Ministrstvo za izobraževanje in znanost Ruske federacije
Zvezna državna proračunska izobraževalna ustanova
visoka strokovna izobrazba
"Južna Uralska državna univerza"
Fakulteta za avtomobilizem in traktorje
Oddelek za "Operacijo avtomobilskega prometa"
Asinhroni motor IZVLEČEK discipline “Splošna elektrotehnika in elektronika”
Preveril ________ /Krymsky V.V./_______________20____ Avtor dela: študent skupine AT-262______________ Povzetek je zaščiten z oceno (z besedami, številkami) _______________20____.
Uvod. 4
Asinhroni elektromotorji. 5
Rotor z veverico. Rotor asinhronega stroja s kletko 6
Kratkostično navitje rotorja, ki se zaradi zunanje podobnosti zasnove pogosto imenuje "veveričja kletka", je sestavljeno iz bakrenih ali aluminijastih palic, ki so na koncih kratko povezane z dvema obročema. Palice tega navitja so vstavljene v utore jedra rotorja. V majhnih in srednja moč
Rotor je običajno izdelan z vlivanjem staljene aluminijeve zlitine v reže v jedru rotorja. Skupaj s palicami veveričjih kletk so uliti kratkostični obroči in končne lopatice, ki opravljajo samoprezračevanje samega rotorja in prezračevanje stroja kot celote. V strojih z veliko močjo je "veveričja kletka" izdelana iz bakrenih palic, katerih konci so zvarjeni v kratkostične obroče. 6
Metode krmiljenja asinhronskega motorja. 6 Princip delovanja. 9
asinhroni elektromotorji
Drsni rotor. 10 Fazni rotor ima trifazni (in splošni primer
- večfazno) navitje, običajno povezano v konfiguraciji zvezde in izvedeno na drsnih obročih, ki se vrtijo z gredjo stroja. Z uporabo kovinsko-grafitnih ščetk, ki drsijo vzdolž teh obročev v tokokrog navitja rotorja: 10
Zagon asinhronega motorja z navitim rotorjem. 11
Metode krmiljenja asinhronskega motorja. 12
Reostatska regulacija. 12
Osnovne okvare asinhronskega motorja z navitim rotorjem 14
Sklep 15
Reference 16
Uvod.
Rotor enofaznega motorja je po konstrukciji enak kot trifazni asinhronski motor. Enofazni asinhroni elektromotorji se pogosto uporabljajo visoka moč- do 2 kW. V gospodinjskih električnih napravah se uporabljajo enofazni asinhroni elektromotorji z močjo do 500 W. Pri električnih enofaznih asinhronih motorjih ni začetnega (začetnega) navora. Zakaj, ko je glavno navitje motorja priključeno na omrežje z eno fazo, se njegov rotor ne more vrteti.
Za zagotovitev zagona enofaznega motorja je na statorju nameščen še en navitje - zagonsko navitje. Nahaja se pod kotom 90 ° glede na glavno navitje in je zaporedno povezan s kondenzatorjem ali induktorjem. V trenutku, ko sta začetna in glavna navitja povezana z omrežjem, magnetni tokovi, ki jih ustvarjajo, ustvarjajo vrtljivo magnetno polje. Zaradi tega se pojavi v rotorju inducirani tok. Zaradi interakcije rotacijskega magnetnega polja, ki ga ustvarjajo tokovi v statorskih navitjih in magnetno polje, ki ga ustvari indukcijski tok v rotorju, se rotor začne vrteti.
Medtem ko se rotor vrti, nastane zdrs, zato zagonsko navitje v tem primeru preprosto ni potrebno in se izklopi z inercijskim (centrifugalnim) stikalom ali posebnim relejem. Trifazni asinhroni motor se lahko uporablja tudi kot enofazni motor. Toda pomanjkljivost te metode je potreba po uporabi dragih velikih kondenzatorjev, saj je za vsakih 100 W moči potreben kondenzator s kapaciteto približno 10 μF.
Asinhroni elektromotorji.
Trenutno asinhroni motorji predstavljajo vsaj 80 % vseh elektromotorjev, ki jih proizvaja industrija. Sem spadajo tudi trifazni asinhroni motorji.
Trifazni asinhroni elektromotorji se pogosto uporabljajo v avtomatskih in telemehanskih napravah, gospodinjskih in medicinskih napravah, napravah za snemanje zvoka itd.
Asinhroni stroj je električni stroj z izmeničnim tokom, katerega hitrost rotorja ni enaka (v motornem načinu manj) frekvenci vrtenja magnetnega polja, ki ga ustvarja tok navitja statorja.
V številnih državah se komutatorski stroji uvrščajo tudi med asinhrone stroje. V Rusiji so se stroji, ki so indukcijski, začeli imenovati asinhroni stroji.
Asinhroni stroji danes predstavljajo večino električnih strojev. Uporabljajo se predvsem kot elektromotorji in so glavni pretvorniki električne energije v mehansko.
Prednosti asinhronih elektromotorjev:
Široka razširjenost trifaznih asinhronih motorjev je razložena s preprostostjo njihove zasnove, zanesljivostjo delovanja, dobrimi zmogljivostmi, nizkimi stroški in enostavnostjo vzdrževanja.
Napake:
1. Majhen začetni navor.
2. Pomemben začetni tok.
Asinhroni stroj ima stator in rotor ločena z zračno režo. Njegovi aktivni deli so navitja in magnetno vezje; vsi drugi deli so strukturni, zagotavljajo potrebno trdnost, togost, hlajenje, vrtenje itd.
Navitje statorja je trifazno (na splošno večfazno) navitje, katerega vodniki so enakomerno razporejeni po obodu statorja in položeni v fazah v režah s kotno razdaljo 120 el. toča Faze navitja statorja so povezane v skladu z standardne sheme"trikotnik" ali "zvezda" in se priključite na omrežje s trifaznim tokom. Statorski magnetni tokokrog se v procesu spreminjanja (rotacije) magnetnega pretoka navitja magnetnega polja remagnetizira, zato je laminiran (ploščen) iz elektrotehničnega jekla, da se zagotovijo minimalne magnetne izgube.
Na podlagi zasnove rotorja so asinhroni stroji razdeljeni na dve glavni vrsti: s v kratkem stiku rotor in s faza rotor. Oba tipa imata enako zasnovo statorja in se razlikujeta le po zasnovi navitja rotorja. Rotorski magnetni tokokrog je izdelan podobno kot statorski magnetni tokokrog - iz elektrotehničnega jekla in laminiran.
Rotor z veverico. Rotor asinhronega stroja tipa veveričja kletka.
Kratkostično navitje rotorja, ki se zaradi zunanje podobnosti zasnove pogosto imenuje "veveričja kletka", je sestavljeno iz bakrenih ali aluminijastih palic, ki so na koncih kratko povezane z dvema obročema. Palice tega navitja so vstavljene v utore jedra rotorja. Pri strojih majhne in srednje moči je rotor običajno izdelan z vlivanjem staljene aluminijeve zlitine v utore jedra rotorja. Skupaj s palicami veveričjih kletk so uliti kratkostični obroči in končne lopatice, ki opravljajo samoprezračevanje samega rotorja in prezračevanje stroja kot celote. V strojih z veliko močjo je "veveričja kletka" izdelana iz bakrenih palic, katerih konci so zvarjeni v kratkostične obroče.
Pogosto so reže rotorja ali statorja narejene poševno, da se zmanjša višji harmonski EMF, ki ga povzročajo pulzacije magnetnega pretoka zaradi prisotnosti zob, katerih magnetni upor je bistveno nižji od magnetnega upora navitja, pa tudi za zmanjšanje hrup zaradi magnetnih razlogov. Za izboljšanje zagonskih lastnosti asinhronega elektromotorja z rotorjem s kletko, in sicer za povečanje zagonskega momenta in zmanjšanje zagonskega toka, se na rotorju uporablja posebna oblika utora. V tem primeru ima del utora rotorja, ki je zunaj vrtilne osi, manjši prerez kot notranji del. To vam omogoča, da uporabite učinek tokovnega premika, zaradi katerega se aktivni upor navitja rotorja poveča med velikimi zdrsi (med zagonom).
Asinhroni motorji z kletkasti rotor imajo majhen začetni navor in pomemben začetni tok, kar je pomembna pomanjkljivost "veveričje kletke". Zato se uporabljajo v tistih električnih pogonih, kjer niso potrebni veliki zagonski momenti. Prednosti so enostavna izdelava in odsotnost mehanskega stika s statičnim delom stroja, kar zagotavlja vzdržljivost in zmanjšuje stroške vzdrževanja. S posebno zasnovo rotorja, ko magnetno vezje "rotorja" miruje in se v magnetni reži vrti le votel aluminijast valj (veveričja kletka ali kratkostično navitje rotorja), je mogoče doseči nizko vztrajnost motorja.
Načrtovanje asinhronih elektromotorjev z navitim rotorjem.
Glavna dela katerega koli asinhronskega motorja sta stacionarni del - stator in vrtljivi del, imenovan rotor.
Stator trifaznega asinhronega motorja je sestavljen iz laminiranega magnetnega jedra, stisnjenega v lito ogrodje. Na notranji površini magnetnega jedra so utori za polaganje vodnikov za navijanje. Ti prevodniki so strani večobratnih mehkih tuljav, ki tvorijo tri faze navitja statorja. Geometrijske osi tuljav so med seboj premaknjene v prostoru za 120 stopinj.
Faze navitja so lahko povezane v zvezdni ali trikotni vzorec, odvisno od omrežne napetosti. Na primer, če so v podatkovnem listu motorja navedene napetosti 220/380 V, so pri omrežni napetosti 380 V faze povezane v zvezdo. Če je omrežna napetost 220 V, so navitja povezana v "trikotnik". V obeh primerih fazna napetost motor je 220 V.
Rotor trifaznega asinhronega motorja je valj, izdelan iz žigosanih pločevin električnega jekla in nameščen na gredi. Glede na vrsto navitja so rotorji trifaznih asinhronih motorjev razdeljeni na kletko in fazo.
Dolivo-Dobrovolsky je prvi izdelal motor z rotorjem s kletko in preučeval njegove lastnosti. Ugotovil je, da imajo takšni motorji zelo resno pomanjkljivost - omejen zagonski navor. Dolivo-Dobrovolsky je poimenoval razlog za to pomanjkljivost - močno kratkotrajen rotor. Predlagal je tudi zasnovo motorja z navitim rotorjem.
Na sl. prikazuje prečni prerez asinhronskega stroja z navitim rotorjem: 1 - okvir, 2 - navitje statorja, 3 - rotor, 4 - drsni obroči, 5 - ščetke.
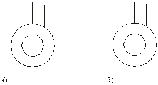
Navitje rotorja je trifazno, podobno kot navitje statorja, z enakim številom parov polov. Zavoji navitja so nameščeni v utore jedra rotorja in povezani v zvezdasti vzorec. Konci vsake faze so povezani z drsnimi obroči, pritrjenimi na gred rotorja, in so skozi ščetke izpeljani v zunanji tokokrog. Drsni obroči so izdelani iz medenine ali jekla in morajo biti izolirani drug od drugega in od gredi. Kot krtače se uporabljajo kovinsko-grafitne krtače, ki se pritisnejo na drsne obroče z vzmetmi držala krtač, ki so fiksno pritrjene v ohišju stroja. Na sl. Podan je simbol za asinhronski motor z kletkastim (a) in fazno navitim (b) rotorjem.

V močnejših asinhronih elektromotorjih in posebnih strojih z nizko močjo se fazno naviti rotorji uporabljajo za izboljšanje zagonskih in krmilnih lastnosti. V teh primerih je na rotor nameščeno trifazno navitje z geometrijskimi osmi faznih tuljav (1), ki so med seboj premaknjene v prostoru za 120 stopinj.
Faze navitja so povezane z zvezdo, njihovi konci pa so povezani s tremi drsnimi obroči (3), nameščenimi na gredi (2) in električno ločenimi tako od gredi kot med seboj. S pomočjo ščetk (4), ki so v drsnem stiku z obroči (3), je možno vključiti nastavitvene reostate (5) v tokokroge faznega navitja.
Asinhronski motor z navitim rotorjem ima boljše zagonske in krmilne lastnosti, vendar je zanj značilna večja teža, velikost in cena kot asinhronski motor z rotorjem s kletko.
Načelo delovanja asinhronih elektromotorjev.
Načelo delovanja asinhronega stroja temelji na uporabi vrtljivega magnetnega polja. Pri priključitvi trifaznega statorskega navitja na omrežje nastane vrtilno magnetno polje, katerega kotna hitrost je določena z omrežno frekvenco f in številom parov polov navitja p, tj. ω1=2πf/p
Prečkanje vodnikov navitij statorja in rotorja to polje inducira EMF v navitjih (po zakonu elektromagnetne indukcije). Ko je navitje rotorja zaprto, njegov EMF inducira tok v tokokrogu rotorja. Kot posledica interakcije toka z nastalim magnetnim poljem nastane elektromagnetni navor. Če ta moment preseže moment upora na gredi motorja, se začne gred vrteti in poganjati delovni mehanizem. Značilno je, da kotna hitrost rotorja ω2 ni enaka kotni hitrosti magnetnega polja ω1, ki se imenuje sinhrono. Zato je ime motorja asinhroni, tj. nesinhrono.
Za delovanje asinhronega stroja je značilen zdrs s, ki je relativna razlika kotne hitrosti polje ω1 in rotor ω2: s= (ω1-ω2) /ω1

Vrednost in znak zdrsa, odvisno od kotne hitrosti rotorja glede na magnetno polje, določata način delovanja asinhronega stroja. Tako se v idealnem stanju mirovanja rotor in magnetno polje vrtita z enako frekvenco v isto smer, zdrs s = 0, rotor miruje glede na vrteče se magnetno polje, EMF v njegovem navitju ni induciran, tok rotorja in elektromagnetni navor stroja enaka nič. Pri zagonu rotor v prvem trenutku miruje: ω2=0, s=1. Na splošno se zdrs v načinu motorja spreminja od s=1 ob zagonu do s=0 v idealnem načinu mirovanja.
Ko se rotor vrti s hitrostjo ω2>ω1 v smeri vrtenja magnetnega polja, postane zdrs negativen. Stroj preide v način generatorja in razvije zavorni moment. Ko se rotor vrti v smeri, ki je nasprotna smeri vrtenja magnetnega polja (s>1), preide asinhronski stroj v nasprotno stikalo in prav tako razvije zavorni moment. Tako glede na zdrs ločimo motorni (s=1÷0), generatorski (s=0÷-∞) način in protistikalni način (s=1÷+∞). Generatorski in povratni načini se uporabljajo za zaviranje asinhronih motorjev.
Drsni rotor.
Fazni rotor ima trifazno (na splošno večfazno) navitje, običajno povezano v zvezdni konfiguraciji in povezano z drsnimi obroči, ki se vrtijo z gredjo stroja. Uporaba kovinsko-grafitnih ščetk, ki drsijo vzdolž teh obročev v vezje navitja rotorja:
vključiti balastni reostat, ki deluje kot dodatni aktivni upor, enak za vsako fazo. Z zmanjšanjem zagonskega toka dosežejo povečanje zagonskega momenta na največjo vrednost (v prvem trenutku). Takšni motorji se uporabljajo za pogon mehanizmov, ki delujejo pod velikimi obremenitvami ali zahtevajo nemoten nadzor hitrosti.
vključite induktivnosti (dušilke) v vsako fazo rotorja. Upornost dušilk je odvisna od frekvence tekočega toka in, kot je znano, je v rotorju v prvem trenutku zagona frekvenca drsnih tokov največja. Ko se rotor vrti, se frekvenca induciranih tokov zmanjša, s tem pa se zmanjša tudi upor induktorja. Induktivna reaktanca v tokokrogu navitega rotorja vam omogoča avtomatizacijo postopka zagona motorja in po potrebi "pobere" motor, katerega hitrost je padla zaradi preobremenitve. Induktivnost ohranja tokove rotorja na konstantni ravni.
vključi vir DC, s čimer dobimo sinhroni stroj.
vključite moč iz inverterja, ki vam omogoča nadzor hitrosti in navora motorja. To je poseben način delovanja (stroj z dvojno močjo). Možno je vklopiti omrežno napetost brez razsmernika, s faznim razporejanjem, nasprotnim tistemu, s katerim se napaja stator.
Zagon asinhronega motorja z navitim rotorjem.
Zagonske pogoje asinhronskega motorja z rotorjem s faznim navitjem je mogoče bistveno izboljšati za ceno nekaterih zapletov pri načrtovanju in vzdrževanju motorja.
Ker Ker je aktivni upor faznega navitja rotorja razmeroma majhen, je za pridobitev največjega začetnega zagonskega navora potrebno vključiti začetni reostat s faznim uporom v vezju rotorja
Takoj, ko se rotor začne vrteti, se zdrs zmanjša, skupaj z njim pa EMF in tok rotorja, zaradi česar se navor zmanjša. Da bi motor še naprej razvijal navor blizu maksimuma, je treba upor zagonskega reostata postopoma zmanjšati. Končno, ko motor doseže nazivno število vrtljajev, pride do kratkega stika zagonskega reostata.
Za zmanjšanje mehanskih izgub in obrabe obročev in ščetk so motorji včasih opremljeni z napravo za dviganje ščetk in kratek stik obročev.
Večji kot mora biti začetni navor, bližje kot je največjemu navoru, večji bo začetni tok. Zato je le za posebej težke pogoje zagona reostat izbran tako, da je začetni navor enak največjemu.
Da se zagotovi, da se začetni reostat med zagonom ne pregreje, mora biti njegova moč približno enaka moči motorja. Za motorje z veliko močjo so zagonski reostati izdelani z oljnim hlajenjem.
Seveda uporaba zagonskega reostata bistveno izboljša zagonske pogoje asinhronskega motorja, poveča začetni navor in zmanjša začetni tok.
Metode krmiljenja asinhronskega motorja.
Poganja ga asinhroni motor AC se nanaša na spremembo hitrosti rotorja in/ali njegovega navora. Obstajajo naslednji načini za krmiljenje asinhronega motorja:
reostat - spreminjanje hitrosti vrtenja IM z navitim rotorjem s spreminjanjem upora reostata v tokokrogu rotorja, poleg tega pa to poveča začetni navor;
frekvenca - spreminjanje frekvence vrtenja IM s spreminjanjem frekvence toka v napajalnem omrežju, kar povzroči spremembo frekvence vrtenja statorskega polja. Motor se vklopi preko frekvenčnega pretvornika
preklop navitij iz vezja “zvezda” v vezje “trikot” med postopkom zagona motorja, kar zmanjša zagonske tokove v navitjih za približno trikrat, hkrati pa se zmanjša tudi navor;
impulzno - z dovajanjem posebne vrste napajalne napetosti (na primer žaga);
uvedba dodatnih e. d. z v skladu s frekvenco zdrsa ali v nasprotni smeri sekundarno vezje.
spreminjanje števila parov polov, če je takšno preklapljanje konstrukcijsko predvideno (samo pri kratkostičnih rotorjih);
spreminjanje amplitude napajalne napetosti, ko se spremeni samo amplituda (ali efektivna vrednost) krmilne napetosti. Nato vektorji krmilne in vzbujalne napetosti ostanejo pravokotni (zagon avtotransformatorja);
za fazno krmiljenje je značilno, da se sprememba vrtilne frekvence rotorja doseže s spreminjanjem faznega zamika med vektorjem vzbujalne in krmilne napetosti;
amplitudno-fazna metoda vključuje opisani metodi;
vključitev v napajalni krog statorja reaktorja;
induktivna reaktanca za motor z navitim rotorjem.
Reostatska regulacija.
Pri trifaznih asinhronih motorjih z navitim rotorjem se za regulacijo hitrosti rotorja uporablja metoda reostata. To dosežemo z uvedbo nastavljivega trifaznega reostata v tokokrog faznih navitij rotorja, kot pri zagonu motorja. Toda ta reostat mora biti zasnovan za dolgotrajna obremenitev tok rotorja in ne kratkoročno, kot je začetni reostat. Povečanje aktivnega upora vezja rotorja spremeni karakteristiko M BP (s) - naredi mehkejšo. Če se pri konstantnem navoru na gredi motorja aktivni upor vezja rotorja poveča s postopnim povečevanjem upora reostata ( r str 1 < r str 2 < r str 3 ), potem bo imela delovna točka eno krivuljo M BP (s) do naslednjega, kar ustreza povečanemu uporu vezja rotorja, zato se zdrs poveča in posledično zmanjša število vrtljajev motorja. Na ta način lahko spreminjate hitrost rotorja v območju od nominalne do popolne zaustavitve. Slabost tega načina regulacije so razmeroma velike izgube energije.
Osnovne okvare asinhronskega motorja z navitim rotorjem
|
Okvara |
Možen razlog |
|
Ne razvije nazivne hitrosti vrtenja in brni |
Enostransko vlečenje rotorja zaradi: a) obrabe ležajev; b) neusklajenost ležajnih ščitov; c) upogibanje gredi |
|
Slabo razvije hitrost in brni, tok v vseh treh fazah je različen in enakomeren prosti tek presega nominalno |
1. Navitja so nepravilno povezana in ena od faz je "obrnjena na glavo" 2. Palica navitja rotorja je strgana |
|
Rotor se ne vrti ali se vrti počasi, motor brni |
Faza navitja statorja je prekinjena |
|
Cel avto vibrira |
1. Centriranje polovic sklopke ali poravnava gredi je moteno 2. Rotor, jermenica in polovice sklopke so neuravnotežene |
|
Vibracije izginejo po odklopu iz omrežja, tok v fazah statorja postane neenakomeren, eden od delov statorskega navitja se hitro segreje |
Kratek stik v navitju statorja |
|
Pregreva se pri nazivnih preobremenitvah |
1. Vklopite kratek stik v navitju statorja 2. Kontaminacija navitij ali prezračevalnih kanalov |
|
Nizka odpornost |
1. Vlaga ali onesnaženje navitij 2. Staranje izolacije |
Zaključek
Trifazni asinhroni elektromotorji z rotorjem s kletko se pogosto uporabljajo v nacionalno gospodarstvo, vendar imajo takšni motorji številne pomanjkljivosti: ni gladkega nadzora hitrosti, visokega zagonskega toka itd. Toda vse to je mogoče zaobiti, če namesto rotorja uporabite navit rotor.
Fazni rotor je pravilno nameščen: trifazno navitje je nameščeno v reže rotorja (navitje je podobno navitju statorja); faze navitja rotorja so povezane z zvezdo; začetki faz so povezani s tremi kontaktnimi obroči iz medenine ali bakra, ki so nato nameščeni na isti gredi z rotorjem. V skladu s tem so drsni obroči izolirani drug od drugega in od gredi. Kovinsko-grafitne ali ogljikove ščetke, nameščene na držalu ščetke, nameščenem na ležajnem ščitu, so dobro pritisnjene na kontaktne obroče.
Za zagon motorja z navitim rotorjem so krtače priključene na krmilne ali zagonske reostate. Ti isti reostati omogočajo zmanjšanje zagonskega toka, saj se zaradi njih skupni upor navitja rotorja poveča.
Reostati se uporabljajo za gladko krmiljenje vrtljajev motorja, pa tudi za spreminjanje drugih delovnih karakteristik.
Reference
1. Oblikovanje električnih strojev: Učbenik za univerze, knjiga 1. Uredil Kopylov I.P. Moskva: Energoatomizdat 1993. - 464 str.
2. Električni stroji: Asinhroni stroji: Učbenik. Za elektromeh. specialist. Univerze / Radin V.I., Bruskin D.E., Zorohovich A.E.; Ed. I.P. Kopylov-M .: Višja šola, 1988, -328 str.
Kuznecov M.I. Osnove elektrotehnike. Študijski vodnik. Ed. 10., popravljeno "Podiplomska šola"
Asinhroni motor s kletkastim rotorjem (AM S KZR)
Naprave, ki pretvarjajo električno energijo (vhod) v mehansko energijo (izhod), se imenujejo električni motorji .
Mehanska energija je potrebna za delovanje proizvodnih strojev in mehanizmov.
krvni tlak sestoji iz sestavljen iz statorja (fiksni del) in rotorja (gibljivi del).
Stator vključuje: ohišje; magnetno vezje (jedro), sestavljeno iz tankih jeklenih plošč; tri navitja (tuljave), med seboj zamaknjena za 120°, ki se prilegajo utorom magnetnega jedra.
Rotor vključuje: gred, magnetno vezje, kratkostično (v obliki kletke) navitje.
Simbol
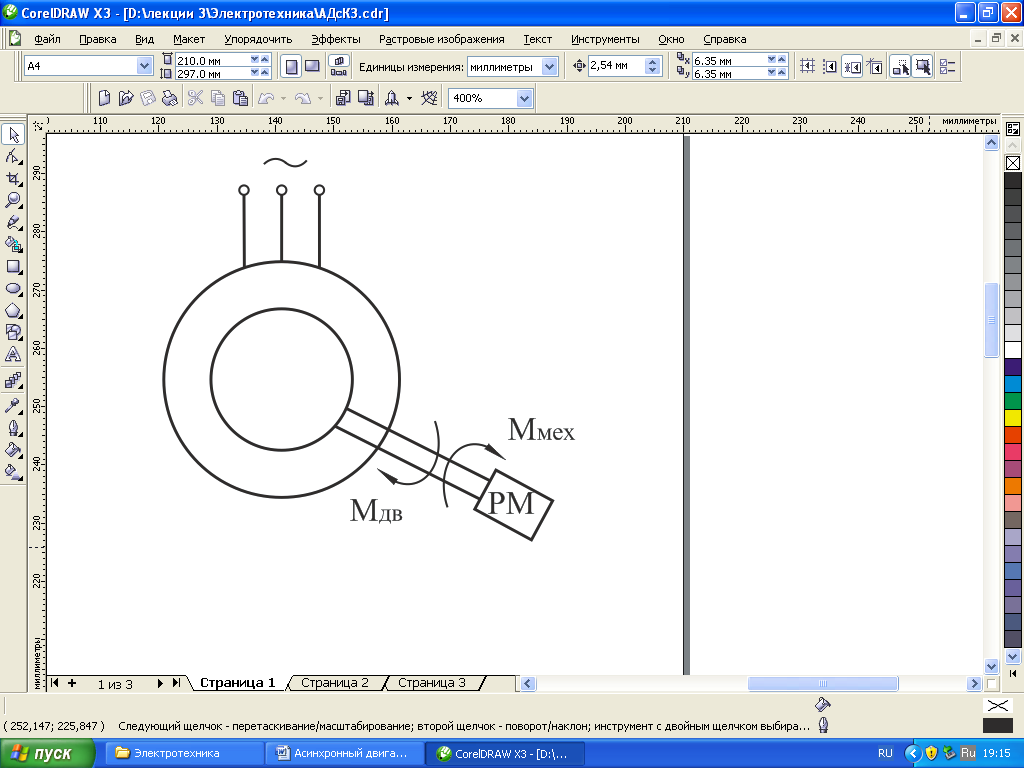
Na rotor je povezan proizvodni mehanizem, ki deluje kot obremenitev motorja.
Prednosti motorja: preprosto, poceni, zanesljivo.
Napake: slabe zagonske lastnosti, to je nizek zagonski moment, visok zagonski tok, kot tudi poraba jalovega toka iz omrežja.
PRINCIP DELOVANJA
U 1 → jaz 1 → F 1 (vrtljivo magnetno polje)→ E 2 (E 1 ) → jaz 2
Kot rezultat interakcije I 2 s F nastane moment M [Nm].
M = TOjaz 2 F cosψ 2,
kjer je ψ 2 fazni premik med E 2 in I 2, pod vplivom katerega se rotor začne vrteti.
V IM obstaja ASINHRONOST (neenakomernost) vrtenja magnetnega polja n 1 in rotorja n 2. Zaradi tega asinhronega gibanja se v rotorju pojavljajo električni procesi (E 2 in I 2). Količina asinhronosti je ocenjena z drsenjem S v relativnih enotah ali odstotkih:
![]() ,
[%],
,
[%],
n 1 - frekvenca vrtenja magnetnega polja.
P p - število parov magnetni poli polja: 1, 2, 3 ... itd.;
f je trenutna frekvenca.
Če je f nom = 50 Hz, potem = 3000, 1500, 1000 vrt/min itd., odvisno od števila parov polov motorja.
Iz (1) imamo ![]() .
.
Delovanje motorja se začne od n 2 = 0 (zagon), nato
(največji zdrs).
Teoretično je največja hitrost rotorja, ko ni obremenitve n 2 = n 1, torej
Razpon sprememb S je bil od 1 (najmanjša hitrost rotorja) do 0 (največja hitrost rotorja).
MEHANSKE ZNAČILNOSTI PEKLA - glavna značilnost IM, ki prikazuje, kako se hitrost rotorja spreminja pod vplivom obremenitve. To značilnost je mogoče dobiti operativno ali z izračunom po formulah:
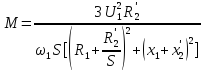 (1)
(1)
Če navedete S v formulah (1) in (2), lahko najdete n.
Z določitvijo obremenitve M lahko najdete zdrs in posledično n 2.
Ta mehanska značilnost ima obliko:
|
|
|

V značilnostih lahko izpostavimo 4 glavne točke in temu primerno 3 parcele. Upoštevajte te točke:
1 - prosti tek (motor se vrti brez obremenitve).
Koordinate te točke (n 2 = n 1, M=0);
2 - nominalni način - se pojavi pri obremenitvi, ki je enaka največji dovoljeni v dolgotrajnih pogojih delovanja.
Koordinate te točke (n 2 = n nom, M = M nom) so navedene v potnem listu;
3 - kritična obremenitev, pri kateri motor razvije največji navor.
Koordinate te točke (S cr ali n cr; M = M max = M cr).
Ko je obremenitev večja od kritične, se motor ne more spopasti z njo, kar vodi do ustavitve;
4 - začetne točke, od te točke se motor zažene.
Koordinate te točke (n 2 = 0, M = M n)
Vse koordinate je mogoče najti iz podatkov potnega lista motorja.
Spletna mesta 1-3 - stabilno delovanje, pri obremenitvi motorja od 0 do Mcr ima motor sposobnost prilagajanja obremenitvi in povečanja navora (sile), kar ne vodi do zaustavitve motorja.
3-4 - označuje, da je delovanje motorja na tem območju nestabilno;
V tem primeru:
1-2 - možno je dolgotrajno delovanje, pri katerem porabljeni tok iz omrežja ne presega največje dovoljene, tj.
2-3 - dopustno je le kratkotrajno delovanje, ker je pri takih obremenitvah I motorja > I nom možno pregrevanje motorja.
MEHANSKE ZNAČILNOSTI n=f(M), dobljeno pri nazivnih delovnih pogojih, tj. pri U=U nom, f=f nom in naravni vzorec vključkov (brez dodatnih elementov) imenujemo NARAVNO.
UREJANJE HITROSTI BP S KZR
Kot izhaja iz formule
![]()
na frekvenco vrtenja lahko vplivamo s spreminjanjem frekvence vrtenja magnetnega polja
S spreminjanjem frekvence napajalne napetosti f 1 (z uporabo posebnih pretvornikov) ali spreminjanjem števila parov polov P p (spreminjanje vezja statorskih tuljav).
V obeh primerih ostane količina zdrsa skoraj nespremenjena.
Prav tako lahko spreminjamo vrtilno frekvenco motorja z vplivanjem na zdrs S. To lahko naredimo s spremembo napetosti, ki napaja motor, ali s spremembo upora rotorja (če konstrukcija rotorja to omogoča).
MEHANSKE ZNAČILNOSTI, dobljeno pri obratovalnih pogojih, ki se razlikujejo od nominalnih, se imenuje UMETNO.
Razmislimo o teh metodah.
VPLIV FREKVENCEfPRI HITROSTI MOTORJA
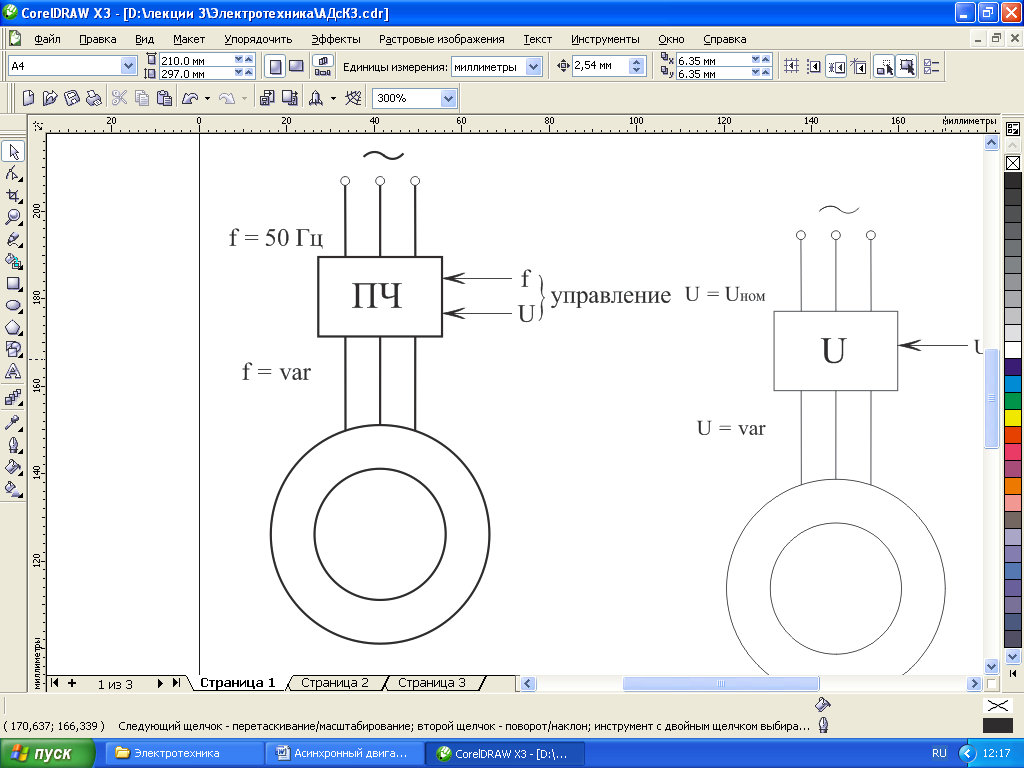
Iz strojne teorije je znano, da je za zagotovitev učinkovitega delovanja motorja s frekvenčno regulacijo potrebno spreminjati napajano napetost s spremembo f tako, da ostane razmerje U/f konstantno. Očitno je ta pogoj mogoče izpolniti le z zmanjšanjem f<50 Гц, потому что уменьшение напряжения U
Pri povečanju f>50 Hz je treba napetost U>U nom sorazmerno povečati, vendar to zaradi pogojev delovanja motorja ni dopustno. Ta okoliščina se bo odražala v obliki mehanskih lastnosti.
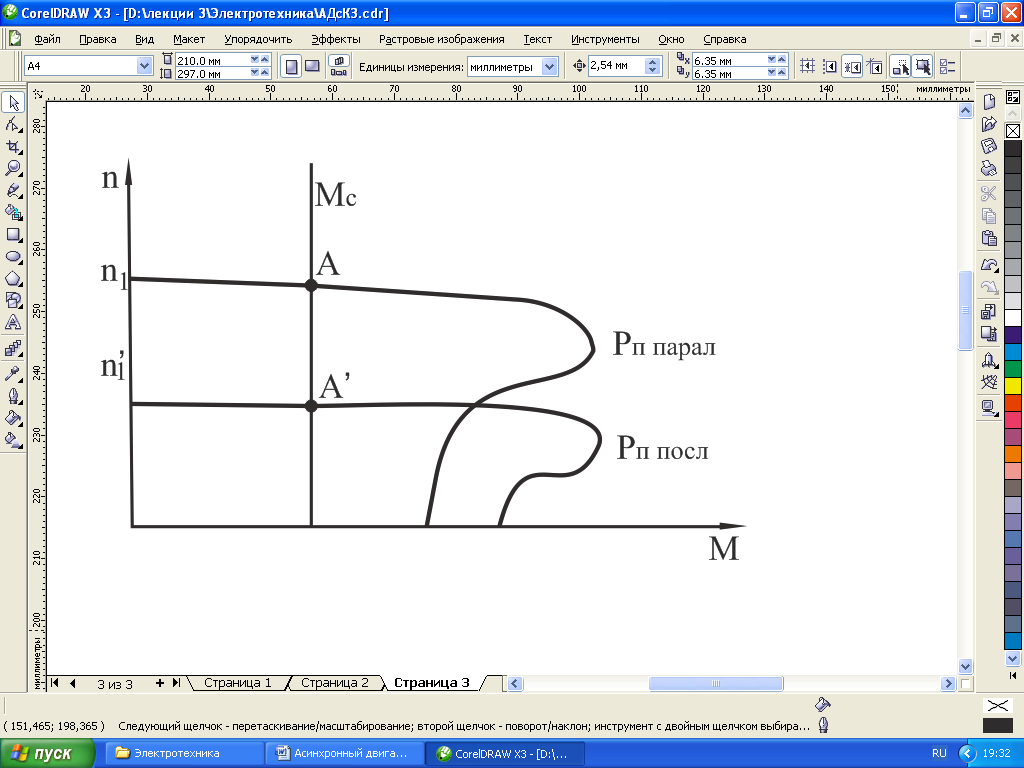
Upoštevajte, da se bo v vsakem primeru, ko se spremeni f, spremenila tudi frekvenca vrtenja magnetnega polja (t.j. položaj točke n 1 na mehanski karakteristiki). Tako je položaj točke n 1 lahko vodilo pri prikazovanju umetnih mehanskih karakteristik.

Če podamo mehansko karakteristiko mehanske karakteristike mehanizma (naj M c = const, kjer je M c moment upora), potem lahko ocenimo območje krmiljenja hitrosti za frekvenčno krmiljenje, kjer A, A", A" so delovne točke, dobljene pod pogojem M dv = M s.
Prednosti frekvenčne metode uravnavanja krvnega tlaka hitrost: gladkost regulacije: z gladkim spreminjanjem f dobimo veliko število umetne lastnosti in posledično hitrosti; velik razpon z nastavitvijo navzgor in navzdol od nazivne (dvopodročna regulacija).
Napake: potreba po vgradnji frekvenčnega pretvornika, kar bistveno poveča stroške električnega pogona.
POLE NADZOR predvideva možnost spreminjanja števila parov polov P p. Ta metoda je možna le pri posebnih - večhitrostnih, asinhronih motorjih in se doseže s preklopom posameznih odsekov, ki sestavljajo statorsko tuljavo (navitje), iz serijske povezave. na vzporedno ali obratno, število parov polov pri serijski vezavi pa je 2-krat večje kot pri vzporedni povezavi, tj. P p zaporedno. =2P p vzporedno. , in zato ![]() .
.
Očitno se bo položaj točke n 1 na mehanski karakteristiki spremenil za 2-krat.
Prednosti krmiljenja drogov: enostavnost izvedbe, odsotnost posebnih pretvornih naprav v napajalnem krogu motorja.
Napake: stopenjska regulacija, majhno območje regulacije.
NADZOR HITROSTI S SPREMINJANJEM NAPAJALNE NAPETOSTIU
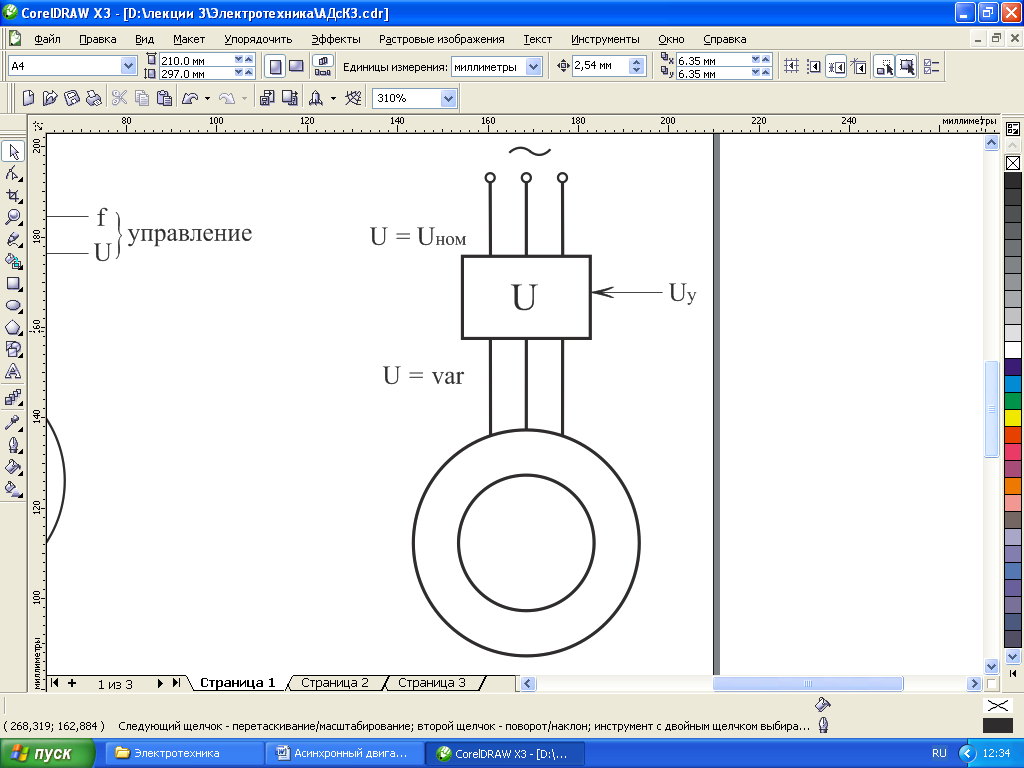
Pri tej metodi frekvenca vrtenja magnetnega polja () ostane konstantna, frekvenca vrtenja rotorja pa se spreminja zaradi drsenja. To je mogoče pojasniti z dejstvom, da se z zmanjšanjem napajalne napetosti M motorja močno zmanjša (kvadratna odvisnost), kar pri enaki obremenitvi povzroči zmanjšanje hitrosti in posledično zdrs. Pri konstruiranju umetnih mehanskih značilnosti izhajamo iz dejstva, da se točka n 1, ki ustreza frekvenci vrtenja magnetnega polja, ne bo spremenila, napetost U se lahko spremeni le proti zmanjšanju in posledično trenutki M p in M max se bo zmanjšal, saj je M~ U2.
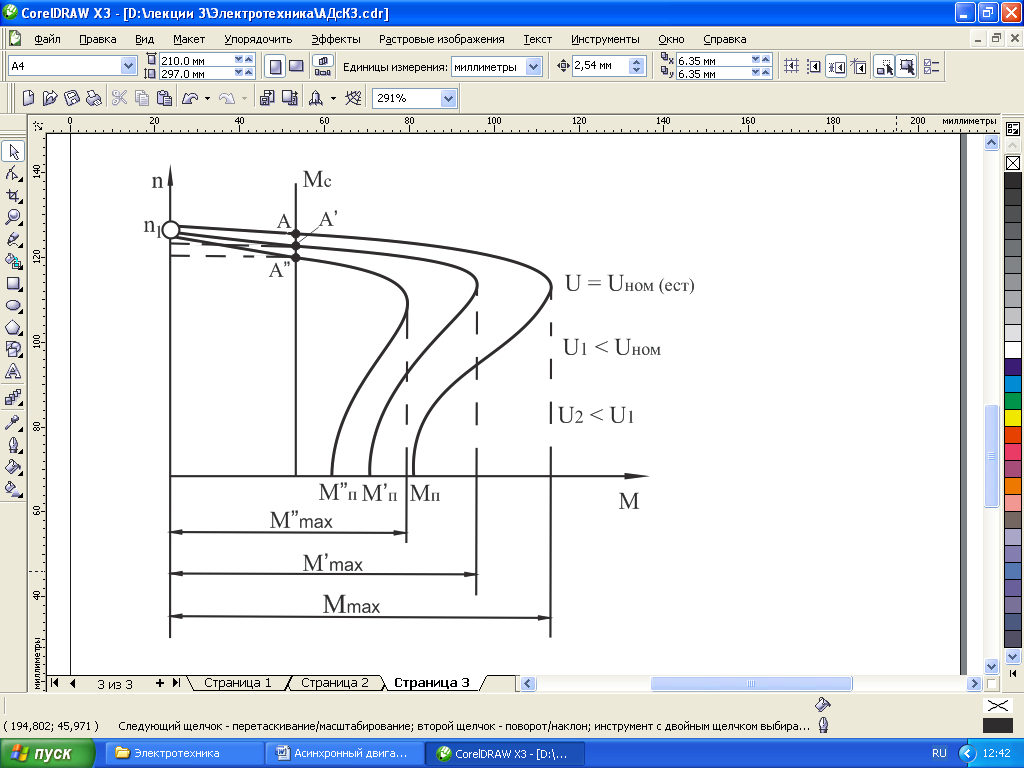
Napaka: majhno območje regulacije hitrosti (ocene hitrosti pri delu na točkah A, A, A"). zato ta metoda regulacija se redko uporablja.
Predavanja na električni stroji
Asinhroni motor z rotorjem s kletko (sl. 249 in 250) je sestavljen iz naslednjih glavnih delov: stator s trifaznim navitjem, rotor s kletko in okostje. Navitje rotorja je izdelan brezkontaktno (ni povezan z nobenim zunanjim tokokrogom), kar določa visoka zanesljivost tak motor.
Magnetni sistem.Asinhroni stroj Za razliko od enosmernega stroja nima izrazitih polov. Takšen magnetni sistem imenujemo neizrazit pol.Število polov v stroju je določeno s številom tuljav v navitju statorja in njihovim povezovalnim diagramom. V štiripolnem stroju (sl. 251) je magnetni sistem sestavljen iz štirih enakih vej, vzdolž katerih poteka polovica magnetnega pretoka Ф p enega pola; v dvopolnem stroju sta dve taki veji, v šestpolni stroj - šest itd. Ker vsi elementi magnetnega sistema prehajajo skozi izmenični magnetni tok, potem ne le rotor 1, ampak
riž. 249. Asinhroni motor z rotorjem s kletko: 1 - okvir; 2 - stator; 3 - rotor; 4 - palice za navijanje rotorja; 5 - ležajni ščit; 6 - lopatice prezračevalnega rotorja; 7 - ventilator; 8 - priključna omarica
 riž. 250. Električni diagram asinhronski motor s kletkastim rotorjem (a) in njegov pogojni grafična podoba(b): 1 - stator; 2 - rotor
riž. 250. Električni diagram asinhronski motor s kletkastim rotorjem (a) in njegov pogojni grafična podoba(b): 1 - stator; 2 - rotor
 Sl.251. Magnetno polje štiripolnega asinhronskega stroja
Sl.251. Magnetno polje štiripolnega asinhronskega stroja
 riž. 252. Listi rotorja (a) in statorja (b)
riž. 252. Listi rotorja (a) in statorja (b)
 riž. 253. Paket sestavljenega statorja (a) in statorja z navitjem (b)
riž. 253. Paket sestavljenega statorja (a) in statorja z navitjem (b)
in stator 2 je izdelan iz pločevine električnega jekla (slika 252), ki je med seboj izolirana z izolacijskim lakirnim filmom, lestvico itd. škodljiv učinek vrtinčni tokovi, ki nastanejo v jeklu statorja in rotorja med vrtenjem magnetnega polja. Statorske in rotorske pločevine imajo odprto, polzaprto oz zaprta oblika, v katerem se nahajajo vodniki ustreznih navitij. V statorju se najpogosteje uporabljajo polzaprte reže pravokotne ali ovalne oblike, v strojih z visoko močjo - odprte reže pravokotne oblike.
Jedro statorja 1 (slika 253, a) je vtisnjeno v lito ogrodje 3 in pritrjeno z zaklepnimi vijaki. Jedro rotorja je pritisnjeno na gred rotorja, ki se vrti v krogličnih ležajih, nameščenih v dveh ležajnih ščitih. Zračna reža med statorjem in rotorjem ima najmanjša velikost, sprejemljivo z vidika natančnosti montaže in mehanske togosti konstrukcije. Pri motorjih majhne in srednje moči je zračna reža običajno nekaj desetink milimetra. Ta reža zagotavlja zmanjšanje magnetnega upora magnetnega vezja stroja in s tem zmanjšanje magnetizacijskega toka, potrebnega za ustvarjanje magnetnega toka v motorju. Zmanjšanje toka magnetiziranja vam omogoča povečanje faktorja moči motorja.
Navitje statorja. Izdelan je v obliki niza tuljav okroglih oz pravokotni odsek. Prevodniki, ki se nahajajo v utorih, so povezani tako, da tvorijo vrsto tuljav 2 (slika 253,b). Tuljave so razdeljene v enake skupine glede na število faz, ki so nameščene simetrično vzdolž oboda statorja (slika 254, a) ali rotorja. V vsaki takšni skupini so vse tuljave električno povezane in tvorijo eno fazo navitja, t.j. električni tokokrog. pri velike vrednosti fazni tok ali, če je treba preklopiti posamezne tuljave, imajo lahko faze več vzporednih vej. Najenostavnejši element navitja je zavoj (slika 254, b), sestavljen iz dveh vodnikov 1 in 2, nameščenih v utorih, ki se nahajajo na razdalji drug od drugega -
 riž. 254. Lokacija tuljav trifazno navitje na statorju asinhronega motorja (a) in obrat dveh vodnikov (b)
riž. 254. Lokacija tuljav trifazno navitje na statorju asinhronega motorja (a) in obrat dveh vodnikov (b)
u. Ta razdalja je približno enaka enemu polnemu razdelku m, kar razumemo kot dolžino loka, ki ustreza enemu polu.
Običajno so zavoji, ki jih tvorijo vodniki, ki ležijo v istih režah, združeni v eno ali dve tuljavi. Včasih se imenujejo odseki. Položeni so tako, da vsak utor sprejme eno stran tuljave ali dve strani - eno nad drugo. V skladu s tem ločimo enoslojna in dvoslojna navitja. Glavni parameter, ki določa porazdelitev navitja med režami, je število rež q na pol in fazo.
V navitju statorja dvopolnega motorja (glej sliko 254, a) je vsaka faza (A-X; B-Y; C-Z) sestavljena iz treh tuljav, katerih stranice so nameščene v treh sosednjih režah, tj. q = 3. Običajno q > 1 , se tako navitje imenuje razdeljen.
Najbolj razširjena so dvoslojna porazdeljena navitja. Njihovi deli 1 (slika 255, a) so nameščeni v reže 2 statorja v dveh slojih. Prevodniki statorskega navitja so ojačani v utorih s tekstolitnimi klini 5 (slika 255, b), ki so nameščeni na glavah zob.
Stene utora so prekrite s pločevinastim izolacijskim materialom 4 (elektrokarton, lakirana tkanina itd.). Vodniki, ki ležijo v utorih, so med seboj ustrezno povezani s končnih strani stroja. Žice, ki jih povezujejo, se imenujejo čelni deli. Ker čelni deli ne sodelujejo pri sprožanju e. itd., izvajajo se čim krajše.
Posamezne tuljave statorskega navitja so lahko povezane v zvezdo ali trikot. Začetki in konci navitij vsake faze so izpeljani na šest motornih sponk.
Navitje rotorja. Navitje rotorja je izdelano v obliki kletke (slika 256, a). Izdelan je iz bakrenih ali aluminijastih palic, ki so na koncih kratko povezane z dvema obročema (slika 256, b). Palice tega navitja so vstavljene v reže rotorja brez kakršne koli izolacije, saj je napetost v kratkostičnem navitju rotorja enaka nič.
 riž. 255. Dvoslojno navitje statorja asinhronega motorja: 1 - odsek; 2 - utor; 3 - vodnik; 4 - izolacijski material; 5 - klin; 6 - zob
riž. 255. Dvoslojno navitje statorja asinhronega motorja: 1 - odsek; 2 - utor; 3 - vodnik; 4 - izolacijski material; 5 - klin; 6 - zob
 riž. 256. Rotor z veverico: a - kletka z veverico; b - rotor z veveričjo kletko palic; c - rotor z lito kletko; 1 - kratkostični obroči; 2- palice; 3- gred; 4 - jedro rotorja; 5 - prezračevalne lopatice; 6 - lite kletke
riž. 256. Rotor z veverico: a - kletka z veverico; b - rotor z veveričjo kletko palic; c - rotor z lito kletko; 1 - kratkostični obroči; 2- palice; 3- gred; 4 - jedro rotorja; 5 - prezračevalne lopatice; 6 - lite kletke
Žlebovi rotorja z veverico so običajno polzaprti, pri strojih z nizko močjo pa zaprti (utor ima jekleni rob, ki ga ločuje od zračne reže). Ta oblika utora omogoča dobro ojačitev vodnikov navitja rotorja, čeprav nekoliko poveča njegovo induktivno upornost.
V motorjih z močjo do 100 kW se palice s kletko običajno dobijo z vlivanjem staljenega aluminija v utore jedra rotorja (slika 256, c). Skupaj s palicami veveričje kletke so uliti tudi končni kratkostični obroči, ki jih povezujejo.
Aluminij je primeren za ta namen, saj ima nizko gostoto, precej visoko električno prevodnost in se zlahka tali.
Običajno imajo motorji ventilatorje nameščene na gredi rotorja. Izvajajo prisilno prezračevanje ogrevani deli stroja (navitja in jeklo statorja in rotorja), kar omogoča večjo moč motorja. Pri motorjih z rotorjem veveričjih kletk so lopatice ventilatorja pogosto ulite skupaj s stranskimi obroči veveričjih kletk (glej sliko 256, c).
Asinhroni motorji z rotorjem s kletko so enostavni in zanesljivi pri delovanju. Veliko jih uporabljajo za pogon strojev za obdelavo kovin in drugih naprav, ki začnejo delovati brez obremenitve. Vendar pa razmeroma nizek začetni navor teh motorjev in velik zagonski tok ne omogočata, da bi jih uporabljali za pogon takšnih strojev in mehanizmov, ki jih je treba takoj zagnati pod veliko obremenitvijo (z velikim začetni navor). Takšni stroji vključujejo dvižne naprave, kompresorje itd.
Začetni navor lahko povečate in zmanjšate začetni tok tako, da izvedete veveričjo kletko s povečanim aktivnim uporom. V tem primeru bo imel motor povečan zdrs in velike izgube moči v navitju rotorja. Takšni motorji se imenujejo motorji s povečanim zdrsom (oznaka AC). Uporabljajo se lahko za pogon strojev, ki delujejo relativno kratek čas. Na e. p.s. Ti motorji na izmenični tok (z zdrsom do 10 %) se uporabljajo za pogon kompresorjev, ki delujejo občasno za kratek čas, ko se tlak v rezervoarjih zraka zmanjša pod določeno mejo.
Motorji s povečanim zagonskim momentom. Asinhronski motorji s kletko in povečanim začetnim navorom imajo posebno zasnovo rotorja (oznaka AP). Ti vključujejo motorje z dvojno kletko in motorje z globokimi režami.
Rotor 3 (slika 257,a) motorja z dvojno kletko ima dva kratkostično povezana navitja. Zunanja kletka 1 je začetna kletka. Ima visoko aktivno in nizko reaktanco. Notranja kletka 2 je navitje glavnega rotorja; nasprotno, ima nepomembno aktivno in visoko reaktanco. V začetnem trenutku zagona tok teče predvsem skozi zunanjo kletko, kar ustvarja pomemben navor. Ko se hitrost vrtenja poveča, tok prehaja v notranjo kletko in na koncu zagonskega procesa stroj deluje kot običajno motor s kletko z eno (notranjo) celico. Premik toka v zunanjo celico v začetnem trenutku zagona je razložen z dejanjem, npr. d.s. samoindukcija, inducirana v vodnikih rotorja. Nižje kot je prevodnik v utoru, večji je magnetni pretok 6, ki ga pokriva, in večji je e. d.s. v njem se inducira samoindukcija (sl. 257, c), zato bo imel večji induktivni upor.
Izpodrivanje toka v zgornje vodnike rotorja ima močan učinek, ko rotor miruje, ko je frekvenca toka, induciranega v obeh celicah rotorja, visoka. V tem primeru sta induktivni upor obeh celic veliko večji od aktivnih in tok se porazdeli med njima v obratnem sorazmerju z njunima induktivnima uporoma, tj. prehaja predvsem skozi zunanjo celico z visokim aktivnim uporom.
Z večanjem hitrosti rotorja se bo frekvenca toka v njem zmanjšala (rotacijsko magnetno polje bo prečkalo vodnike rotorja z nižjo frekvenco), tok pa bo začel teči skozi obe celici v skladu z njunima aktivnima uporoma, tj. predvsem skozi notranjo celico.
Tako je postopek zagona motorja z dvojno kletko podoben postopku zagona asinhronega motorja z navitim rotorjem, ko se na začetku zagona v tokokrog navitja rotorja vnese dodatni aktivni upor (zagonski reostat). in z napredovanjem pospeševanja se ta upor odstrani. Na enak način v obravnavanem motorju tok na začetku zagona prehaja skozi zunanjo kletko z visokim aktivnim uporom, nato pa, ko pospešuje, postopoma prehaja v notranjo kletko z nizkim aktivnim uporom.
riž. 257. Zasnova rotorjev asinhronih motorjev s povečanim začetnim navorom: z dvojno kletko (a), z globokimi utori (b) in deli njihovih utorov (c in d)
Za povečanje aktivne upornosti zagonske kletke so njene palice izdelane iz manganove medenine ali brona. Palice delovne kletke so izdelane iz bakra, ki ima nizko upornost, njihova površina preseka pa je večja od površine izstrelitvene kletke. Zaradi tega se aktivni upor začetne celice poveča za 4-5 krat v primerjavi z delovno. Med palicama obeh celic je ozka reža 5, katere dimenzije določajo induktivnost delovne celice. Motor z dvema kletkama je 20-30% dražji od motorja s kletko običajne izvedbe. Za poenostavitev tehnologije izdelave rotorja so dvokletni motorji majhne in srednje moči izdelani s kletko iz litega aluminija.
Delovanje motorjev z globokimi režami (slika 257, b) temelji tudi na uporabi pojava tokovnega premika. V teh motorjih so kletkaste palice 4 izdelane v obliki ozkih bakrenih palic, nameščenih v globokih utorih rotorja 3 (višina utora je 10-12-krat večja od njegove širine). Spodnji sloji palic, ki se nahajajo dlje od površine rotorja, so precej pokriti veliko število Obstaja 6 magnetnih linij toka uhajanja od zgornjih (sl. 257, d), zato imajo večkrat večjo induktivnost. Na začetku zagona, zaradi povečane induktivne reaktanse spodnjih delov palic, tok teče predvsem skozi njih zgornji deli. V tem primeru se uporabi le majhen del preseka vsake palice, kar vodi do povečanja njegovega aktivnega upora in posledično do povečanja aktivnega upora celotnega navitja rotorja.
Ko se vrtilna frekvenca rotorja poveča, se premik toka v zgornje dele palic zmanjša (iz istega razloga kot pri motorju z dvojno kletko), po končanem zagonu pa se tok enakomerno porazdeli po njihovem križu. presečno območje.