Elektromotorji DC ima lahko neodvisno, vzporedno, zaporedno ali mešano vzbujanje (slika 6.1).
riž. 6.1. Vezja neodvisnih enosmernih elektromotorjev ( A),
vzporedno ( b), zaporedno ( V) in mešano ( G) navdušenje
(zgornji del diagrama "c" pripada diagramu "a")
V motorju z vzporednim vzbujanjem je navitje polja vzporedno priključeno na sponke armature. Toda tok, ki teče skozi to navitje, za razliko od toka armature, ni odvisen od obremenitve in je določen z napetostjo, ki se uporablja za armaturo, in skupnim uporom vzbujalnega vezja. Zaradi tega vzporedno vzbujeni elektromotor imenujemo tudi ločeno vzbujen elektromotor.
Navor M DC motor in njegov EMF E določeno s formulami
M= do F jaz jaz; E= kФω,
kjer je k konstrukcijski koeficient motorja;
Ф – magnetni pretok, Wb;
jaz I je armaturni tok, A.
ω – kotna hitrost, rad/s.
Elektromehanske enačbe ω = ƒ ( jaz i) in mehanski ω = ƒ ( M) značilnosti imajo obliko
ω = U/(kF) – ( R jaz + R p) / (k F) jaz jaz;
ω = U/(kF) – ( R jaz + R p) / (do 2 F 2) M.
Idealna kotna hitrost število vrtljajev v prostem teku(pri jaz i = 0 oz M = 0)
ω 0 = U/(kF).
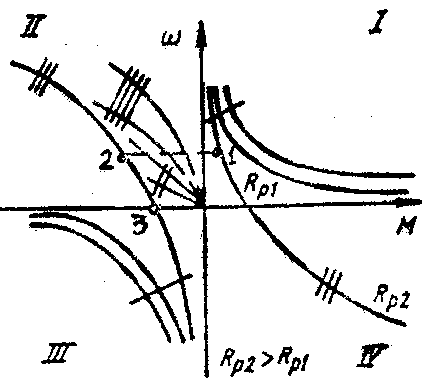
Na sl. 6.2 predstavlja mehanske značilnosti enosmernega motorja z neodvisno vzbujanje(DPT NV) v vseh načinih delovanja. Značilne točke značilnosti v motornem načinu so: idealna točka prostega teka (ω 0, M= 0); nazivna točka načina (ω n, M n); pika kratek stik (ω = 0, M = M Za).
Togost mehanske karakteristike je določena z vzbujevalnim tokom in uporom armaturnega vezja:
β = d M/dω = - do 2 Ф 2 / ( R jaz + R p) = - M k/ω.

riž. 6.2. Kombinirane mehanske značilnosti enosmernega motorja z neodvisnim vzbujanjem
Najvišja vrednost modula togosti ustreza naravni mehanski karakteristiki, saj je vzbujevalni tok enak nazivnemu in nastavitvenemu uporu R p = 0. Ker se upor reostata povečuje R p se naklon mehanske karakteristike poveča, kotna hitrost pa zmanjša. Pri dani vrednosti upora R p in nazivni navor M n kotna hitrost motorja
ω n.r = ω 0 (1 – jaz n ( R jaz + R p) / U n.
Za izračun mehanskih karakteristik je potrebno poznati upor armature motorja R i, ki je naveden v katalogih. Če ni tovarniških podatkov, vrednost R Približno najdem s formulo
R i = 0,5 (1 – ŋ n) ( U n/ jaz n).
Ker so mehanske značilnosti DPT NV enostavne, je za njihovo konstrukcijo dovolj, da imamo dve točki:
1) ω = ω 0 in M = 0,
2) ω = ω n (ali ω = ω n.r.) in M = M n.
Za DPT NV so možni naslednji trije načini električnega zaviranja.
1. Regenerativno zaviranje ki se pojavi, ko je število vrtljajev motorja višje od idealnega prostega teka. Je najbolj ekonomičen, saj se zavorna energija prenaša v električno omrežje. Mehanske karakteristike v tem načinu so nadaljevanje ustreznih značilnosti motornega načina v kvadrantu II. Tokokrog motorja se med regenerativnim zaviranjem ne spremeni.
2. Dinamično zaviranje. Armatura motorja je izključena iz omrežja in v kratkem stiku z uporom. V tem primeru se mehanska energija gibljivih delov (mehanizma in armature motorja) pretvarja v električno energijo, ki se v obliki toplotne energije izgubi v uporu armaturnega kroga. Mehanske lastnosti v tem načinu zaviranja potekajo skozi izhodišče koordinat (na sliki 6.2 - črte s tremi zarezami).
3. Zaviranje nazaj izvajajo na dva načina:
1) vnašanje velikega upora v armaturno vezje. V tem primeru navor motorja postane manjši od navora statične obremenitve M z. Motor se ustavi (v točki A) in nato pod vplivom navora M c se začne vrteti v drugo smer in razvije zavorni moment; v točki B nastopi ravnotežno stanje. Mehanske značilnosti so nadaljevanje ustreznih značilnosti motornega načina (na sliki 6.2 - črte s štirimi zarezami);
2) zaviranje s preklopom polarnosti navitja armature na poti. Motor deluje na točki 1 , po preklopu preklopi na reostatsko karakteristiko na točki 2. Ob črti 2–3 pride do zaviranja (črta s petimi kljukicami). Na točki 3 motor se ustavi in ga je treba izključiti iz električnega omrežja, da preprečite preklop v način motorja z vrtenjem v nasprotni smeri.
IN zaporedno vzbujen enosmerni motorde-niem Armaturni tok je tudi vzbujalni tok. Vzbujevalni magnetni pretok narašča z naraščajočo obremenitvijo, zaradi česar se kotna hitrost zmanjša v skladu z enačbo (6.1) in mehanske lastnosti motorja bodo mehke (slika 6.3). Zahvaljujoč temu NV DPT relativno enostavno in gladko premaguje preobremenitve in ima visoko začetni navor. Te lastnosti motorja omogočajo njegovo široko uporabo pri pogonskih transportnih mehanizmih. Mehanske lastnosti motorja se znatno zmehčajo, ko se v armaturno vezje vnese reostat (slika 6.3, črte z eno zarezo).
riž. 6.3. Mehanske lastnosti enosmernega motorja
s sekvenčnim vzbujanjem
Pri DPT PV načina regenerativnega zaviranja ni mogoče izvesti, ker nima idealnega prostega teka.
Dinamično zaviranje se lahko izvede po shemi s samo-vzbujanjem in z neodvisnim vzbujanjem. V prvem primeru sta armatura in navitje polja odklopljena iz omrežja in zaprta na reostat. Za izogibajte se razmagnetenju stroja, je potrebno preklopiti navitje (ali armaturo), tako da se smer toka v navitju ne spremeni. V tem primeru se stroj sam vzbuja za določeno upornost tokokroga armature samo pri določeni vrednosti kotna hitrost; ko je vznemirjen, ustvari zavorni moment. Mehanske karakteristike so nelinearne (na sliki 6.3 so krivulje s štirimi zarezami).
Mehanske lastnosti motorja v načinu dinamičnega zaviranja z neodvisnim vzbujanjem so podobne ustreznim karakteristikam motorja z neodvisnim vzbujanjem (na sliki 6.3 - črti z dvema zarezama). Našel ta način zaviranja široka uporaba, in prva metoda se redko uporablja, predvsem kot nujna metoda, na primer, ko omrežna napetost izgine.
Zaviranje s protipreklopom se izvaja, kot pri DPT NV, na dva načina:
1) vključitev visokega upora v armaturno vezje;
2) spreminjanje polarnosti navitja armature, pri čemer ostane smer toka v navitju polja nespremenjena.
Pri prvi metodi bo mehanska karakteristika nadaljevanje karakteristike, ki ustreza načinu motorja (na sliki 6.3 je črta s tremi zarezami). Pri drugi metodi se zaviranje izvaja vzdolž proge 1 –2–3 .
Regulacija hitrosti enosmernih električnih pogonov. Hitrost DPT NV je mogoče prilagoditi:
1) s spreminjanjem upora v armaturnem vezju;
2) spreminjanje pretoka vzbujanja;
3) spreminjanje napetosti, ki se napaja na armaturo.
Uredba po prvi metodi ima pomembne pomanjkljivosti:
– z zmanjšanjem kotne hitrosti se zmanjša togost mehanskih karakteristik, izgube moči v glavnem tokokrogu pa se povečajo;
– območje krmiljenja je omejeno, zlasti pri nizkih obremenitvah;
– gladkost in natančnost regulacije sta nizki.
Zaradi teh razlogov se ta način krmiljenja redko uporablja v pogonih DC.
Avtor: druga metoda Magnetni pretok je mogoče regulirati samo v smeri zmanjšanja (ker je v nominalnem načinu magnetni tokokrog motorja nasičen), kar ustreza povečanju hitrosti nad nominalno. Možno območje krmiljenja hitrosti ne presega 2 za standardni motor. Zgornja meja hitrosti je omejena z mehansko trdnostjo armaturnih elementov motorja - trakov armaturnega navitja in komutatorja.
Glavni način regulacije hitrosti NV DC je metoda, ki temelji na spreminjanju napetosti, ki se napaja na armaturo, ki se izvaja s posebnim nastavljivim pretvornikom. Tiristorski pretvorniki se uporabljajo predvsem kot samostojni viri energije. Togost mehanskih karakteristik pogona v sistemu »pretvornik – DPT NV« je skoraj konstantna. Mehanske značilnosti so družina ravnih črt, ki so med seboj vzporedne. Obseg, gladkost in natančnost regulacije so tu višji kot pri drugih načinih krmiljenja. zato ta sistem Pogon se uporablja za mehanizme, ki zahtevajo globok in gladek nadzor hitrosti.
Izračun dodatnih uporov v armaturnem vezju DPT NV.Če je znana naravna elektromehanska ali mehanska karakteristika 1 motor (sl. 6.4) in njegove podatke o potnem listu, nato izračunajte upor R d, ko je vključen v armaturno vezje, želeno umetno karakteristiko 2 bo šel skozi točko A z danimi koordinatami ω in, jaz in ali ω in, M in, je mogoče izvesti z uporabo naslednjih najpogostejših metod.

riž. 6.4. Značilnosti DPT NV za izračun vrednosti
nastavitveni upori
Metoda sorazmerja. Zapišimo razmerje padcev hitrosti s tokom jaz in ali trenutek M in na naravnem Δω e ter želenem umetnem Δω in značilnostih:
Δω e / Δω u = jaz in R jaz / ( jaz In ( R jaz + R d)) = R jaz / ( R jaz + R d).
Nato zahtevano količino
R d = R i (Δω in / Δω e – 1).
Segmentna metoda ne zahteva poznavanja lastne vrednosti upora motorja R I (poleg tega je njegovo vrednost mogoče določiti z znano naravno značilnostjo).
Zapišimo izraz za hitrost motorja pri dani umetni karakteristiki (glej sliko 6.4) pri nazivnem toku jaz n, trenutek M n, magnetni pretok Fn in napetost U n:
ω in = U n / (kF n) (1 – jaz n R/ U n),
kje U n / (kF n) = ω 0 .
ω in = ω 0 (1 – R / R n).
Tukaj R n = U n/ jaz n – tako imenovani nominalni upor, ki je osnovna vrednost za izračune, Ohm.
Razmerje
R / U n = (ω 0 – ω u) / ω 0 = δ
odraža pomembno lastnost NV DPT: relativna razlika hitrosti δ = Δω / ω 0 je enaka relativni aktivni upornosti armaturnega vezja R / R n.
Označimo na sl. 6.4 karakteristične točke A, b,z, d in upoštevajte, da je ω 0 – ω in = Δω = ac, ω 0 = oglas. Potem R = R n Δω / ω 0 = R n ac/oglas; R d = R n bz/oglas; R jaz = R n Ab /oglas.
Tako najti R d najprej morate določiti dolžine segmentov na podlagi značilnosti bz in oglas pri nazivnem toku ali navoru in izračunajte nazivni upor R n = U n/ jaz n.
Izračun dodatnih uporov se lahko izvede tudi z uporabo naslednjih formul za dani dovoljeni tok jaz dodatni, ki je določen z vrednostjo dovoljenega momenta M dodatni ali pogoji za speljevanje, vzvratno vožnjo in zaviranje.
Odpornost upora R d1 na začetku ( E = 0)
R d1 = ( U / jaz dodatno) – R jaz
Upor R d2 med dinamičnim zaviranjem
R d2 = ( E / jaz dodatno) – R i ≈ ( U / jaz dodatno) – R jaz).
Odpornost upora R d3 med vzvratno ali protizaviranjem
R d3 = (( U + E) / jaz dodatno) – R i ≈ (2 U / jaz dodatno) – R jaz
Primer . DPT NV tipa PBST-53 ima naslednje podatke o potnem listu: R n = 4,8 kW; n n = 1500 vrt/min; U n = 220 V; jaz n = 24,2 A; R i = 0,38 ohma; jaz v.n = 0,8 A. Potrebno je določiti:
1) upornost upora, katerega vključitev v vezje armature motorja bo zagotovila prehod umetne mehanske karakteristike skozi točko s koordinatami ω in = 90 rad / s, M n = 25 Nm;
2) upornost uporov, katerih vključitev bo omejila tok med zagonom in zaviranjem s povratnim preklopom na raven jaz dodatno = 3 jaz n.
Enosmerni motorji imajo lahko neodvisno, vzporedno, zaporedno ali mešano vzbujanje (slika 6.1).
riž. 6.1. Vezja neodvisnih enosmernih elektromotorjev ( A),
vzporedno ( b), zaporedno ( V) in mešano ( G) navdušenje
(zgornji del diagrama "c" pripada diagramu "a")
V motorju z vzporednim vzbujanjem je navitje polja vzporedno priključeno na sponke armature. Toda tok, ki teče skozi to navitje, za razliko od toka armature, ni odvisen od obremenitve in je določen z napetostjo, ki se uporablja za armaturo, in skupnim uporom vzbujalnega vezja. Zaradi tega vzporedno vzbujeni elektromotor imenujemo tudi ločeno vzbujen elektromotor.
Navor M DC motor in njegov EMF E določeno s formulami
M= do F jaz jaz; E= kФω,
kjer je k konstrukcijski koeficient motorja;
Ф – magnetni pretok, Wb;
jaz I je armaturni tok, A.
ω – kotna hitrost, rad/s.
Elektromehanske enačbe ω = ƒ ( jaz i) in mehanski ω = ƒ ( M) značilnosti imajo obliko
ω = U/(kF) – ( R jaz + R p) / (k F) jaz jaz;
ω = U/(kF) – ( R jaz + R p) / (do 2 F 2) M.
Kotna hitrost idealnega prostega teka (pri jaz i = 0 oz M = 0)
ω 0 = U/(kF).
Na sl. 6.2 prikazuje mehanske značilnosti enosmernega motorja z neodvisnim vzbujanjem (DC NV) v vseh načinih delovanja. Značilne točke značilnosti v motornem načinu so: idealna točka prostega teka (ω 0, M= 0); nazivna točka načina (ω n, M n); točka kratkega stika (ω = 0, M = M Za).
Togost mehanske karakteristike je določena z vzbujevalnim tokom in uporom armaturnega vezja:
β = d M/dω = - do 2 Ф 2 / ( R jaz + R p) = - M k/ω.
riž. 6.2. Kombinirane mehanske značilnosti enosmernega motorja z neodvisnim vzbujanjem
Najvišja vrednost modula togosti ustreza naravni mehanski karakteristiki, saj je vzbujevalni tok enak nazivnemu in nastavitvenemu uporu R p = 0. Ker se upor reostata povečuje R p se naklon mehanske karakteristike poveča, kotna hitrost pa zmanjša. Pri dani vrednosti upora R p in nazivni navor M n kotna hitrost motorja
ω n.r = ω 0 (1 – jaz n ( R jaz + R p) / U n.
Za izračun mehanskih karakteristik je potrebno poznati upor armature motorja R i, ki je naveden v katalogih. Če ni tovarniških podatkov, vrednost R Približno najdem s formulo
R i = 0,5 (1 – ŋ n) ( U n/ jaz n).
Ker so mehanske značilnosti DPT NV enostavne, je za njihovo konstrukcijo dovolj, da imamo dve točki:
1) ω = ω 0 in M = 0,
2) ω = ω n (ali ω = ω n.r.) in M = M n.
Za DPT NV so možni naslednji trije načini električnega zaviranja.
1. Regenerativno zaviranje ki se pojavi, ko je število vrtljajev motorja višje od idealnega prostega teka. Je najbolj ekonomičen, saj se zavorna energija prenaša v električno omrežje. Mehanske karakteristike v tem načinu so nadaljevanje ustreznih značilnosti motornega načina v kvadrantu II. Tokokrog motorja se med regenerativnim zaviranjem ne spremeni.
2. Dinamično zaviranje. Armatura motorja je izključena iz omrežja in v kratkem stiku z uporom. V tem primeru se mehanska energija gibljivih delov (mehanizma in armature motorja) pretvarja v električno energijo, ki se v obliki toplotne energije izgubi v uporu armaturnega kroga. Mehanske lastnosti v tem načinu zaviranja potekajo skozi izhodišče koordinat (na sliki 6.2 - črte s tremi zarezami).
3. Zaviranje nazaj izvajajo na dva načina:
1) vnašanje velikega upora v armaturno vezje. V tem primeru navor motorja postane manjši od navora statične obremenitve M z. Motor se ustavi (v točki A) in nato pod vplivom navora M c se začne vrteti v drugo smer in razvije zavorni moment; v točki B nastopi ravnotežno stanje. Mehanske značilnosti so nadaljevanje ustreznih značilnosti motornega načina (na sliki 6.2 - črte s štirimi zarezami);
2) zaviranje s preklopom polarnosti navitja armature na poti. Motor deluje na točki 1 , po preklopu preklopi na reostatsko karakteristiko na točki 2. Ob črti 2–3 pride do zaviranja (črta s petimi kljukicami). Na točki 3 motor se ustavi in ga je treba izključiti iz električnega omrežja, da preprečite preklop v način motorja z vrtenjem v nasprotni smeri.
IN zaporedno vzbujen enosmerni motorde-niem Armaturni tok je tudi vzbujalni tok. Vzbujevalni magnetni pretok narašča z naraščajočo obremenitvijo, zaradi česar se kotna hitrost zmanjša v skladu z enačbo (6.1) in mehanske lastnosti motorja bodo mehke (slika 6.3). Zahvaljujoč temu NV DPT razmeroma enostavno in gladko premaguje preobremenitve in ima visok začetni navor. Te lastnosti motorja omogočajo njegovo široko uporabo pri pogonu transportnih mehanizmov. Mehanske lastnosti motorja se znatno zmehčajo, ko se v armaturno vezje vnese reostat (slika 6.3, črte z eno zarezo).
riž. 6.3. Mehanske lastnosti enosmernega motorja
s sekvenčnim vzbujanjem
Pri DPT PV načina regenerativnega zaviranja ni mogoče izvesti, ker nima idealnega prostega teka.
Dinamično zaviranje se lahko izvede po shemi s samo-vzbujanjem in z neodvisnim vzbujanjem. V prvem primeru sta armatura in navitje polja odklopljena iz omrežja in zaprta na reostat. Za izogibajte se razmagnetenju stroja, je potrebno preklopiti navitje (ali armaturo), tako da se smer toka v navitju ne spremeni. V tem primeru se stroj samovzbuja za dano upornost armaturnega kroga samo pri določeni vrednosti kotne hitrosti; ko je vznemirjen, ustvari zavorni moment. Mehanske karakteristike so nelinearne (na sliki 6.3 so krivulje s štirimi zarezami).
Mehanske lastnosti motorja v načinu dinamičnega zaviranja z neodvisnim vzbujanjem so podobne ustreznim karakteristikam motorja z neodvisnim vzbujanjem (na sliki 6.3 - črti z dvema zarezama). Ta metoda zaviranja se pogosto uporablja, vendar se prva metoda redko uporablja, predvsem kot nujna metoda, na primer, ko omrežna napetost izgine.
Zaviranje s protipreklopom se izvaja, kot pri DPT NV, na dva načina:
1) vključitev visokega upora v armaturno vezje;
2) spreminjanje polarnosti navitja armature, pri čemer ostane smer toka v navitju polja nespremenjena.
Pri prvi metodi bo mehanska karakteristika nadaljevanje karakteristike, ki ustreza načinu motorja (na sliki 6.3 je črta s tremi zarezami). Pri drugi metodi se zaviranje izvaja vzdolž proge 1 –2–3 .
Regulacija hitrosti enosmernih električnih pogonov. Hitrost DPT NV je mogoče prilagoditi:
1) s spreminjanjem upora v armaturnem vezju;
2) spreminjanje pretoka vzbujanja;
3) spreminjanje napetosti, ki se napaja na armaturo.
Uredba po prvi metodi ima pomembne pomanjkljivosti:
– z zmanjšanjem kotne hitrosti se zmanjša togost mehanskih karakteristik, izgube moči v glavnem tokokrogu pa se povečajo;
– območje krmiljenja je omejeno, zlasti pri nizkih obremenitvah;
– gladkost in natančnost regulacije sta nizki.
Zaradi teh razlogov se ta način krmiljenja redko uporablja v pogonih DC.
Avtor: druga metoda Magnetni pretok je mogoče regulirati samo v smeri zmanjšanja (ker je v nominalnem načinu magnetni tokokrog motorja nasičen), kar ustreza povečanju hitrosti nad nominalno. Možno območje krmiljenja hitrosti ne presega 2 za standardni motor. Zgornja meja hitrosti je omejena z mehansko trdnostjo armaturnih elementov motorja - trakov armaturnega navitja in komutatorja.
Glavni način regulacije hitrosti NV DC je metoda, ki temelji na spreminjanju napetosti, ki se napaja na armaturo, ki se izvaja s posebnim nastavljivim pretvornikom. Tiristorski pretvorniki se uporabljajo predvsem kot samostojni viri energije. Togost mehanskih karakteristik pogona v sistemu »pretvornik – DPT NV« je skoraj konstantna. Mehanske značilnosti so družina ravnih črt, ki so med seboj vzporedne. Obseg, gladkost in natančnost regulacije so tu višji kot pri drugih načinih krmiljenja. Zato se ta pogonski sistem uporablja za mehanizme, ki zahtevajo globok in gladek nadzor hitrosti.
Izračun dodatnih uporov v armaturnem vezju DPT NV.Če je znana naravna elektromehanska ali mehanska karakteristika 1 motor (sl. 6.4) in njegove podatke o potnem listu, nato izračunajte upor R d, ko je vključen v armaturno vezje, želeno umetno karakteristiko 2 bo šel skozi točko A z danimi koordinatami ω in, jaz in ali ω in, M in, je mogoče izvesti z uporabo naslednjih najpogostejših metod.
riž. 6.4. Značilnosti DPT NV za izračun vrednosti
nastavitveni upori
Metoda sorazmerja. Zapišimo razmerje padcev hitrosti s tokom jaz in ali trenutek M in na naravnem Δω e ter želenem umetnem Δω in značilnostih:
Δω e / Δω u = jaz in R jaz / ( jaz In ( R jaz + R d)) = R jaz / ( R jaz + R d).
Nato zahtevano količino
R d = R i (Δω in / Δω e – 1).
Segmentna metoda ne zahteva poznavanja lastne vrednosti upora motorja R I (poleg tega je njegovo vrednost mogoče določiti z znano naravno značilnostjo).
Zapišimo izraz za hitrost motorja pri dani umetni karakteristiki (glej sliko 6.4) pri nazivnem toku jaz n, trenutek M n, magnetni pretok Fn in napetost U n:
ω in = U n / (kF n) (1 – jaz n R/ U n),
kje U n / (kF n) = ω 0 .
ω in = ω 0 (1 – R / R n).
Tukaj R n = U n/ jaz n – tako imenovani nominalni upor, ki je osnovna vrednost za izračune, Ohm.
Razmerje
R / U n = (ω 0 – ω u) / ω 0 = δ
odraža pomembno lastnost NV DPT: relativna razlika hitrosti δ = Δω / ω 0 je enaka relativni aktivni upornosti armaturnega vezja R / R n.
Označimo na sl. 6.4 karakteristične točke A, b,z, d in upoštevajte, da je ω 0 – ω in = Δω = ac, ω 0 = oglas. Potem R = R n Δω / ω 0 = R n ac/oglas; R d = R n bz/oglas; R jaz = R n Ab /oglas.
Tako najti R d najprej morate določiti dolžine segmentov na podlagi značilnosti bz in oglas pri nazivnem toku ali navoru in izračunajte nazivni upor R n = U n/ jaz n.
Izračun dodatnih uporov se lahko izvede tudi z uporabo naslednjih formul za dani dovoljeni tok jaz dodatni, ki je določen z vrednostjo dovoljenega momenta M dodatni ali pogoji za speljevanje, vzvratno vožnjo in zaviranje.
Odpornost upora R d1 na začetku ( E = 0)
R d1 = ( U / jaz dodatno) – R jaz
Upor R d2 med dinamičnim zaviranjem
R d2 = ( E / jaz dodatno) – R i ≈ ( U / jaz dodatno) – R jaz).
Odpornost upora R d3 med vzvratno ali protizaviranjem
R d3 = (( U + E) / jaz dodatno) – R i ≈ (2 U / jaz dodatno) – R jaz
Primer . DPT NV tipa PBST-53 ima naslednje podatke o potnem listu: R n = 4,8 kW; n n = 1500 vrt/min; U n = 220 V; jaz n = 24,2 A; R i = 0,38 ohma; jaz v.n = 0,8 A. Potrebno je določiti:
1) upornost upora, katerega vključitev v vezje armature motorja bo zagotovila prehod umetne mehanske karakteristike skozi točko s koordinatami ω in = 90 rad / s, M n = 25 Nm;
2) upornost uporov, katerih vključitev bo omejila tok med zagonom in zaviranjem s povratnim preklopom na raven jaz dodatno = 3 jaz n.
Ministrstvo za izobraževanje in znanost Ruska federacija
Državna izobraževalna ustanova za visoko strokovno izobraževanje Yuzhno-Uralsky državna univerza
Podružnica v Zlatoustu
DC motorji
ZD-431.583.270102
Izpolnil: Sharipova Yu.R.
Skupina: ZD-431
Preveril: Rumyantsev.E.
1. Uvod
2. Zasnova in princip delovanja enosmernih motorjev
3. Zagon motorjev
4. Tehnični podatki motorjev
5. Učinkovitost enosmernih motorjev
6 Značilnosti enosmernega motorja
6.1 Značilnosti delovanja
6.2 Mehanske lastnosti
7. Seznam uporabljene literature
1. Uvod
Električni stroji Napajanje z enosmernim tokom se pogosto uporablja v različnih panogah.
Znatno razširjenost elektromotorjev na enosmerni tok je razloženo z njihovimi dragocenimi lastnostmi: visokim zagonskim, zavornim in preobremenitvenim momentom, relativno visoko hitrostjo, kar je pomembno pri vzvratni vožnji in zaviranju, ter zmožnostjo širokega in gladkega nadzora hitrosti vrtenja.
Enosmerni elektromotorji se uporabljajo za nastavljive pogone, na primer za pogon različnih obdelovalnih strojev in mehanizmov. Moč teh elektromotorjev doseže več sto kilovatov. V povezavi z avtomatizacijo nadzora proizvodnih procesov in mehanizmov širi področje uporabe enosmernih motorjev majhne moči splošno uporabo moč od enot do sto vatov.
Glede na napajalni tokokrog so vzbujalna navitja enosmernega stroja razdeljena na več vrst (z neodvisnim, vzporednim, serijskim in mešanim vzbujanjem).
Letna proizvodnja enosmernih strojev v Ruski federaciji je bistveno manjša od proizvodnje strojev AC, kar je posledica visokih stroškov enosmernih motorjev.
Sprva so bili ustvarjeni enosmerni stroji. Kasneje so jih večinoma nadomestili stroji na izmenični tok. Zahvaljujoč zmožnosti gladke in ekonomične regulacije hitrosti vrtenja, DC motorji ohranjajo svojo dominantno vlogo v transportu, za pogon metalurških strojev, žerjavov in dvižnih mehanizmov. V sistemih za avtomatizacijo se stroji na enosmerni tok pogosto uporabljajo kot pogonski motorji, motorji za pogon samosnemalnih mehanizmov, kot tahogeneratorji in ojačevalniki električnih strojev.
2. Zasnova in princip delovanja enosmernih motorjev
Zgradba enosmernih strojev (generatorjev in motorjev) je v poenostavljeni obliki prikazana na sliki 1. Glavni 2 in dodatni 4 poli so pritrjeni na jekleno ohišje 1 statorja stroja. Na glavnih polih je vzbujevalno navitje 3, na dodatnih polih je navitje dodatnih polov 5. Vzbujevalno navitje ustvarja magnetni pretok F stroja.
Slika 1
Na gred 10 motorja je pritrjen cilindrični magnetni tokokrog, v utorih katerega je navitje armature 7 pritrjeno na komutator 9. Nanj so pritisnjene tudi fiksne ščetke Komutator pritrjen na gred motorja je sestavljen iz številnih bakrenih plošč S pomočjo komutatorja in ščetk je navitje armature povezano z zunanjim električni tokokrog. V motorjih služijo tudi za pretvorbo toka zunanjega kroga, ki ima konstantno smer, v tok, ki se spreminja v smeri v vodnikih armaturnega navitja.
Dodatni poli z navitjem, ki se nahaja na njih, zmanjšujejo iskrenje med ščetkami in komutatorjem stroja. Navitje dodatnih polov je zaporedno povezano z navitjem armature in naprej električni diagrami pogosto ni upodobljen.
Za zmanjšanje izgub moči je armaturno magnetno vezje ločeno jeklene pločevine. Vsa navitja so izdelana iz izolirana žica. Poleg motorjev z dvema glavnima poloma obstajajo enosmerni stroji s štirimi ali več glavnimi poli. Hkrati se ustrezno poveča število dodatnih polov in kompletov ščetk.
Če je motor priklopljen enosmerna napetost, nato pa ob interakciji magnetno polje, ki ga ustvari vzbujalno navitje, in tok v vodnikih armature, se pojavi navor, ki deluje na armaturo:
![]() (1)
(1)
kjer je K M koeficient, odvisen od konstrukcijski parametri avtomobili; F - magnetni pretok enega pola; I I - tok armature.
Če navor motorja pri n = 0 preseže zavorni moment, s katerim je motor obremenjen, se bo armatura začela vrteti. Ko se vrtilna hitrost n poveča, se EMF, induciran v armaturi, poveča. To vodi do zmanjšanja toka armature:
![]() (3)
(3)
kjer je r I upor armature.
Posledica zmanjšanja toka I I je zmanjšanje navora motorja. Ko sta navor motorja in obremenitve enaka, se hitrost vrtenja neha spreminjati.
Smer navora motorja in s tem smer vrtenja armature je odvisna od smeri magnetnega pretoka in toka v vodnikih navitja armature. Če želite spremeniti smer vrtenja motorja, morate spremeniti smer armaturnega toka ali toka polja.
3. Zagon motorjev
Iz formule (3) sledi, da v prvem trenutku po vklopu motorja v omrežju enosmerne napetosti, tj. ko in
Ker je upor r I majhen, je lahko armaturni tok 10-30-krat večji od nazivnega toka motorja, kar je nesprejemljivo, saj bo povzročilo močno iskrenje in uničenje komutatorja. Poleg tega se pri takem toku pojavi nesprejemljivo visok navor motorja, pri pogostih zagonih pa je možno pregrevanje navitja armature.
Za zmanjšanje zagonskega toka v armaturnem vezju je vključen začetni upor, katerega upor se zmanjša na nič, ko se število vrtljajev motorja poveča. Če je zagon motorja avtomatiziran, je zagonski upor sestavljen iz več stopenj, ki se zaporedno izklopijo, ko se hitrost vrtenja poveča.
Zagonski tok armature
![]()
Ko se motor pospeši, se EMF v navitju armature poveča in kot izhaja iz formule (3), to vodi do zmanjšanja toka armature I R. Zato se s povečanjem števila vrtljajev motorja upor v armaturnem krogu zmanjša. Tako da z razmeroma majhno začetni tok Da bi dosegli velik začetni navor, se motor zažene z največjim magnetnim tokom. Posledično mora biti vzbujalni tok ob zagonu največji dovoljeni, tj. nominalno.
4.Tehnični podatki motorjev
Potni list motorja in referenčna literatura za enosmerne motorje vsebujeta naslednje tehnične podatke: nazivna napetost U in, moč P n, hitrost vrtenja n n, tok I n, učinkovitost.
Z nazivno U n mislimo na napetost, za katero sta zasnovana armaturno navitje in kolektor, v večini primerov pa tudi vzporedno navitje polja. Ob upoštevanju nazivne napetosti so izbrani električni izolacijski materiali motorja.
Nazivni tok I n – največ dopustni tok(porablja se iz omrežja), pri kateri se motor segreje do najvišje dopustna temperatura, ki deluje v načinu (dolgoročno, občasno, kratkoročno), za katerega je zasnovan:
![]()
kjer je I yang tok armature pri nazivni obremenitvi; I vn – tok vzbujalnega navitja pri nazivni napetosti.
Upoštevati je treba, da je vzbujalni tok Ivn motorja z vzporednim vzbujanjem relativno majhen, zato se pri nazivni obremenitvi običajno vzame
Nazivna moč P n je moč, ki jo razvije motor na gredi pri delovanju z nazivno obremenitvijo (navorom) in nazivno hitrostjo n n.
Hitrost vrtenja n n in učinkovitost ustrezata delovanju motorja s tokom I n, napetostjo U n brez dodatnih uporov v tokokrogih motorja.
IN splošni primer moč gredi P 2, navor M in hitrost vrtenja n so povezani z razmerjem:
Moč P 1, ki jo porabi motor iz omrežja, vrednosti P 2, učinkovitost, U, I so povezani z razmerji:
Očitno ta razmerja veljajo tudi za nazivni način delovanja motorja.
5. Učinkovitost motorja DC
Koeficient koristno dejanje je najpomembnejši pokazatelj enosmernih motorjev. Večja kot je, manjša sta moč P in tok I, ki ju motor porabi hkrati iz omrežja mehanska moč. IN splošni pogled Odvisnost je:
![]() (9)
(9)
kje je izguba v navitju armature;
- izgube v vzbujalnem navitju;
Motorji so zasnovani tako, da je največja vrednost izkoristka v območju blizu nazivne moči. Delovanje motorjev pri nizkih obremenitvah je nezaželeno zaradi majhnih vrednosti r i. Vrednosti učinkovitosti motorja z na različne načine vzbujanja in moči od 1 do 100 kW pri nazivni obremenitvi so različni in povprečno 0,8.
6.Karakteristike enosmernih motorjev
6.1. Značilnosti delovanja
Delavci se imenujejo prilagoditev, hitrost, navor in učinkovitost. lastnosti.
Regulacijska lastnost
Regulacijska karakteristika predstavlja odvisnost hitrosti vrtenja P od vzbujalnega toka Ib v primeru, ko armaturni tok Ia in omrežna napetost U ostaneta nespremenjena, to je n=f(Iv) pri Ia=const in U=const.
Dokler jeklo magnetnega pogona stroja ni nasičeno, se pretok F spreminja sorazmerno z vzbujalnim tokom Iв. V tem primeru je krmilna karakteristika hiperbolična. Ko se nasiči pri visokih tokovih Iv, se karakteristika približa linearni (slika 2). Pri nizkih vrednostih toka Iv se hitrost vrtenja močno poveča. Zato ob prekinitvi vzbujalnega tokokroga vzporedno vzbujenega motorja (Iv = 0) njegova hitrost vrtenja doseže nesprejemljive meje, kot pravijo: "Motor divja." Izjema so lahko mikromotorji, ki imajo razmeroma velik navor v prostem teku M0.

riž. 2. Značilnosti krmiljenja motorja
V motorjih sekvenčno vzbujanje Iв = Iа. Pri nizkih obremenitvah je armaturni tok Ia majhen in hitrost vrtenja je lahko previsoka, zato sta zagon in delovanje pri nizkih obremenitvah nesprejemljiva. Mikromotorji so pač taki. v prejšnjem primeru lahko predstavlja izjemo.
Lastnosti hitrosti.
Karakteristike hitrosti dajejo odvisnost hitrosti vrtenja n uporabna moč P2 na gredi motorja, če napetost U omrežja in upor rv nastavitvenega reostata vzbujalnega kroga ostaneta nespremenjena, to je n=f(P2), pri čemer je U=const in rv = const.
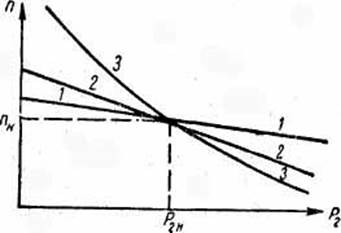
riž. 3. Značilnosti hitrosti
Z naraščanjem armaturnega toka in večanjem mehanske obremenitve vzporednega vzbujalnega motorja se sočasno poveča padec napetosti v armaturi in pojavi se reakcija armature, ki običajno deluje razmagnetno. Prvi razlog teži k zmanjšanju hitrosti vrtenja motorja, drugi - k povečanju. Običajno ima večji učinek učinek padca napetosti v armaturi. Zato ima hitrostna karakteristika motorja s paralelnim vzbujanjem rahlo padajoč značaj (krivulja 1, slika 3).
V serijsko navitem motorju je armaturni tok vzbujalni tok. Posledično ima hitrostna karakteristika motorja s sekvenčnim vzbujanjem značaj, ki je blizu hiperboličnemu. Ko se obremenitev poveča, ko postane magnetno vezje nasičeno, postane karakteristika bolj linearna (krivulja 3 na sliki 3).
Pri sestavljenem motorju, ko so navitja ustrezno vključena, zavzema hitrostna karakteristika vmesni položaj med karakteristikama vzporednega in serijskega vzbujalnega motorja (krivulja 2).
Značilnosti trenutka.
Karakteristike vrtilnega momenta kažejo, kako se vrtilni moment M spreminja s spremembo uporabne moči P2 na gredi motorja, če ostaneta omrežna napetost U in upor nastavitvenega reostata rv v vzbujalnem krogu nespremenjena, tj. M = f(P2), z U = konst, rv = konst.
Koristni navor na gredi motorja
Če se hitrost vrtenja motorja s paralelnim vzbujanjem ne bi spreminjala z obremenitvijo, bi bila odvisnost navora Mmech od uporabne moči grafično predstavljena z ravno črto, ki poteka skozi izhodišče koordinat. V resnici se hitrost vrtenja z naraščajočo obremenitvijo zmanjšuje. Zato se karakteristika koristnega navora nekoliko upogne navzgor (krivulja 2, slika 4). Hkrati pa krivulja elektromagnetni moment M preide nad krivuljo koristnega navora Mmech za konstantno količino, ki je enaka navoru M0 v prostem teku (krivulja 1).

riž. 4. Značilnosti trenutka
V zaporedno vzbujenem motorju se tip karakteristike vrtilnega momenta približuje paraboličnemu, saj se sprememba vrtilnega momenta od bremenskega toka pojavi v skladu s paraboličnim zakonom, dokler jeklo ni nasičeno. Ko pride do nasičenja, postane odvisnost bolj linearna (krivulja 4). V sestavljenem motorju zavzema karakteristika navora (krivulja 3) vmesni položaj med karakteristikama motorja z vzporednim in serijskim vzbujanjem.
Značilnosti sprememb učinkovitosti.
Krivulja učinkovitosti glede na obremenitev ima značilno obliko za vse motorje (slika 5). Krivulja poteka skozi izvor in hitro narašča, ko se koristna moč poveča na 1/4 nazivne moči. Pri moči P2, ki je enaka približno 2/3 nazivne moči, učinkovitost običajno doseže največjo vrednost. Ko se obremenitev poveča na nazivno vrednost, učinkovitost ostane nespremenjena ali rahlo pade.
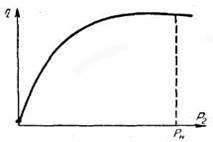
riž. 5. Spreminjanje učinkovitosti motorja
6.2 Mehanske lastnosti
Najpomembnejša lastnost motor je mehanski n(M). Prikazuje, kako je vrtilna frekvenca motorja odvisna od razvitega navora. Če so navitja motorja povezana nazivne napetosti in v njegovih tokokrogih ni dodatnih uporov, potem ima motor mehansko karakteristiko, ki se imenuje naravna. Na naravni karakteristiki je točka, ki ustreza nazivnim podatkom motorja (M n, P i itd.). Če je napetost na navitju armature manjša od nazivne napetosti ali I in< I вн, то двигатель будет иметь различные искусственные механические характеристики. На этих характеристиках двигатель работает при пуске, торможении, реверсе и регулировании частоты вращения.
S pretvorbo izraza (3) glede na hitrost vrtenja dobimo enačbo elektromehanske karakteristike n(I i):
![]() (7)
(7)
Po zamenjavi toka I i v enačbi (7) po formuli (1) dobimo enačbo za mehansko karakteristiko n(M):
![]() (8)
(8)
Ko je Ф = const, sta elektromehanska n(I i) in mehanska n(M) karakteristika motorja z vzporednim vzbujanjem ravne črte. Ker se magnetni pretok zaradi reakcije armature nekoliko spremeni, so karakteristike dejansko nekoliko drugačne od ravnih.
V prostem teku (M = 0) ima motor vrtilno frekvenco v prostem teku, določeno s prvim členom enačbe (8). Ko se obremenitev poveča, se n zmanjša. Kot izhaja iz enačbe (8), je to razloženo s prisotnostjo upora armature r.
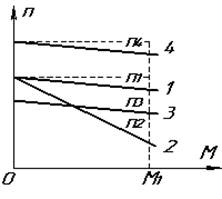
Ker r i ni velik, se hitrost vrtenja motorja z naraščanjem navora malo spreminja, motor pa ima togo naravno mehansko karakteristiko (slika 6, karakteristika 1).
Iz enačbe (8) sledi, da lahko hitrost vrtenja pri določeni konstantni obremenitvi (M = const) prilagodimo na tri načine:
a) sprememba upora armaturnega tokokroga;
b) spreminjanje magnetnega pretoka motorja;
c) spreminjanje napetosti na sponkah armature.
riž. 6 Mehanske lastnosti
Za regulacijo hitrosti vrtenja na prvi način v armaturnem krogu. je treba vključiti dodatni upor r d. Potem je treba upor v enačbi (8) nadomestiti z r i + r d.
Kot izhaja iz enačbe (8), je hitrost vrtenja n povezana z uporom armaturnega tokokroga r i + r d pri stalni obremenitvi (M = const) z linearno odvisnostjo, tj. Ko se upor poveča, se hitrost vrtenja zmanjša. Različne upornosti rd ustrezajo različnim umetnim mehanskim karakteristikam, od katerih je ena prikazana na sliki 2 (karakteristika 2). Z uporabo karakteristike 2 lahko pri danem navoru M1 dobite hitrost vrtenja n2.
Spreminjanje hitrosti vrtenja na drugi način se izvede z uporabo nastavljivega napetostnega vira UD2. S spreminjanjem njegove napetosti z regulatorjem R2 lahko spremenite vzbujevalni tok I V in s tem magnetni pretok motorja. Kot je razvidno iz enačbe (8), je pri konstantni obremenitvi (M = const) hitrost vrtenja kompleksno odvisna od magnetnega pretoka F. Analiza enačbe (8) kaže, da v določenem območju sprememb magnetnega pretoka F, zmanjšanje slednjega povzroči povečanje hitrosti vrtenja. To območje spreminjanja pretoka se uporablja pri uravnavanju hitrosti vrtenja.
Vsaka vrednost magnetnega pretoka ustreza umetni mehanski karakteristiki motorja, od katerih je ena prikazana na sliki 2 (karakteristika 4). Z uporabo karakteristike 4 pri vrtilnem momentu M1 lahko dobite hitrost vrtenja n4.
Za uravnavanje hitrosti vrtenja s spreminjanjem napetosti na sponkah armature je potreben razmeroma močan nastavljiv vir napetosti. Vsaka vrednost napetosti ustreza umetni mehanski karakteristiki motorja, od katerih je ena prikazana v Slika 2(značilnost 3). Z uporabo karakteristike 3 pri danem navoru M1 lahko dobite hitrost vrtenja n3.
Seznam uporabljene literature
1. Katsman M.M. Električni stroji. -M .: Višje. šola, 1993.
2. Kopylov I.P. Električni stroji. -M .: Energoatomizdat, 1986