Podľa množstva krútiaceho momentu asynchrónny motor Fázový posun medzi prúdom I 2 a e má veľký vplyv. d.s. rotor E 2S.
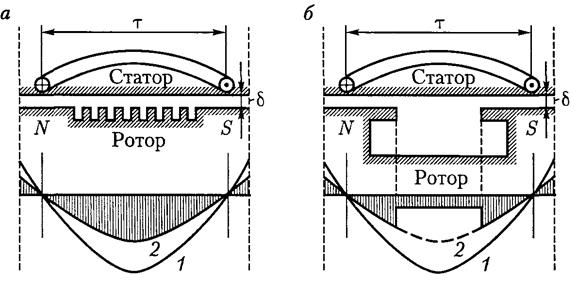
Uvažujme prípad, keď je indukčnosť vinutia rotora malá, a preto možno zanedbať fázový posun (obr. 223, a).
Rotujúce magnetické pole statora je tu nahradené poľom pólov N a S, ktoré sa otáčajú, predpokladajme, v smere hodinových ručičiek. Použitie pravidla pravá ruka, určiť smer e. d.s. a prúdy vo vinutí rotora. Rotorové prúdy, ktoré interagujú s rotujúcim magnetickým poľom, vytvárajú krútiaci moment. Smery síl pôsobiacich na vodiče s prúdom sú určené pravidlom ľavej ruky. Ako je zrejmé z výkresu, rotor sa pod vplyvom síl bude otáčať v rovnakom smere ako samotné rotačné pole, t.j. v smere hodinových ručičiek.
Uvažujme o druhom prípade, keď je indukčnosť vinutia rotora veľká. V tomto prípade je fázový posun medzi rotorovým prúdom I 2 a e. d.s. rotor E 2S bude tiež veľký. Na obr. 223, b, je magnetické pole statora asynchrónneho motora stále znázornené v tvare pólov N a S otáčajúcich sa v smere hodinových ručičiek Smer indukovaného napr. d.s. zostáva rovnaký ako na obr. 223, a, ale v dôsledku fázového oneskorenia prúdu, os magnetické pole Rotor sa už nebude zhodovať s neutrálnou siločiarou statora, ale posunie sa o určitý uhol proti rotácii magnetického poľa. To povedie k tomu, že spolu s vytvorením krútiaceho momentu nasmerovaného v jednom smere niektoré vodiče vytvoria opačný krútiaci moment.
Z toho je vidieť, že celkový krútiaci moment motora s fázovým posunom medzi prúdom a e. d.s. rotor je menší ako pre prípad, keď sú I 2 a E 2S vo fáze. Dá sa dokázať, že krútiaci moment asynchrónneho motora je určený iba aktívnou zložkou rotorového prúdu, t.j. prúdom I 2 cos a že ho možno vypočítať podľa vzorca:
Ф m - magnetický tok statora (a tiež približne rovnaký ako výsledný magnetický tok asynchrónneho motora);
Uhol fázového posunu medzi e. d.s. a fázový prúd vinutia
C je konštantný koeficient.
Po nahradení:
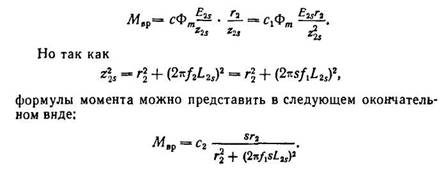
Z posledného výrazu je zrejmé, že krútiaci moment asynchrónneho motora závisí od sklzu.
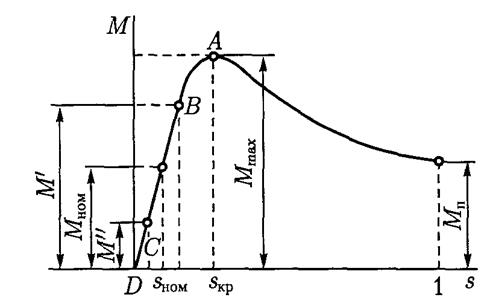
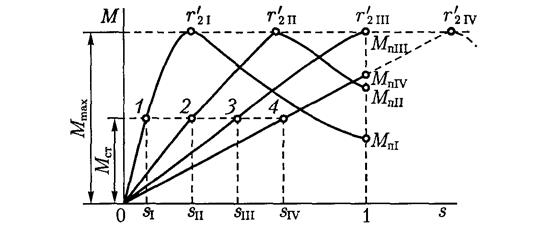
Na obr. 224 je znázornená krivka A závislosti krútiaceho momentu motora na sklze. Z krivky je vidieť, že v momente rozbehu, kedy s=l a n = 0, je krútiaci moment motora malý. Vysvetľuje to skutočnosť, že v okamihu spustenia je frekvencia prúdu vo vinutí rotora najvyššia a indukčná reaktancia vinutia je vysoká. Výsledkom je, že cos má malú hodnotu (o
|
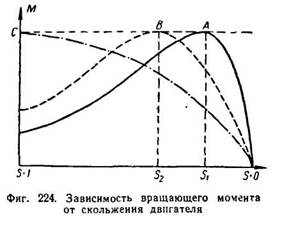
riadok 0,1-0,2). Preto aj napriek veľkým rozmerom štartovací prúd, počiatočný krútiaci moment bude malý.
Pri určitom sklze S 1 bude mať krútiaci moment motora maximálnu hodnotu. S ďalším znížením sklzu alebo inými slovami s ďalším zvýšením otáčok motora sa jeho krútiaci moment rýchlo zníži.
Pri posúvaní s = 0 bude rotačný moment motora tiež nulový.
Treba poznamenať, že asynchrónny motor prakticky nemôže mať nulový sklz. To je možné len vtedy, ak je rotor vybavený vonkajším krútiacim momentom v smere otáčania statorového poľa.
Rozbehový moment sa môže zvýšiť, ak sa v momente rozbehu zníži fázový posun medzi prúdom a e. d.s. rotor. Zo vzorca
Je zrejmé, že ak sa pri konštantnom indukčnom odpore vinutia rotora zvýši aktívny odpor, potom sa samotný uhol zníži, čo povedie k tomu, že krútiaci moment motora sa zvýši. To sa v praxi využíva na zvýšenie štartovacieho momentu motora. V momente štartovania sa do okruhu rotora zavedie aktívny odpor (štartovací reostat), ktorý sa potom odstráni, akonáhle motor zvýši otáčky.
Zvýšenie rozbehového momentu vedie k tomu, že maximálny krútiaci moment motora sa dosiahne s väčším sklzom (bod S 2 krivky B na Obr. 224). Zvýšením aktívneho odporu obvodu rotora pri rozbehu je možné zabezpečiť, že maximálny krútiaci moment bude v momente rozbehu (s = 1 krivka C).
Krútiaci moment asynchrónneho motora je úmerný štvorcu napätia, takže aj malý pokles napätia je sprevádzaný prudkým poklesom krútiaceho momentu.
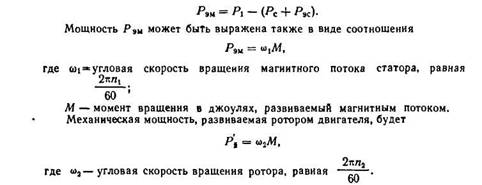
Výkon P 1 dodávaný do vinutia statora asynchrónneho motora sa rovná:
![]()
kde m 1 je počet fáz.
Stator motora má nasledujúce straty energie:
1) vo vinutí statora R es. = m1112r1;
2) v statorovej oceli je hysterézia a vírivé prúdy Р C .
Energia dodávaná rotoru je výkon rotujúceho magnetického poľa, nazývaný tiež elektromagnetický výkon P eM.
Elektromagnetický výkon sa rovná rozdielu medzi výkonom dodávaným do motora a stratami v statore motora, t.j.
|
Rozdiel medzi R eM a predstavuje elektrické straty vo vinutí rotora Р eP, ak zanedbáme straty v oceli rotora v dôsledku ich nevýznamnosti (frekvencia prevrátenia magnetizácie rotora je zvyčajne veľmi malá):
Preto sú straty vo vinutí rotora úmerné sklzu rotora.
Ak od mechanická sila vyvinuté rotorom, odpočítajte mechanické straty P mx spôsobené trením v ložiskách rotora, trením o vzduch atď., ako aj dodatočné straty P D vznikajúce pri zaťažení a spôsobené rozptylovými poľami rotora a straty spôsobené: pulzáciami magnetického poľa v zuboch statora a rotora, potom zostane užitočná sila na hriadeli motora, ktorý označujeme P 2.
Účinnosť asynchrónneho motora možno určiť podľa vzorca:

Z posledného výrazu je vidieť, že rotačný moment asynchrónneho motora je úmerný súčinu hodnoty rotujúceho magnetického toku, rotorového prúdu a kosínusu uhla medzi e. d.s. rotor a jeho prúd,

Z ekvivalentného obvodu asynchrónneho motora sa získa hodnota redukovaného rotorového prúdu, ktorú uvádzame bez dôkazu.
Krútiaci moment vyvíjaný motorom sa rovná elektromagnetickému výkonu vydelenému synchrónnou rýchlosťou otáčania elektrického pohonu.
M = Pem/ω0
Elektromagnetický výkon je výkon prenášaný vzduchovou medzerou zo statora na rotor a rovná sa stratám v rotore, ktoré sú určené vzorcom:
P em = m I 2 2 (r 2 '/s)
m – počet fáz.
M = Mem = (Pm/ω 0) (I2') 2 (r2'/s)
Elektromechanickou charakteristikou asynchrónneho motora je závislosť I2' od sklzu. Ale keďže asynchrónny stroj funguje len ako elektromotor, hlavnou charakteristikou je mechanická charakteristika.
M = Me m = (Pm/ω 0) (I 2 ') 2 (r 2 '/s) - zjednodušené vyjadrenie mechanickej charakteristiky.
Dosadením aktuálnej hodnoty do tohto výrazu dostaneme: M = / [ω 0 [(r 1 + r 2 '/s) 2 + (x 1 + x 2 ') 2 ]]
Namiesto ω 0 je potrebné nahradiť mechanickú rýchlosť, v dôsledku čoho sa zníži počet pólových párov.
M = / [ω 0 [(r 1 + r 2 ’/s) 2 + (x 1 + x 2 ’) 2 ]] je rovnica pre mechanické charakteristiky asynchrónneho motora.
Keď asynchrónny motor vstúpi do režimu generátora, rýchlosť otáčania ω > ω 0 a sklz bude záporný (s Keď sa sklz zmení z 0 na +∞, režim sa nazýva „režim elektromagnetickej brzdy“.
Zadaním hodnôt sklzu od o do +∞ získame charakteristiku:
Kompletné mechanické vlastnosti asynchrónneho motora.
Ako je zrejmé z mechanických charakteristík, má dva extrémy: jeden v intervale zmeny sklzu v oblasti od 0 do +∞, druhý v intervale od 0 do -∞. dM/ds = 0
M max = / ] + sa vzťahuje na režim motora. – odkazuje na režim generátora.
M max =M cr M cr – kritický moment.
Sklz, pri ktorom moment dosiahne svoje maximum, sa nazýva kritický sklz a je určený vzorcom: s cr = ±
Kritický sklz má rovnaký význam v režime motora aj generátora.
Hodnotu Mcr možno získať dosadením hodnoty kritického sklzu do vzorca krútiaceho momentu.
Posuvný krútiaci moment rovný 1 sa nazýva počiatočný krútiaci moment. Výraz pre počiatočný krútiaci moment možno získať dosadením 1 do vzorca:
Mp = / [ω 0 [(r 1 + r 2 ’) 2 + (x 1 + x 2 ’) 2 ]]
Keďže menovateľ vo vzorci maximálneho momentu je o niekoľko rádov väčší ako U f, všeobecne sa uznáva, že M cr ≡U f 2.
Kritický sklz závisí od hodnoty aktívneho odporu vinutia rotora R2'. Počiatočný krútiaci moment, ako je zrejmé zo vzorca, závisí od aktívneho odporu rotora r 2 '. Táto vlastnosť rozbehového momentu sa využíva pri asynchrónnych motoroch s vinutým rotorom, u ktorých sa rozbehový moment zvyšuje zavedením aktívneho odporu do obvodu rotora.
7.Transformátor naprázdno
Režim voľnobežné otáčky transformátor je prevádzkový režim, keď je jedno z vinutí transformátora napájané zo zdroja so striedavým napätím a s otvorenými obvodmi ostatných vinutí. Skutočný transformátor môže mať tento režim prevádzky, keď je pripojený k sieti a záťaž napájaná z jeho sekundárneho vinutia ešte nie je zapnutá. Prúd I 0 prechádza primárnym vinutím transformátora, zatiaľ čo v sekundárnom vinutí nie je žiadny prúd, pretože jeho obvod je otvorený. Prúd I 0 prechádzajúci primárnym vinutím vytvára v magnetickom obvode sínusovo sa meniaci žľab Ф 0, ktorý v dôsledku magnetických strát zaostáva vo fáze s prúdom o stratový uhol δ. 
![]()
Graficky vyjadrená závislosť elektromagnetického krútiaceho momentu na sklze je tzv mechanické vlastnosti asynchrónny motor (obr. 3.3).
Ryža. 3.3. Mechanické vlastnosti asynchrónneho motora
Na vytvorenie mechanickej charakteristiky možno použiť zjednodušený vzorec na výpočet elektromagnetického krútiaceho momentu asynchrónneho motora (Klossov vzorec).
V tomto prípade je kritický sklz určený vzorcom
![]()
kde λ m = M max / M nom - preťaženie motora.
Pri výpočte mechanických charakteristík je potrebné mať na pamäti, že pri hodnotách sklzu presahujúcich kritickú hodnotu sa presnosť výpočtov prudko znižuje. Vysvetľuje to zmena parametrov ekvivalentného obvodu asynchrónneho motora spôsobená magnetickým nasýtením zubov statora a rotora a zvýšením frekvencie prúdu vo vinutí rotora.
Tvar mechanických charakteristík asynchrónneho motora do značnej miery závisí od napätia aplikovaného na vinutie statora U 1 (obr. 3.4) a aktívny odpor vinutia rotora r 2 (obr. 3.5).
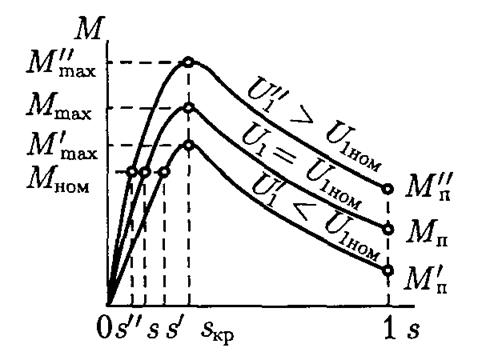
Ryža. 3.4. Vplyv napätia U 1 o mechanických charakteristikách asynchrónneho motora
Údaje uvedené v katalógoch pre asynchrónne motory zvyčajne neobsahujú informácie o parametroch náhradného obvodu, čo sťažuje použitie vzorcov na výpočet elektromagnetického momentu. Preto sa na výpočet elektromagnetického krútiaceho momentu často používa vzorec
Ryža. 3.5. Vplyv odporu r" 2 o mechanických charakteristikách asynchrónneho motora
Prevádzkové vlastnosti asynchrónneho motora sú určené jeho prevádzkovými charakteristikami: závislosťou rýchlosti otáčania n 2, krútiaci moment na hriadeli M 2, účinnosť a účinník cosφ 1 od užitočného zaťaženia motora R 2 .
Pri výpočte parametrov na určenie výkonnostných charakteristík a synchrónne motory Používajú buď grafickú metódu, ktorá je založená na konštrukcii koláčového grafu, alebo analytickú metódu.
Základom pre vykonávanie ktorejkoľvek z metód výpočtu výkonu sú výsledky experimentov naprázdno a nakrátko. Ak sa motor navrhuje, potom sa tieto údaje získajú pri jeho výpočte.
Pri výpočte odporov rezistorov r pridať, používa sa v obvodoch statora alebo vinutého rotora na obmedzenie štartovacieho prúdu alebo riadenie rýchlosti otáčania, použite princíp: pre tento konkrétny asynchrónny motor sklz súmerné aktívnemu odporu obvodu rotora tohto motora. V súlade s tým platí rovnosť
(r 2 + r ext) /s= r 2 /s nom,
Kde r 2- aktívny odpor samotného vinutia rotora pri prevádzkovej teplote; s- posuvné, keď je do obvodu rotora zavedený odpor s odporom r ext.
Z tohto výrazu získame vzorec na výpočet aktívneho odporu prídavného odporu g to6, potrebného na získanie daného zvýšeného sklzu s pri danom (nominálnom) zaťažení:
r ext = r 2 (s/s č. - 1).
Existujú dva spôsoby výpočtu počiatočných reostatov: grafické a analytické.
Grafická metóda presnejšie, ale vyžaduje konštrukciu prirodzenej mechanickej charakteristiky a štartovacieho diagramu motora, s čím je spojené veľké množstvo grafickej práce.
Analytická metóda výpočet štartovacích reostatov je jednoduchší, ale menej presný. Je to spôsobené tým, že metóda je založená na predpoklade, že pracovný úsek prirodzenej mechanickej charakteristiky asynchrónneho motora je rovný. Keď je však kĺzanie blízko kritickému bodu, tento predpoklad spôsobí viditeľnú chybu, ktorá je tým významnejšia, čím bližšie je počiatočný počiatočný moment M 1 na maximálny krútiaci moment M m ah. Preto je metóda analytického výpočtu použiteľná iba pre hodnoty počiatočného rozbehového momentu M 1 < 0,7· M m ah .
Odpory rezistorov v počiatočných fázach reostatu:
tretí r ext3 = r 2 (Am-1);
druhý r ext2 = r ext3 A m;
najprv r ext1 = r ext2 λ m,
Kde r 2 - aktívny odpor fázového vinutia rotora asynchrónneho motora,
Kde E 2 a ja 2nom - katalógové údaje pre zvolenú veľkosť motora.
Odolnosť štartovacieho reostatu v jeho fázach:
prvý R PR1 = r ext1 + r ext2 + r ext3;
druhý R PR2 = r ext2 + r ext3
tretí R PR2 = r ext3.
Na obmedzenie štartovacieho prúdu asynchrónnych motorov s rotor vo veveričkešpeciálne obvody na ich zaradenie sa používajú s prvkami, ktoré obmedzujú štartovací prúd. Všetky tieto metódy sú založené na znížení napätia dodávaného do vinutia statora. Väčšina aplikácií prijaté obvody so zahrnutím rezistorov alebo tlmiviek v lineárnych vodičoch statora (pozri obr. 3.14, b Výpočet požadovaného odporu týchto prvkov pre dané zníženie štartovacieho prúdu a vzhľadom na jeho prirodzenú hodnotu sa vykonáva pomocou vzorcov:
pre rezistory s aktívnym odporom
R n = 
na tlmivky
X L= 
Impedancia motor v režime skratu Z k, Ohm,
Z k =U 1 /ja n
Tu X do a r k - indukčné a aktívne zložky tohto odporu
R k = Z k cosφ k; x k =
Zníženie umelého rozbehového momentu pri zapnutí R alebo L bude
am = a2 i
Tabuľka 3.1
Ak je teda daná hodnota α m, ktorá určuje hodnotu umelého rozbehového momentu M" p, potom na výpočet zodpovedajúcich hodnôt R p alebo xL vyššie uvedené vzorce môžete použiť tak, že v nich dosadíte namiesto α 2 i, hodnota α m.
Elektrický odpor Vinutia motora uvedené v katalógoch zvyčajne zodpovedajú teplote +20 °C. Ale pri výpočte charakteristík a parametrov motorov je potrebné uviesť odpor ich vinutí na prevádzkovú teplotu. V súlade s platnou normou sa prevádzková teplota odoberá v závislosti od triedy tepelnej odolnosti elektrická izolácia použité v motore: pri triede tepelnej odolnosti B je prevádzková teplota 75 °C a pri triede tepelnej odolnosti F a H - 115 °C. Prepočet odporu vinutia na prevádzkovú teplotu sa vykoná vynásobením odporu vinutia pri teplote 20 °C súčiniteľom ohrevu k t:
r= r 20 tis t.
Hodnoty tohto koeficientu sa berú v závislosti od účelu motorov a ich rozmerov (výška osi otáčania) (tabuľka 3.1).
SYNCHRONÓZNE STROJE
ZÁKLADNÉ POJMY
Charakteristickým znakom synchrónne stroje je pevné spojenie medzi otáčkami rotora n 1 a frekvenciu AC vo vinutí statora f 1:
n 1 = f 1 60/ r.
Inými slovami, rotujúce magnetické pole statora a rotora synchrónneho stroja sa otáčajú synchrónne, teda s rovnakou frekvenciou.
Synchrónne stroje sa podľa konštrukcie delia na vyčnievajúce póly a bez pólov. V synchrónnych strojoch s vyčnievajúcimi pólmi má rotor vyčnievajúce póly, na ktorých sa navíjajú cievky vinutia napájané z DC. Charakteristickým znakom takýchto strojov je rozdiel v magnetickom odpore pozdĺž pozdĺžnej osi (pozdĺž osi pólov) a pozdĺž priečnej osi (pozdĺž osi prechádzajúcej v interpolárnom priestore). Magnetická odolnosť voči toku statora pozdĺž pozdĺžnej osi dd oveľa menší magnetický odpor voči toku statora pozdĺž priečnej osi qq. V synchrónnych strojoch bez vyčnievajúcich pólov sú magnetické odpory pozdĺž pozdĺžnej a priečnej osi rovnaké, pretože vzduchová medzera týchto strojov po obvode statora je rovnaká.
Konštrukcia statora synchrónneho stroja sa v zásade nelíši od statora asynchrónneho stroja. Vo vinutí statora sa počas prevádzky stroja indukuje EMF a tečú prúdy, ktoré vytvárajú magnetomotorickú silu (MF), ktorej maximálna hodnota je
F 1 =0,45m 1 ja 1 w 1 k rev1 / r
Tento MMF vytvára rotujúce magnetické pole a vo vzduchovej medzere δ stroja vzniká magnetická indukcia, ktorej graf rozloženia v rámci každého pólového delenia t závisí od konštrukcie rotora (obr. 4.1).
Pre synchrónny stroj s výraznými pólmi platí rovnica napätia:
Ú 1 =Ė 0 + Ė 1 d + Ė 1 q + Ė σ1 – İ 1 r 1
Kde Ė 0 - hlavný EMF synchrónneho stroja, úmerný hlavnému magnetickému toku synchrónneho stroja F 0 ; Ė 1 d - EMF reakcie kotvy synchrónneho stroja pozdĺž pozdĺžnej osi, úmerné MMF reakcie kotvy pozdĺž pozdĺžnej osi F 1d; Ė σ1 - EMF reakcie kotvy pozdĺž priečnej osi, úmerné MMF reakcie kotvy pozdĺž priečnej osi F 1 q; Ė σ1 - únikové emf v dôsledku prítomnosti magnetického únikového toku F 0, veľkosť tohto EMF je úmerná indukčnému zvodovému odporu vinutia statora X 1
Ė σ1 = jİ 1 r
İ 1 r 1 - aktívny pokles napätia vo fázovom vinutí statora zvyčajne je táto hodnota zanedbaná pri riešení problémov kvôli jej malej hodnote;
Ryža. 4.1. Grafy rozloženia magnetickej indukcie pozdĺž priečnej osi
nevyčnievajúci pól ( A) a vyčnievajúci pól ( b)synchrónne stroje:
1 - rozvrh MDS; 2 - graf magnetického toku
Pre synchrónny stroj s nevyčnievajúcimi pólmi má napäťová rovnica tvar
Ú 1 =Ė 0 + Ė c – İ 1 r 1
Tu
Ė c = Ė 1 + Ė σ1
Kde Ė 1 - EMF reakcia kotvy synchrónneho stroja s nevyčnievajúcimi pólmi. Vyššie uvedené rovnice napätia zodpovedajú diagramom vektorov napätia. Tieto diagramy musia byť skonštruované na určenie buď hlavného EMF stroja E 0, alebo napätie vinutia statora U 1. Treba mať na pamäti, že napäťové rovnice a zodpovedajúce vektorové diagramy nezohľadňujú magnetickú saturáciu magnetického obvodu synchrónneho stroja, ktorá, ako je známe, ovplyvňuje hodnotu indukčných reaktancií, čo spôsobuje, že znížiť. Zohľadnenie tejto saturácie je náročná úloha, preto pri výpočte EMF a napätí synchrónnych strojov zvyčajne používajú praktická schéma EMF, ktorý zohľadňuje stav nasýtenia magnetického systému spôsobený pôsobením reakcie kotvy pri zaťažení synchrónneho stroja. Pri konštrukcii praktického diagramu EMF sa magnetizačná sila reakcie kotvy nerozloží na pozdĺžne a priečne zložky, preto je možné tento diagram použiť ako pri výpočtoch strojov s vyvýšenými pólmi, tak aj bez nich.
Pri riešení problémov súvisiacich buď so synchrónnymi generátormi zapojenými paralelne so sieťou, alebo so synchrónnymi motormi, využívajú uhlové charakteristiky synchrónne stroje, predstavujúce závislosť elektromagnetického krútiaceho momentu M na uhle zaťaženia θ. Malo by sa pamätať na to, že v synchrónnych strojoch s výraznými pólmi fungujú dva body: hlavný M základné a reaktívne M p a v strojoch s nevýraznými pólmi - iba hlavný bod:
![]()
Záťažový uhol θ nom zodpovedá menovitému krútiacemu momentu M nom. Maximálny krútiaci moment synchrónneho stroja určuje preťažiteľnosť synchrónneho stroja, čo je dôležité ako pre synchrónne generátory pracujúce paralelne so sieťou, tak aj pre synchrónne motory. V synchrónnych strojoch bez vyčnievajúcich pólov maximálny krútiaci moment zodpovedá zaťažovaciemu uhlu θ = 90°, v strojoch s vyvýšenými pólmi θ cr< 90° и обычно составляет 60 - 80° в зависимости от соотношения основного и реактивного elektromagnetické momenty toto auto.
Na výpočet kritického uhla zaťaženia, ktorý určuje kapacitu preťaženia synchrónnych strojov s výraznými pólmi, môžete použiť výraz.