะสร้างแรงบิดสวนทางพร้อมกับการก่อตัวของแรงบิดในทิศทางเดียว
จากนี้จะเห็นได้ว่าแรงบิดรวมของมอเตอร์ที่มีการเปลี่ยนเฟสระหว่างกระแสและอี d.s. โรเตอร์มีขนาดเล็กกว่ากรณีที่ I 2 และ E 2S อยู่ในเฟส สามารถพิสูจน์ได้ว่าแรงบิดของมอเตอร์แบบอะซิงโครนัสถูกกำหนดโดยส่วนประกอบที่ใช้งานของกระแสโรเตอร์เท่านั้น เช่น กระแส I 2 cos และสามารถคำนวณได้โดยใช้สูตร:
Ф m - ฟลักซ์แม่เหล็กของสเตเตอร์ (และมีค่าประมาณเท่ากับฟลักซ์แม่เหล็กที่เกิดขึ้นของมอเตอร์แบบอะซิงโครนัส)
มุมกะเฟสระหว่างอี d.s. และกระแสเฟสที่คดเคี้ยว
C คือสัมประสิทธิ์คงที่
หลังจากการทดแทน:
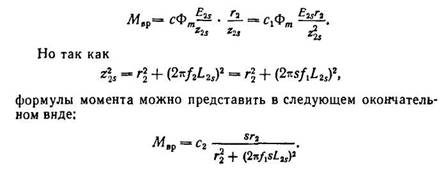
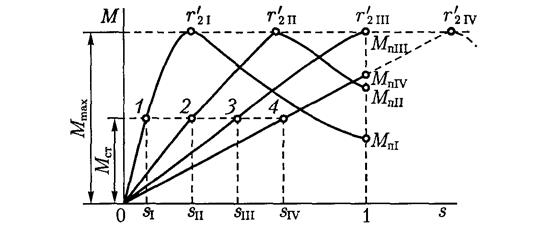
จากการแสดงออกครั้งสุดท้ายจะเห็นได้ว่าแรงบิดของมอเตอร์อะซิงโครนัสขึ้นอยู่กับสลิป
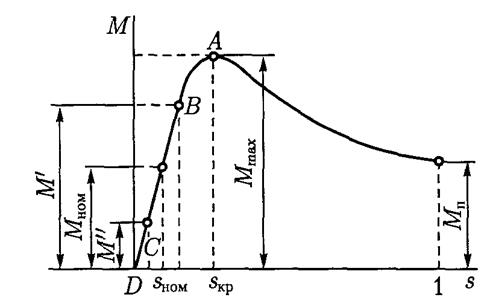
ในรูป 224 แสดงเส้นโค้ง A ของการขึ้นต่อแรงบิดของเครื่องยนต์กับสลิป จากเส้นโค้งจะเห็นได้ชัดเจนว่า ณ ขณะสตาร์ท เมื่อ s=l และ n = 0 แรงบิดของเครื่องยนต์มีน้อย สิ่งนี้อธิบายได้จากข้อเท็จจริงที่ว่าในขณะที่สตาร์ท ความถี่ของกระแสในขดลวดโรเตอร์จะสูงที่สุดและปฏิกิริยาอินดักทีฟของขดลวดจะสูง เป็นผลให้ cos มีค่าน้อย (โดย
|
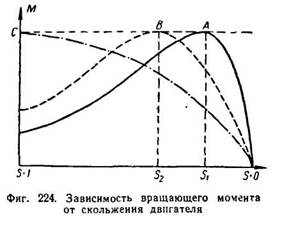
แถว 0.1-0.2) ดังนั้นแม้จะมีขนาดที่ใหญ่โตก็ตาม เริ่มต้นปัจจุบันแรงบิดสตาร์ทจะน้อย
ที่สลิป S1 บ้าง แรงบิดของเครื่องยนต์จะมีค่าสูงสุด เมื่อสลิปลดลงอีกหรืออีกนัยหนึ่งเมื่อความเร็วการหมุนของเครื่องยนต์เพิ่มขึ้นอีก แรงบิดของมันจะลดลงอย่างรวดเร็ว
เมื่อเลื่อน s = 0 แรงบิดในการหมุนของเครื่องยนต์จะเป็นศูนย์เช่นกัน
ควรสังเกตว่ามอเตอร์แบบอะซิงโครนัสไม่สามารถมีสลิปเป็นศูนย์ได้ สิ่งนี้จะเกิดขึ้นได้ก็ต่อเมื่อโรเตอร์ได้รับแรงบิดภายนอกตามทิศทางการหมุนของสนามสเตเตอร์
แรงบิดสตาร์ทสามารถเพิ่มขึ้นได้หากในขณะที่สตาร์ท การเปลี่ยนเฟสระหว่างกระแสและ e ลดลง d.s. โรเตอร์ จากสูตร
จะเห็นได้ว่าหากความต้านทานแบบเหนี่ยวนำคงที่ของขดลวดโรเตอร์ความต้านทานแบบแอคทีฟจะเพิ่มขึ้นมุมนั้นก็จะลดลงซึ่งจะนำไปสู่ความจริงที่ว่าแรงบิดของเครื่องยนต์จะมากขึ้น ใช้ในทางปฏิบัติเพื่อเพิ่มแรงบิดสตาร์ทของเครื่องยนต์ ในขณะที่สตาร์ท ความต้านทานแบบแอคทีฟ (สตาร์ทลิโน่) จะถูกนำเข้าสู่วงจรโรเตอร์ ซึ่งจะถูกลบออกทันทีที่เครื่องยนต์เพิ่มความเร็ว
แรงบิดเริ่มต้นที่เพิ่มขึ้นส่งผลให้ได้แรงบิดสูงสุดของเครื่องยนต์พร้อมกับสลิปที่มากขึ้น (จุด S 2 ของเส้นโค้ง B ในรูปที่ 224) ด้วยการเพิ่มความต้านทานแบบแอกทีฟของวงจรโรเตอร์เมื่อสตาร์ทเครื่อง จึงสามารถมั่นใจได้ว่าแรงบิดสูงสุดจะอยู่ในช่วงเวลาสตาร์ทเครื่อง (s = 1 เส้นโค้ง C)
แรงบิดของมอเตอร์อะซิงโครนัสนั้นแปรผันตามกำลังสองของแรงดันไฟฟ้า ดังนั้นแม้แต่แรงดันไฟฟ้าที่ลดลงเล็กน้อยก็มาพร้อมกับแรงบิดที่ลดลงอย่างรวดเร็ว
กำลัง P 1 ที่จ่ายให้กับขดลวดสเตเตอร์ของมอเตอร์แบบอะซิงโครนัสเท่ากับ:
![]()
โดยที่ m 1 คือจำนวนเฟส
สเตเตอร์ของมอเตอร์มีการสูญเสียพลังงานดังต่อไปนี้:
1) ในสเตเตอร์ที่คดเคี้ยว R es =ม. 1 ฉัน 1 2 ร 1 ;
2) ในเหล็กสเตเตอร์จะมีฮิสเทรีซิสและกระแสไหลวน Р C .
พลังงานที่จ่ายให้กับโรเตอร์คือพลังของสนามแม่เหล็กที่กำลังหมุนหรือที่เรียกว่าพลังงานแม่เหล็กไฟฟ้า P eM
พลังงานแม่เหล็กไฟฟ้าเท่ากับความแตกต่างระหว่างกำลังที่จ่ายให้กับมอเตอร์และการสูญเสียในสเตเตอร์ของมอเตอร์ กล่าวคือ
|
ความแตกต่างระหว่าง R eM และเป็นตัวแทน การสูญเสียทางไฟฟ้าในขดลวดโรเตอร์ Р eP ถ้าเราละเลยการสูญเสียในเหล็กโรเตอร์เนื่องจากไม่มีนัยสำคัญ (ความถี่ของการกลับตัวของแม่เหล็กโรเตอร์มักจะน้อยมาก):
ดังนั้นการสูญเสียในขดลวดของโรเตอร์จึงแปรผันตามสลิปของโรเตอร์
ถ้าจาก พลังกลพัฒนาโดยโรเตอร์ ลบการสูญเสียทางกล P mx ที่เกิดจากแรงเสียดทานในแบริ่งโรเตอร์ แรงเสียดทานกับอากาศ ฯลฯ รวมถึงการสูญเสียเพิ่มเติม P D ที่เกิดขึ้นภายใต้ภาระและเกิดจากสนามหลงทางของโรเตอร์ และการสูญเสียที่เกิดจาก: การเต้นเป็นจังหวะ ของสนามแม่เหล็กในฟันสเตเตอร์และโรเตอร์ก็จะยังคงอยู่ พลังที่มีประโยชน์บนเพลามอเตอร์ซึ่งเราแสดงด้วย P 2
ประสิทธิภาพของมอเตอร์อะซิงโครนัสสามารถกำหนดได้จากสูตร:

จากนิพจน์สุดท้ายจะเห็นได้ว่าแรงบิดในการหมุนของมอเตอร์แบบอะซิงโครนัสเป็นสัดส่วนกับผลคูณของค่าของฟลักซ์แม่เหล็กที่กำลังหมุน กระแสของโรเตอร์ และโคไซน์ของมุมระหว่าง e d.s. โรเตอร์และกระแสของมัน

จากวงจรสมมูลของมอเตอร์อะซิงโครนัส จะได้ค่าของกระแสโรเตอร์ที่ลดลง ซึ่งเรานำเสนอโดยไม่มีการพิสูจน์
แรงบิดที่พัฒนาโดยมอเตอร์จะเท่ากับกำลังแม่เหล็กไฟฟ้าหารด้วยความเร็วในการหมุนแบบซิงโครนัสของไดรฟ์ไฟฟ้า
M = P อีเอ็ม /ω 0
พลังงานแม่เหล็กไฟฟ้าคือพลังงานที่ส่งผ่านช่องว่างอากาศจากสเตเตอร์ไปยังโรเตอร์ และมีค่าเท่ากับการสูญเสียในโรเตอร์ซึ่งกำหนดโดยสูตร:
P em = ม ฉัน 2 2 (r 2 '/s)
ม. – จำนวนเฟส
M = M em = (Pm/ω 0) (I 2 ') 2 (r 2 '/s)
คุณลักษณะทางเครื่องกลไฟฟ้าของมอเตอร์อะซิงโครนัสคือการขึ้นอยู่กับ I2’ บนสลิป แต่เนื่องจากเครื่องจักรแบบอะซิงโครนัสทำงานเป็นมอเตอร์ไฟฟ้าเท่านั้น ลักษณะสำคัญคือลักษณะทางกล
M = Me m = (Pm/ω 0) (I 2 ') 2 (r 2 '/s) - การแสดงลักษณะทางกลอย่างง่าย
เมื่อแทนค่าปัจจุบันลงในนิพจน์นี้ เราจะได้: M = / [ω 0 [(r 1 + r 2 '/s) 2 + (x 1 + x 2 ') 2 ]]
แทนที่จะเป็น ω 0 จำเป็นต้องเปลี่ยนความเร็วเชิงกลแทน ซึ่งส่งผลให้จำนวนขั้วคู่ลดลง
M = / [ω 0 [(r 1 + r 2 '/s) 2 + (x 1 + x 2 ') 2 ]] คือสมการสำหรับคุณลักษณะทางกลของมอเตอร์แบบอะซิงโครนัส
เมื่อมอเตอร์อะซิงโครนัสเข้าสู่โหมดเครื่องกำเนิดไฟฟ้า ความเร็วในการหมุน ω > ω 0 และสลิปจะกลายเป็นลบ (s เมื่อสลิปเปลี่ยนจาก 0 ถึง +∞ โหมดนี้เรียกว่า "โหมดเบรกแม่เหล็กไฟฟ้า"
การระบุค่าสลิปจาก o ถึง +∞ เราได้รับคุณลักษณะ:
ลักษณะทางกลที่สมบูรณ์ของมอเตอร์อะซิงโครนัส
ดังที่เห็นได้จากลักษณะทางกล มันมีปลายสุดสองอัน: อันหนึ่งอยู่ในช่วงเวลาของการเปลี่ยนแปลงสลิปในพื้นที่ตั้งแต่ 0 ถึง +∞ และอีกอันอยู่ในช่วงเวลาตั้งแต่ 0 ถึง -∞ ดีเอ็ม/ดีเอส=0
M max = / ] + หมายถึงโหมดมอเตอร์ – หมายถึงโหมดตัวสร้าง
M max =M cr M cr – ช่วงเวลาวิกฤต
สลิปที่ช่วงเวลาถึงจุดสูงสุดเรียกว่าสลิปวิกฤตและถูกกำหนดโดยสูตร: s cr = ±
สลิปวิกฤติมีความหมายเหมือนกันทั้งในโหมดมอเตอร์และเจเนอเรเตอร์
ค่า Mcr สามารถหาได้โดยการแทนที่ค่าของสลิปวิกฤติลงในสูตรแรงบิด
แรงบิดเลื่อนเท่ากับ 1 เรียกว่าแรงบิดสตาร์ท การแสดงออกของแรงบิดเริ่มต้นสามารถรับได้โดยการแทนที่ 1 ลงในสูตร:
M พี = / [ω 0 [(r 1 + r 2 ') 2 + (x 1 + x 2 ') 2 ]]
เนื่องจากตัวส่วนในสูตรโมเมนต์สูงสุดนั้นมีลำดับความสำคัญมากกว่า U f หลายลำดับ จึงเป็นที่ยอมรับกันโดยทั่วไปว่า M cr ≡U f 2
การสลิปวิกฤตขึ้นอยู่กับค่าความต้านทานเชิงแอ็คทีฟของขดลวดโรเตอร์ R 2 ' แรงบิดเริ่มต้นดังที่เห็นได้จากสูตรนั้นขึ้นอยู่กับความต้านทานเชิงแอคทีฟของโรเตอร์ r 2 ' คุณสมบัติของแรงบิดเริ่มต้นนี้ใช้ในมอเตอร์แบบอะซิงโครนัสกับโรเตอร์แบบพันแผล ซึ่งแรงบิดสตาร์ทจะเพิ่มขึ้นโดยการแนะนำความต้านทานแบบแอกทีฟเข้าไปในวงจรโรเตอร์
7. หม้อแปลงไฟฟ้าเดินเบา
โหมด ความเร็วรอบเดินเบาหม้อแปลงไฟฟ้าเป็นโหมดการทำงานเมื่อขดลวดเส้นหนึ่งของหม้อแปลงไฟฟ้าได้รับพลังงานจากแหล่งที่มีแรงดันไฟฟ้ากระแสสลับและมีวงจรเปิดของขดลวดอีกเส้นหนึ่ง หม้อแปลงจริงสามารถมีโหมดการทำงานนี้ได้เมื่อเชื่อมต่อกับเครือข่ายและยังไม่ได้เปิดโหลดที่ขับเคลื่อนจากขดลวดทุติยภูมิ กระแส I 0 ผ่านขดลวดปฐมภูมิของหม้อแปลงไฟฟ้าในขณะเดียวกันก็ไม่มีกระแสไฟฟ้าในขดลวดทุติยภูมิเนื่องจากวงจรเปิดอยู่ ปัจจุบัน ผม 0 ผ่านขดลวดปฐมภูมิสร้างฟลูมที่แปรผันแบบไซน์ 0 ในวงจรแม่เหล็กซึ่งเนื่องจากการสูญเสียแม่เหล็กจึงล่าช้าในเฟสกับกระแสโดยมุมการสูญเสียδ 
![]()
การพึ่งพาการแสดงกราฟิกของแรงบิดแม่เหล็กไฟฟ้าบนสลิปเรียกว่า ลักษณะทางกลมอเตอร์แบบอะซิงโครนัส (รูปที่ 3.3)
ข้าว. 3.3. ลักษณะทางกลของมอเตอร์อะซิงโครนัส
สามารถใช้สูตรง่าย ๆ ในการคำนวณแรงบิดแม่เหล็กไฟฟ้าของมอเตอร์อะซิงโครนัส (สูตร Kloss) เพื่อสร้างคุณลักษณะทางกล
ในกรณีนี้ สลิปวิกฤตจะถูกกำหนดโดยสูตร
![]()
โดยที่ λ m = M max / M nom - ความจุเกินพิกัดของเครื่องยนต์
เมื่อคำนวณลักษณะทางกลควรคำนึงว่าเมื่อค่าสลิปเกินค่าวิกฤตความแม่นยำของการคำนวณจะลดลงอย่างรวดเร็ว สิ่งนี้อธิบายได้จากการเปลี่ยนแปลงพารามิเตอร์ของวงจรสมมูลของมอเตอร์แบบอะซิงโครนัสซึ่งเกิดจากการอิ่มตัวของแม่เหล็กของสเตเตอร์และฟันโรเตอร์และการเพิ่มความถี่ของกระแสในขดลวดโรเตอร์
รูปร่างของลักษณะทางกลของมอเตอร์แบบอะซิงโครนัสส่วนใหญ่ขึ้นอยู่กับแรงดันไฟฟ้าที่ใช้กับขดลวดสเตเตอร์ คุณ รูปที่ 1 (รูปที่ 3.4) และความต้านทานเชิงแอ็กทีฟของขดลวดโรเตอร์ ร" 2 (รูปที่ 3.5)
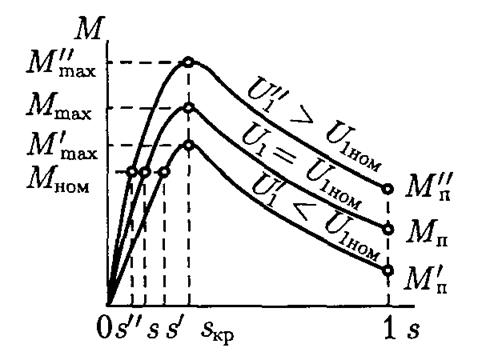
ข้าว. 3.4. ผลกระทบของแรงดันไฟฟ้า คุณ 1 ลักษณะทางกลของมอเตอร์แบบอะซิงโครนัส
ข้อมูลที่ระบุในแค็ตตาล็อกสำหรับมอเตอร์อะซิงโครนัสมักจะไม่มีข้อมูลเกี่ยวกับพารามิเตอร์ของวงจรสมมูล ซึ่งทำให้ยากต่อการใช้สูตรในการคำนวณแรงบิดแม่เหล็กไฟฟ้า ดังนั้นในการคำนวณแรงบิดแม่เหล็กไฟฟ้าจึงมักใช้สูตรนี้
ข้าว. 3.5. ผลกระทบของความต้านทาน ร" 2 ลักษณะทางกลของมอเตอร์แบบอะซิงโครนัส
คุณสมบัติการทำงานของมอเตอร์อะซิงโครนัสถูกกำหนดโดยลักษณะการทำงาน: ขึ้นอยู่กับความเร็วในการหมุน n 2 แรงบิดบนเพลา ม 2 ประสิทธิภาพและตัวประกอบกำลัง เพราะφ 1 จากน้ำหนักบรรทุกของเครื่องยนต์ ร 2 .
เมื่อคำนวณพารามิเตอร์เพื่อกำหนดคุณลักษณะด้านประสิทธิภาพ มอเตอร์ซิงโครนัสพวกเขาใช้วิธีการแบบกราฟิกซึ่งขึ้นอยู่กับการสร้างแผนภูมิวงกลมหรือวิธีการวิเคราะห์
พื้นฐานสำหรับการดำเนินการตามวิธีคำนวณประสิทธิภาพใดๆ คือผลลัพธ์ของการทดลองที่ไม่มีโหลดและการลัดวงจร หากเครื่องยนต์ได้รับการออกแบบ ข้อมูลนี้จะได้รับระหว่างการคำนวณ
เมื่อคำนวณความต้านทานของตัวต้านทาน รเพิ่ม ใช้ในวงจรสเตเตอร์หรือวงจรโรเตอร์แบบพันรอบเพื่อจำกัดกระแสสตาร์ทหรือควบคุมความเร็วการหมุน ใช้หลักการ: สำหรับมอเตอร์อะซิงโครนัสเฉพาะนี้ ให้สลิป สแปรผันตามความต้านทานเชิงแอคทีฟของวงจรโรเตอร์ของมอเตอร์นี้ ตามนี้ความเท่าเทียมกันเป็นจริง
(อาร์ 2 + อาร์ต่อ) /วิ= ร 2 /วิชื่อ,
ที่ไหน ร 2- ความต้านทานแบบแอคทีฟของขดลวดโรเตอร์ที่อุณหภูมิใช้งาน ส-เลื่อนเมื่อมีการนำตัวต้านทานเข้าไปในวงจรโรเตอร์ด้วยความต้านทาน รต่อ
จากนิพจน์นี้เราได้สูตรสำหรับคำนวณความต้านทานเชิงแอคทีฟของตัวต้านทานเพิ่มเติม g ถึง6 ซึ่งจำเป็นเพื่อให้ได้สลิปที่เพิ่มขึ้นที่กำหนด สที่โหลดที่กำหนด (ระบุ):
รต่อ = ร 2 (หมายเลข/s - 1)
มีสองวิธีในการคำนวณลิโน่เริ่มต้น: แบบกราฟิกและการวิเคราะห์
วิธีการแบบกราฟิกแม่นยำยิ่งขึ้น แต่ต้องมีการสร้างลักษณะทางกลตามธรรมชาติและแผนภาพสตาร์ทของเครื่องยนต์ซึ่งเกี่ยวข้องกับงานกราฟิกจำนวนมาก
วิธีการวิเคราะห์การคำนวณรีโอสแตตเริ่มต้นนั้นง่ายกว่า แต่มีความแม่นยำน้อยกว่า นี่เป็นเพราะความจริงที่ว่าวิธีการนี้ตั้งอยู่บนสมมติฐานที่ว่าส่วนการทำงานของลักษณะทางกลตามธรรมชาติของมอเตอร์แบบอะซิงโครนัสนั้นเป็นเส้นตรง แต่เมื่อการเลื่อนเข้าใกล้วิกฤต ข้อสันนิษฐานนี้จะทำให้เกิดข้อผิดพลาดที่เห็นได้ชัดเจน ซึ่งจะยิ่งสำคัญมากขึ้นเมื่อใกล้ถึงช่วงเวลาเริ่มต้นแรก ม 1 ถึงแรงบิดสูงสุด ม ม๊ะ ดังนั้นวิธีคำนวณเชิงวิเคราะห์จึงใช้ได้กับค่าแรงบิดเริ่มต้นเริ่มต้นเท่านั้น ม 1 < 0.7· ม ม๊ะ .
ความต้านทานของตัวต้านทานที่ระยะลิโน่เริ่มต้น:
ที่สาม รต่อ 3 = ร 2 (แลมบ์ดา - 1);
ที่สอง รต่อ 2 = รต่อ 3 แลมเอ็ม;
อันดับแรก รต่อ 1 = รต่อ2 แลมเอ็ม,
ที่ไหน ร 2 - ความต้านทานแบบแอคทีฟของการพันเฟสของโรเตอร์ของมอเตอร์แบบอะซิงโครนัส
ที่ไหน อี 2 และ ฉัน 2nom - ข้อมูลแค็ตตาล็อกสำหรับขนาดมอเตอร์ที่เลือก
ความต้านทานของลิโน่เริ่มต้นในระยะ:
R PR1 ตัวแรก = รต่อ 1 + รต่อ2+ รต่อ 3 ;
วินาที R PR2 = รต่อ2+ รต่อ 3
ที่สาม R PR2 = รต่อ 3 .
เพื่อจำกัดกระแสสตาร์ทของมอเตอร์อะซิงโครนัสด้วย โรเตอร์กรงกระรอกวงจรพิเศษสำหรับการรวมนั้นใช้กับองค์ประกอบที่จำกัดกระแสเริ่มต้น วิธีการทั้งหมดนี้ขึ้นอยู่กับการลดแรงดันไฟฟ้าที่จ่ายให้กับขดลวดสเตเตอร์ การใช้งานส่วนใหญ่วงจรรับที่มีการรวมตัวต้านทานหรือโช้คไว้ในสายไฟเชิงเส้นของสเตเตอร์ (ดูรูปที่ 3.14 ข).การคำนวณความต้านทานที่ต้องการขององค์ประกอบเหล่านี้สำหรับการลดลงที่กำหนดในกระแสเริ่มต้น a ซึ่งสัมพันธ์กับค่าธรรมชาตินั้นดำเนินการโดยใช้สูตร:
สำหรับตัวต้านทานที่มีความต้านทานแบบแอคทีฟ
รน= 
สำหรับโช้ก
เอ็กซ์ล= 
ความต้านทานมอเตอร์ในโหมดลัดวงจร ซี เค, โอห์ม,
ซีเค =คุณ 1 /ฉัน n
ที่นี่ เอ็กซ์ถึงและ ร k - ส่วนประกอบอุปนัยและแอคทีฟของความต้านทานนี้
รเค = ซี k cosφ k ; xเค =
ลดแรงบิดสตาร์ทเทียมเมื่อเปิดเครื่อง ร หรือ ล จะเป็น
α ม = α 2 ฉัน
ตารางที่ 3.1
ดังนั้นหากให้ค่าα m ซึ่งกำหนดค่าของแรงบิดเริ่มต้นเทียม M" p จากนั้นให้คำนวณค่าที่สอดคล้องกัน ร พีหรือ x ลคุณสามารถใช้สูตรข้างต้นได้โดยการแทนที่ในสูตรเหล่านั้นแทน α 2 ฉัน, ค่า α ม.
ความต้านทานไฟฟ้าขดลวดมอเตอร์ที่อยู่ในแค็ตตาล็อกมักจะสอดคล้องกับอุณหภูมิ +20 °C แต่เมื่อคำนวณคุณสมบัติและพารามิเตอร์ของมอเตอร์จะต้องนำความต้านทานของขดลวดไปสู่อุณหภูมิในการทำงาน ตามมาตรฐานปัจจุบัน อุณหภูมิในการทำงานจะขึ้นอยู่กับระดับการทนความร้อน ฉนวนไฟฟ้าใช้ในเครื่องยนต์: ด้วยระดับการทนความร้อน B อุณหภูมิในการทำงานคือ 75 °C และระดับการทนความร้อน F และ H - 115 °C การแปลงความต้านทานของขดลวดเป็นอุณหภูมิใช้งานทำได้โดยการคูณความต้านทานของขดลวดที่อุณหภูมิ 20 °C ด้วยสัมประสิทธิ์ความร้อน k ที:
ร= ร 20,000 ที
ค่าสัมประสิทธิ์นี้ขึ้นอยู่กับวัตถุประสงค์ของเครื่องยนต์และขนาด (ความสูงของแกนหมุน) (ตารางที่ 3.1)
เครื่องซิงโครนัส
แนวคิดพื้นฐาน
มีลักษณะเฉพาะเครื่องซิงโครนัสคือการเชื่อมต่อที่แน่นแฟ้นระหว่างความเร็วของโรเตอร์ n 1 และความถี่ เครื่องปรับอากาศในขดลวดสเตเตอร์ ฉ 1:
n 1 = ฉ 1 60/ ร.
กล่าวอีกนัยหนึ่งสนามแม่เหล็กที่กำลังหมุนของสเตเตอร์และโรเตอร์ของเครื่องซิงโครนัสจะหมุน พร้อมกันนั่นคือด้วยความถี่เดียวกัน
ตามการออกแบบ เครื่องจักรซิงโครนัสแบ่งออกเป็นแบบเน้นเสาและแบบไม่เด่น ในเครื่องซิงโครนัสโพลเด่น โรเตอร์มีโพลเด่นที่คอยล์ขดลวดสนามขับเคลื่อนด้วย ดี.ซี- คุณลักษณะเฉพาะของเครื่องดังกล่าวคือความแตกต่างของความต้านทานแม่เหล็กตามแกนตามยาว (ตามแกนของเสา) และตามแกนตามขวาง (ตามแกนที่ผ่านในปริภูมิระหว่างขั้ว) ความต้านทานแม่เหล็กต่อฟลักซ์สเตเตอร์ตามแนวแกนตามยาว ววความต้านทานแม่เหล็กน้อยมากต่อฟลักซ์สเตเตอร์ตามแกนขวาง คิวคิวในเครื่องซิงโครนัสที่ไม่มีขั้วเด่น ความต้านทานแม่เหล็กตามแกนตามยาวและตามขวางจะเท่ากัน เนื่องจากช่องว่างอากาศของเครื่องเหล่านี้รอบเส้นรอบวงของสเตเตอร์จะเท่ากัน
โดยหลักการแล้วการออกแบบสเตเตอร์ของเครื่องซิงโครนัสนั้นไม่แตกต่างจากสเตเตอร์ของเครื่องอะซิงโครนัส ในขดลวดสเตเตอร์ในระหว่างการทำงานของเครื่อง EMF จะถูกเหนี่ยวนำและกระแสไหลซึ่งสร้างแรงแม่เหล็ก (MF) ซึ่งค่าสูงสุดคือ
เอฟ 1 =0,45ม 1 ฉัน 1 ว 1 พันรอบ 1 / ร
MMF นี้จะสร้างสนามแม่เหล็กที่กำลังหมุนและอยู่ในช่องว่างอากาศ δ เครื่องจะสร้างการเหนี่ยวนำแม่เหล็ก โดยกราฟการกระจายซึ่งภายในแต่ละส่วนของขั้ว t ขึ้นอยู่กับการออกแบบของโรเตอร์ (รูปที่ 4.1)
สำหรับเครื่องซิงโครนัสขั้วเด่น สมการแรงดันไฟฟ้าใช้ได้:
Ú 1 =Ė 0 + Ė 1 วัน + Ė 1 คิว + Ė ซิ1 – İ 1 ร 1
ที่ไหน Ė 0 - EMF หลักของเครื่องซิงโครนัสซึ่งแปรผันตามฟลักซ์แม่เหล็กหลักของเครื่องซิงโครนัส เอฟ 0 ; Ė 1 d - EMF ของปฏิกิริยากระดองของเครื่องซิงโครนัสตามแกนตามยาวซึ่งเป็นสัดส่วนกับ MMF ของปฏิกิริยากระดองตามแกนตามยาว เอฟ 1วัน; Ė σ1 - EMF ของปฏิกิริยากระดองตามแกนขวาง, สัดส่วนกับ MMF ของปฏิกิริยากระดองตามแกนขวาง เอฟ 1 คิว ; Ė σ1 - แรงเคลื่อนไฟฟ้ารั่วเนื่องจากมีฟลักซ์การรั่วไหลของแม่เหล็ก เอฟ 0 ขนาดของ EMF นี้เป็นสัดส่วนกับความต้านทานการรั่วไหลแบบเหนี่ยวนำของขดลวดสเตเตอร์ เอ็กซ์ 1
Ė ซิ1 = เจİ 1 ร
İ 1 ร 1 - แรงดันไฟฟ้าตกที่แอคทีฟในขดลวดสเตเตอร์ โดยปกติแล้วค่านี้จะถูกละเลยเมื่อแก้ไขปัญหาเนื่องจากมีค่าน้อย
ข้าว. 4.1. กราฟการกระจายตัวเหนี่ยวนำแม่เหล็กตามแนวแกนตามขวาง
เสาที่ไม่เด่น ( ก) และเสาเด่น ( ข) เครื่องซิงโครนัส:
1 - กำหนดการ MDS; 2 - กราฟฟลักซ์แม่เหล็ก
สำหรับเครื่องซิงโครนัสที่ไม่เน้นขั้ว สมการแรงดันไฟฟ้าจะมีรูปแบบ
Ú 1 =Ė 0 + Ė ค – İ 1 ร 1
ที่นี่
Ė ค = Ė 1 + Ė ซิ1
ที่ไหน Ė 1 - ปฏิกิริยา EMF ของกระดองของเครื่องซิงโครนัสที่ไม่เน้นขั้ว สมการความเครียดที่พิจารณาข้างต้นสอดคล้องกับไดอะแกรมเวกเตอร์ความเครียด จะต้องสร้างไดอะแกรมเหล่านี้เพื่อกำหนดแรงเคลื่อนไฟฟ้าหลักของเครื่องจักร อี 0 หรือแรงดันไฟฟ้าของขดลวดสเตเตอร์ คุณ 1. ควรระลึกไว้เสมอว่าสมการแรงดันไฟฟ้าและไดอะแกรมเวกเตอร์ที่เกี่ยวข้องไม่ได้คำนึงถึงความอิ่มตัวของแม่เหล็กของวงจรแม่เหล็กของเครื่องซิงโครนัสซึ่งดังที่ทราบกันดีว่าส่งผลต่อค่าของปฏิกิริยารีแอคแตนซ์แบบเหนี่ยวนำ ลด. การคำนึงถึงความอิ่มตัวนี้เป็นงานที่ยากดังนั้นเมื่อคำนวณ EMF และแรงดันไฟฟ้าของเครื่องซิงโครนัสจึงมักใช้ แผนภาพการปฏิบัติ EMF ซึ่งคำนึงถึงสถานะความอิ่มตัวของระบบแม่เหล็กที่เกิดจากการกระทำของปฏิกิริยากระดองเมื่อโหลดเครื่องซิงโครนัส เมื่อสร้างแผนภาพ EMF ที่ใช้งานได้จริง แรงแม่เหล็กของปฏิกิริยากระดองจะไม่ถูกสลายเป็นส่วนประกอบตามยาวและตามขวาง ดังนั้น แผนภาพนี้จึงสามารถใช้ได้ทั้งในการคำนวณเครื่องจักรแบบมีขั้วซาเลียนและที่ไม่เน้นขั้ว
เมื่อแก้ไขปัญหาที่เกี่ยวข้องกับเครื่องกำเนิดไฟฟ้าแบบซิงโครนัสที่เชื่อมต่อแบบขนานกับเครือข่ายหรือกับมอเตอร์ซิงโครนัสจะใช้ ลักษณะเชิงมุมเครื่องซิงโครนัสซึ่งแสดงถึงการพึ่งพาแรงบิดแม่เหล็กไฟฟ้า ม บนมุมโหลด θ ควรจำไว้ว่าในเครื่องซิงโครนัสเสาหลักมีจุดทำงานสองจุด: จุดหลัก ม พื้นฐานและปฏิกิริยา ม p และในเครื่องโพลที่ไม่โดดเด่น - เฉพาะประเด็นหลักเท่านั้น:
![]()
มุมรับน้ำหนัก θ nom สอดคล้องกับพิกัดแรงบิด ม ชื่อ แรงบิดสูงสุดของเครื่องซิงโครนัสจะกำหนดความจุเกินของเครื่องซิงโครนัส ซึ่งมีความสำคัญทั้งสำหรับเครื่องกำเนิดไฟฟ้าแบบซิงโครนัสที่ทำงานขนานกับเครือข่ายและสำหรับมอเตอร์ซิงโครนัส ในเครื่องซิงโครนัสขั้วเด่น แรงบิดสูงสุดสอดคล้องกับมุมโหลด θ = 90° ในเครื่องซิงโครนัสขั้วเด่น θ cr< 90° и обычно составляет 60 - 80° в зависимости от соотношения основного и реактивного ช่วงเวลาแม่เหล็กไฟฟ้ารถคันนี้
ในการคำนวณมุมโหลดวิกฤติ ซึ่งกำหนดความสามารถในการโอเวอร์โหลดของเครื่องซิงโครนัสโพลหลัก คุณสามารถใช้นิพจน์ได้