บทความต่อไปนี้จะรวมอุปกรณ์ที่ต้องควบคุมโหลดภายนอก สำหรับโหลดภายนอก ฉันหมายถึงทุกสิ่งที่ติดอยู่กับขาของไมโครคอนโทรลเลอร์ - ไฟ LED, หลอดไฟ, รีเลย์, มอเตอร์, แอคทูเอเตอร์... เอาล่ะ คุณเข้าใจแล้ว และไม่ว่าหัวข้อนี้จะแฮ็กแค่ไหนเพื่อหลีกเลี่ยงการซ้ำซ้อนในบทความต่อไปนี้ฉันยังคงเสี่ยงที่จะไม่เป็นต้นฉบับ - คุณจะยกโทษให้ฉัน :) ฉันจะแสดงวิธีเชื่อมต่อโหลดที่พบบ่อยที่สุดในรูปแบบการแนะนำสั้น ๆ (ถ้าคุณต้องการเพิ่มอะไรฉันจะดีใจเกินไปเท่านั้น)
ยอมรับทันทีว่าเรากำลังพูดถึงสัญญาณดิจิทัล (ไมโครคอนโทรลเลอร์ยังคงเป็นอุปกรณ์ดิจิทัล) และเราจะไม่เบี่ยงเบนไปจากตรรกะทั่วไป: 1
- รวมอยู่ด้วย, 0
-ปิด. เอาล่ะ.
รูปภาพแรกแสดงภาพรวมของทรานซิสเตอร์ในสถานการณ์ที่ขั้วเกตและท่อระบายน้ำเป็นศูนย์ ในสถานการณ์เช่นนี้ # การเชื่อมต่อไฟฟ้าระหว่างท่อระบายน้ำและแหล่งกำเนิด - ทรานซิสเตอร์ "อุดตัน" ในสถานการณ์นี้ สนามไฟฟ้าสร้างขึ้นโดยอิเล็กโทรดทำหน้าที่ผ่านฉนวนเซมิคอนดักเตอร์ - มันทำให้เกิดภาระเชิงพื้นที่ที่เรียกว่าอยู่ในนั้น ชั้นนี้เรียกว่าชั้นผกผันและประกอบด้วยอิเล็กตรอนอิสระ คุณสมบัติหลักของชั้นนี้คือการนำไฟฟ้า - ดังนั้นท่อระบายน้ำและแหล่งกำเนิดจึงเชื่อมต่อกันทางไฟฟ้า
โหลด กระแสตรงได้แก่: LED, หลอดไฟ, รีเลย์, มอเตอร์กระแสตรง, เซอร์โว, แอคทูเอเตอร์ต่างๆ ฯลฯ โหลดดังกล่าวเชื่อมต่อกับไมโครคอนโทรลเลอร์ได้ง่ายที่สุด (และบ่อยที่สุด)
1.1 การเชื่อมต่อ โหลดผ่านตัวต้านทาน
วิธีที่ง่ายที่สุดและอาจใช้บ่อยที่สุดเมื่อพูดถึง LED
อย่างไรก็ตาม ค่าของกระแสที่ไหลผ่านทรานซิสเตอร์ไม่ได้ขึ้นอยู่กับแรงดันไฟฟ้าเดรนเป็นเส้นตรง เนื่องจากการเพิ่มแรงดันไฟฟ้าของท่อระบายน้ำยังเปลี่ยนขั้วของเกตด้วย เมื่อแรงดันไฟฟ้าที่จ่ายให้กับเดรนเพิ่มขึ้น กระแสจะเพิ่มขึ้นแต่ก็เพิ่มขึ้นด้วย ความต้านทานรวมช่องทางผกผันที่สร้างขึ้นเนื่องจากการแคบลง เป็นผลให้กระแสที่เพิ่มขึ้นไม่เป็นเชิงเส้นและสอดคล้องกับกฎของโอห์ม ในสถานการณ์ที่แรงดันเกตเท่ากับแรงดันเดรน ช่องที่อยู่ใกล้มันจะหายไปโดยสิ้นเชิงและกระแสเดรนจะอิ่มตัว
ตอนนี้แรงดันไฟฟ้าสามารถเพิ่มได้ไม่ว่าในกรณีใด ๆ ให้เป็นค่าจำกัด และกระแสไฟฟ้าจะยังคงไม่เปลี่ยนแปลง สถานการณ์นี้แสดงไว้ในรูปที่ ในอุปกรณ์อิเล็กทรอนิกส์กำลังพื้นที่ไม่อิ่มตัวของทรานซิสเตอร์ดังกล่าวไม่ได้ถูกนำมาใช้จริงในทางตรงกันข้ามเป็นสิ่งที่ไม่พึงปรารถนาอย่างยิ่ง เมื่อสวิตช์ทรานซิสเตอร์จะใช้เฉพาะโซนความอิ่มตัวเท่านั้นนั่นคือโซนที่มีความต้านทานของทรานซิสเตอร์ต่ำที่สุด ยิ่งน้อยยิ่งดี เพราะทรานซิสเตอร์จะมีแรงดันตกคร่อมน้อยลง และความร้อนจะถูกปล่อยออกมาน้อยลง และอุปกรณ์ที่ทรานซิสเตอร์ทำงานก็จะมีประสิทธิภาพมากขึ้น

จำเป็นต้องมีตัวต้านทานเพื่อจำกัดกระแสที่ไหลผ่านขาไมโครคอนโทรลเลอร์ให้อยู่ในระดับที่อนุญาต 20mA- เรียกว่าบัลลาสต์หรือแดมปิ้ง คุณสามารถคำนวณค่าตัวต้านทานโดยประมาณได้โดยทราบค่าความต้านทานโหลด Rн
ในทางปฏิบัติ หมายความว่ามีความล่าช้าบ้างระหว่างแรงดันไฟฟ้าที่ใช้กับเกตของทรานซิสเตอร์และความอิ่มตัวของสีโดยสมบูรณ์ หากเรามีทรานซิสเตอร์ที่เปิดกระแสประมาณ 200A เราต้องการให้สถานะอิ่มตัวของทรานซิสเตอร์ต่ำที่สุดเท่าที่จะเป็นไปได้จากการสลับตามกำหนดเวลา เพราะถ้าไม่เกิดขึ้นอย่างรวดเร็ว มันจะอยู่ในบริเวณที่ไม่อิ่มตัวซึ่งทรานซิสเตอร์ จะมีพฤติกรรมเหมือนตัวต้านทานแบบนี้ จำนวนมากพลังงานความร้อนถูกปล่อยออกมาซึ่งทรานซิสเตอร์จะเผาไหม้
และเรารู้ว่าถ้าเราเปิดตัวเก็บประจุ มันจะชาร์จหลังจากผ่านไประยะหนึ่งเท่านั้น เช่นเดียวกับเมื่อต้องปิดทรานซิสเตอร์และเมื่อ 200A ไหลผ่านทรานซิสเตอร์ เรายังต้องทำอย่างรวดเร็วเพื่อผ่านบริเวณที่ไม่อิ่มตัวโดยเร็วที่สุด
การดับ =(5v / 0.02A) – Rн = 250 – รน
อย่างที่คุณเห็นแม้ในกรณีที่เลวร้ายที่สุดเมื่อความต้านทานโหลดเป็นศูนย์ 250 โอห์มก็เพียงพอแล้วเพื่อให้แน่ใจว่ากระแสจะไม่เกิน 20 mA ซึ่งหมายความว่าหากคุณไม่ต้องการนับบางสิ่งที่นั่น ให้ใส่ 300 โอห์มและคุณจะปกป้องพอร์ตจากการโอเวอร์โหลด ข้อดีของวิธีนี้ชัดเจน - ความเรียบง่าย
1.2 การเชื่อมต่อ โหลดโดยใช้ทรานซิสเตอร์แบบไบโพลาร์
หากเป็นเช่นนั้นโหลดของคุณกินไฟมากกว่า 20mA แน่นอนว่าตัวต้านทานจะไม่ช่วยที่นี่ คุณต้องเพิ่ม (เพิ่มความแข็งแกร่งในการอ่าน) ในปัจจุบัน ใช้อะไรขยายสัญญาณครับ? ขวา. ทรานซิสเตอร์!
ไดรเวอร์ดังกล่าวประกอบด้วยออปโตคัปเปลอร์ซึ่งมีให้ การแยกไฟฟ้าระหว่างส่วนกำลังและวงจรควบคุม ส่วนลอจิกและตัวขยายกำลังประกอบด้วยทรานซิสเตอร์แบบพุชพูลสองตัว การสลับทรานซิสเตอร์ถูกควบคุมโดยส่วนลอจิกของระบบ ขึ้นอยู่กับว่าอินพุตไดโอดเปิดอยู่หรือไม่ ถึงเวลาที่จะสร้างบางสิ่งในทางปฏิบัติแล้ว
ขั้นแรกให้เริ่มต้นด้วยแหล่งจ่ายไฟด้านคนขับ ระบบของฉันจะขับเคลื่อนไดรเวอร์ด้วยแรงดันไฟฟ้าแบบสมมาตร 15V เพื่อชาร์จเกตและ -5V เพื่อคายประจุอย่างมีประสิทธิภาพและรวดเร็ว ตอนนี้เมื่อตั้งค่าความถี่ของเครื่องกำเนิดไฟฟ้าแล้วเราก็สามารถควบคุมการทำงานของหลอดไฟได้ ในระหว่างการสร้างอุปกรณ์เราต้องจำไว้ การตัดสินใจเลือกที่ถูกต้ององค์ประกอบสำหรับแอปพลิเคชันที่พัฒนาแล้ว
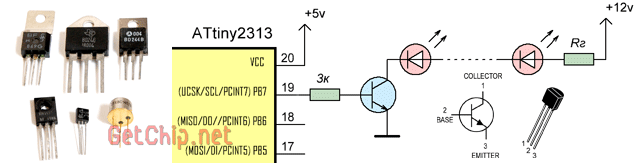
ใช้เสริมกำลังได้สะดวกกว่า n-p-nทรานซิสเตอร์ต่อตามวงจร OE- ด้วยวิธีนี้ คุณสามารถเชื่อมต่อโหลดที่มีแรงดันไฟฟ้าสูงกว่าแหล่งจ่ายไฟเข้ากับไมโครคอนโทรลเลอร์ได้ ตัวต้านทานบนฐานมีขีดจำกัด มันสามารถเปลี่ยนแปลงได้ในช่วงกว้าง (1-10 kOhm) ไม่ว่าในกรณีใดทรานซิสเตอร์จะทำงานในโหมดความอิ่มตัว ทรานซิสเตอร์สามารถเป็นอะไรก็ได้ n-p-nทรานซิสเตอร์. กำไรนั้นแทบไม่เกี่ยวข้องเลย ทรานซิสเตอร์ถูกเลือกตามกระแสของตัวสะสม (กระแสที่เราต้องการ) และแรงดันไฟฟ้าของตัวสะสม-อิมิตเตอร์ (แรงดันไฟฟ้าที่ให้พลังงานแก่โหลด) การกระจายพลังงานก็มีความสำคัญเช่นกัน - เพื่อไม่ให้ร้อนเกินไป
อย่างที่คุณเห็นที่ 1kHz รูปแบบของคลื่นนั้นสมบูรณ์แบบ แต่ก็มีค่ามาก ช่วงเวลาสั้น ๆขึ้นและลง. สำหรับค่านี้ก็ยังถือว่าไม่แย่ ดังนั้นข้อมูลบนแค็ตตาล็อกการ์ดจึงค่อนข้างต่ำ และด้วยไดรเวอร์นี้ เราสามารถขับทรานซิสเตอร์ได้ถึง 200 kHz ได้อย่างง่ายดาย โดยให้ความสนใจกับความจริงที่ว่าทรานซิสเตอร์ยังมีพลังงานสำรองอยู่ เนื่องจากเวลาเหล่านี้ นานกว่าแล้วและจะอยู่ในระหว่างการเปลี่ยนทำให้สูญเสียพลังงานมาก 13 รูปคลื่นเอาท์พุตที่ 214 kHz รูปที่ 14 รูปคลื่นเอาท์พุตที่ 714 kHz
การเชื่อมต่อใหม่เกิดความล่าช้าอย่างมาก ซึ่งจะก่อให้เกิดหายนะในระบบที่มีทรานซิสเตอร์แบบอินเทอร์ลีฟหลายตัวบนบริดจ์ ซึ่งการซิงโครไนซ์จะทำให้เกิดการซิงโครไนซ์ ไฟฟ้าลัดวงจรและการระเบิดของทรานซิสเตอร์ หากเราขัดจังหวะกระแสโดยใช้ทรานซิสเตอร์ตัวเดียว ความถี่ต่ำเราก็จะเกิดภาพสั่นไหว และสำหรับ ความถี่สูงเราจะไม่สังเกตเห็นอะไรมาก ด้วยวิธีนี้จึงเป็นไปไม่ได้ที่จะควบคุมอำนาจ เฉพาะการสิ้นเปลืองกระแสไฟเท่านั้นที่เปลี่ยนแปลงโดยระบบกำลังขับ เนื่องจากจำนวนพัลส์กระแสที่ต้องจ่ายให้กับเกตจะเปลี่ยนไปและกำลังทั้งหมดจะเพิ่มขึ้น ดังนั้นความถี่และความถี่ก็จะสูงขึ้น ปริมาณงานชัตเตอร์ยิ่งพารามิเตอร์ปัจจุบันของไดรเวอร์หรือสูงขึ้นเท่าใด ขั้นตอนเพิ่มเติมการจัดการ.
ในบรรดาตัวอักษรทั่วไปและเข้าถึงได้ง่ายคุณสามารถใช้ BC546, BC547, BC548, BC549 กับตัวอักษรใดก็ได้ (100mA) และแม้แต่ KT315 เดียวกันก็ทำได้เช่นกัน (ผู้ที่มีของเหลือจากหุ้นเก่า)
- เอกสารข้อมูลสำหรับทรานซิสเตอร์แบบไบโพลาร์ BC547
1.3 การเชื่อมต่อ โหลดโดยใช้ทรานซิสเตอร์สนามผล
จะเกิดอะไรขึ้นถ้ากระแสโหลดของเราอยู่ภายในสิบแอมแปร์? ไม่สามารถใช้ทรานซิสเตอร์แบบไบโพลาร์ได้เนื่องจากกระแสควบคุมของทรานซิสเตอร์ดังกล่าวมีขนาดใหญ่และน่าจะเกิน 20 mA เอาท์พุตอาจเป็นทรานซิสเตอร์แบบคอมโพสิต (อ่านด้านล่าง) หรือทรานซิสเตอร์แบบฟิลด์เอฟเฟกต์ (หรือที่รู้จักในชื่อ MOS หรือที่รู้จักในชื่อ MOSFET) ทรานซิสเตอร์สนามแม่เหล็กเป็นเพียงสิ่งมหัศจรรย์ เนื่องจากมันไม่ได้ถูกควบคุมโดยกระแส แต่โดยศักย์ไฟฟ้าที่ประตู ทำให้กระแสประตูด้วยกล้องจุลทรรศน์สามารถควบคุมกระแสโหลดขนาดใหญ่ได้
แต่ตอนนี้ ถ้าความถี่ถูกตั้งค่าคงที่ และเราเปลี่ยนการเติมสัญญาณ เราก็สามารถปรับกำลังของตัวรับความต้านทาน เช่น เครื่องทำความร้อนหรือหลอดไส้ได้ 16 ความถี่ 4.5 kHz เติม 20% - ระบบใช้ไฟ 3 A
รูปที่ 17 ความถี่ 4. 5 kHz, การเติม 60% - ระบบใช้ไฟฟ้ามากกว่า 6 A แล้ว รูปที่ 18 แผนภาพการเดินสายไฟสำหรับระบบควบคุมกำลังของฟาร์มกังหันลมขนาดเล็ก เมื่อวิเคราะห์การทำงานของวงจร พารามิเตอร์ทางกายภาพของทรานซิสเตอร์ที่เกี่ยวข้องกับกระบวนการทางกายภาพที่เกิดขึ้นบนทรานซิสเตอร์และไม่ขึ้นอยู่กับวงจรการเชื่อมต่อมีความสำคัญเป็นพิเศษ
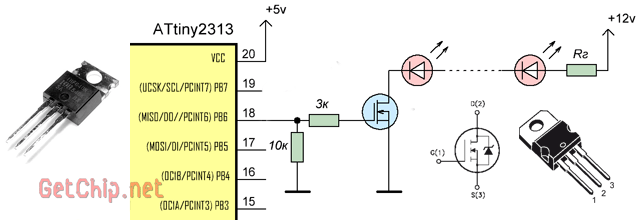
ทรานซิสเตอร์เอฟเฟกต์สนามแบบ n-channel ใด ๆ ที่เหมาะกับเรา เราเลือกตามกระแสแรงดันและการกระจายพลังงานเช่นเดียวกับไบโพลาร์
เมื่อเปิดทรานซิสเตอร์เอฟเฟกต์สนาม คุณต้องพิจารณาหลายประเด็น:
- เนื่องจากอันที่จริงแล้วเกทนั้นเป็นตัวเก็บประจุ เมื่อทรานซิสเตอร์เปลี่ยน กระแสขนาดใหญ่จะไหลผ่านมัน (ระยะสั้น) เพื่อจำกัดกระแสเหล่านี้ ให้วางตัวต้านทานจำกัดไว้ที่เกต
— ทรานซิสเตอร์ถูกควบคุมโดยกระแสต่ำ และหากเอาท์พุตของไมโครคอนโทรลเลอร์ที่เกตเชื่อมต่ออยู่ในสถานะ Z อิมพีแดนซ์สูง สวิตช์ฟิลด์จะเริ่มเปิดและปิดอย่างไม่อาจคาดเดาได้ และจับสัญญาณรบกวนได้ เพื่อกำจัดพฤติกรรมนี้ ต้อง "กด" ขาไมโครคอนโทรลเลอร์กับพื้นด้วยตัวต้านทานประมาณ 10 kOhm
ที่สนามเอฟเฟกต์ทรานซิสเตอร์กับพื้นหลังของมันทั้งหมด คุณสมบัติเชิงบวกมีข้อเสียเปรียบ ค่าใช้จ่ายในการควบคุมกระแสไฟฟ้าต่ำคือความช้าของทรานซิสเตอร์ แน่นอนว่ามันจะรองรับ PWM แต่หากเกินความถี่ที่อนุญาต มันจะตอบสนองต่อคุณด้วยความร้อนสูงเกินไป
การใช้พารามิเตอร์เหล่านี้ จะทำให้มีความเทียบเท่าทางกายภาพของทรานซิสเตอร์สัญญาณขนาดเล็กได้ ความต้านทานและพลังที่แตกต่างกัน ความต้านทานดิฟเฟอเรนเชียลของทางแยกตัวปล่อยถูกกำหนดโดยความสัมพันธ์ระหว่างแรงดันไฟฟ้าที่ใช้กับทางแยกตัวปล่อยและกระแสของตัวปล่อยเมื่อวงจรสะสมถูกจ่ายให้กับกระแสไฟฟ้าลัดวงจรสลับ
หากเราแทนที่ความเบี่ยงเบนของกระแสและแรงดันไฟฟ้าด้วยความเท่าเทียมกันเราจะได้ โดยที่: - แรงดันไฟฟ้าระหว่างตัวส่งและฐาน - กระแสของโหนดเชื่อมต่อ - ความตึงเครียดระหว่างตัวสะสมและฐาน กระแสของจุดเชื่อมต่อตัวปล่อยโพลาไรซ์จะถูกกำหนดตามความสัมพันธ์
1.4 การเชื่อมต่อ โหลดโดยใช้ทรานซิสเตอร์ดาร์ลิงตันแบบผสม
อีกทางเลือกหนึ่งนอกเหนือจากการใช้ทรานซิสเตอร์เอฟเฟกต์สนามสำหรับโหลดกระแสสูงคือการใช้ทรานซิสเตอร์ดาร์ลิงตันแบบคอมโพสิต ภายนอกเป็นทรานซิสเตอร์ตัวเดียวกับแบบไบโพลาร์ แต่ภายในวงจรปรีแอมพลิฟายเออร์ใช้เพื่อควบคุมทรานซิสเตอร์เอาท์พุตอันทรงพลัง สิ่งนี้ทำให้กระแสต่ำสามารถขับเคลื่อนโหลดที่ทรงพลังได้ การใช้ทรานซิสเตอร์ดาร์ลิงตันนั้นไม่น่าสนใจเท่ากับการใช้ชุดประกอบของทรานซิสเตอร์ดังกล่าว มีวงจรขนาดเล็กที่ยอดเยี่ยมเช่น ULN2003 ประกอบด้วยทรานซิสเตอร์ดาร์ลิงตันมากถึง 7 ตัว ซึ่งแต่ละตัวสามารถโหลดด้วยกระแสสูงถึง 500 mA และสามารถเชื่อมต่อแบบขนานเพื่อเพิ่มกระแสได้
กระแสไฟรั่วของทางแยกอิมิตเตอร์อยู่ที่ไหน ดังนั้นสำหรับความต้านทานดิฟเฟอเรนเชียลของทางแยกชั่วคราวเราสามารถเขียนได้ สำหรับ และ ความต้านทานส่วนต่างของทางแยกการเปลี่ยนผ่านนั้นไม่เพียงพอ ที่ความถี่ต่ำ วงจรสมมูลทางกายภาพสามารถละเลยได้
ความจุของทางแยกสะสม ความต้านทานส่วนต่างของทางแยกของตัวสะสมถูกกำหนดโดยความสัมพันธ์ระหว่างแรงดันไฟฟ้าที่ใช้กับทางแยกของตัวปล่อยและกระแสของตัวสะสมเมื่อวงจรตัวส่งสัญญาณทำงานที่ ไม่ได้ใช้งานหลังจาก กระแสสลับ.
โดยที่: - แรงดันไฟฟ้าระหว่างตัวสะสมและฐาน; - กระแสสะสม - ตัวปล่อยกระแส กระแสคอลเลกเตอร์จะไหลผ่านทางแยกโพลาไรซ์คอลเลกเตอร์ทางอ้อม และขึ้นอยู่กับแรงดันไฟฟ้าที่ใช้กับคอลเลคเตอร์เพียงเล็กน้อย ขนาดมีขนาดใหญ่ ความต้านทานส่วนต่างของการเชื่อมต่อตัวสะสมมักจะถูกกำหนดโดยผลการมอดูเลตของความหนาของฐานและกระแสรั่วไหล
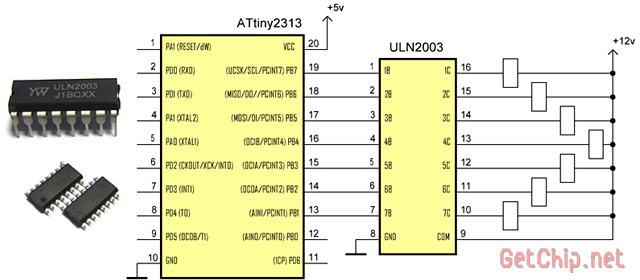
ไมโครเซอร์กิตเชื่อมต่อกับไมโครคอนโทรลเลอร์ได้ง่ายมาก (เพียงปักหมุดต่อพิน) มีสายไฟที่สะดวก (อินพุตตรงข้ามเอาต์พุต) และไม่จำเป็นต้องเดินสายเพิ่มเติม จากการออกแบบที่ประสบความสำเร็จนี้ ULN2003 จึงถูกนำมาใช้กันอย่างแพร่หลายในการฝึกวิทยุสมัครเล่น ดังนั้นการรับมันจึงไม่ใช่เรื่องยาก
- เอกสารข้อมูลสำหรับชุดประกอบ Darlington ULN2003
โดยการเปลี่ยนแรงดันไฟฟ้าที่จ่ายให้กับตัวสะสมจะทำให้เกิดการเปลี่ยนแปลงของตัวสะสม การเชื่อมต่อดูเหมือนจะเคลื่อนไประหว่างช่วงเวลาที่เพิ่มความตึงเครียดและการถอยกลับเพื่อลดความตึงเครียด เป็นผลให้การไล่ระดับฐานในฐานเพิ่มขึ้นตามความหนาของฐานลดลง และลดลงตามความหนาของฐานที่เพิ่มขึ้น ดังนั้น อัตราการเคลื่อนที่ของการแพร่กระจายของพาหะส่วนน้อยจึงแตกต่างกันไปจากฐานของโพรงที่รวมกระบวนการการแพร่กระจายจากตัวปล่อยไปยังตัวสะสม ซึ่งส่งผลให้เกิดการขึ้นต่อกันของค่าสัมประสิทธิ์การถ่ายโอนการแพร่ของโมฆะ และด้วยเหตุนี้ การขึ้นต่อกันของอัตราส่วนเกนต่อแรงดันไฟฟ้าที่ใช้กับทางแยกของตัวสะสม
หากคุณต้องการควบคุมอุปกรณ์ AC (ส่วนใหญ่มักจะเป็น 220v) ทุกอย่างจะซับซ้อนกว่า แต่ก็ไม่มาก
2.1 การเชื่อมต่อ โหลดโดยใช้รีเลย์
การเชื่อมต่อที่ง่ายที่สุดและน่าเชื่อถือที่สุดคือการใช้รีเลย์ คอยล์รีเลย์นั้นเป็นโหลดกระแสสูง ดังนั้นคุณจึงไม่สามารถเชื่อมต่อโดยตรงกับไมโครคอนโทรลเลอร์ได้ สามารถเชื่อมต่อรีเลย์ผ่านทรานซิสเตอร์แบบฟิลด์เอฟเฟกต์หรือไบโพลาร์ หรือผ่าน ULN2003 เดียวกันได้ หากต้องการหลายช่องสัญญาณ
จากการเปลี่ยนแปลงค่า การเปลี่ยนแปลงแรงดันไฟฟ้าของตัวสะสมก็เปลี่ยนค่าของกระแสของตัวสะสมด้วย สิ่งนี้ทำให้ความต้านทานส่วนต่างของตัวสะสมเพิ่มขึ้นอย่างสมบูรณ์ซึ่งมีลักษณะการแพร่กระจาย การเชื่อมต่อตัวสะสมโพลาไรซ์ทางอ้อมมีความสามารถที่กำหนดโดยความสัมพันธ์ระหว่างการเปลี่ยนแปลงของค่าโหลดในพื้นที่การเชื่อมต่อและค่าแรงดันไฟฟ้าของตัวสะสมเมื่อวงจรตัวปล่อยติดตั้งโหมดสแตนด์บาย โดยทั่วไปแล้วความจุของตัวสะสมจะมีขนาดเล็กกว่าความจุทางแยกอิมิตเตอร์โพลาไรซ์โดยตรงมาก

ข้อดีของวิธีนี้คือกระแสสวิตชิ่งสูง (ขึ้นอยู่กับรีเลย์ที่เลือก) การแยกกัลวานิก ข้อเสีย: ความเร็ว/ความถี่ในการเปิดใช้งานที่จำกัด และการสึกหรอทางกลของชิ้นส่วน
มันไม่สมเหตุสมผลเลยที่จะแนะนำบางอย่างให้ใช้งาน - มีรีเลย์มากมายให้เลือกตามพารามิเตอร์และราคาที่ต้องการ
ความต้านทานปริมาตรของฐาน วัสดุเซมิคอนดักเตอร์ในบริเวณฐานและหน้าสัมผัสฐานโอห์มมิกมีความต้านทานอยู่บ้าง จากการคำนวณแสดงให้เห็นว่าสามารถกำหนดความแข็งแรงของฐานตามอัตราส่วนได้ เมื่อความหนาของฐานเพิ่มขึ้นและความเข้มข้นของสารเจือปน ความต้านทานปริมาตรของฐานจะลดลง การเพิ่มขึ้นจะเพิ่มการสูญเสียในวงจรอินพุตซึ่งจะลดประสิทธิภาพของตัวปล่อย ตามกฎหมายทางกายภาพ การเพิ่มขึ้นควรลดกระแสของตัวปล่อยเมื่อใด แรงดันไฟฟ้าคงที่ระหว่างตัวปล่อยและฐานเนื่องจากแรงดันไฟฟ้านี้ถูกใช้ร่วมกันระหว่างทางแยกตัวปล่อยและความต้านทาน
2.2 การเชื่อมต่อ โหลดใช้ไตรแอค (triac)
หากคุณต้องการควบคุมโหลด AC ที่ทรงพลัง และโดยเฉพาะอย่างยิ่งถ้าคุณต้องการควบคุมพลังงานที่จ่ายให้กับโหลด (ไดเมอร์) คุณก็ทำไม่ได้โดยไม่ต้องใช้ triac (หรือ triac) ไทรแอกถูกเปิดโดยพัลส์กระแสสั้นผ่านอิเล็กโทรดควบคุม (สำหรับครึ่งคลื่นแรงดันลบและบวก) ไทรแอกจะปิดตัวเองเมื่อไม่มีแรงดันไฟฟ้า (เมื่อแรงดันไฟฟ้าผ่านศูนย์) นี่คือจุดเริ่มต้นของความยากลำบาก ไมโครคอนโทรลเลอร์จะต้องควบคุมช่วงเวลาที่แรงดันไฟฟ้าข้ามศูนย์ และในช่วงเวลาที่กำหนดไว้อย่างแม่นยำ ให้ส่งพัลส์เพื่อเปิดไตรแอค - นี่คือการทำงานของคอนโทรลเลอร์คงที่ ปัญหาอีกประการหนึ่งคือการขาด การแยกกัลวานิกที่ไตรแอค คุณต้องทำในองค์ประกอบที่แยกจากกัน ซึ่งจะทำให้วงจรซับซ้อนขึ้น
เพื่อเพิ่มประสิทธิภาพของตัวส่งสัญญาณและลดการสูญเสียพลังงานจำเป็นต้องลดความแข็งแรงของฐานลง การแนะนำความต้านทานในวงจรฐานจะคำนึงถึงปฏิกิริยาภายในในทรานซิสเตอร์และผลกระทบของการปรับความหนาของฐานต่อกระแสของตัวปล่อย อย่างไรก็ตาม ข้อควรพิจารณาเหล่านี้ไม่ได้ให้ความแม่นยำที่จำเป็นแก่เรา และจำเป็นต้องเพิ่มความต้านทานการแพร่กระจาย ดังนั้น วงจรพื้นฐานจึงมีคุณลักษณะเฉพาะคืออิมพีแดนซ์
วงจรสมมูลสำหรับการสื่อสารพื้นฐานทั่วไป วงจรสมมูลนี้แสดงไว้ในรูปที่ ในวงจรสมมูล การเชื่อมต่อตัวส่งและตัวสะสมจะแสดงด้วยความต้านทานส่วนต่าง ประสิทธิภาพการถ่ายโอนของกระแสอิมิตเตอร์ในวงจรสะสมในวงจรสมมูลจะถูกระบุเป็นตัวกำเนิดกระแสซึ่งจะแสดงค่าสัมประสิทธิ์การถ่ายโอนของกระแสอิมิตเตอร์ ขั้วสัมพัทธ์ของกระแสไฟฟ้าของเครื่องกำเนิดไฟฟ้าในวงจรสมมูลจะถูกกำหนดโดยทิศทางบวกของกระแสตัวปล่อย
แม้ว่าไทรแอกสมัยใหม่จะถูกควบคุมด้วยกระแสไฟฟ้าที่ค่อนข้างต่ำและสามารถเชื่อมต่อได้โดยตรง (ผ่านตัวต้านทานจำกัด) เข้ากับไมโครคอนโทรลเลอร์ แต่ด้วยเหตุผลด้านความปลอดภัย จะต้องเปิดอุปกรณ์เหล่านี้ผ่านอุปกรณ์แยกการเชื่อมต่อด้วยแสง ยิ่งไปกว่านั้น สิ่งนี้ไม่เพียงใช้กับวงจรควบคุมไตรแอคเท่านั้น แต่ยังรวมถึงวงจรควบคุมที่เป็นศูนย์ด้วย 
ในการกลับทิศทางของกระแสอิมิตเตอร์ ขั้วของเครื่องกำเนิดไฟฟ้าจะกลับด้าน กฎหมายที่อธิบายไว้ถูกกำหนดโดยกระบวนการทางกายภาพที่เกิดขึ้นกับทรานซิสเตอร์ ก็ควรสังเกตว่า ความต้านทานภายในเครื่องกำเนิดกระแสไฟฟ้าสำหรับกระแสไฟขาออกมีแนวโน้มที่จะไม่มีที่สิ้นสุด ในวงจรสมมูลที่แสดงในรูปที่ 19 ค่าสัมประสิทธิ์การถ่ายโอนปัจจุบันถือว่าไม่ขึ้นอยู่กับผลการปรับความหนาหลัก การมีอยู่ของความต้านทานในวงจรฐานจะแสดงการเชื่อมต่อภายในของทรานซิสเตอร์แบบไบโพลาร์และผลกระทบของการมอดูเลตฐานต่อกระแสของตัวปล่อย
วิธีที่ค่อนข้างคลุมเครือในการเชื่อมต่อโหลด เนื่องจากในอีกด้านหนึ่งจำเป็นต้องมีส่วนร่วมอย่างแข็งขันของไมโครคอนโทรลเลอร์และการออกแบบวงจรที่ค่อนข้างซับซ้อน ในทางกลับกัน ช่วยให้คุณสามารถจัดการโหลดได้อย่างยืดหยุ่นมาก ข้อเสียอีกประการหนึ่งของการใช้ triac คือสัญญาณรบกวนดิจิตอลจำนวนมากที่สร้างขึ้นระหว่างการทำงาน - จำเป็นต้องมีวงจรปราบปราม
ไทรแอกมีการใช้กันอย่างแพร่หลาย และในบางพื้นที่ก็ไม่สามารถทดแทนได้ ดังนั้นการได้มาจึงไม่ใช่ปัญหา Triacs ประเภท BT138 มักใช้ในวิทยุสมัครเล่น
06 ม.ค. 2560ในทางปฏิบัติ มักมีความจำเป็นต้องควบคุมอุปกรณ์ไฟฟ้ากำลังแรงบางชนิดโดยใช้วงจรดิจิทัล (เช่น ไมโครคอนโทรลเลอร์) นี่อาจเป็น LED ที่ทรงพลังซึ่งกินกระแสไฟสูงหรืออุปกรณ์ที่ใช้พลังงานจากเครือข่าย 220 V ลองพิจารณาวิธีแก้ปัญหาทั่วไปสำหรับปัญหานี้
ประเภทของการควบคุม
ตามอัตภาพสามารถแยกแยะวิธีการได้สามกลุ่ม:
- การควบคุมโหลดไฟฟ้ากระแสตรง
- สวิตช์ทรานซิสเตอร์ที่ใช้ทรานซิสเตอร์แบบไบโพลาร์
- สวิตช์ทรานซิสเตอร์ที่ใช้ทรานซิสเตอร์ MOS (MOSFET)
- สวิตช์ทรานซิสเตอร์ IGBT
- การควบคุมโหลดไฟฟ้ากระแสสลับ
- สวิตช์ไทริสเตอร์
- ไทรแอกคีย์
- วิธีการสากล
- รีเลย์
การเลือกวิธีการควบคุมขึ้นอยู่กับทั้งประเภทของโหลดและประเภทของลอจิกดิจิทัลที่ใช้ หากวงจรถูกสร้างขึ้นบนชิป TTL ก็ควรจำไว้ว่าวงจรนั้นถูกควบคุมโดยกระแส ตรงกันข้ามกับ CMOS ซึ่งการควบคุมจะดำเนินการด้วยแรงดันไฟฟ้า บางครั้งก็เป็นเรื่องสำคัญ
สวิตช์ทรานซิสเตอร์แบบไบโพลาร์
สำหรับปัจจุบัน $I_(LED) = 0(,)075\,A$ กระแสควบคุมควรน้อยกว่า $\beta = 50$ เท่า:
ขอให้เรานำแรงดันไฟฟ้าตกคร่อมการเปลี่ยนฐานตัวปล่อยให้เท่ากับ $V_(EB) = 0(,)7\,V$
แนวต้านถูกปัดเศษลงเพื่อให้มีระยะขอบปัจจุบัน
ดังนั้นเราจึงพบค่าความต้านทาน R1 และ R2
ทรานซิสเตอร์ดาร์ลิงตัน
หากโหลดมีกำลังมากกระแสไฟฟ้าที่ไหลผ่านจะสามารถเข้าถึงหลายแอมแปร์ สำหรับทรานซิสเตอร์กำลังสูง ค่าสัมประสิทธิ์ $\beta$ อาจไม่เพียงพอ (ยิ่งกว่านั้นดังที่เห็นได้จากตารางสำหรับทรานซิสเตอร์ที่ทรงพลังนั้นมีขนาดเล็กอยู่แล้ว)
ในกรณีนี้สามารถใช้ทรานซิสเตอร์สองตัวได้ ทรานซิสเตอร์ตัวแรกจะควบคุมกระแส ซึ่งจะเปิดทรานซิสเตอร์ตัวที่สอง วงจรเชื่อมต่อนี้เรียกว่าวงจรดาร์ลิงตัน
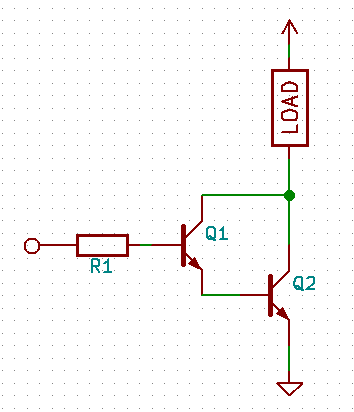
ในวงจรนี้ ค่าสัมประสิทธิ์ $\beta$ ของทรานซิสเตอร์สองตัวจะถูกคูณ ส่งผลให้ค่าสัมประสิทธิ์การถ่ายโอนกระแสมีขนาดใหญ่มาก
หากต้องการเพิ่มความเร็วในการปิดของทรานซิสเตอร์ คุณสามารถเชื่อมต่อตัวปล่อยและฐานของแต่ละตัวด้วยตัวต้านทานได้

ความต้านทานจะต้องมีขนาดใหญ่พอที่จะไม่ส่งผลกระทบต่อกระแสไฟฟ้าของตัวปล่อยฐาน ค่าทั่วไปคือ 5…10 kOhm สำหรับแรงดันไฟฟ้า 5…12 V.
ทรานซิสเตอร์ดาร์ลิงตันมีจำหน่ายในรูปแบบ อุปกรณ์แยกต่างหาก- ตัวอย่างของทรานซิสเตอร์ดังกล่าวแสดงไว้ในตาราง
มิฉะนั้นการทำงานของคีย์จะยังคงเหมือนเดิม
สวิตช์ทรานซิสเตอร์เอฟเฟกต์สนาม
ในอนาคต เราจะเรียกทรานซิสเตอร์ภาคสนามโดยเฉพาะว่า MOSFET ซึ่งก็คือทรานซิสเตอร์ภาคสนามที่มีเกทหุ้มฉนวน (หรือ MOS หรือ MIS) สะดวกเพราะถูกควบคุมโดยแรงดันไฟฟ้าเท่านั้น: หากแรงดันเกตมากกว่าแรงดันเกณฑ์ทรานซิสเตอร์จะเปิดขึ้น ในกรณีนี้ กระแสควบคุมจะไม่ไหลผ่านทรานซิสเตอร์ในขณะที่เปิดหรือปิด นี่เป็นข้อได้เปรียบที่สำคัญเหนือทรานซิสเตอร์แบบไบโพลาร์ ซึ่งกระแสจะไหลตลอดเวลาที่ทรานซิสเตอร์เปิดอยู่
นอกจากนี้ ในอนาคตเราจะใช้ MOSFET แบบ n-channel เท่านั้น (แม้แต่วงจรพุช-พูล) เนื่องจากทรานซิสเตอร์แบบ n-channel ราคาถูกกว่าและมีประสิทธิภาพดีกว่า
วงจรสวิตช์ที่ง่ายที่สุดโดยใช้ MOSFET แสดงอยู่ด้านล่าง

อีกครั้งที่โหลดเชื่อมต่อ "จากด้านบน" เข้ากับท่อระบายน้ำ หากต่อจากด้านล่าง วงจรจะไม่ทำงาน ความจริงก็คือทรานซิสเตอร์จะเปิดขึ้นหากแรงดันไฟฟ้าระหว่างเกตและแหล่งกำเนิดเกินเกณฑ์ เมื่อเชื่อมต่อ "จากด้านล่าง" โหลดจะทำให้เกิดแรงดันไฟฟ้าตกเพิ่มเติม และทรานซิสเตอร์อาจไม่เปิดหรือเปิดไม่สุด
ด้วยการควบคุมแบบกดดึง วงจรคายประจุของตัวเก็บประจุจะสร้างวงจร RC ขึ้นจริง กระแสสูงสุดอันดับจะเท่ากัน
โดยที่ $V$ คือแรงดันไฟฟ้าที่ควบคุมทรานซิสเตอร์
ดังนั้นจึงเพียงพอที่จะติดตั้งตัวต้านทาน 100 โอห์มเพื่อจำกัดกระแสประจุและคายประจุไว้ที่ 10 mA แต่ยิ่งความต้านทานของตัวต้านทานมากเท่าไร ตัวต้านทานก็จะเปิดและปิดช้าลงเท่านั้น เนื่องจากค่าคงที่เวลา $\tau = RC$ จะเพิ่มขึ้น นี่เป็นสิ่งสำคัญหากทรานซิสเตอร์เปลี่ยนบ่อยครั้ง ตัวอย่างเช่น ในตัวควบคุม PWM
พารามิเตอร์หลักที่คุณควรคำนึงถึงคือแรงดันไฟฟ้าเกณฑ์ $V_(th)$ กระแสสูงสุดที่ผ่านเดรน $I_D$ และความต้านทานของเดรน-ซอร์ส $R_(DS)$ ของทรานซิสเตอร์แบบเปิด
ด้านล่างนี้เป็นตารางพร้อมตัวอย่างคุณลักษณะของ MOSFET
| แบบอย่าง | $V_(th)$ | $\สูงสุด\I_D$ | $\สูงสุด\R_(DS)$ |
|---|---|---|---|
| 2N7000 | 3 ว | 200 มิลลิแอมป์ | 5 โอห์ม |
| IRFZ44N | 4 วี | 35 อ | 0.0175 โอห์ม |
| IRF630 | 4 วี | 9 อ | 0.4 โอห์ม |
| IRL2505 | 2 วี | 74 อ | 0.008 โอห์ม |
ค่าสูงสุดจะได้รับสำหรับ $V_(th)$ ความจริงก็คือสำหรับทรานซิสเตอร์ที่แตกต่างกันแม้จะมาจากแบตช์เดียวกันก็ตามพารามิเตอร์นี้ก็อาจแตกต่างกันอย่างมาก แต่ถ้าค่าสูงสุดคือ 3 V แสดงว่าทรานซิสเตอร์นี้รับประกันว่าจะใช้ในวงจรดิจิตอลที่มีแรงดันไฟฟ้า 3.3 V หรือ 5 V
ความต้านทานของแหล่งระบายของทรานซิสเตอร์รุ่นข้างต้นมีขนาดค่อนข้างเล็ก แต่ควรจำไว้ว่าที่แรงดันไฟฟ้าสูงของโหลดที่ควบคุมแม้สิ่งนี้สามารถนำไปสู่การปล่อยพลังงานที่สำคัญในรูปของความร้อนได้
วงจรสวิตชิ่งอย่างรวดเร็ว
ดังที่ได้กล่าวไปแล้ว หากแรงดันไฟฟ้าที่เกตสัมพันธ์กับแหล่งกำเนิดเกินแรงดันไฟฟ้าเกณฑ์ ทรานซิสเตอร์จะเปิดขึ้นและความต้านทานของแหล่งกำเนิดเดรนจะต่ำ อย่างไรก็ตามแรงดันไฟฟ้าเมื่อเปิดเครื่องไม่สามารถข้ามไปที่เกณฑ์ได้ทันที และที่ค่าต่ำกว่า ทรานซิสเตอร์จะทำหน้าที่เป็นตัวต้านทานและกระจายความร้อน หากต้องเปิดโหลดบ่อยครั้ง (เช่นในตัวควบคุม PWM) ขอแนะนำให้เปลี่ยนทรานซิสเตอร์จากสถานะปิดเป็นสถานะเปิดและกลับโดยเร็วที่สุด

ให้ความสนใจกับตำแหน่งของโหลดสำหรับทรานซิสเตอร์ n-channel อีกครั้ง - มันอยู่ที่ "ด้านบน" หากคุณวางไว้ระหว่างทรานซิสเตอร์กับกราวด์ เนื่องจากแรงดันไฟฟ้าตกคร่อมโหลด แรงดันไฟฟ้าของแหล่งเกตอาจน้อยกว่าเกณฑ์ ทรานซิสเตอร์จะไม่เปิดอย่างสมบูรณ์ และอาจร้อนเกินไปและล้มเหลว
ไดร์เวอร์ทรานซิสเตอร์สนามผล
หากคุณยังคงต้องเชื่อมต่อโหลดกับทรานซิสเตอร์ n-channel ระหว่างท่อระบายน้ำกับกราวด์ แสดงว่ามีวิธีแก้ปัญหา คุณสามารถใช้ชิปสำเร็จรูป - ไดรเวอร์ด้านสูง ด้านบน - เนื่องจากทรานซิสเตอร์อยู่ด้านบน
นอกจากนี้ยังมีไดรเวอร์ของแขนทั้งบนและล่าง (เช่น IR2151) เพื่อสร้างวงจรพุชพูล แต่ไม่จำเป็นสำหรับการเปิดโหลดเพียงอย่างเดียว นี่เป็นสิ่งจำเป็นหากไม่สามารถทิ้งสิ่งของให้ "แขวนอยู่ในอากาศ" ได้ แต่ต้องดึงลงกับพื้น
ลองดูวงจรไดร์เวอร์ฝั่งสูงโดยใช้ IR2117 เป็นตัวอย่าง
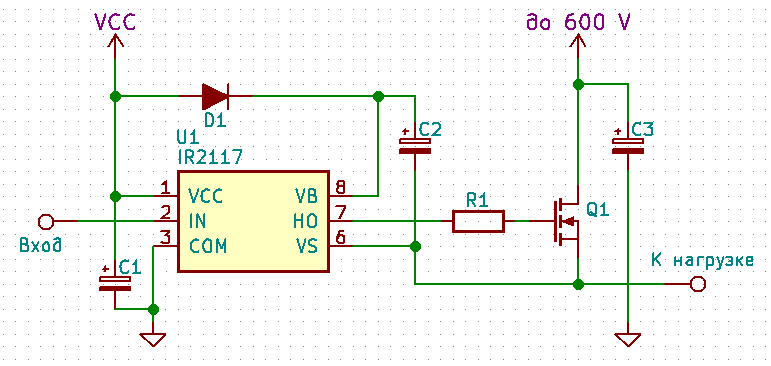
วงจรไม่ซับซ้อนมากและการใช้ไดรเวอร์ทำให้คุณสามารถใช้ทรานซิสเตอร์ได้อย่างมีประสิทธิภาพสูงสุด
ไอจีบีที
อื่น ชั้นเรียนที่น่าสนใจอุปกรณ์เซมิคอนดักเตอร์ที่สามารถใช้เป็นสวิตช์ได้คือทรานซิสเตอร์แบบไบโพลาร์เกตแบบหุ้มฉนวน (IGBT)
พวกเขารวมข้อดีของทั้งทรานซิสเตอร์ MOS และไบโพลาร์เข้าด้วยกัน: มีการควบคุมแรงดันไฟฟ้าและมีแรงดันไฟฟ้าและกระแสสูงสุดที่อนุญาตในระดับสูง
คุณสามารถควบคุมสวิตช์บน IGBT ได้ในลักษณะเดียวกับสวิตช์บน MOSFET เนื่องจาก IGBT ถูกใช้ในอุปกรณ์อิเล็กทรอนิกส์กำลังมากกว่า จึงมักใช้ร่วมกับไดรเวอร์
ตัวอย่างเช่น ตามเอกสารข้อมูล สามารถใช้ IR2117 เพื่อควบคุม IGBT ได้

ตัวอย่าง IGBT คือ IRG4BC30F
การควบคุมโหลดไฟฟ้ากระแสสลับ
รูปแบบก่อนหน้านี้ทั้งหมดมีความโดดเด่นด้วยความจริงที่ว่าโหลดถึงแม้จะทรงพลัง แต่ทำงานบนกระแสตรง วงจรมีการกำหนดกราวด์และสายไฟไว้อย่างชัดเจน (หรือสองเส้น - สำหรับตัวควบคุมและโหลด)
สำหรับวงจรไฟฟ้ากระแสสลับต้องใช้แนวทางที่แตกต่างกัน สิ่งที่พบบ่อยที่สุดคือการใช้ไทริสเตอร์, ไทรแอกและรีเลย์ เราจะมาดูรีเลย์กันในภายหลัง แต่สำหรับตอนนี้เรามาพูดถึงสองรายการแรกกันดีกว่า
ไทริสเตอร์และไทรแอก
ไทริสเตอร์เป็นอุปกรณ์เซมิคอนดักเตอร์ที่สามารถมีได้สองสถานะ:
- เปิด - ผ่านกระแส แต่ไปในทิศทางเดียวเท่านั้น
- ปิด - ไม่อนุญาตให้กระแสไหลผ่าน
เนื่องจากไทริสเตอร์ส่งผ่านกระแสในทิศทางเดียวเท่านั้น จึงไม่เหมาะมากสำหรับการเปิดและปิดโหลด ครึ่งหนึ่งของเวลาในแต่ละช่วงเวลากระแสสลับที่อุปกรณ์ไม่ได้ใช้งาน อย่างไรก็ตามไทริสเตอร์สามารถใช้ในเครื่องหรี่ได้ ที่นั่นสามารถใช้เพื่อควบคุมพลังงาน โดยตัดพลังงานที่ต้องการออกจากคลื่นพลังงาน
จริงๆ แล้ว ไทรแอกก็คือไทริสเตอร์แบบสองทิศทาง ซึ่งหมายความว่าอนุญาตให้ส่งผ่านได้ไม่ครึ่งคลื่น แต่เป็นคลื่นเต็มของแรงดันไฟฟ้าโหลด
มีสองวิธีในการเปิด triac (หรือไทริสเตอร์):
- จ่ายกระแสไฟปลดล็อค (อย่างน้อยช่วงสั้น ๆ) ไปยังอิเล็กโทรดควบคุม
- ใช้ไฟฟ้าแรงสูงเพียงพอกับอิเล็กโทรดที่ "ใช้งานได้"
วิธีที่สองไม่เหมาะกับเราเนื่องจากแรงดันไฟฟ้าจะมีแอมพลิจูดคงที่
หลังจากที่ไทรแอกเปิดขึ้นแล้ว ก็สามารถปิดได้โดยการเปลี่ยนขั้วหรือลดกระแสที่ไหลผ่านให้เหลือค่าน้อยกว่ากระแสยึดที่เรียกว่า แต่เนื่องจากแหล่งจ่ายไฟมาจากกระแสสลับ สิ่งนี้จะเกิดขึ้นโดยอัตโนมัติเมื่อสิ้นสุดครึ่งรอบ
เมื่อเลือก triac สิ่งสำคัญคือต้องคำนึงถึงขนาดของกระแสไฟที่ถือ ($I_H$) หากคุณใช้ไทรแอคอันทรงพลังที่มีกระแสไฟค้างสูง กระแสที่ผ่านโหลดอาจน้อยเกินไป และไทรแอคก็จะไม่เปิด
ไทรแอกคีย์
สำหรับการแยกวงจรควบคุมและวงจรไฟฟ้าแบบกัลวานิกควรใช้ออปโตคัปเปลอร์หรือไดรเวอร์ triac พิเศษ ตัวอย่างเช่น MOC3023M หรือ MOC3052
ออปโตคัปเปลอร์เหล่านี้ประกอบด้วย LED อินฟราเรดและโฟโตไทรแอก โฟโตไทรแอกนี้สามารถใช้เพื่อควบคุมสวิตช์ไทรแอคอันทรงพลัง
MOC3052 มีแรงดันไฟฟ้า LED 3V ลดลงและกระแสไฟ 60mA ดังนั้นคุณอาจจำเป็นต้องใช้ LED เพิ่มเติมเมื่อเชื่อมต่อกับไมโครคอนโทรลเลอร์ สวิตช์ทรานซิสเตอร์.
Triac ในตัวได้รับการออกแบบสำหรับแรงดันไฟฟ้าสูงถึง 600 V และกระแสสูงถึง 1 A ซึ่งเพียงพอที่จะควบคุมพลังอันทรงพลัง เครื่องใช้ในครัวเรือนผ่านไทรแอกกำลังสอง
พิจารณาวงจรสำหรับควบคุมโหลดความต้านทาน (เช่น หลอดไส้)
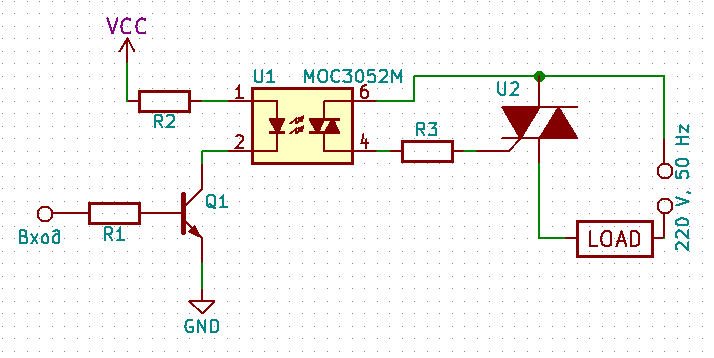
ดังนั้นออปโตคัปเปลอร์นี้จึงทำหน้าที่เป็นตัวขับไตรแอค
นอกจากนี้ยังมีไดรเวอร์ที่มีตัวตรวจจับเป็นศูนย์ - เช่น MOC3061 พวกเขาเปลี่ยนเฉพาะตอนเริ่มต้นของช่วงเวลาซึ่งช่วยลดการรบกวนในระบบไฟฟ้า
ตัวต้านทาน R1 และ R2 คำนวณตามปกติ ความต้านทานของตัวต้านทาน R3 ถูกกำหนดโดยแรงดันไฟฟ้าสูงสุดในเครือข่ายแหล่งจ่ายไฟและกระแสการปลดล็อคของไทรแอกกำลัง ถ้าคุณเอาอันที่ใหญ่เกินไป triac จะไม่เปิด ถ้าเล็กเกินไปกระแสก็จะไหลไปเปล่าๆ อาจจำเป็นต้องใช้ตัวต้านทานกำลังสูง
จะมีประโยชน์หากจำได้ว่า 220 V ในเครือข่ายไฟฟ้าคือค่าของแรงดันไฟฟ้าที่มีประสิทธิภาพ แรงดันไฟฟ้าสูงสุดคือ $\sqrt2 \cdot 220 \ประมาณ 310\,V$
การควบคุมโหลดแบบเหนี่ยวนำ
เมื่อขับโหลดแบบเหนี่ยวนำ เช่น มอเตอร์ไฟฟ้า หรือเมื่อมีเสียงรบกวนในสาย แรงดันไฟฟ้าอาจสูงพอที่จะทำให้ไทรแอกเปิดออกเอง เพื่อต่อสู้กับปรากฏการณ์นี้จำเป็นต้องเพิ่ม snubber ให้กับวงจร - นี่คือตัวเก็บประจุแบบปรับให้เรียบและตัวต้านทานขนานกับ triac

คนดูถูกไม่ได้ปรับปรุงสถานการณ์การปล่อยมลพิษมากนัก แต่ก็ดีกว่าถ้าไม่มีมัน
ตัวเก็บประจุเซรามิกต้องได้รับการออกแบบสำหรับแรงดันไฟฟ้าที่มากกว่าค่าพีคในแหล่งจ่ายไฟ โปรดจำไว้อีกครั้งว่าสำหรับ 220 V นี่คือ 310 V ควรใช้สำรองจะดีกว่า
ค่าทั่วไป: $C_1 = 0(,)01\,uF$, $R_4 = 33\,Ohm$
นอกจากนี้ยังมีรุ่น triac ที่ไม่ต้องใช้คนดูแคลน เช่น BTA06-600C
ตัวอย่างของไทรแอก
ตัวอย่างของไทรแอกแสดงไว้ในตารางด้านล่าง โดยที่ $I_H$ คือกระแสที่ค้างไว้, $\max\ I_(T(RMS))$ คือกระแสสูงสุด, $\max\ V_(DRM)$ คือแรงดันไฟฟ้าสูงสุด, $I_(GT)$ คือกระแสการปลดล็อค .
| แบบอย่าง | $I_H$ | $\สูงสุด\I_(T(RMS))$ | $\สูงสุด\V_(DRM)$ | $I_(GT)$ |
|---|---|---|---|---|
| BT134-600D | 10 มิลลิแอมป์ | 4 ก | 600 โวลต์ | 5 มิลลิแอมป์ |
| MAC97A8 | 10 มิลลิแอมป์ | 0.6 ก | 600 โวลต์ | 5 มิลลิแอมป์ |
| Z0607 | 5 มิลลิแอมป์ | 0.8 ก | 600 โวลต์ | 5 มิลลิแอมป์ |
| บีทีเอ06-600ซี | 25 มิลลิแอมป์ | 6 ก | 600 โวลต์ | 50 มิลลิแอมป์ |
รีเลย์
รีเลย์แม่เหล็กไฟฟ้า
จากมุมมองของไมโครคอนโทรลเลอร์ รีเลย์เองก็เป็นโหลดที่ทรงพลังและเป็นโหลดแบบอุปนัยด้วย ดังนั้นหากต้องการเปิดหรือปิดรีเลย์คุณต้องใช้สวิตช์ทรานซิสเตอร์เช่น แผนภาพการเชื่อมต่อและการปรับปรุงโครงการนี้ได้ถูกกล่าวถึงก่อนหน้านี้
รีเลย์สร้างความประทับใจด้วยความเรียบง่ายและมีประสิทธิภาพ ตัวอย่างเช่น รีเลย์ HLS8-22F-5VDC ควบคุมด้วยแรงดันไฟฟ้า 5 V และสามารถสลับโหลดที่ต้องใช้กระแสสูงถึง 15 A
โซลิดสเตตรีเลย์
ข้อได้เปรียบหลักของรีเลย์ - ใช้งานง่าย - ถูกบดบังด้วยข้อเสียหลายประการ:
- นี้ อุปกรณ์เครื่องจักรกลและหน้าสัมผัสอาจสกปรกหรือเชื่อมถึงกัน
- ความเร็วในการเปลี่ยนที่ต่ำกว่า
- กระแสที่ค่อนข้างใหญ่สำหรับการสลับ
- ผู้ติดต่อคลิก
ข้อบกพร่องบางประการเหล่านี้ถูกกำจัดออกไปในสิ่งที่เรียกว่าโซลิดสเตตรีเลย์ อันที่จริงสิ่งเหล่านี้เป็นอุปกรณ์เซมิคอนดักเตอร์ที่มีการแยกกัลวานิกซึ่งบรรจุอยู่ภายในวงจรสวิตช์อันทรงพลังที่เต็มเปี่ยม
บทสรุป
ดังนั้นเราจึงมีวิธีควบคุมโหลดเพียงพอในคลังแสงของเราเพื่อแก้ปัญหาเกือบทุกปัญหาที่อาจเกิดขึ้นสำหรับนักวิทยุสมัครเล่น
บรรณาธิการโครงการ
ไดอะแกรมทั้งหมดวาดด้วย KiCAD ช่วงนี้ฉันใช้มันกับโปรเจ็กต์ของฉัน มันสะดวกมาก ฉันแนะนำเลย ด้วยความช่วยเหลือคุณไม่เพียง แต่สามารถวาดวงจรเท่านั้น แต่ยังสามารถออกแบบแผงวงจรพิมพ์ได้อีกด้วย