தற்போது இயந்திரங்கள் DCகண்டுபிடிக்கப்பட்டது பரந்த பயன்பாடுபல்வேறு தொழில்களில். பரந்த அளவிலான வேகம் மற்றும் முறுக்குவிசையின் மென்மையான மற்றும் துல்லியமான கட்டுப்பாடு தேவைப்படும் இடங்களில் DC மோட்டார்கள் பயன்படுத்தப்படுகின்றன. இந்த கட்டுரையில் நான் ஒரு டிசி மோட்டருக்கான கட்டுப்பாட்டு அலகு உருவாக்குவது பற்றி பேசுவேன், இது மோட்டார் ஷாஃப்ட்டின் வேகத்தை மாற்றவும், மோட்டார் ஷாஃப்ட்டின் சுமையைப் பொருட்படுத்தாமல் ஒரு குறிப்பிட்ட மட்டத்தில் வேகத்தை உறுதிப்படுத்தவும் அனுமதிக்கும்.
ஒற்றை-சுற்று கட்டுப்பாட்டு அமைப்புடன் கூடிய சர்வோ டிரைவின் செயல்பாட்டுக் கொள்கையை அடிப்படையாகக் கொண்டது வளர்ச்சி.
கட்டுப்பாட்டு அலகு பின்வரும் கூறுகளைக் கொண்டுள்ளது:
- SIFU (துடிப்பு-கட்ட கட்டுப்பாட்டு அமைப்பு)
- ஒழுங்குபடுத்துபவர்
- பாதுகாப்பு
இயக்ககத்தின் திட்ட வரைபடம் கீழே காட்டப்பட்டுள்ளது.
பெரியது
வரைபடத்தை இன்னும் விரிவாகப் பார்ப்போம்.
எனவே, SIFU (பல்ஸ்-ஃபேஸ் கண்ட்ரோல் சிஸ்டம்) - சைனூசாய்டல் நெட்வொர்க் மின்னழுத்தத்தை பவர் தைரிஸ்டர்களின் கட்டுப்பாட்டு மின்முனைகளுக்குச் செல்லும் செவ்வக பருப்புகளின் தொடராக மாற்றுகிறது. கட்டுப்பாட்டு அலகு இயக்கும் போது மாற்று மின்னழுத்தம் 14-16V பிரிட்ஜ் ரெக்டிஃபையர் D1 க்கு வழங்கப்படுகிறது, அங்கு அது ஒரு துடிப்பு மின்னழுத்தமாக மாற்றப்படுகிறது, இது சுற்றுக்கு சக்தி அளிக்க மட்டுமல்லாமல், இயக்ககத்தின் செயல்பாட்டை ஒத்திசைக்கவும் உதவுகிறது. மின்தேக்கி C1 மூலம் பருப்புகளை மென்மையாக்குவதை டையோடு D2 தடுக்கிறது. அடுத்து, பருப்பு வகைகள் "ஜீரோ டிடெக்டர்" - DA1.1 -க்கு வந்து, LM324 சிப்பின் ஒரு op-amp இல் இணைக்கப்பட்டு, ஒப்பீட்டு பயன்முறையில் இயங்குகிறது. துடிப்பு இல்லை என்றாலும், நேரடி மற்றும் தலைகீழ் உள்ளீடுகளில் உள்ள மின்னழுத்தங்கள் தோராயமாக சமமாக இருக்கும் மற்றும் ஒப்பீட்டாளர் ஒரு சமநிலை நிலையில் உள்ளது. கட்டம் “0” வழியாகச் செல்லும்போது, ஒப்பீட்டாளர் DA1.1 இன் தலைகீழ் உள்ளீட்டில் பருப்பு வகைகள் தோன்றும், இது “பூஜ்ஜிய கண்டறிதல்” பாத்திரத்தை வகிக்கிறது, ஒப்பீட்டாளரை மாற்றுகிறது, இதன் விளைவாக வெளியீட்டில் செவ்வக ஒத்திசைவு பருப்புகள் உருவாக்கப்படுகின்றன. DA1.1 இன், மீண்டும் நிகழும் காலம் "0" " மூலம் கட்ட மாற்றத்துடன் கண்டிப்பாக இணைக்கப்பட்டுள்ளது
இயக்கக் கொள்கையை விளக்கும் ஓசிலோகிராம்கள் கீழே உள்ளன. 
மேலிருந்து கீழாக: KT1, KT2, KT3.
மல்டிசிம் 11 இல் சர்க்யூட் உருவகப்படுத்தப்பட்டது. இதோ திட்டக் கோப்பு. இந்த முனை எவ்வாறு செயல்படுகிறது என்பதை நீங்கள் பதிவிறக்கம் செய்து இயக்கலாம் மற்றும் பார்க்கலாம்.
அடுத்து, கடிகார துடிப்புகள் ஒரு டிரான்சிஸ்டர் சுவிட்ச் (C4, Q1) உடன் ஒரு ஒருங்கிணைப்பாளருக்கு அனுப்பப்படுகின்றன, அங்கு ஒரு sawtooth மின்னழுத்தம் உருவாக்கப்படுகிறது. கட்டம் "0" வழியாக செல்லும் தருணத்தில், கடிகார துடிப்பு டிரான்சிஸ்டர் Q1 ஐ திறக்கிறது, இது மின்தேக்கி C4 ஐ வெளியேற்றுகிறது. துடிப்பு சிதைந்த பிறகு, டிரான்சிஸ்டர் மூடப்பட்டு, அடுத்த கடிகார துடிப்பு வரும் வரை மின்தேக்கி சார்ஜ் செய்யப்படுகிறது, இதன் விளைவாக சேகரிப்பாளரில் Q1 ஏற்படுகிறது (ஆஸிலேட்டர் KT4). ஒரு நேர்கோட்டில் அதிகரிக்கும் மரக்கட்டை மின்னழுத்தம் உருவாகிறது, இது புலம்-விளைவு டிரான்சிஸ்டர் T1 இல் செய்யப்பட்ட நிலையான மின்னோட்ட ஜெனரேட்டரால் உறுதிப்படுத்தப்படுகிறது. 9V க்கு சமமான "saw" இன் அலைவீச்சு மின்தடையம் RP1 ஐ ஒழுங்கமைப்பதன் மூலம் அமைக்கப்படுகிறது. ஒப்பீட்டாளர் DA1.2 இன் நேரடி உள்ளீட்டிற்கு "பார்த்த" மின்னழுத்தம் வழங்கப்படுகிறது.
ஒப்பீட்டாளர் DA1.2 இன் தலைகீழ் உள்ளீட்டிற்கு குறிப்பு மின்னழுத்தம் வழங்கப்படுகிறது மற்றும் ஒப்பீட்டாளரின் தலைகீழ் உள்ளீட்டில் மரக்கட்டை மின்னழுத்தம் மின்னழுத்தத்தை மீறும் தருணத்தில், ஒப்பீட்டாளர் மாறுகிறது மற்றும் ஒப்பீட்டாளரின் வெளியீட்டில் ஒரு துடிப்பு உருவாகிறது (ஊசலாட்டம் KT4). துடிப்பு சங்கிலி R14, C6 மூலம் வேறுபடுகிறது மற்றும் டிரான்சிஸ்டர் Q2 இன் அடிப்பகுதிக்கு செல்கிறது. டிரான்சிஸ்டர் திறக்கிறது மற்றும் துடிப்பு மின்மாற்றி Tr1 ஆற்றல் தைரிஸ்டர்களுக்கான தொடக்க பருப்புகளை உருவாக்குகிறது. குறிப்பு மின்னழுத்தத்தை அதிகரிப்பதன் மூலம் (குறைப்பதன் மூலம்), CT5 மாற்றங்களில் பருப்புகளின் கடமை சுழற்சி.
இங்கே ஓசிலோகிராம்கள் உள்ளன. 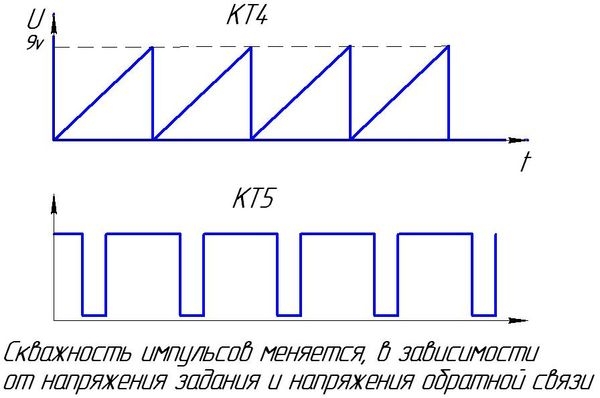
ஆனால் “தொடங்கு” பொத்தானை அழுத்தும் வரை KT5 இல் எந்த தூண்டுதல்களையும் காண மாட்டோம் - S1. பொத்தானை அழுத்தாத போது, சங்கிலி R12, D3 வழியாக பொதுவாக மூடப்பட்ட தொடர்புகள் S1 மூலம் +12V விநியோக மின்னழுத்தம் தலைகீழ் உள்ளீடு DA1.2 க்கு வழங்கப்படுகிறது மற்றும் சுமார் 11V க்கு சமமாக இருக்கும். இந்த மின்னழுத்தம் 9V இன் "சா" மின்னழுத்தத்தை விட அதிகமாக இருப்பதால், ஒப்பீட்டாளர் பூட்டப்பட்டுள்ளது மற்றும் தைரிஸ்டர்களைத் திறப்பதற்கான கட்டுப்பாட்டு பருப்புகள் உருவாக்கப்படவில்லை. விபத்துக்கள் மற்றும் இயந்திர செயலிழப்பைத் தடுக்க, ஆபரேட்டர் வேகக் கட்டுப்படுத்தியை "0" க்கு அமைக்கவில்லை என்றால், சுற்று ஒரு முடுக்கம் அலகு C5, R13 ஐ வழங்குகிறது, இது இயந்திரத்தின் மென்மையான முடுக்கத்திற்கு உதவுகிறது. “தொடக்க” பயன்முறையில், சுற்று பின்வருமாறு செயல்படுகிறது: நீங்கள் “தொடங்கு” பொத்தானை அழுத்தும்போது, பொதுவாக மூடிய தொடர்புகள் திறக்கப்பட்டு, சங்கிலியுடன் C5 மின்தேக்கி - “தரையில்”, R13, - C5 சீராக சார்ஜ் செய்யத் தொடங்குகிறது மற்றும் மின்னழுத்தம் இயக்கப்படுகிறது. மின்தேக்கியின் எதிர்மறை தட்டு சுமூகமாக பூஜ்ஜியமாக இருக்கும். அதே நேரத்தில், தலைகீழ் உள்ளீடு DA1.2 இல் உள்ள மின்னழுத்தம் குறிப்பு மின்னழுத்தத்தால் நிர்ணயிக்கப்பட்ட மதிப்புக்கு சீராக அதிகரிக்கிறது, மேலும் ஒப்பீட்டாளர் சக்தி தைரிஸ்டர்களுக்கான கட்டுப்பாட்டு பருப்புகளை உருவாக்கத் தொடங்குகிறார். சார்ஜிங் நேரம் C5, R13 மதிப்பீடுகளால் தீர்மானிக்கப்படுகிறது. என்ஜின் செயல்பாட்டின் போது வேகத்தில் திடீர் அதிகரிப்புகளைத் தவிர்ப்பதற்காக அதன் வேகத்தை மாற்ற வேண்டியது அவசியம் என்றால், சுற்று ஒரு "முடுக்கம்-பிரேக்கிங்" அலகு R21, C8, R22 ஐ வழங்குகிறது. குறிப்பு மின்னழுத்தம் அதிகரிக்கும் போது (குறைகிறது), மின்தேக்கி C8 சுமூகமாக சார்ஜ் செய்யப்படுகிறது (டிஸ்சார்ஜ் செய்யப்படுகிறது), இது பெருக்கியின் தலைகீழ் உள்ளீட்டில் மின்னழுத்தத்தின் கூர்மையான "எழுச்சியை" தடுக்கிறது, இதன் விளைவாக, இயந்திர வேகத்தில் கூர்மையான அதிகரிப்பு தடுக்கிறது.
இப்போது செயல்பாட்டின் கொள்கையைப் பார்ப்போம் வேகக் கட்டுப்படுத்தி.
கட்டுப்பாட்டு மண்டலத்தில் நிலையான இயந்திர வேகத்தை பராமரிக்க ரெகுலேட்டர் வடிவமைக்கப்பட்டுள்ளது. ரெகுலேட்டர் என்பது இரண்டு மின்னழுத்தங்களின் கூட்டுத்தொகையுடன் கூடிய வேறுபட்ட பெருக்கி ஆகும்: குறிப்பு மின்னழுத்தம் மற்றும் மின்னழுத்தம் கருத்து. குறிப்பு மின்னழுத்தம் மின்தடையம் RP1 மூலம் அமைக்கப்பட்டது மற்றும் வடிகட்டி R20, C8, R21 மூலம் வழங்கப்படுகிறது, இது ஒரே நேரத்தில் "முடுக்கம்-பிரேக்கிங்" அலகு செயல்பாடுகளை செய்கிறது, மேலும் op-amp ரெகுலேட்டர் DA1.3 இன் தலைகீழ் உள்ளீட்டிற்கு வழங்கப்படுகிறது. op-amp DA1.3 இன் வெளியீட்டில் குறிப்பு மின்னழுத்தம் அதிகரிக்கும் போது, வெளியீட்டு மின்னழுத்தம் நேர்கோட்டில் குறைகிறது.
ரெகுலேட்டரின் வெளியீட்டு மின்னழுத்தம் ஒப்பீட்டாளர் SIFU DA1.2 இன் தலைகீழ் உள்ளீட்டிற்கு வழங்கப்படுகிறது, அங்கு மரக்கட்டை மின்னழுத்த பருப்புகளுடன் சுருக்கமாக, இது தைரிஸ்டர்களின் கட்டுப்பாட்டு மின்முனைகளுக்குச் செல்லும் செவ்வக பருப்புகளின் தொடராக மாற்றப்படுகிறது. குறிப்பு மின்னழுத்தம் அதிகரிக்கும் போது (குறைகிறது), மின் அலகு வெளியீட்டில் வெளியீடு மின்னழுத்தம் அதிகரிக்கிறது (குறைகிறது).
இந்த வரைபடம் குறிப்பு மின்னழுத்தத்தில் இயந்திர வேகத்தின் சார்புநிலையைக் காட்டுகிறது. 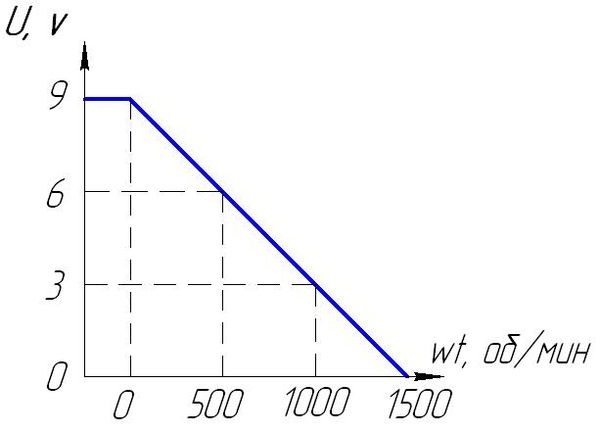
எஞ்சின் வேக மதிப்புகள் உதாரணமாக கொடுக்கப்பட்டுள்ளன.
DA1.3 ரெகுலேட்டரின் நேரடி உள்ளீட்டுடன் இணைக்கப்பட்டுள்ள மின்னழுத்த பிரிப்பான் R22, R23, பின்னூட்டம் உடைக்கப்படும் போது இயந்திர செயலிழப்பைத் தடுக்க உதவுகிறது (பின்னூட்டம் உடைந்தால், இயந்திரம் ஓவர் டிரைவிற்கு செல்கிறது).
இயக்கி இயக்கப்பட்டால், டகோஜெனரேட்டர் இயந்திர வேகத்திற்கு விகிதாசார மின்னழுத்தத்தை உருவாக்கத் தொடங்குகிறது. இந்த மின்னழுத்தம் துல்லியமான கண்டறிதல் DA1.4, DA2.1 ஒரு முழு அலை சுற்று பயன்படுத்தி கூடியிருந்த உள்ளீடு வழங்கப்படுகிறது. துல்லியமான கண்டறிதல் DA1.4, DA2.1 வெளியீட்டிலிருந்து எடுக்கப்பட்ட மின்னழுத்தம் வடிகட்டி C10, R30, R33 மூலம் அளவிடுதல் பின்னூட்ட பெருக்கி DA2.2 க்கு வழங்கப்படுகிறது. டேகோஜெனரேட்டரில் இருந்து வரும் பின்னூட்ட மின்னழுத்தத்தை சரிசெய்ய பெருக்கி பயன்படுத்தப்படுகிறது. op-amp DA2.2 இன் வெளியீட்டிலிருந்து மின்னழுத்தம். ரெகுலேட்டர் DA1.3 இன் உள்ளீடு மற்றும் பாதுகாப்பு சுற்று DA2.3 ஆகிய இரண்டிற்கும் வழங்கப்படுகிறது.
மின்தடை RP1 இயந்திர வேகத்தை அமைக்கிறது. இயந்திரம் சுமை இல்லாமல் இயங்கும் போது, அளவிடுதல் பெருக்கியின் வெளியீட்டில் உள்ள மின்னழுத்தம் op-amp DA1.3 இன் பின் 6 இல் உள்ள மின்னழுத்தத்தை விட குறைவாக இருக்கும். ≈ +5v, எனவே இயக்கி ஒரு சீராக்கியாக வேலை செய்கிறது. மோட்டார் தண்டு மீது சுமை அதிகரிக்கும் போது, டகோஜெனரேட்டரிலிருந்து பெறப்பட்ட மின்னழுத்தம் குறைகிறது, இதன் விளைவாக, அளவிடுதல் பெருக்கியின் வெளியீட்டில் இருந்து மின்னழுத்தம் குறைகிறது.
இந்த மின்னழுத்தம் op-amp DA1.3 இன் பின் 5 இல் உள்ள மின்னழுத்தத்தை விட குறைவாக இருக்கும்போது, இயக்கி தற்போதைய நிலைப்படுத்தல் மண்டலத்தில் நுழைகிறது. op-amp DA1.3 இன் இன்வெர்டிங் அல்லாத உள்ளீட்டில் மின்னழுத்தம் குறைவது அதன் வெளியீட்டில் மின்னழுத்தம் குறைவதற்கு வழிவகுக்கிறது, மேலும் இது DA1.2 இன் இன்வெர்டிங் பெருக்கியில் செயல்படுவதால், இது ஒரு பெரிய திறப்பு கோணத்திற்கு வழிவகுக்கிறது. தைரிஸ்டர்கள் மற்றும், இதன் விளைவாக, மோட்டார் ஆர்மேச்சரில் மின்னழுத்தம் அதிகரிக்கும்.
பாதுகாப்பு சுற்று
செட் எஞ்சின் வேகத்தை திடீரென மீறினால், விபத்திலிருந்து என்ஜினைப் பாதுகாக்க அதிக வேக பாதுகாப்பு வடிவமைக்கப்பட்டுள்ளது. op-amp DA2.3 ஐப் பயன்படுத்தி சுற்று இணைக்கப்பட்டுள்ளது, இது ஒப்பீட்டு சுற்றுக்கு ஏற்ப இணைக்கப்பட்டுள்ளது. பிரிப்பான் R36, R37, RP3 இலிருந்து குறிப்பு மின்னழுத்தம் ஒப்பீட்டாளரின் தலைகீழ் உள்ளீட்டிற்கு வழங்கப்படுகிறது. மின்தடை RP3 பாதுகாப்பு வாசலை அமைக்கிறது. அளவிடுதல் பெருக்கி DA2.2 இன் வெளியீட்டில் இருந்து மின்னழுத்தம் பாதுகாப்பு ஒப்பீட்டாளர் DA2.3 இன் நேரடி உள்ளீட்டிற்கு வழங்கப்படுகிறது. இயந்திர வேகம் மதிப்பிடப்பட்ட வேகத்தை மீறும் போது, ஒப்பீட்டாளரின் நேரடி உள்ளீட்டில் உள்ள மின்னழுத்தம் RP3 ஆல் நிர்ணயிக்கப்பட்ட பாதுகாப்பு அமைப்பின் வரம்பை மீறுகிறது - ஒப்பீட்டாளர் சுவிட்சுகள். சுற்றுவட்டத்தில் நேர்மறை பின்னூட்டம் இருப்பதால், R38 ஒப்பீட்டாளரை "தாழ்ப்பாளுக்கு" ஏற்படுத்துகிறது, மேலும் டையோடு VD12 இன் இருப்பு ஒப்பீட்டாளரை மீட்டமைப்பதைத் தடுக்கிறது. பாதுகாப்பு தூண்டப்படும் போது, VD14 டையோடு மூலம் பாதுகாப்பு ஒப்பீட்டாளரின் (≈ +11v) வெளியீட்டில் இருந்து வரும் மின்னழுத்தம் DA1.2 SIFU இன் தலைகீழ் உள்ளீடு 13 க்கு வழங்கப்படுகிறது, மேலும் பாதுகாப்பு மின்னழுத்தம் "saw" மின்னழுத்தத்தை மீறுவதால் (= 9v), கட்டுப்பாட்டு அலகுகளுக்கு கட்டுப்பாட்டு பருப்புகளை வழங்குவது உடனடியாக தடைசெய்யப்பட்ட தைரிஸ்டர் மின்முனைகள். பாதுகாப்பு ஒப்பீட்டாளர் DA2.3 வெளியீட்டின் மின்னழுத்தம் டிரான்சிஸ்டர் VT4 ஐத் திறக்கிறது, இது ரிலே P1.1 ஐ இயக்குகிறது மற்றும் VL1 LED ஒளி, அவசரநிலைக்கு சமிக்ஞை செய்கிறது. டிரைவை முழுவதுமாக செயலிழக்கச் செய்வதன் மூலம் மட்டுமே நீங்கள் பாதுகாப்பை அகற்ற முடியும், மேலும் 5 - 10 வினாடிகள் இடைநிறுத்தப்பட்ட பிறகு, அதை மீண்டும் இயக்கவும்.
கட்டுப்பாட்டு அலகு சக்தி பகுதி.
சக்தி பிரிவு வரைபடம் கீழே காட்டப்பட்டுள்ளது 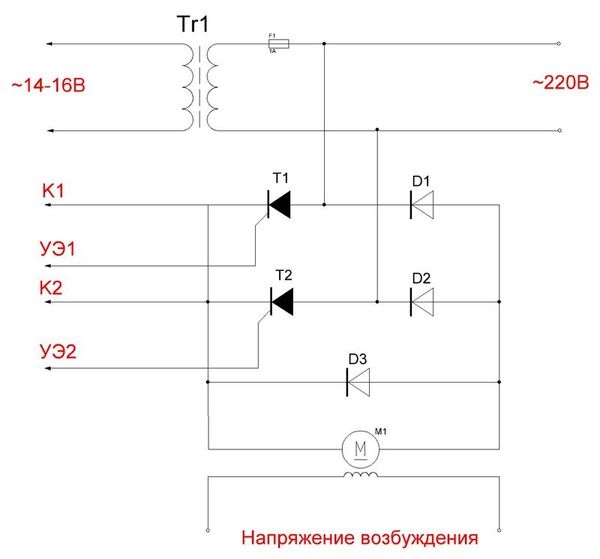
டிரான்ஸ்ஃபார்மர் Tr1 கட்டுப்பாட்டு அலகு சுற்றுக்கு சக்தி அளிக்க வடிவமைக்கப்பட்டுள்ளது. கட்டுப்படுத்தப்பட்ட ரெக்டிஃபையர் ஒரு அரை-பாலம் சமச்சீர் சுற்று பயன்படுத்தி கூடியது மற்றும் இரண்டு ஆற்றல் டையோட்கள் D1, D2 ஆகியவற்றைக் கொண்டுள்ளது.
மற்றும் இரண்டு சக்தி தைரிஸ்டர்கள் T1, T2, மற்றும் ஒரு பாதுகாப்பு டையோடு D3. புல முறுக்கு அதன் சொந்த தனி மின்மாற்றி மற்றும் ரெக்டிஃபையர் மூலம் இயக்கப்படுகிறது.
இயந்திரத்தில் டகோஜெனரேட்டர் இல்லை என்றால், வேகத்தைக் கட்டுப்படுத்துவதற்கான பின்னூட்டம் பின்வருமாறு செய்யப்படலாம்:
1. கட்டுப்படுத்தப்பட்ட ரெக்டிஃபையரின் மின்சுற்றுக்கு இணைக்கப்பட்ட தற்போதைய மின்மாற்றியைப் பயன்படுத்தவும் 
தற்போதைய மின்மாற்றி பயன்படுத்தப்பட்டால், கட்டுப்பாட்டு அலகு வரைபடத்தில் ஜம்பர் P1 ஐ வைக்கவும்
1-3 நிலைக்கு, இது அவசியம், ஏனெனில் சுமை அதிகரிக்கும் போது, ஆர்மேச்சர் மின்னோட்டம் அதிகரிக்கும், எனவே தற்போதைய மின்மாற்றியிலிருந்து அகற்றப்பட்ட மின்னழுத்தமும் அதிகரிக்கும், எனவே பின்னூட்ட மின்னழுத்தம் தலைகீழாகப் பயன்படுத்தப்பட வேண்டும்.
DA1.3 சிப்பின் வெளியீடு. நீங்கள் ஒரு நிலையான தற்போதைய ஷன்ட்டையும் நிறுவலாம், ஆனால் மோட்டார் ஆர்மேச்சர் சர்க்யூட்டில், ரெக்டிஃபையருக்குப் பிறகு, அதிலிருந்து பின்னூட்ட சமிக்ஞையை அகற்றவும்.
2. ஆர்மேச்சர் வோல்டேஜ் சென்சார் பயன்படுத்தவும். வரைபடம் கீழே காட்டப்பட்டுள்ளது. 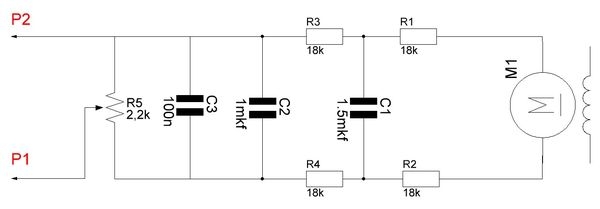
ஆர்மேச்சர் வோல்டேஜ் சென்சார் ஒரு வடிகட்டி-பிரிப்பான் மற்றும் மின்சார மோட்டாரின் ஆர்மேச்சர் டெர்மினல்களுடன் நேரடியாக இணைக்கப்பட்டுள்ளது. இயக்கி பின்வருமாறு கட்டமைக்கப்பட்டுள்ளது. மின்தடையங்கள் "பணி" மற்றும் "அளவிடுதல் Uoc" ஆகியவை நடுத்தர நிலைக்கு அமைக்கப்பட்டுள்ளன. ஆர்மேச்சர் மின்னழுத்த சென்சாரின் மின்தடையம் R5 குறைந்த "தரையில்" வைக்கப்படுகிறது. நாங்கள் இயக்ககத்தை இயக்கி, மோட்டார் ஆர்மேச்சரில் மின்னழுத்தத்தை தோராயமாக 110 வோல்ட்டுகளாக அமைக்கிறோம். மோட்டார் ஆர்மேச்சரில் மின்னழுத்தத்தைக் கட்டுப்படுத்துவதன் மூலம், மின்தடையம் R5 ஐ சுழற்றத் தொடங்குகிறோம். ஒரு குறிப்பிட்ட கட்டுப்பாட்டு கட்டத்தில், ஆர்மேச்சரில் மின்னழுத்தம் குறையத் தொடங்கும், இது பின்னூட்டம் வேலை செய்யத் தொடங்கியது என்பதைக் குறிக்கிறது.
இப்போது கட்டுப்பாட்டு அலகு வடிவமைப்பு மற்றும் சரிசெய்தலுக்கு செல்லலாம்.
கட்டுப்பாட்டு அலகு அச்சிடப்பட்ட சர்க்யூட் போர்டில் (பிசிபி கோப்பு) செய்யப்பட்டது. 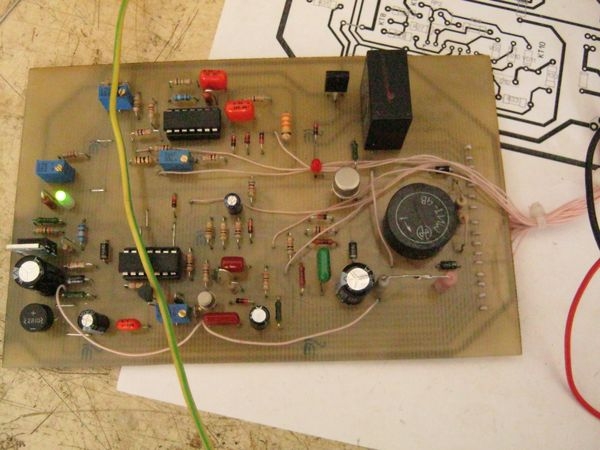

பழுதுபார்க்கும் போது எளிதாக அகற்றுவதற்காக பலகை MGTF கம்பி மூலம் இணைப்பியுடன் இணைக்கப்பட்டுள்ளது.
அமைப்புகள்
அமைப்பின் போது, சுவரில் பொருத்தப்பட்ட நிறுவலைப் பயன்படுத்தி சக்தி பகுதி கூடியது, மேலும் ஒரு வழக்கமான ஒளிரும் விளக்கு ஒரு சுமையாக பயன்படுத்தப்பட்டது. 
செயல்பாட்டு பெருக்கிகள் DA1, DA2 இல் விநியோக மின்னழுத்தங்கள் மற்றும் விநியோக மின்னழுத்தத்தை சரிபார்த்து அமைப்பைத் தொடங்குகிறோம். சாக்கெட்டுகளில் மைக்ரோ சர்க்யூட்களை நிறுவுவது நல்லது. பின்னர் KT1, KT2, KT3 ஆகிய கட்டுப்பாட்டுப் புள்ளிகளில் அலைக்கற்றைகளை கண்காணிக்கிறோம் (இந்த புள்ளிகளில் உள்ள அலைக்கற்றைகள் SIFU இன் விளக்கத்தின் தொடக்கத்தில் கொடுக்கப்பட்டுள்ளன). இப்போது, நாம் Oscilloscope ஐ கட்டுப்பாட்டு புள்ளி KT4 இல் வைக்கிறோம். மேலே உள்ள ஓசிலோகிராமில் உள்ளதைப் போல, மரத்தூள் பருப்புகள் இருக்க வேண்டும் (இந்த நேரத்தில் "தொடங்கு" பொத்தான் திறந்திருக்க வேண்டும்). டிரிம்மர் மின்தடையம் RP1 ஐப் பயன்படுத்தி, 9 வோல்ட்டுக்கு "பார்த்த" ஊஞ்சலை அமைக்க வேண்டியது அவசியம், ஏனெனில் இது தீர்மானிக்கிறது மேலும் வேலைதிட்டங்கள். புலம்-விளைவு டிரான்சிஸ்டர்களின் அளவுருக்களில் பரவல் மிகவும் குறிப்பிடத்தக்கதாக இருப்பதால், ஒருவேளை RP1 இன் சரிசெய்தல் வரம்பு போதுமானதாக இருக்காது, பின்னர் மின்தடையம் R10 இன் மதிப்பைத் தேர்ந்தெடுப்பதன் மூலம், விரும்பிய வரம்பை அடையலாம். கட்டுப்பாட்டு புள்ளி KT3 இல், துடிப்பு கால அளவு 1.5 - 1.8ms ஆக இருக்க வேண்டும், இல்லையெனில், தேவையான கால அளவை அடைய மின்தடையம் R4 (குறைப்பை நோக்கி) தேர்ந்தெடுக்கவும்.
கட்டுப்பாட்டுப் புள்ளி KT5 இல் RR1 ரெகுலேட்டரைச் சுழற்றுவதன் மூலம், RR1 ஸ்லைடர் கீழ் நிலையில் இருக்கும்போது, பருப்புகளின் கடமைச் சுழற்சியில் அதிகபட்சம் முதல் முழுமையாக காணாமல் போகும் வரையிலான மாற்றத்தைச் சரிபார்க்கவும். இந்த வழக்கில், மின் அலகுடன் இணைக்கப்பட்ட ஒளி விளக்கின் பிரகாசம் மாற வேண்டும்.
அடுத்து, கட்டுப்பாட்டு அலகு இயந்திரம் மற்றும் டகோஜெனரேட்டருடன் இணைக்கிறோம். நாங்கள் அதை RR1 ரெகுலேட்டருடன் அமைத்துள்ளோம்
ஆர்மேச்சர் மின்னழுத்தம் சுமார் 40-50 வோல்ட் ஆகும். மின்தடை RP3 நடுத்தர நிலைக்கு அமைக்கப்பட வேண்டும். மோட்டார் ஆர்மேச்சரில் மின்னழுத்தத்தைக் கட்டுப்படுத்துவதன் மூலம், மின்தடையம் RP3 ஐ சுழற்றத் தொடங்குகிறோம். ஒரு குறிப்பிட்ட கட்டுப்பாட்டு கட்டத்தில், ஆர்மேச்சரில் உள்ள மின்னழுத்தம் குறையத் தொடங்கும், இது பின்னூட்டம் வேலை செய்யத் தொடங்கியது என்பதைக் குறிக்கிறது. பரிசோதனை செய்ய விரும்புவோருக்கு: டிரைவின் விறைப்புத்தன்மையை அதிகரிக்க, நீங்கள் எதிர்ப்பை R24 ஐ அதிகரிக்கலாம், இதன் மூலம் ரெகுலேட்டரின் ஆதாயத்தை அதிகரிக்கலாம் அல்லது மின்தடையம் R32 ஐ அதிகரிக்கலாம்.
மோட்டார் ஆர்மேச்சர் தற்போதைய பின்னூட்டம் பயன்படுத்தப்பட்டால்.
இதற்கு, மேலே குறிப்பிட்டுள்ளபடி, மின்சுற்றில் சேர்க்கப்பட்டுள்ள தற்போதைய மின்மாற்றி தேவை
கட்டுப்படுத்தப்பட்ட திருத்தி. தற்போதைய மின்மாற்றி அளவுத்திருத்த வரைபடம் கீழே கொடுக்கப்பட்டுள்ளது. மின்தடையைத் தேர்ந்தெடுப்பதன் மூலம், மின்மாற்றி வெளியீட்டில் ≈ 2 ÷ 2.5v இன் மாற்று மின்னழுத்தத்தைப் பெறவும். சுமை ஆற்றல் RN1 இன்ஜின் சக்தியுடன் பொருந்த வேண்டும். 
கவனம்! சுமை மின்தடை இல்லாமல் தற்போதைய மின்மாற்றியை இயக்க வேண்டாம்.
தற்போதைய மின்மாற்றியை பின்னூட்ட சுற்று P1 மற்றும் P2 உடன் இணைக்கிறோம். "ரெகுலேட்டரை" அமைக்கும் போது, பாதுகாப்பின் தவறான தூண்டுதலைத் தடுக்க D12 டையோடை அன்சோல்டர் செய்வது நல்லது.
KT8, KT9, KT10 ஆகிய கட்டுப்பாட்டுப் புள்ளிகளில் உள்ள அலைக்கற்றைகள் கீழே உள்ள படத்தில் உள்ளது போல் இருக்க வேண்டும். 
மேலும் அமைப்புகள் டகோஜெனரேட்டரைப் பயன்படுத்துவதைப் போலவே இருக்கும்.
மோட்டார் ஆர்மேச்சர் மின்னழுத்த கருத்து பயன்படுத்தப்பட்டால்.
மேலே குறிப்பிட்டுள்ளபடி, நீங்கள் ஆர்மேச்சர் வோல்டேஜ் பின்னூட்டத்தைப் பயன்படுத்தலாம், ஒரு ஆர்மேச்சர் வோல்டேஜ் சென்சார் கூடியது. கட்டுப்பாட்டு அலகு பின்வருமாறு கட்டமைக்கப்பட்டுள்ளது. மின்தடையங்கள் "பணி" மற்றும் "அளவிடுதல் Uoc" ஆகியவை நடுத்தர நிலைக்கு அமைக்கப்பட்டுள்ளன. ஆர்மேச்சர் மின்னழுத்த சென்சாரின் மின்தடையம் R5 குறைந்த "தரையில்" வைக்கப்படுகிறது. நாங்கள் இயக்ககத்தை இயக்கி, மோட்டார் ஆர்மேச்சரில் மின்னழுத்தத்தை தோராயமாக 110 வோல்ட்டுகளாக அமைக்கிறோம். மோட்டார் ஆர்மேச்சரில் மின்னழுத்தத்தைக் கட்டுப்படுத்துவதன் மூலம், மின்தடையம் R5 ஐ சுழற்றத் தொடங்குகிறோம். ஒரு குறிப்பிட்ட கட்டுப்பாட்டு கட்டத்தில், ஆர்மேச்சரில் உள்ள மின்னழுத்தம் குறையத் தொடங்கும், இது பின்னூட்டம் வேலை செய்யத் தொடங்கியது என்பதைக் குறிக்கிறது.
இந்த கட்டுப்பாட்டு அலகு ஒரு போரிங் இயந்திரத்திற்காக தயாரிக்கப்பட்டது. இந்த அசுரனின் புகைப்படம் இதோ 

இந்த இயந்திரத்தில், டேபிளை நகர்த்துவதற்கான டிசி மோட்டாரைக் கட்டுப்படுத்தும் மின்சார இயந்திர பெருக்கி தோல்வியடைந்தது.
இங்கே ஒரு மின்சார இயந்திர பெருக்கி உள்ளது. 
அதற்கு பதிலாக இந்த கட்டுப்பாட்டு அலகு உருவாக்கப்பட்டது.
DC மோட்டாரின் புகைப்படம் இங்கே உள்ளது. 
கட்டுப்பாட்டு அலகு ஒரு இன்சுலேடிங் தளத்தில் கூடியது, அங்கு அனைத்து முக்கிய கூறுகளும் அமைந்துள்ளன. 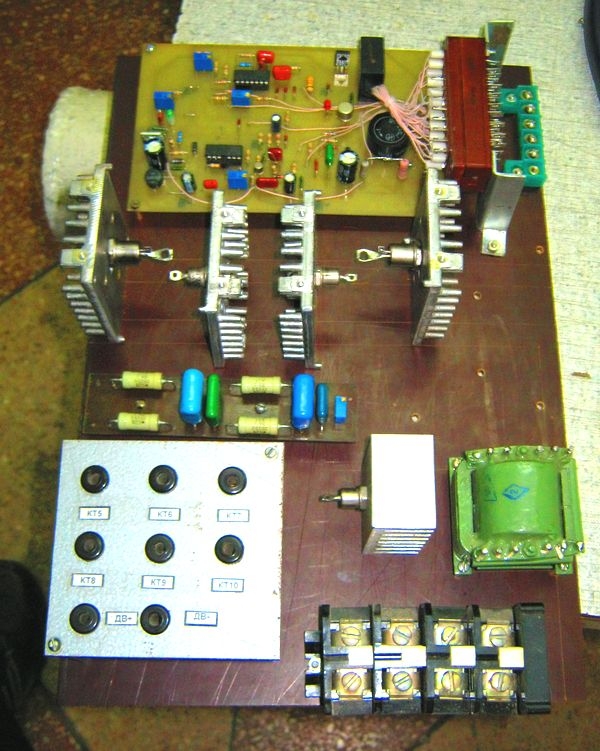
பவர் டையோட்கள் மற்றும் தைரிஸ்டர்கள் வெப்ப மூழ்கிகளில் நிறுவப்பட்டுள்ளன. இணைப்பிகள் கொண்ட ஒரு குழுவும் செய்யப்பட்டது, அங்கு சுற்று கட்டுப்பாட்டு புள்ளிகளிலிருந்து சமிக்ஞைகள் வெளியிடப்பட்டன. இயந்திரத்தில் நேரடியாக அமைப்பதற்கும் பழுதுபார்ப்பதற்கும் இது செய்யப்பட்டது.
இயந்திரத்தின் சக்தி அமைச்சரவையில் ஏற்றப்பட்ட கட்டுப்பாட்டு அலகு இங்கே உள்ளது 


மின் அமைச்சரவையின் மறுபுறத்தில் ஒரு சிறிய கட்டுப்பாட்டு குழு நிறுவப்பட்டது. 
இது கொண்டுள்ளது:
- யூனிட்டை இயக்குவதற்கான சுவிட்சை மாற்றவும்
- இயக்க முறைமை மாற்று சுவிட்ச். இயந்திர அட்டவணையின் நிறுவல் இயக்கங்களுக்கு, துல்லியமான கட்டுப்பாடு மற்றும் புரட்சிகளின் உறுதிப்படுத்தல் தேவையில்லை என்பதால், இந்த நேரத்தில் பின்னூட்ட சுற்று புறக்கணிக்கப்படுகிறது.
- புரட்சிகளின் எண்ணிக்கையை சரிசெய்வதற்கான கைப்பிடிகள். இரண்டு மாறி மின்தடையங்கள் வழங்கப்பட்டன, ஒன்று கரடுமுரடான சரிசெய்தலுக்காக, இரண்டாவது - பல திருப்பம் - பகுதியின் கடினமான மற்றும் நன்றாக சலிப்பின் போது தேவையான வேகத்தை துல்லியமாக அமைப்பதற்காக.
ஆர்வமுள்ளவர்களுக்கு, இயந்திரம் செயல்பாட்டில் உள்ள வீடியோ கீழே உள்ளது. முதலில், துளை துளை காட்டப்பட்டுள்ளது எஃகு தட்டு 20 மிமீ தடிமன். இயந்திர டேபிள் ஃபீட் ஸ்க்ரூ எந்த அதிர்வெண்ணில் சுழல்கிறது என்பது காண்பிக்கப்படும். இந்த வேகத்தில், பகுதி கட்டருக்கு ஊட்டப்படுகிறது, மேலும் ஃபீட் ஸ்க்ரூவின் சுழற்சியின் இந்த வேகம் டிசி மோட்டாரால் வழங்கப்படுகிறது, இதற்காக, உண்மையில், இவை அனைத்தும் செய்யப்பட்டன.
கட்டுப்பாட்டு அலகு சிறப்பாக செயல்பட்டது, தோல்விகள் அல்லது விபத்துக்கள் எதுவும் இல்லை.
ஒரு பரந்த அளவிலான மின்சார மோட்டாரின் வேகம் மற்றும் முறுக்குவிசையின் மென்மையான மற்றும் துல்லியமான கட்டுப்பாடு தேவைப்படும்போது, DC மோட்டார் கட்டுப்பாட்டு சுற்று தேவைப்படுகிறது.
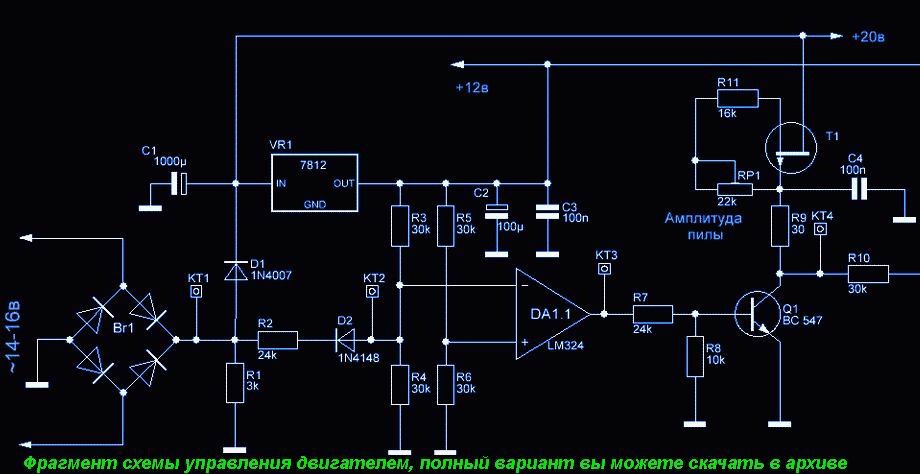
SIFU - பல்ஸ்-ஃபேஸ் கண்ட்ரோல் சிஸ்டம் நெட்வொர்க் மின்னழுத்தத்தின் சைனூசாய்டல் மாற்றத்தை செவ்வக பருப்புகளின் வரிசையாக மாற்றுகிறது, இது சக்தி தைரிஸ்டர்களின் கட்டுப்பாட்டு முனையங்களுக்கு பாயும். சுற்று இயக்கப்படும் போது, 14 - 16 வோல்ட் மாற்று மின்னழுத்தம் பிரிட்ஜ் ரெக்டிஃபையருக்குச் சென்று துடிப்பு மின்னழுத்தமாக மாற்றப்படுகிறது, இது கட்டமைப்பை இயக்குவதற்கு மட்டுமல்லாமல், சாதனத்தின் செயல்பாட்டை ஒத்திசைக்கவும் உதவுகிறது. டயோடு D2 மின்தேக்கி C1 இன் பருப்புகளை மென்மையாக்காது. பின்னர் பருப்புகள் LM324 செயல்பாட்டு பெருக்கியில் செய்யப்பட்ட "ஜீரோ டிடெக்டரை" பின்பற்றுகின்றன, உறுப்பு DA1.1, ஒப்பீட்டு பயன்முறையில் இயக்கப்பட்டது. துடிப்புகள் இல்லை என்றாலும், op-amp இன் நேரடி மற்றும் தலைகீழ் உள்ளீடுகளில் உள்ள மின்னழுத்தங்கள் தோராயமாக ஒரே மாதிரியாக இருக்கும் மற்றும் ஒப்பீட்டாளர் சமநிலையில் இருக்கும்.
ஒரு சைனூசாய்டு பூஜ்ஜியப் புள்ளியைக் கடக்கும்போது, ஒப்பீட்டாளரின் தலைகீழ் உள்ளீட்டில் பருப்பு வகைகள் தோன்றும், ஒப்பீட்டாளரை மாற்றுகின்றன, இதன் விளைவாக DA1.1 இன் வெளியீட்டில் செவ்வக ஒத்திசைவு பருப்புகள் உருவாக்கப்படுகின்றன, இதன் மறுநிகழ்வு காலம் பூஜ்ஜியத்தைப் பொறுத்தது. புள்ளி. இயக்கக் கொள்கையைப் புரிந்து கொள்ள ஓசிலோகிராம்களைப் பார்க்கவும். மேலிருந்து கீழாக: KT1, KT2, KT3.
DC மோட்டார் கட்டுப்பாட்டு சுற்று திட்டத்தில் உருவகப்படுத்தப்பட்டது. உடன் காப்பகப்படுத்தப்பட்டது முழு பதிப்புகேள்விக்குரிய வடிவமைப்பில் இந்தத் திட்டத்திற்கான திட்டக் கோப்பு உள்ளது. அமெச்சூர் ரேடியோ வீட்டில் தயாரிக்கப்பட்ட தயாரிப்பை இணைக்கத் தொடங்குவதற்கு முன், நீங்கள் அதைத் திறந்து, இந்த அலகு எவ்வாறு செயல்படுகிறது என்பதைப் பார்க்கவும், அதன்படி டிசி மோட்டாரின் கட்டுப்பாட்டைப் பற்றிய இறுதி முடிவுகளை எடுக்கவும்.
மீண்டும் வேலைக்குச் செல்வோம் - கடிகார பருப்புகள் ஒரு டிரான்சிஸ்டர் சுவிட்ச் (C4, Q1) உடன் ஒருங்கிணைப்பாளருக்குச் செல்கின்றன, அங்கு ஒரு மரக்கட்டை மின்னழுத்தம் உருவாக்கப்படுகிறது. கட்டம் பூஜ்ஜியப் புள்ளியைக் கடந்து செல்லும் தருணத்தில், கடிகார துடிப்பு முதல் டிரான்சிஸ்டரைத் திறக்கிறது, இது கொள்ளளவு C4 ஐ வெளியேற்றுகிறது. துடிப்பு சிதைந்த பிறகு, டிரான்சிஸ்டர் அணைக்கப்பட்டு, அடுத்த கடிகார துடிப்பு வரும் வரை கொள்ளளவு சார்ஜ் செய்யப்படுகிறது, இதன் விளைவாக டிரான்சிஸ்டர் சேகரிப்பாளரில் (ஒசிலோகிராம் KT4) நேரியல் அதிகரிக்கும் மரக்கட்டை மின்னழுத்தம் உருவாகிறது, இது நிலையான மின்னோட்ட ஜெனரேட்டரால் உறுதிப்படுத்தப்படுகிறது. யூனிபோலார் டிரான்சிஸ்டர் T1.
சுமார் 9 வோல்ட் மரத்தூள் மின்னழுத்தத்தின் வீச்சு எதிர்ப்பை RP1 ஐ ஒழுங்கமைப்பதன் மூலம் அமைக்கப்படுகிறது. இந்த மின்னழுத்தம் ஒப்பீட்டாளர் DA1.2 இன் நேரடி உள்ளீட்டில் பயன்படுத்தப்படுகிறது. குறிப்பு மின்னழுத்தம் ஒப்பீட்டாளர் DA1.2 இன் தலைகீழ் உள்ளீட்டைப் பின்பற்றுகிறது மற்றும் மரக்கட்டை மின்னழுத்தத்தின் வீச்சு தலைகீழ் உள்ளீட்டில் மின்னழுத்தத்தை மீறும் தருணத்தில், ஒப்பீட்டாளர் எதிர் நிலைக்கு மாற்றப்பட்டு அதன் வெளியீட்டில் ஒரு துடிப்பு உருவாக்கப்படுகிறது (ஒசிலோகிராம் KT4 )
துடிப்பானது செயலற்ற ரேடியோ கூறுகள் R14, C6 ஆகியவற்றின் சங்கிலி மூலம் வேறுபடுத்தப்படுகிறது மற்றும் இரண்டாவது இருமுனை டிரான்சிஸ்டரின் அடிப்பகுதியைப் பின்தொடர்கிறது, இதன் காரணமாக, துடிப்பு மின்மாற்றியில் சக்தி தைரிஸ்டர்களின் துடிப்புகள் திறக்கப்படுகின்றன மற்றும் திறக்கப்படுகின்றன. குறிப்பு மின்னழுத்தத்தை அதிகரிப்பதன் மூலம் அல்லது குறைப்பதன் மூலம், CT5 இல் பருப்புகளின் கடமை சுழற்சியை நீங்கள் சரிசெய்யலாம்.
ஆனால் நாம் S1 மாற்று சுவிட்சை அழுத்தும் வரை KT5 அலைக்கற்றையில் எந்த பருப்புகளையும் காண மாட்டோம். அது அழுத்தப்படாதபோது, முன் தொடர்புகள் S1 மூலம் R12, D3 மூலம் +12V விநியோக மின்னழுத்தம் தலைகீழ் உள்ளீடு DA1.2 க்கு செல்கிறது. இந்த மின்னழுத்தம் "பார்த்த" மின்னழுத்தத்தை விட அதிகமாக இருப்பதால், ஒப்பீட்டாளர் மூடுகிறார் மற்றும் தைரிஸ்டர்களைத் திறக்கும் பருப்பு வகைகள் உருவாக்கப்படவில்லை.
அவசரகால சூழ்நிலைகள் மற்றும் மின்சார மோட்டருக்கு சேதம் ஏற்படுவதைத் தடுக்க, வேகக் கட்டுப்படுத்தி "0" க்கு அமைக்கப்படவில்லை என்றால், மின்சுற்று C5, R13 கூறுகளில் முடுக்கம் அலகு உள்ளது, இது இயந்திரத்தின் மென்மையான முடுக்கத்திற்காக வடிவமைக்கப்பட்டுள்ளது.
மாற்று சுவிட்ச் S1 அழுத்தும் போது, தொடர்புகள் திறக்கப்படுகின்றன மற்றும் கொள்ளளவு C5 சீராக சார்ஜ் செய்யத் தொடங்குகிறது, மேலும் மின்தேக்கியின் எதிர்மறை தட்டில் மின்னழுத்தம் பூஜ்ஜியத்தை நெருங்குகிறது. தலைகீழ் உள்ளீடு DA1.2 இல் உள்ள மின்னழுத்தம் குறிப்பு மின்னழுத்தத்தின் மதிப்பிற்கு அதிகரிக்கிறது, மேலும் ஒப்பீட்டாளர் சக்தி தைரிஸ்டர்களைத் திறக்க பருப்புகளை உருவாக்கத் தொடங்குகிறார். சார்ஜிங் நேரம் ரேடியோ கூறுகள் C5, R13 மூலம் தீர்மானிக்கப்படுகிறது.
என்ஜின் செயல்பாட்டின் போது அதன் வேகத்தை சரிசெய்ய வேண்டியது அவசியம் என்றால், ஒரு முடுக்கம் மற்றும் பிரேக்கிங் அலகு R21, C8, R22 சுற்றுக்கு சேர்க்கப்பட்டுள்ளது. இலக்கு மின்னழுத்தம் அதிகரிக்கும் போது அல்லது குறையும் போது, கொள்ளளவு C8 சீராக சார்ஜ் செய்யப்படுகிறது அல்லது வெளியேற்றப்படுகிறது, இது தலைகீழ் உள்ளீட்டில் மின்னழுத்தத்தின் கூர்மையான "எழுச்சியை" நீக்குகிறது, இதன் விளைவாக, இயந்திர வேகத்தில் கூர்மையான அதிகரிப்பு நீக்குகிறது.
ஒழுங்குமுறை மண்டலத்தில் நிலையான வேகத்தை பராமரிக்க சீராக்கி பயன்படுத்தப்படுகிறது. ரெகுலேட்டர் இரண்டு மின்னழுத்தங்களின் கூட்டுத்தொகையுடன் வேறுபட்ட பெருக்கியின் அடிப்படையில் செய்யப்படுகிறது: குறிப்பு மற்றும் கருத்து. குறிப்பு மின்னழுத்தம் எதிர்ப்பு RP1 மூலம் உருவாகிறது மற்றும் R20, C8, R21 கூறுகள் மீது வடிகட்டி மூலம் பின்தொடர்கிறது, இது முடுக்கம் மற்றும் குறைப்பு அலகு போல் செயல்படுகிறது, மேலும் இது தலைகீழ் உள்ளீடு DA1.3 க்கு வழங்கப்படுகிறது. வெளியீடு DA1.3 இல் குறிப்பு மின்னழுத்தம் அதிகரிக்கும் போது, வெளியீட்டு மின்னழுத்தம் நேர்கோட்டில் குறைகிறது.
ரெகுலேட்டரின் வெளியீட்டு மின்னழுத்தம் ஒப்பீட்டாளர் SIFU DA1.2 இன் தலைகீழ் உள்ளீட்டைப் பின்பற்றுகிறது, அங்கு "சா" பருப்புகளுடன் சுருக்கமாக, இது தைரிஸ்டர்களின் மின்முனைகளுக்கு பயணிக்கும் செவ்வக பருப்புகளின் தொடராக மாறும். குறிப்பு மின்னழுத்தம் அதிகரிக்கும் அல்லது குறையும் போது, மின் அலகு வெளியீட்டில் வெளியீடு மின்னழுத்தம் அதிகரிக்கிறது அல்லது குறைகிறது. குறிப்பு மின்னழுத்தத்தில் இயந்திர வேகத்தின் சார்புநிலையை வரைபடம் காட்டுகிறது.
DA1.3 ரெகுலேட்டரின் நேரடி உள்ளீட்டுடன் இணைக்கப்பட்ட மின்தடையங்கள் R22, R23 இல் உள்ள மின்னழுத்த பிரிப்பான், பின்னூட்டம் உடைக்கப்படும்போது அவசரகால சூழ்நிலையை அகற்ற வடிவமைக்கப்பட்டுள்ளது.
இயக்கி இயக்கப்படும் போது, டகோஜெனரேட்டர் மின்சார மோட்டாரின் வேகத்திற்கு விகிதாசார மின்னழுத்தத்தை உருவாக்குகிறது. இந்த மின்னழுத்தம் ஒரு உன்னதமான முழு அலை சுற்றுக்கு ஏற்ப கட்டப்பட்ட துல்லியமான கண்டறிதல் DA1.4, DA2.1 இன் உள்ளீட்டிற்கு செல்கிறது. அதன் வெளியீட்டில் இருந்து மின்னழுத்தம் ஒரு வடிகட்டி மூலம் பின்தொடர்கிறது செயலற்ற கூறுகள் DA2.2 OS அளவிடுதல் பெருக்கிக்கு C10, R30, R33. டேகோஜெனரேட்டரிலிருந்து வரும் OS மின்னழுத்தத்தை சரிசெய்ய பெருக்கி பயன்படுத்தப்படுகிறது. DA2.2 வெளியீட்டில் இருந்து மின்னழுத்தம் DA1.3 உள்ளீடு மற்றும் DA2.3 பாதுகாப்பு சுற்றுக்கு செல்கிறது.
எதிர்ப்பு RP1 மோட்டார் வேகத்தை உருவாக்குகிறது. சுமை இல்லாமல் செயல்படும் போது, அளவிடுதல் பெருக்கியின் வெளியீட்டில் உள்ள மின்னழுத்தம் DA1.3 இன் ஆறாவது முள் மின்னழுத்தத்தை விட குறைவாக உள்ளது, எனவே இயக்கி ஒரு சீராக்கியாக செயல்படுகிறது.
தண்டு மீது சுமை அதிகரிக்கும் போது, டகோஜெனரேட்டரில் இருந்து அகற்றப்பட்ட மின்னழுத்தம் குறைகிறது, இதன் விளைவாக, அளவிடுதல் பெருக்கியின் வெளியீட்டில் இருந்து மின்னழுத்தம் குறைகிறது. இந்த நிலை op-amp DA1.3 இன் லெக் 5 ஐ விட குறைவாக இருக்கும்போது, இயக்கி தற்போதைய நிலைப்படுத்தல் மண்டலத்தில் நுழையும். தலைகீழ் அல்லாத உள்ளீட்டில் மின்னழுத்தத்தைக் குறைப்பது DA1.3 அதன் வெளியீட்டில் உள்ள மின்னழுத்தத்தைக் குறைக்கும், மேலும் இது DA1.2 இன்வெர்டிங் பெருக்கியில் வேலை செய்வதால், இது தைரிஸ்டர்களின் தொடக்கக் கோணத்தை அதிகரிக்கும், எனவே, தைரிஸ்டர்களின் தொடக்கக் கோணத்தை அதிகரிக்கும். மின்சார மோட்டாரின் ஆர்மேச்சர்.
ஓவர்ஸ்பீட் பாதுகாப்பு ஒரு செயல்பாட்டு பெருக்கி DA2.3 இல் கூடியது, இது ஒரு ஒப்பீட்டாளராக இணைக்கப்பட்டுள்ளது. அதன் தலைகீழ் உள்ளீடு பிரிப்பான் R36, R37, RP3 இலிருந்து குறிப்பு மின்னழுத்தத்தைப் பெறுகிறது. எதிர்ப்பு RP3 பாதுகாப்பு செயல்பாட்டின் அளவை ஒழுங்குபடுத்துகிறது. DA2.2 பெருக்கியின் வெளியீட்டில் இருந்து மின்னழுத்தம் DA2.3 இன் நேரடி உள்ளீட்டிற்கு செல்கிறது.
வேகமானது பெயரளவு மதிப்பை மீறும் போது, ஒப்பீட்டாளரின் நேரடி உள்ளீடு, எதிர்ப்பு RP3 மற்றும் ஒப்பீட்டாளர் சுவிட்சுகளால் நிர்ணயிக்கப்பட்ட பாதுகாப்பு அமைப்பின் வரம்பை மீறுகிறது.
சுற்றுவட்டத்தில் நேர்மறையான பின்னூட்டம் இருப்பதால், R38 ஒப்பீட்டாளரை "தாழ்ப்பாளை" ஏற்படுத்துகிறது, மேலும் டையோடு VD12 ஒப்பீட்டாளரை மீட்டமைக்க அனுமதிக்காது. பாதுகாப்பு தூண்டப்படும் போது, ஒப்பீட்டு வெளியீடு VD14 டையோடு வழியாக தலைகீழ் உள்ளீடு 13 DA1.2 SIFU க்கு செல்கிறது, மேலும் பாதுகாப்பு மின்னழுத்தம் "பார்த்த" அளவை விட அதிகமாக இருப்பதால், சக்தி தைரிஸ்டர்களின் மின்முனைகளுக்கு கட்டுப்பாட்டு பருப்புகளை வழங்குதல். உடனடியாக தடை செய்யப்படும்.
பாதுகாப்பு ஒப்பீட்டாளரின் DA2.3 வெளியீட்டின் மின்னழுத்தம் டிரான்சிஸ்டர் VT4 ஐத் திறக்கிறது, இது ரிலே P1.1 ஐ இயக்குகிறது மற்றும் எல்இடி விபத்துக்கான சமிக்ஞையை ஒளிரச் செய்கிறது. டிரைவை முழுவதுமாக அணைத்துவிட்டு, 5 - 10 வினாடிகள் இடைநிறுத்தப்பட்ட பிறகு, அதற்கு மீண்டும் சக்தியைப் பயன்படுத்தினால், பாதுகாப்பை அகற்றலாம்.
கட்டுப்பாட்டு அலகு சக்தி பகுதி கீழே உள்ள படத்தில் காட்டப்பட்டுள்ளது:
டிரான்ஸ்ஃபார்மர் Tr1 கட்டுப்பாட்டு அலகு சுற்றுக்கு சக்தி அளிக்க பயன்படுகிறது. ரெக்டிஃபையர் அரை-பிரிட்ஜ் சர்க்யூட்டைப் பயன்படுத்தி கூடியிருக்கிறது மற்றும் இரண்டு பவர் டையோட்கள் டி 1, டி 2 மற்றும் இரண்டு பவர் தைரிஸ்டர்கள் டி 1, டி 2 மற்றும் ஒரு பாதுகாப்பு டையோடு டி 3 ஆகியவை அடங்கும். புல முறுக்கு அதன் சொந்த தனி மின்மாற்றி மற்றும் ரெக்டிஃபையர் மூலம் இயக்கப்படுகிறது. இயந்திரத்தில் டகோஜெனரேட்டர் இல்லை என்றால், வேகக் கட்டுப்பாட்டுக்கான OS ஐ பின்வருமாறு செயல்படுத்தலாம்:

பொருந்தினால் தற்போதைய மின்மாற்றி, பின்னர் DC மோட்டார் கட்டுப்பாட்டு அலகு வரைபடத்தில் ஜம்பர் P1 1-3 நிலைக்கு அமைக்கப்பட வேண்டும்.
நீங்கள் ஒரு ஆர்மேச்சர் மின்னழுத்த சென்சாரையும் பயன்படுத்தலாம்:

ஆர்மேச்சர் வோல்டேஜ் சென்சார் என்பது ஆர்மேச்சர் டெர்மினல்களுடன் நேரடியாக இணைக்கப்பட்ட ஒரு வடிகட்டி-பிளவு ஆகும். இயக்கி பின்வருமாறு கட்டமைக்கப்பட்டுள்ளது. "பணி" மற்றும் "அளவிடுதல் Uoc" எதிர்ப்புகள் நடுத்தர நிலைக்குத் திரும்புகின்றன. ஆர்மேச்சர் வோல்டேஜ் சென்சாரின் எதிர்ப்பு R5 குறைந்தபட்சமாக மாற்றப்பட்டது. நாங்கள் இயக்ககத்தை இயக்கி, ஆர்மேச்சர் மின்னழுத்தத்தை சுமார் 110 வோல்ட்டுகளாக அமைக்கிறோம். ஆர்மேச்சரில் மின்னழுத்தத்தை அளவிடுவதன் மூலம், எதிர்ப்பு R5 ஐ சுழற்றத் தொடங்குகிறோம். மாற்றத்தின் ஒரு குறிப்பிட்ட தருணத்தில், ஆர்மேச்சரில் உள்ள மின்னழுத்தம் குறையத் தொடங்கும், இது OS வேலை செய்ததைக் குறிக்கிறது.
டிசி மோட்டாரைக் கட்டுப்படுத்த அச்சிடப்பட்ட சர்க்யூட் போர்டின் வரைதல் நிரலில் செய்யப்பட்டுள்ளது மற்றும் நீங்கள் எளிதாக செய்யலாம் அச்சிடப்பட்ட சர்க்யூட் போர்டுஅதை நீங்களே முறை செய்யுங்கள்
op-amps DA1, DA2 இல் விநியோக மின்னழுத்தங்களைச் சரிபார்த்து வடிவமைப்பை அமைக்க ஆரம்பிக்கலாம். சாக்கெட்டுகளில் மைக்ரோ சர்க்யூட்களை நிறுவ பரிந்துரைக்கப்படுகிறது. பின்னர் KT1, KT2, KT3 ஆகிய கட்டுப்பாட்டு புள்ளிகளில் அலைக்கற்றைகளை சரிபார்க்கிறோம். CT4 புள்ளியில். பொத்தான் திறந்திருக்கும் போது நாம் மரத்தூள் பருப்புகளைப் பார்க்க வேண்டும்.
டியூனிங் ரெசிஸ்டன்ஸ் RP1 ஐப் பயன்படுத்தி, “பார்த்த” ஊஞ்சலை சுமார் 9 வோல்ட்டுகளாக அமைத்தோம். கட்டுப்பாட்டு புள்ளி KT3 இல், துடிப்பு கால அளவு 1.5 - 1.8ms ஆகும்
KT5 கட்டுப்பாட்டுப் புள்ளியில் RR1 நெம்புகோலைச் சுழற்றுவதன் மூலம், பருப்புகளின் கடமைச் சுழற்சியில் ஏற்படும் மாற்றத்தை, குறைந்தபட்ச எதிர்ப்பு RR1 உடன் அதிகபட்சமாக அவை முழுமையாக மறைந்துவிடும் வரை கட்டுப்படுத்துகிறோம். இந்த வழக்கில், நாம் ஒரு சுமையாக இணைக்கப்பட்ட மின் அலகுடன் இணைக்கப்பட்ட ஒளி விளக்கின் பிரகாசம் மாற வேண்டும்.
பின்னர் கட்டுப்பாட்டு அலகு இயந்திரம் மற்றும் டகோஜெனரேட்டருடன் இணைக்கிறோம். RR1 ரெகுலேட்டரைப் பயன்படுத்தி, ஆர்மேச்சர் மின்னழுத்தத்தை 40-50 வோல்ட்டுகளாக அமைக்கிறோம். எதிர்ப்பு RP3 நடுத்தர நிலையில் இருக்க வேண்டும். மோட்டார் ஆர்மேச்சரில் மின்னழுத்தத்தை அளவிடுவது, எதிர்ப்பை RP3 சுழற்றுகிறோம். சரிசெய்தலின் ஒரு குறிப்பிட்ட கட்டத்தில், ஆர்மேச்சரில் உள்ள மின்னழுத்தம் குறையத் தொடங்கும், இது பின்னூட்டம் வேலை செய்ததைக் குறிக்கிறது.
ஆர்மேச்சர் மின்னோட்ட பின்னூட்டம் பயன்படுத்தப்பட்டால், மின்னோட்ட மின்மாற்றி தேவைப்படுகிறது, இது ரெக்டிஃபையர் பவர் சர்க்யூட்டுடன் இணைக்கப்பட்டுள்ளது. தற்போதைய மின்மாற்றி அளவுத்திருத்த சுற்று கீழே விவாதிக்கப்படுகிறது. எதிர்ப்பைத் தேர்ந்தெடுப்பதன் மூலம், மின்மாற்றி வெளியீட்டில் 2 ÷ 2.5v இன் மாற்று மின்னழுத்தத்தைப் பெறவும். சுமை சக்தி RN1 மோட்டார் சக்திக்கு சமமாக இருக்க வேண்டும்
சுமை மின்தடை இல்லாமல் தற்போதைய மின்மாற்றியை இயக்க பரிந்துரைக்கப்படவில்லை என்பதை நினைவில் கொள்ளுங்கள்.
தற்போதைய மின்மாற்றியை OS சர்க்யூட் P1 மற்றும் P2 உடன் இணைக்கிறோம். சரிசெய்தலின் போது, பாதுகாப்பின் தவறான தூண்டுதலைத் தவிர்க்க D12 டையோடை அவிழ்க்க பரிந்துரைக்கப்படுகிறது. KT8, KT9, KT10 ஆகிய கட்டுப்பாட்டு புள்ளிகளில் உள்ள அலைக்கற்றைகள் கீழே உள்ள படத்தில் காட்டப்பட்டுள்ளன.

மேலும் சரிசெய்தல் ஒரு டகோஜெனரேட்டரைப் பயன்படுத்துவதைப் போன்றது.
இந்த DC மோட்டார் கட்டுப்பாட்டு அலகு ஒரு போரிங் இயந்திரத்திற்காக கையால் செய்யப்பட்டது. மேலே உள்ள பச்சை இணைப்பில் உள்ள காப்பகத்தில் உள்ள புகைப்படங்களைப் பார்க்கவும்.
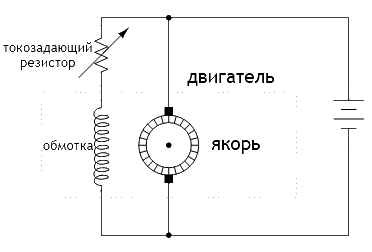
DC மோட்டார்களில், இரண்டு காந்தப்புலங்களுக்கிடையேயான எதிர்வினையால் முறுக்குவிசை உருவாக்கப்படுகிறது: ஒரு புலம் நிலையான புல முறுக்கினால் நிறுவப்படுகிறது, மற்றொன்று சுழலும் ஆர்மேச்சரில் முறுக்குகளால் நிறுவப்படுகிறது. சில DC மோட்டர்களில் ஃபீல்ட் வைண்டிங் இல்லை, மாறாக பெரிய நிரந்தர காந்தங்கள் அனைத்து இயக்க நிலைகளிலும் நிலையான காந்தப்புலத்தை நிலையாக வைத்திருக்கும்.
எப்படியிருந்தாலும், டிசி மோட்டாரின் செயல்பாட்டின் கொள்கை என்னவென்றால், ஆர்மேச்சர் வழியாக செல்லும் மின்னோட்டம் ஒரு காந்தப்புலத்தை உருவாக்குகிறது, அது தன்னை நிலையான புலத்துடன் சீரமைக்க முயற்சிக்கிறது. எனவே நங்கூரம் சுழல்கிறது:
எனினும், சேகரிப்பான்(பிரிவு செய்யப்பட்ட செப்புக் கீற்றுகளின் தொகுப்பு என்று அழைக்கப்படுகிறது), ஏற்கனவே "சீரமைக்கப்பட்ட" முறுக்குடன் மின் தொடர்பை உடைத்து மற்றொரு முறுக்கு (அல்லது உள்ளதைப் போல) தூண்டுகிறது. எளிய உதாரணம், மேலே காட்டப்பட்டுள்ளது, அதே சுற்றுக்கு எதிர் திசையில் மிகைப்படுத்துகிறது), மற்றொரு தவறான காந்தப்புலத்தை உருவாக்குகிறது, இது ஆர்மேச்சரைத் தொடர்ந்து சுழற்றுகிறது. கார்பன் தூரிகைகள் மூலம் சுழலும் கம்யூட்டர் பிரிவுகளுக்கும் நிலையான சக்தி மூலத்திற்கும் இடையே மின் தொடர்பு ஏற்படுகிறது. இந்த தூரிகைகள் பின்னர் தேய்ந்துவிடும் குறிப்பிட்ட நேரம்(சேகரிப்பாளரைப் போலவே) எனவே அவ்வப்போது மாற்றுதல் தேவைப்படுகிறது.
பெரும்பாலான தொழில்துறை DC மோட்டார்கள் மேலே உள்ள எளிமைப்படுத்தப்பட்ட விளக்கத்தில் காட்டப்பட்டுள்ளபடி ஒன்றுக்கு பதிலாக பல ஆர்மேச்சர் முறுக்குகளுடன் தயாரிக்கப்படுகின்றன. பெரிய (1250 ஹெச்பி) DC மின்சார மோட்டாரின் புகைப்படம், வளைவுகள் மற்றும் ஆர்மேச்சருடன் படகைச் செலுத்தப் பயன்படுகிறது, இங்கே காட்டப்பட்டுள்ளது:

இந்த மின்சார மோட்டாரின் ஒரு பிரஷ் அசெம்பிளி கார்பன் பிரஷ்கள், ஸ்பிரிங்-லோடட் ஹோல்டர் மற்றும் ஆர்மேச்சர் சுழலும் போது பிரஷ் தொடர்பு கொள்ளும் பல கம்யூடேட்டர் கீற்றுகள் ஆகிய இரண்டின் நெருக்கமான காட்சியைக் காட்டுகிறது.

DC மோட்டார்களில், இயந்திர மற்றும் மின் அளவுகளுக்கு இடையே பின்வரும் உறவுகள் தோன்றும்:
முறுக்கு:
- முறுக்கு ஆர்மேச்சர் காந்தப்புலத்தின் வலிமைக்கு நேரடியாக விகிதாசாரமாகும், இது ஆர்மேச்சர் முறுக்குகள் வழியாக செல்லும் மின்னோட்டத்திற்கு நேரடியாக விகிதாசாரமாகும்;
- முறுக்கு விகிதமானது நிலையான காந்தப்புலத்தின் வலிமைக்கு நேரடியாக விகிதாசாரமாகும், இது உற்சாகமான முறுக்கு (காந்தங்கள் இல்லாத மோட்டாரில்) வழியாக செல்லும் மின்னோட்டத்திற்கு நேரடியாக விகிதாசாரமாகும்.
- நிலையான காந்தப்புலத்தில் சுழலும் போது ஆர்மேச்சரால் உருவாக்கப்படும் emf ஆல் வேகம் வரையறுக்கப்படுகிறது. இந்த EMF ஆர்மேச்சரின் சுழற்சியின் வேகத்திற்கு நேரடியாக விகிதாசாரமாகும், மேலும் நிலையான காந்தப்புலத்தின் வலிமைக்கும் நேரடியாக விகிதாசாரமாகும் (இது காந்தங்கள் இல்லாத மின்சார மோட்டாரில் உற்சாகமான முறுக்கு மின்னோட்டத்திற்கு நேரடியாக விகிதாசாரமாகும்);
- எனவே, வேகம் ஆர்மேச்சர் மின்னழுத்தத்திற்கு நேரடியாக விகிதாசாரமாகும்;
- மேலும், வேகமானது நிலையான காந்தப்புலத்தின் வலிமைக்கு நேர்மாறான விகிதத்தில் உள்ளது, இது உற்சாகமான முறுக்குகள் வழியாக செல்லும் மின்னோட்டத்திற்கு நேரடியாக விகிதாசாரமாகும் (காந்தங்கள் இல்லாத மோட்டாரில்).

மின்னோட்ட-அமைக்கும் மின்தடையத்தின் குறையும் எதிர்ப்பு, உற்சாகமான முறுக்கு வழியாக அதிக மின்னோட்டத்தை ஓட்ட அனுமதிக்கிறது, அதன் காந்தப்புலத்தை அதிகரிக்கிறது. இது மோட்டாரின் செயல்பாட்டில் இரண்டு விளைவுகளை ஏற்படுத்தும்: முதலாவதாக, மோட்டார் முன்பு செய்ததை விட அதிக முறுக்குவிசையை உருவாக்கும் (அதே அளவு ஆர்மேச்சர் மின்னோட்டத்திற்கு), ஏனெனில் வலுவான ஆர்மேச்சர் காந்தப்புலம் ஆர்மேச்சரில் செயல்படும்; இரண்டாவதாக, அதே சுழற்சி வேகத்தில் சுழலும் ஆர்மேச்சரால் பெரிய பின்புற EMF உருவாக்கப்படுவதால் மோட்டார் வேகம் குறையும் மற்றும் இந்த பின் EMF இயற்கையாகவே DC மூலத்தின் பயன்படுத்தப்பட்ட மின்னழுத்தத்திற்கு சமமாக முயற்சிக்கும். மறுபுறம், கட்டுப்பாட்டு மின்தடையத்தின் எதிர்ப்பை அதிகரிப்பதன் மூலம் டிசி மோட்டாரின் வேகத்தை அதிகரிக்கலாம் (மற்றும் வெளியீட்டு முறுக்குவிசையைக் குறைக்கலாம்), ஆர்மேச்சரைச் சுழலும் நிலையான காந்தப்புலத்தை பலவீனப்படுத்தலாம்.
முறுக்கு மின்னோட்டத்தை சரிசெய்வதன் மூலம், வேகத்திற்கும் முறுக்குவிசைக்கும் இடையிலான சமநிலையை நீங்கள் மாற்றலாம், ஆனால் ஒட்டுமொத்தமாக கட்டுப்படுத்த இது போதாது சக்திஇயந்திரம். DC மோட்டாரின் மின் உற்பத்தியைக் கட்டுப்படுத்த, நாம் ஆர்மேச்சர் மின்னழுத்தத்தையும் மின்னோட்டத்தையும் கட்டுப்படுத்த வேண்டும். இந்த பணிக்கு மாறி மின்தடையங்கள் பயன்படுத்தப்படலாம், ஆனால் இந்த முறை மின் இழப்புக்கு வழிவகுக்கும் என்பதால் தற்போது பயன்படுத்தப்படவில்லை.
எலக்ட்ரானிக் பவர் கண்ட்ரோல் சர்க்யூட்டைப் பயன்படுத்துவதே சிறந்த தீர்வாக இருக்கும் டிரான்சிஸ்டர் சுவிட்சுகள்சுற்றுவட்டத்தில் உள்ள மோட்டார் ஆர்மேச்சரை விரைவாக அணைத்து, இயக்கவும். இந்த வகை கட்டுப்பாடு துடிப்பு அகல பண்பேற்றம் அல்லது PWM என்று அழைக்கப்படுகிறது.
(துடிப்பு கால விகிதம் மற்றும் மீண்டும் மீண்டும் வரும் காலம், இதற்கு நேர்மாறானது கடமை சுழற்சிதுடிப்பின் அளவு இயந்திரத்திற்கு வழங்கப்படும் சக்தியின் பகுதியை தீர்மானிக்கிறது:

புள்ளிவிவரங்களில், பிழை "கடமை காரணி" அல்ல, ஆனால் "கடமை காரணி"
அத்தகைய மின்னணு சுற்றுசக்தி ஒழுங்குமுறை பொதுவாக அழைக்கப்படுகிறது ஓட்டு. இதனால், உடன் ஓட்டு மாறி வேகம்(அல்லது VSD) என்பது DC மோட்டாரின் வேகத்தைக் கட்டுப்படுத்தப் பயன்படுத்தப்படும் உயர் மின்சுற்று ஆகும். கொடுக்கப்பட்ட வேகத்தில் மோட்டாரைத் தொடங்குவதற்கு மோட்டார் டிரைவ்களை கைமுறையாக அமைக்கலாம் அல்லது எலக்ட்ரானிக் சிக்னல்கள் இயக்கத்தைக் கட்டுப்படுத்துவது போல் மோட்டரின் வேகத்தை மாற்ற மின்னணு கட்டுப்பாட்டு சமிக்ஞைகளை ஏற்கலாம். பொருத்தப்பட்ட தொலை அமைப்புகட்டுப்பாட்டு சமிக்ஞைகளை கடத்துகிறது, இயக்கி மற்ற இறுதி ஆக்சுவேட்டரைப் போலவே செயல்படுகிறது: கட்டுப்படுத்தி கட்டளைகளைப் பின்பற்றி, இது ஒரு குறிப்பிட்ட தொழில்நுட்ப அளவுருவை உறுதிப்படுத்துகிறது.
மூலம் பாரம்பரிய தொழில்நுட்பம்க்கு மின்சார விநியோகத்தை மாற்றுதல் dc மோட்டார் பயன்பாட்டு சுற்று கட்டுப்படுத்தப்பட்ட திருத்தி, இதில் மாற்ற வேண்டும் ஏசி DC இல், வழக்கமான திருத்தும் டையோட்களுக்குப் பதிலாக தைரிஸ்டர்கள் பயன்படுத்தப்படுகின்றன. தொழில்துறை DC மோட்டார்களுக்கான சக்தியின் முக்கிய ஆதாரம் மாற்று மின்னோட்டமாகவே உள்ளது, மேலும் இந்த மாற்று மின்னோட்டமானது கணினியின் ஒரு கட்டத்தில் நேரடி மின்னோட்டமாக மாற்றப்பட வேண்டும்; இந்த ரெக்டிஃபையர் யூனிட்டில் நேரடியாக கட்டுப்பாட்டை ஒருங்கிணைப்பது அர்த்தமுள்ளதாக இருக்கிறது:

கட்டுப்படுத்தப்பட்ட ரெக்டிஃபையர் சர்க்யூட் மாற்று மின்னோட்ட அலைவு பருப்புகளுடன் தொடர்புடைய "தொடக்க" துடிப்பின் நேரத்தை மாற்றும் கொள்கையின் அடிப்படையில் செயல்படுகிறது. ஒவ்வொரு ஏசி சுழற்சியிலும் தைரிஸ்டர் எவ்வளவு முன்னதாக திறக்கிறதோ, அவ்வளவு நேரம் அது மோட்டாருக்கு மின்னோட்டத்தை பாய அனுமதிக்கும். பருப்பு வகைகள் மற்றும் அவற்றின் கால அளவை உருவாக்குவதற்கு கட்ட கட்டுப்பாட்டு சுற்று பொறுப்பு.
ஒரு டிசி டிரைவ், மோட்டாரின் சக்தியைக் கட்டுப்படுத்துவது கச்சா மற்றும் பெரும்பாலான செயல்முறைகளுக்கு கட்டுப்படுத்த கடினமாக இருக்கும். மாறி வேக இயக்ககத்திலிருந்து நீங்கள் விரும்புவது துல்லியமான கட்டுப்பாடு. வேகம்இயந்திரம். இந்த காரணத்திற்காக, பெரும்பாலான டிரைவ்கள் மோட்டார் ஷாஃப்டுடன் இயந்திரத்தனமாக இணைக்கப்பட்ட டேகோமீட்டரிலிருந்து கருத்துக்களைப் பெற வடிவமைக்கப்பட்டுள்ளன. டகோமீட்டர் பொதுவாக ஒரு சிறிய ஜெனரேட்டரை உருவாக்குகிறது நிலையான மின்னழுத்தம், தண்டு சுழற்சி வேகத்திற்கு நேரடியாக விகிதாசாரமாக (0-10 V வெளியீட்டுடன்). அதன் அளவீடுகளின்படி, சரிசெய்யக்கூடிய இயக்கி த்ரோட்டில்கள் மின்சார சக்தி, சுழற்சி வேகம் கட்டுப்பாட்டு சமிக்ஞையால் குறிப்பிடப்பட்ட வேகத்துடன் ஒத்துப்போகும் வகையில் இயந்திரத்திற்கு வழங்கப்படுகிறது. வேகக் கட்டுப்பாட்டுக்கான உள்ளமைக்கப்பட்ட பின்னூட்ட வளையத்துடன், மாறி வேக இயக்கி கட்டுப்பாட்டு அமைப்பில் "ஸ்லேவ் கன்ட்ரோலர்" ஆகிறது. இயக்ககம் வேகக் குறிப்பு வெளியீட்டைப் பெறலாம்
விளாடிமிர் ரென்டியுக், ஜாபோரோஷியே, உக்ரைன்
கட்டுரை தருகிறது சுருக்கமான கண்ணோட்டம்பிரஷ்டு டிசி மோட்டார்களைக் கட்டுப்படுத்த வடிவமைக்கப்பட்ட பிரபலமான சர்க்யூட்களின் பகுப்பாய்வு மற்றும் அசல் மற்றும் அதிகம் அறியப்படாத சர்க்யூட் தீர்வுகளையும் வழங்குகிறது.
மின்சார மோட்டார்கள் அநேகமாக மிகவும் பிரபலமான மின் பொறியியல் தயாரிப்புகளில் ஒன்றாகும். அனைத்தையும் அறிந்த விக்கிபீடியா நமக்குச் சொல்வது போல், மின்சார மோட்டார் - மின்சார கார்(எலக்ட்ரோ மெக்கானிக்கல் கன்வெர்ட்டர்), இதில் மின் ஆற்றல்இயந்திரமாக மாறுகிறது. அதன் வரலாற்றின் தொடக்கமாக 1821 ஆம் ஆண்டில் மைக்கேல் ஃபாரடே கண்டுபிடித்த கண்டுபிடிப்பாகக் கருதலாம், இது ஒரு காந்தப்புலத்தில் ஒரு கடத்தியை சுழற்றுவதற்கான சாத்தியத்தை நிறுவுகிறது. ஆனால் சுழலும் ரோட்டருடன் கூடிய முதல் அதிக அல்லது குறைவான நடைமுறை மின்சார மோட்டார் அதன் கண்டுபிடிப்புக்காக 1834 வரை காத்திருந்தது. Königsberg இல் பணிபுரியும் போது, இது Moritz Hermann von Jacobi என்பவரால் கண்டுபிடிக்கப்பட்டது, இது போரிஸ் செமனோவிச் என்று நமக்கு நன்கு தெரியும். மின்சார மோட்டார்கள் இரண்டு முக்கிய அளவுருக்களால் வகைப்படுத்தப்படுகின்றன - தண்டு (ரோட்டார்) சுழற்சியின் வேகம் மற்றும் தண்டு மீது உருவாக்கப்பட்ட முறுக்கு. IN பொது அடிப்படையில்இந்த இரண்டு அளவுருக்களும் மோட்டருக்கு வழங்கப்படும் மின்னழுத்தம் மற்றும் அதன் முறுக்குகளில் உள்ள மின்னோட்டத்தைப் பொறுத்தது. தற்போது, பல வகையான மின்சார மோட்டார்கள் உள்ளன, மேலும் எங்கள் புகழ்பெற்ற இலக்கிய கதாபாத்திரம் கோஸ்மா ப்ருட்கோவ் குறிப்பிட்டுள்ளபடி, அபரிமிதத்தை புரிந்துகொள்வது சாத்தியமில்லை என்பதால், டிசி மோட்டார்களைக் கட்டுப்படுத்தும் அம்சங்களைக் கருத்தில் கொள்வோம் (இனிமேல் குறிப்பிடப்படுகிறது. மின்சார மோட்டார்களாக).
இரண்டு வகையான டிசி மோட்டார்கள் உள்ளன - நாம் பழகிய பிரஷ்டு மோட்டார்கள் மற்றும் பிரஷ்லெஸ் (ஸ்டெப்பர்) மோட்டார்கள். முதலாவதாக, மோட்டார் தண்டு சுழற்சியை உறுதி செய்யும் மாற்று காந்தப்புலம், ரோட்டார் முறுக்குகளால் உருவாகிறது, அவை தூரிகை கம்யூட்டர் - கம்யூடேட்டர் மூலம் இயக்கப்படுகின்றன. இது நிலையானதுடன் தொடர்பு கொள்கிறது காந்தப்புலம்ஸ்டேட்டர், ரோட்டரை சுழற்றுகிறது. அத்தகைய மோட்டார்களை இயக்க, வெளிப்புற கம்யூட்டர்கள் தேவையில்லை, அவற்றின் பங்கு சேகரிப்பாளரால் செய்யப்படுகிறது. ஸ்டேட்டரை ஒரு அமைப்பிலிருந்து உருவாக்கலாம் நிரந்தர காந்தங்கள், மற்றும் மின்காந்தங்களிலிருந்து. இரண்டாவது வகை மின்சார மோட்டாரில், முறுக்குகள் மோட்டரின் நிலையான பகுதியை (ஸ்டேட்டர்) உருவாக்குகின்றன, மேலும் ரோட்டார் நிரந்தர காந்தங்களால் ஆனது. இங்கே, ஸ்டேட்டர் முறுக்குகளை மாற்றுவதன் மூலம் ஒரு மாற்று காந்தப்புலம் உருவாக்கப்படுகிறது, இது வெளிப்புற கட்டுப்பாட்டு சுற்று மூலம் செய்யப்படுகிறது. ஸ்டெப்பர் மோட்டார்கள் ஆங்கில எழுத்துப்பிழை) சேகரிப்பாளர்களை விட விலை அதிகம். அது போதும் சிக்கலான சாதனங்கள்உன்னுடன் குறிப்பிட்ட அம்சங்கள். அவர்களின் முழு விளக்கம்ஒரு தனி வெளியீடு தேவை மற்றும் இந்த கட்டுரையின் எல்லைக்கு அப்பாற்பட்டது. இந்த வகை என்ஜின்கள் மற்றும் அவற்றின் கட்டுப்பாட்டு சுற்றுகள் பற்றிய முழுமையான தகவலுக்கு, எடுத்துக்காட்டாக, நீங்கள் பார்க்கவும்.
பிரஷ்டு மோட்டார்கள் (படம் 1) மலிவானவை மற்றும் பொதுவாக தேவையில்லை சிக்கலான அமைப்புகள்மேலாண்மை. அவற்றின் செயல்பாட்டிற்கு, விநியோக மின்னழுத்தத்தை வழங்குவதற்கு போதுமானது (சரிசெய்யப்பட்ட, நிலையான!). அத்தகைய இயந்திரத்தின் தண்டு சுழற்சி வேகத்தை சரிசெய்ய அல்லது ஒரு சிறப்பு முறுக்கு கட்டுப்பாட்டு பயன்முறையைப் பயன்படுத்த வேண்டிய அவசியம் ஏற்படும் போது சிக்கல்கள் எழத் தொடங்குகின்றன. அத்தகைய இயந்திரங்களின் மூன்று முக்கிய குறைபாடுகள் உள்ளன: குறைந்த முறுக்கு குறைந்த வேகம்சுழற்சி (எனவே, ஒரு கியர்பாக்ஸ் அடிக்கடி தேவைப்படுகிறது, மேலும் இது ஒட்டுமொத்த கட்டமைப்பின் விலையை பாதிக்கிறது), தலைமுறை உயர் நிலைமின்காந்த மற்றும் ரேடியோ குறுக்கீடு (சேகரிப்பாளரில் நெகிழ் தொடர்பு காரணமாக) மற்றும் குறைந்த நம்பகத்தன்மை (இன்னும் துல்லியமாக, ஒரு குறுகிய ஆதாரம்; காரணம் அதே சேகரிப்பாளரில் உள்ளது). கம்யூட்டர் மோட்டார்கள் பயன்படுத்தும் போது, தற்போதைய நுகர்வு மற்றும் அவற்றின் ரோட்டரின் சுழற்சி வேகம் தண்டு மீது சுமை சார்ந்து இருப்பதை கணக்கில் எடுத்துக்கொள்வது அவசியம். பிரஷ்டு மோட்டார்கள் மிகவும் பல்துறை மற்றும் பரவலாகப் பயன்படுத்தப்படுகின்றன, குறிப்பாக விலையை நிர்ணயிக்கும் காரணியாக இருக்கும் குறைந்த விலை பயன்பாடுகளில்.
ரோட்டார் வேகம் என்பதால் கம்யூட்டர் மோட்டார்முதலில், மோட்டருக்கு வழங்கப்பட்ட மின்னழுத்தத்தைப் பொறுத்தது, வெளியீட்டு மின்னழுத்தத்தை அமைக்க அல்லது சரிசெய்யும் திறனைக் கொண்ட அதன் கட்டுப்பாட்டுக்கான சுற்றுகளைப் பயன்படுத்துவது இயற்கையானது. இணையத்தில் காணக்கூடிய இத்தகைய தீர்வுகள் சரிசெய்யக்கூடிய மின்னழுத்த நிலைப்படுத்திகளை அடிப்படையாகக் கொண்ட சுற்றுகள் மற்றும் தனித்தனி நிலைப்படுத்திகளின் வயது நீண்ட காலமாகிவிட்டதால், மலிவான ஒருங்கிணைந்த இழப்பீட்டு நிலைப்படுத்திகளைப் பயன்படுத்துவது நல்லது. சாத்தியமான விருப்பங்கள்அத்தகைய திட்டம் படம் 2 இல் காட்டப்பட்டுள்ளது.
திட்டம் பழமையானது, ஆனால் இது மிகவும் வெற்றிகரமானதாகவும், மிக முக்கியமாக, மலிவானதாகவும் தெரிகிறது. ஒரு பொறியாளரின் பார்வையில் இருந்து பார்ப்போம். முதலில், மோட்டரின் முறுக்கு அல்லது மின்னோட்டத்தை கட்டுப்படுத்த முடியுமா? கூடுதல் மின்தடையை நிறுவுவதன் மூலம் இதை தீர்க்க முடியும். படம் 2 இல் இது R LIM என குறிப்பிடப்பட்டுள்ளது. அதன் கணக்கீடு விவரக்குறிப்பில் சேர்க்கப்பட்டுள்ளது, ஆனால் இது மின்னழுத்த நிலைப்படுத்தியாக சுற்றுகளின் சிறப்பியல்புகளை மோசமாக்குகிறது (இதில் மேலும் கீழே). இரண்டாவதாக, எந்த வேகக் கட்டுப்பாட்டு விருப்பம் சிறந்தது? படம் 2a இல் உள்ள விருப்பம் ஒரு வசதியான நேரியல் கட்டுப்பாட்டு பண்புகளை வழங்குகிறது, அதனால்தான் இது மிகவும் பிரபலமானது. படம் 2b இல் உள்ள விருப்பம் நேரியல் அல்லாத பண்புகளைக் கொண்டுள்ளது. ஆனால் முதல் வழக்கில், மாறி மின்தடையத்தில் உள்ள தொடர்பு உடைந்தால், நாம் பெறுகிறோம் அதிகபட்ச வேகம், மற்றும் இரண்டாவது - குறைந்தபட்ச. எதை தேர்வு செய்வது என்பது குறிப்பிட்ட பயன்பாட்டைப் பொறுத்தது. இப்போது வழக்கமான அளவுருக்கள் கொண்ட மோட்டருக்கான ஒரு உதாரணத்தைப் பார்ப்போம்: இயக்க மின்னழுத்தம் 12 V; அதிகபட்ச இயக்க மின்னோட்டம் 1 A. LM317 IC, பின்னொட்டுகளைப் பொறுத்து, 0.5 A முதல் 1.5 A வரையிலான அதிகபட்ச வெளியீட்டு மின்னோட்டத்தைக் கொண்டுள்ளது (குறிப்பிடுதலைப் பார்க்கவும்; அதிக மின்னோட்டத்துடன் ஒத்த ICகள் உள்ளன) மற்றும் மேம்பட்ட பாதுகாப்பு (ஓவர்லோட் மற்றும் அதிக வெப்பத்திற்கு எதிராக). இந்த கண்ணோட்டத்தில், இது எங்கள் பணிக்கு ஏற்றது. சிறிய விஷயங்களில் எப்போதும் போல பிரச்சனைகள் மறைக்கப்படுகின்றன. எஞ்சின் அதிகபட்ச சக்திக்கு கொண்டு வரப்பட்டால், இது எங்கள் பயன்பாட்டிற்கு மிகவும் யதார்த்தமானது, IC, உள்ளீட்டு மின்னழுத்தம் V IN மற்றும் வெளியீடு V OUT ஆகியவற்றுக்கு இடையே 3 V க்கு சமமான குறைந்தபட்ச அனுமதிக்கப்பட்ட வேறுபாட்டுடன் கூட, குறைந்தபட்சம் ஆற்றலைச் சிதறடிக்கும்.
P = (V IN - V OUT)×I = 3×1 = 3 W.
எனவே, ஒரு ரேடியேட்டர் தேவைப்படுகிறது. மீண்டும் கேள்வி: சக்தி சிதறல் என்றால் என்ன? 3 W இல்? ஆனால் இல்லை. வெளியீட்டு மின்னழுத்தத்தைப் பொறுத்து IC இன் சுமை வரைபடத்தைக் கணக்கிடுவதற்கு நீங்கள் நேரத்தை எடுத்துக் கொண்டால் (எக்செல் இல் இதைச் செய்வது எளிது), பின்னர் எங்கள் நிபந்தனைகளின் கீழ் அதைப் பெறுவோம். அதிகபட்ச சக்தி IC இல் சீராக்கியின் அதிகபட்ச வெளியீட்டு மின்னழுத்தத்தில் அல்ல, ஆனால் 7.5 V வெளியீட்டு மின்னழுத்தத்தில் (படம் 3 ஐப் பார்க்கவும்), அது கிட்டத்தட்ட 5.0 W ஆக இருக்கும்!
நீங்கள் பார்க்க முடியும் என, இதன் விளைவாக மலிவானது அல்ல, ஆனால் மிகவும் பருமனானது. எனவே இந்த அணுகுமுறை 0.25 A க்கும் அதிகமான இயக்க மின்னோட்டத்துடன் குறைந்த சக்தி கொண்ட மோட்டார்களுக்கு மட்டுமே பொருத்தமானது.
கட்டுப்பாட்டுக்கு துடிப்பு அகல பண்பேற்றம் (PWM) முறையைப் பயன்படுத்துவதே வழி. இது உண்மையில் மிகவும் பொதுவானது. அதன் சாராம்சம் இயந்திரத்திற்கு கால அளவில் மாற்றியமைக்கப்பட்ட யூனிபோலார் செவ்வக பருப்புகளை வழங்குவதாகும். சிக்னல் கோட்பாட்டின் படி, அத்தகைய வரிசையின் அமைப்பு τ/T விகிதத்திற்கு விகிதாசாரமாக ஒரு நிலையான கூறுகளைக் கொண்டுள்ளது, அங்கு: τ என்பது துடிப்பு கால அளவு, மற்றும் T என்பது வரிசை காலம். அவள்தான் இயந்திரத்தின் வேகத்தைக் கட்டுப்படுத்துகிறாள், இது அவளை இந்த அமைப்பில் ஒரு ஒருங்கிணைப்பாளராக வேறுபடுத்துகிறது. PWM ரெகுலேட்டரின் வெளியீட்டு நிலை செயல்படுவதால் முக்கிய முறைஇது, ஒரு விதியாக, ஒப்பீட்டளவில் பெரிய இயந்திர சக்திகளுடன் கூட வெப்பத்தை அகற்ற பெரிய ரேடியேட்டர்கள் தேவையில்லை, மேலும் அத்தகைய சீராக்கியின் செயல்திறன் முந்தையதை விட ஒப்பிடமுடியாத அளவிற்கு அதிகமாக உள்ளது. சில சந்தர்ப்பங்களில், ஸ்டெப்-டவுன் அல்லது ஸ்டெப்-அப் டிசி/டிசி மாற்றிகளைப் பயன்படுத்துவது சாத்தியம், ஆனால் அவை பல வரம்புகளைக் கொண்டுள்ளன, எடுத்துக்காட்டாக, வெளியீட்டு மின்னழுத்த ஒழுங்குமுறையின் ஆழம் மற்றும் குறைந்தபட்ச சுமை ஆகியவற்றின் அடிப்படையில். எனவே, ஒரு விதியாக, பிற தீர்வுகள் மிகவும் பொதுவானவை. அத்தகைய சீராக்கியின் "கிளாசிக்கல்" சுற்று வடிவமைப்பு படம் 4 இல் வழங்கப்பட்டுள்ளது. இது ஒரு த்ரோட்டலாக (ரெகுலேட்டர்) பயன்படுத்தப்படுகிறது தொழில்முறை மாதிரிரயில்வே
முதல் செயல்பாட்டு பெருக்கியில் ஒரு ஜெனரேட்டரும், இரண்டாவது ஒரு ஒப்பீட்டாளரும் கூடியுள்ளனர். மின்தேக்கி C1 இலிருந்து ஒரு சமிக்ஞை ஒப்பீட்டாளரின் உள்ளீட்டிற்கு வழங்கப்படுகிறது, மேலும் மறுமொழி வரம்பை சரிசெய்வதன் மூலம், ஒரு சமிக்ஞை உருவாக்கப்படுகிறது. செவ்வக வடிவம்விரும்பிய விகிதத்துடன் τ/T (படம் 5).
சரிசெய்தல் வரம்பு RV1 (வேகமாக) மற்றும் RV3 (மெதுவாக) மின்தடையங்களை ஒழுங்கமைப்பதன் மூலம் அமைக்கப்படுகிறது, மேலும் வேக சரிசெய்தல் மின்தடையம் RV2 (வேகம்) மூலம் மேற்கொள்ளப்படுகிறது. ஒப்பீட்டாளரின் வாசலை அமைக்கும் வகுப்பியின் மதிப்புகளில் பிழைகள் உள்ள இதேபோன்ற சுற்று ரஷ்ய மொழி மன்றங்களில் இணையத்தில் பரவுகிறது என்ற உண்மையை வாசகர்களின் கவனத்தை ஈர்க்க விரும்புகிறேன். சக்திவாய்ந்த புலம்-விளைவு டிரான்சிஸ்டரைப் பயன்படுத்தி மோட்டார் நேரடியாக சுவிட்ச் மூலம் கட்டுப்படுத்தப்படுகிறது. இந்த MOSFET வகை டிரான்சிஸ்டரின் சிறப்பம்சங்கள் ஒரு உயர் இயங்கு மின்னோட்டம் (30 A மாறிலி, மற்றும் 120 A வரை துடிப்பு), அல்ட்ரா-குறைந்த திறந்த சேனல் எதிர்ப்பு (40 mOhm) மற்றும், எனவே, திறந்த நிலையில் குறைந்தபட்ச சக்தி இழப்புகள்.
அத்தகைய திட்டங்களைப் பயன்படுத்தும்போது முதலில் என்ன கவனம் செலுத்த வேண்டும்? முதலாவது கட்டுப்பாட்டு சுற்று செயல்படுத்தப்படுகிறது. இங்கே வரைபடத்தில் ஒரு சிறிய குறைபாடு உள்ளது (படம் 4). மாறி மின்தடையின் நகரும் தொடர்புடன் காலப்போக்கில் சிக்கல்கள் எழுந்தால், இயந்திரத்தின் முழுமையான, கிட்டத்தட்ட உடனடி முடுக்கம் பெறுவோம். இது எங்கள் சாதனத்தை சேதப்படுத்தலாம். மாற்று மருந்து என்ன? கூடுதல் போதுமான உயர்-எதிர்ப்பு மின்தடையை நிறுவவும், எடுத்துக்காட்டாக, IC இன் பின் 5 இலிருந்து 300 kOhm வரை பொதுவான கம்பி. இந்த வழக்கில், ரெகுலேட்டர் தோல்வியுற்றால், இயந்திரம் நிறுத்தப்படும்.
அத்தகைய கட்டுப்பாட்டாளர்களின் மற்றொரு சிக்கல் வெளியீட்டு நிலை அல்லது மோட்டார் இயக்கி ஆகும். அத்தகைய சுற்றுகளில், இது புலம்-விளைவு டிரான்சிஸ்டர்கள் மற்றும் இருமுனை ஒன்றைப் பயன்படுத்தி உருவாக்கப்படலாம்; பிந்தையவை ஒப்பிடமுடியாத மலிவானவை. ஆனால் முதல் மற்றும் இரண்டாவது விருப்பங்கள் இரண்டிலும் சிலவற்றை கணக்கில் எடுத்துக்கொள்வது அவசியம் முக்கியமான புள்ளிகள். நிர்வாகத்திற்காக புல விளைவு டிரான்சிஸ்டர் MOSFET வகைக்கு அதன் உள்ளீட்டு கொள்ளளவை சார்ஜ் செய்து டிஸ்சார்ஜ் செய்ய வேண்டும், இது ஆயிரக்கணக்கான picofarads ஆக இருக்கலாம். கேட் (படம் 4 இல் R6) தொடரில் மின்தடையைப் பயன்படுத்தாவிட்டால் அல்லது அதன் மதிப்பு மிகவும் சிறியதாக இருந்தால், ஒப்பீட்டளவில் உயர் அதிர்வெண்கள்கட்டுப்பாடு op-amp தோல்வியடையலாம். நீங்கள் ஒரு பெரிய மதிப்பின் R6 ஐப் பயன்படுத்தினால், டிரான்சிஸ்டர் அதன் பரிமாற்ற குணாதிசயத்தின் செயலில் உள்ள மண்டலத்தில் நீண்ட காலம் இருக்கும், எனவே, இழப்புகள் மற்றும் சுவிட்சின் வெப்பத்தில் அதிகரிப்பு உள்ளது.
படம் 4 இல் உள்ள சுற்று பற்றி மேலும் ஒரு குறிப்பு. BUZ11 டிரான்சிஸ்டரின் அமைப்பு ஏற்கனவே அதன் சொந்த உள் அதிவேக பாதுகாப்பு டையோடு இருப்பதால், கூடுதல் டையோடு D2 ஐப் பயன்படுத்துவதில் எந்த அர்த்தமும் இல்லை. சிறந்த பண்புகள்முன்மொழியப்பட்டதை விட. டையோடு D1 என்பதும் தெளிவாக மிதமிஞ்சியதாக உள்ளது, டிரான்சிஸ்டர் BUZ11 ± 20 V இன் கேட்-சோர்ஸ் மின்னழுத்தத்தை அனுமதிக்கிறது, மேலும் 12 V க்கு மேல் உள்ள மின்னழுத்தங்கள் மற்றும் யூனிபோலார் சப்ளையுடன் கூடிய கட்டுப்பாட்டு சுற்றுகளில் துருவமுனைப்பு தலைகீழானது சாத்தியமற்றது.
நீங்கள் இருமுனை டிரான்சிஸ்டரைப் பயன்படுத்தினால், போதுமான அடிப்படை மின்னோட்டத்தை உருவாக்குவதில் சிக்கல் எழுகிறது. அறியப்பட்டபடி, விசையை நிறைவு செய்ய இருமுனை டிரான்சிஸ்டர்அதன் அடிப்படை மின்னோட்டம் சுமை மின்னோட்டத்தின் குறைந்தபட்சம் 0.06 ஆக இருக்க வேண்டும். செயல்பாட்டு பெருக்கி அத்தகைய மின்னோட்டத்தை வழங்காது என்பது தெளிவாகிறது. இந்த நோக்கத்திற்காக, ஒரு அடிப்படையில் ஒத்த ரெகுலேட்டரில், இது பயன்படுத்தப்படுகிறது, எடுத்துக்காட்டாக, நிறுவனத்தின் பிரபலமான PT-5201 மினி-செதுக்கியில், ஒரு டிரான்சிஸ்டர் பயன்படுத்தப்படுகிறது, இது டார்லிங்டன் சர்க்யூட் ஆகும். இங்கே ஒரு சுவாரஸ்யமான விஷயம் இருக்கிறது. இந்த மினி-செதுக்குபவர்கள் சில நேரங்களில் தோல்வியடைகிறார்கள், ஆனால் டிரான்சிஸ்டரின் அதிக வெப்பம் காரணமாக அல்ல, ஆனால் IC யின் அதிக வெப்பம் காரணமாக (அதிகபட்சம் இயக்க வெப்பநிலை+70 °C) வெளியீடு டிரான்சிஸ்டர் (அதிகபட்சம் அனுமதிக்கப்பட்ட வெப்பநிலை+150 °C). கட்டுரையின் ஆசிரியரால் பயன்படுத்தப்பட்ட தயாரிப்புகளில், அது IC உடலுடன் நெருக்கமாக அழுத்தி, பசை மீது வைக்கப்பட்டது, இது ஏற்றுக்கொள்ள முடியாத வகையில் IC ஐ சூடாக்கியது மற்றும் வெப்ப மூழ்கி கிட்டத்தட்ட தடுக்கப்பட்டது. அத்தகைய வடிவமைப்பை நீங்கள் கண்டால், ஐசியிலிருந்து டிரான்சிஸ்டரை "அவிழ்த்து" முடிந்தவரை வளைப்பது நல்லது. இந்த அறிவிற்காக, கட்டுரையின் ஆசிரியருக்கு ப்ரோஸ்கிட் பல கருவிகளுடன் வழங்கப்பட்டது. நீங்கள் பார்க்க முடியும் என, எல்லாவற்றையும் ஒரு விரிவான முறையில் தீர்க்க வேண்டும் - சுற்றுகளை மட்டும் பார்க்கவும், ஆனால் ஒட்டுமொத்தமாக சீராக்கியின் வடிவமைப்பிலும் கவனம் செலுத்துங்கள்.
இன்னும் சில உள்ளன சுவாரஸ்யமான திட்டங்கள்எளிமையான PWM கட்டுப்படுத்திகள். எடுத்துக்காட்டாக, இயக்கி கொண்ட இரண்டு ஒற்றை செயல்பாட்டு பெருக்கி சுற்றுகள் [