Ogólnie, silnik elektryczny reprezentuje urządzenie elektromechaniczne, który przekształca energię elektryczną w energię mechaniczną.
W zależności od rodzaju połączenia silniki są jednofazowe i trójfazowe. Wśród silników trójfazowych najczęściej spotykane są silniki elektryczne indukcyjne (asynchroniczne) i synchroniczne.
Kiedy o 3 silnik fazowy przewodniki elektryczne znajdują się w określonym położeniu geometrycznym (pod pewnym kątem względem siebie), tak jest pole elektryczne. Wytworzone pole elektromagnetyczne wiruje z określoną prędkością, którą nazywamy prędkością synchroniczną.
Jeśli w wirującym polu magnetycznym znajduje się elektromagnes, zostaje on magnetycznie zblokowany z tym wirującym polem i obraca się z prędkością tego pola. W rzeczywistości jest to silnik nieregulowany, ponieważ ma tylko jedną prędkość, która jest synchroniczna i nie może być żadnych prędkości pośrednich. Innymi słowy, działa synchronicznie z częstotliwością sieci. Poniżej znajduje się wzór na prędkość synchroniczną:
W zasadzie jego konstrukcja jest prawie podobna do 3-fazowego silnika asynchronicznego, z tym wyjątkiem, że do wirnika dostarczane jest źródło DC(zajmiemy się tym później). Na razie spójrzmy na główną strukturę tego typu silnik.
Rysunek pokazuje konstrukcję tego typu silnika. Stojan jest dostarczany z 3 napięcie fazowe i do wirnika - źródło prądu stałego.
Podstawowe właściwości silników synchronicznych:
- Synchroniczne silniki elektryczne nie są mechanizmami samostartującymi. Wymagają pewnego wpływ zewnętrzny do wytworzenia określonej prędkości synchronicznej.
- Silnik pracuje synchronicznie z częstotliwością sieć elektryczna. Dlatego też, zapewniając nieprzerwane zasilanie częstotliwością, zachowuje się jak silnik o stałej prędkości.
- Ten silnik ma unikalne cechy, pracując przy dowolnym współczynniku mocy. Dlatego stosuje się je w celu zwiększenia współczynnika wytrzymałości.
Wideo: Budowa i zasada działania silnika synchronicznego
Zasada działania silnika synchronicznego
Pole elektronowo-magnetyczne silnika synchronicznego zapewnia dwa wejścia elektryczne. Jest to uzwojenie stojana, które składa się z 3 faz i zapewnia 3 fazy źródła zasilania oraz wirnika zasilanego prądem stałym.
3 fazy uzwojenia stojana zapewniają obrót strumienia magnetycznego. Wirnik przyjmuje prąd stały i wytwarza stały strumień. Przy częstotliwości 50 Hz przepływ trójfazowy obraca się z prędkością około 3000 obrotów na minutę lub 50 obrotów na sekundę. W pewnym momencie bieguny wirnika i stojana mogą mieć tę samą polaryzację (++ lub – –), co powoduje odpychanie wirnika. Następnie polaryzacja natychmiast się zmienia (+–), co powoduje przyciąganie.
Jednak wirnik ze względu na swoją bezwładność nie jest w stanie obracać się w żadnym kierunku pod wpływem siły przyciągania lub siły odpychania i nie może pozostać bezczynny. Nie uruchamia się samoczynnie.
Aby pokonać bezwładność siły, pewne uderzenie mechaniczne, który obraca wirnik w tym samym kierunku co pole magnetyczne, zapewniając wymaganą prędkość synchroniczną. Po pewnym czasie pole magnetyczne zamyka się i silnik synchroniczny obraca się z określoną prędkością.
Metody uruchamiania
- Rozruch silnika synchronicznego za pomocą silnika pomocniczego. Silnik synchroniczny jest mechanicznie sprzężony z innym silnikiem. Może to być silnik indukcyjny trójfazowy lub silnik prądu stałego. Prąd stały nie jest początkowo dostarczany. Silnik zaczyna się obracać z prędkością zbliżoną do prędkości synchronicznej, po czym przykładany jest prąd stały. Po zamknięciu pola magnetycznego komunikacja z silnikiem pomocniczym zostaje zakończona.
- Start asynchroniczny. W nabiegunnikach biegunów wirnika zamontowane jest dodatkowe uzwojenie zwierane. Po włączeniu napięcia w uzwojeniu stojana pojawia się wirujące pole magnetyczne. Przechodząc przez zwarte uzwojenie, które jest osadzone w nabiegunnikach wirnika, to wirujące pole magnetyczne indukuje w nim prądy, które oddziałując z polem wirującym stojana, powodują obrót wirnika. Po osiągnięciu prędkości synchronicznej siła emf i moment obrotowy zmniejszają się. Wreszcie, gdy pole magnetyczne zamyka się, moment obrotowy również zmniejsza się do zera. Zatem synchronizm jest najpierw uruchamiany przez silnik indukcyjny za pomocą dodatkowego uzwojenia.
Aplikacja
- Silnik synchroniczny służy do poprawy współczynnika mocy. Silniki synchroniczne są szeroko stosowane w systemie elektroenergetycznym, ponieważ działają przy dowolnym współczynniku mocy i charakteryzują się ekonomiczną wydajnością.
- Silniki synchroniczne znajdują zastosowanie tam, gdzie prędkość robocza nie przekracza 500 obr/min i wymagana jest zwiększona moc. W przypadku zapotrzebowania na moc od 35 kW do 2500 kW koszt, rozmiar, waga i odpowiedni silnik indukcyjny będą dość wysokie. Silniki takie są często używane do napędzania pomp tłokowych, sprężarek, walcarek i innego sprzętu.
Silnik synchroniczny. Zasada działania i urządzenie. Silnik synchroniczny może pracować jako generator i silnik. Silnik synchroniczny jest zaprojektowany w taki sam sposób jak generator synchroniczny. Jego uzwojenie twornika I (ryc. 291, a) jest podłączone do źródła trójfazowego AC; uzwojenie wzbudzenia 2 zasilane jest prądem stałym ze źródła zewnętrznego. Ze względu na oddziaływanie wirującego pola magnetycznego 4 wytworzonego przez trójfazowe uzwojenie twornika i pola wytworzonego przez uzwojenie wzbudzenia, moment elektromagnetyczny M (ryc. 291, b), powodując obrót wirnika 3. Jednakże w silniku synchronicznym, w odróżnieniu od silnika asynchronicznego, wirnik będzie przyspieszał do prędkości obrotowej n = n 1, przy której wiruje pole magnetyczne (do prędkości synchronicznej). Wyjaśnienie
Wynika to z faktu, że prąd w uzwojeniu wirnika zasilany jest ze źródła zewnętrznego i nie jest w nim indukowany przez pole magnetyczne stojana, a zatem nie zależy od prędkości obrotowej wału silnika. Cecha charakterystyczna silnika synchronicznego jest stałą prędkością jego wirnika, niezależnie od obciążenia.
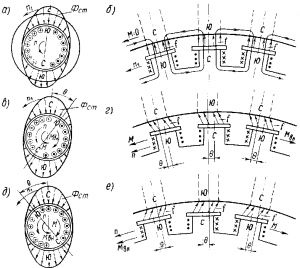
Moment elektromagnetyczny. Moment elektromagnetyczny w silniku synchronicznym powstaje w wyniku oddziaływania strumienia magnetycznego wirnika (strumień wzbudzenia Ф в) z wirującym polem magnetycznym wytwarzanym przez prąd trójfazowy przepływający przez uzwojenie twornika (strumień twornika Ф в). Na na biegu jałowym maszyna osie pól magnetycznych stojana i wirnika pokrywają się (ryc. 292, a). Dlatego siły elektromagnetyczne I powstające między „biegunami” stojana a biegunami wirnika są skierowane promieniowo (ryc. 292, b), a moment elektromagnetyczny maszyny wynosi zero. Gdy maszyna pracuje w trybie silnikowym (rys. 292, c i d), jej wirnik pod wpływem zewnętrznego momentu obciążenia M ext przyłożonego do wału zostaje przesunięty o pewien kąt 0 w stosunku do kierunku obrotu. W tym przypadku w wyniku oddziaływania elektromagnetycznego pomiędzy wirnikiem a stojanem powstają siły elektromagnetyczne I skierowane w kierunku obrotu, czyli powstaje wirujący moment elektromagnetyczny M, który ma tendencję do pokonywania działania momentu zewnętrznego M wew. Maksymalny moment obrotowy Mmaks
pasuje do kąta? = 90°, gdy osie biegunów wirnika znajdują się pomiędzy osiami „biegunów” stojana.
Jeżeli moment obciążenia M ext przyłożony do wału silnika elektrycznego stanie się większy niż M max, wówczas silnik zatrzymuje się pod wpływem zewnętrznego momentu obrotowego M ext; w tym przypadku przez uzwojenie twornika silnika stacjonarnego przepłynie bardzo duży prąd. Ten tryb nazywa się utratą synchronizmu; jest to stan awaryjny i nie powinien być dozwolony.
Kiedy maszyna pracuje w trybie generatora (ryc. 292, e i f), wirnik pod wpływem zewnętrznego momentu obrotowego M ext przyłożonego do wału przesuwa się o kąt? w kierunku obrotu. W tym przypadku powstają siły elektromagnetyczne skierowane przeciwnie do obrotu, czyli powstaje hamujący moment elektromagnetyczny M. Zatem gdy zmienia się wartość i kierunek zewnętrznego momentu obrotowego na wale wirnika M ext, zmienia się tylko kąt? pomiędzy osiami pól stojana i wirnika, natomiast w maszynie asynchronicznej w tym przypadku zmienia się prędkość obrotowa wirnika.
Uruchomienie i kontrola prędkości.Silnik synchroniczny nie ma inicjału moment rozruchowy . Jeśli podłączysz uzwojenie twornika do sieci prądu przemiennego, gdy wirnik jest nieruchomy, a przez uzwojenie wzbudzenia przepływa prąd stały, to w jednym okresie zmiany prądu moment elektromagnetyczny dwukrotnie zmieni swój kierunek, tj. średni moment obrotowy w tym okresie wyniesie równy zeru. W związku z tym, aby uruchomić silnik synchroniczny, należy rozpędzić jego wirnik za pomocą zewnętrznego momentu obrotowego do prędkości obrotowej zbliżonej do synchronicznej. W tym celu używają metoda start asynchroniczny . Silnik synchroniczny uruchamiany jest jako asynchroniczny, dla którego jest wyposażony w specjalne zwarte uzwojenie rozruchowe 3 (ryc. 293). W nabiegunnikach wirnika 2 silnika synchronicznego umieszcza się pręty miedziane lub mosiężne, zwarte dwoma pierścieniami końcowymi. Uzwojenie początkowe ma konstrukcję przypominającą klatkę wiewiórkową maszyny asynchronicznej, ale zajmuje tylko część obwodu wirnika. Niektóre silniki mają specjalne uzwojenie zwarte
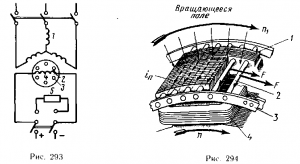 Ryż. 293. Schemat asynchronicznego rozruchu silnika synchronicznego;
Ryż. 293. Schemat asynchronicznego rozruchu silnika synchronicznego;
Ryż. 294 Urządzenie do uruchamiania uzwojenia silnika synchronicznego: 1 - wirnik; 2 - pręty; 3 - pierścień; 4 - uzwojenie pola
Silniki elektryczne występują w dwóch głównych typach – synchronicznych i asynchronicznych. Jakie są oba?
Co to jest silnik synchroniczny?
DO synchroniczny W konstrukcji urządzenia zwyczajowo mówi się o silnikach elektrycznych zasilanych prądem przemiennym i posiadających wirnik o prędkości obrotowej odpowiadającej prędkości pola magnetycznego.
Kluczowe elementy synchronicznego silnika elektrycznego:
- kotwica;
- induktor.
Pierwszy element zespołu znajduje się na stojanie. Cewka jest umieszczona na wirniku, który jest oddzielony od stojana szczeliną powietrzną. Struktura twornika jest reprezentowana przez uzwojenie (jedno lub więcej). Prądy dostarczane do odpowiedniego elementu silnika tworzą pole magnetyczne, które wiruje z określoną częstotliwością i oddziałuje z polem cewki indukcyjnej. Cewka zawiera 2 bieguny - w postaci magnesów trwałych.
Jednostka synchroniczna może pracować w dwóch trybach:
- jak sam silnik elektryczny;
- jak generator.
Pierwszy tryb pracy polega na oddziaływaniu pola magnetycznego powstającego na tworniku i pola powstającego na biegunach cewki indukcyjnej. Silnik synchroniczny w trybie generatora działa z powodu indukcja elektromagnetyczna: gdy wirnik się obraca, pole magnetyczne powstające na uzwojeniu oddziałuje z kolei z fazami uzwojenia stojana, powodując powstanie siły elektromotorycznej.
Co to jest asynchroniczny silnik elektryczny?
DO asynchroniczny Zwyczajowo odnosi się to do silników elektrycznych, w których prędkość obrotowa jednego z nich kluczowe elementy- wirnik - nie pokrywa się z częstotliwością wirowania pola magnetycznego utworzonego przez prąd występujący na uzwojeniu stojana. Jednostki asynchroniczne są czasami nazywane jednostkami indukcyjnymi. Dzieje się tak dlatego, że w uzwojeniu wirnika indukuje się prąd pod wpływem pola magnetycznego stojana.
W projektowaniu asynchroniczny silnik elektryczny Jest stojan i wirnik, które są oddzielone szczeliną powietrzną. Główne aktywne elementy urządzenia:
- meandrowy;
- obwód magnetyczny
Dodatkowe elementy odgrywają ważną rolę w działaniu silnika asynchronicznego. elementy konstrukcyjne, które zapewniają wytrzymałość, chłodzenie i stabilność urządzenia.
Porównanie
Główną różnicą między silnikiem synchronicznym a silnikiem asynchronicznym jest zależność prędkości obrotowej wirnika od pola magnetycznego. W pierwszym typie jednostek oba wskaźniki są takie same. W maszynie asynchronicznej - inaczej.
Można zauważyć, że silniki elektryczne drugiego typu są na ogół częstsze niż pierwsze. Jednocześnie jednostki asynchroniczne są najczęściej prezentowane w odmianie, w której zainstalowany jest wirnik klatkowy. Urządzenia te mają numer najważniejsze zalety przed silnikami elektrycznymi innych kategorii. Mianowicie:
- prostota konstrukcji, niezawodność;
- stosunkowo niski koszt produkcji i eksploatacji;
- możliwość pracy z wykorzystaniem istniejących zasobów sieciowych bez konieczności podłączania konwerterów.
Jednocześnie maszyny asynchroniczne z wirnik klatkowy Mają też szereg wad. Mianowicie:
- obecność niskiego momentu rozruchowego;
- obecność dużego prądu rozruchowego;
- obniżony współczynnik mocy;
- niska sterowność pod względem regulacji prędkości;
- uzależnienie maksymalna prędkość na częstotliwości sieci elektrycznej;
- Moment elektromagnetyczny w silnikach asynchronicznych tego typu charakteryzuje się dużą wrażliwością na spadek napięcia w sieci.
Z kolei jednostki synchroniczne mają także niezaprzeczalne zalety. Należą do nich:
- stosunkowo mała wrażliwość na zmiany napięcia w sieci;
- stabilność obrotów niezależnie od obciążenia wirnika.
Silniki synchroniczne mają również wady:
- względna złożoność projektu;
- trudności z uruchomieniem wirnika.
Wskazane cechy pracy jednostek synchronicznych i asynchronicznych sprawiają, że optymalne jest wykorzystanie tej pierwszej, jeśli wymagana moc silnika w systemie (na przykład w ramach infrastruktury linii fabrycznej) powinna wynosić około 100 kW i więcej. W innych przypadkach korzystanie z maszyn asynchronicznych z reguły staje się bardziej preferowane.
Po rozważeniu różnicy między silnikiem synchronicznym i asynchronicznym, wnioski przedstawimy w tabeli.
Silnik synchroniczny to maszyna trójfazowa, której wirnik zasilany jest prądem stałym. Częstotliwość obrotu wirnika jest równa częstotliwości obrotu pola magnetycznego stojana. Zależność tę wyznacza częstotliwość prądu w sieci oraz liczba par biegunów
Ryż. Schemat rozruchu silnika synchronicznego.
1 – uzwojenie wzbudzenia; 2 – przełącznik; 3 – opór początkowy; 4 – zwarte uzwojenie wirnika; 5 – uzwojenie stojana; 6 – przełącznik; 7 – kotwica wzbudnicy; 9 uzwojenia wzbudnicy
Stojan silnika synchronicznego nie różni się od stojana silnika asynchronicznego. Wirnik składa się z wyraźnych biegunów dla silników o niskiej prędkości i ukrytych biegunów dla silników o dużej prędkości.
Zasada działania silnika synchronicznego opiera się na oddziaływaniu elektromagnetycznym pomiędzy biegunami wirującego pola magnetycznego stojana a biegunami wirnika, powstającym w wyniku dopływu prądu stałego do uzwojenia wirnika. Jednak po włączeniu silnika wirnik wibruje, ale się nie obraca, ponieważ prąd przemienny zmienia swój kierunek z częstotliwością 50 Hz, tworząc ciągłe wstrząsy w obu kierunkach.
Aby zapewnić rozruch silnika synchronicznego, jego wirnik oprócz uzwojenia wzbudzenia jest wyposażony w dodatkowe uzwojenie rozruchowe (zwarte lub fazowe). Takie uzwojenie zapewnia asynchroniczność jak zwykle przy pełnym lub obniżonym napięciu. Kiedy wirnik silnika osiąga prędkość obrotową bliską synchronicznej, do uzwojenia wzbudzenia doprowadzany jest prąd stały i silnik zaczyna pracować w trybie synchronicznym.
Kiedy wirnik silnika osiąga prędkość obrotową bliską synchronicznej, do uzwojenia wzbudzenia doprowadzany jest prąd stały, po czym silnik zaczyna pracować w trybie synchronicznym.
Jednocześnie dodatkowe rozpoczęcie nawijania nie ma żadnego efektu, ponieważ obracając się synchronicznie z polem magnetycznym, nie przecina się z liniami magnetycznymi i nie indukują się w nim żadne prądy ani nie wytwarza się żaden moment obrotowy. Uzwojenie wzbudzenia zasilane jest ze specjalnych generatorów prądu stałego lub z prostowników półprzewodnikowych.
Po uruchomieniu silnika synchronicznego, jeśli obciążenie wału wynosi zero, wektor napięcia pokrywa się z wektorem indukowanej siły elektromotorycznej. Jeżeli na wał silnika zostanie przyłożony moment obrotowy, pomiędzy wskazanymi wektorami pojawi się kąt przesunięcia θ i silnik zacznie wytwarzać moment obrotowy, którego wielkość będzie funkcją kąta θ
![]()
Gdzie jest napięcie stojana; E – SEM indukowany w uzwojeniu stojana przez pole magnetyczne wirnika; ω – prędkość kątowa pole magnetyczne stojana; x 1 – reaktancja indukcyjna uzwojenia stojana.
To równanie jest charakterystyka kątowa silnik synchroniczny. Moment obrotowy silnika wzrasta wraz ze zmianą kąta θ od 0 do 90°, a następnie maleje. Moment osiąga swoją wartość maksymalną przy θ=90°. Przy większym kącie praca silnika staje się niestabilna, a wzrost obciążenia prowadzi do zakłócenia synchronizmu i zatrzymania. Nominalny moment obrotowy odpowiada kątowi θ=25÷30° (sinθ=0,43÷0,50) W tym przypadku zdolność przeciążeniowa
λ ![]()
Wraz ze wzrostem prądu wzbudzenia, tj. dostarczany do uzwojenia wirnika, obciążalność silnika wzrasta, a wraz ze spadkiem maleje. Ale jak widać z równania, moment obrotowy silnika jest proporcjonalny do pierwszej potęgi napięcia, co czyni go mniej wrażliwym na wahania napięcia w sieci w porównaniu z silnikiem asynchronicznym. Prędkość wirnika silnika synchronicznego nie zależy od obciążenia i pozostaje stała we wszystkich trybach. Dlatego właściwości mechaniczne takich silników są absolutnie sztywne. Silniki synchroniczne służą do napędzania maszyn ze stałą prędkością obrotową.

Ryż. Charakterystyka mechaniczna silnika synchronicznego
Główne zalety silnika synchronicznego:
Prędkość obrotowa nie zależy od obciążenia;
Możliwość pracy z zaawansowanymi cosφ
Mniejsza zależność momentu obrotowego od napięcia sieciowego niż w przypadku silników asynchronicznych
Wady silnika synchronicznego:
Konieczność posiadania dwóch rodzajów prądu;
Trudność w uruchomieniu;
Możliwość awarii synchronizacji z powodu przeciążeń;
Trudność w regulacji prędkości obrotowej.
Obecnie silnik synchroniczny znajduje zastosowanie w instalacjach, które nie wymagają kontroli prędkości i częstego rozruchu. Należą do nich duże zespoły wentylatorów, pomp i sprężarek.
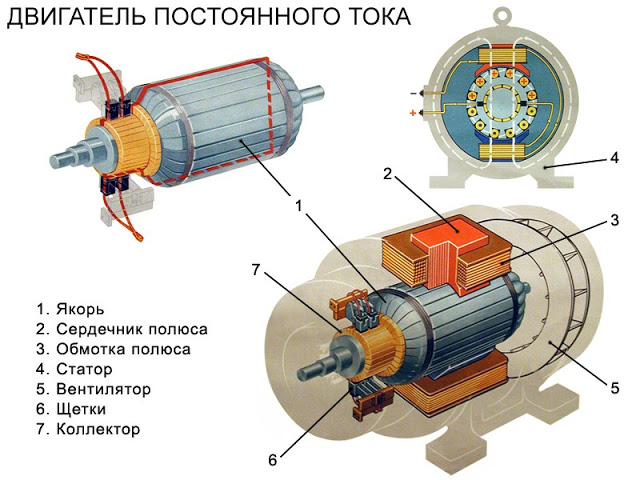
Działanie dowolnego silnika elektrycznego opiera się na zasadzie indukcji elektromagnetycznej. Silnik elektryczny składa się z części stacjonarnej - stojana (w przypadku silników asynchronicznych i synchronicznych prądu przemiennego) lub cewki indukcyjnej (w przypadku silników prądu stałego) oraz części ruchomej - wirnika (w przypadku silników asynchronicznych i synchronicznych prądu przemiennego) lub twornika (w przypadku silników prądu stałego) . Magnesy trwałe są często używane jako cewka indukcyjna w silnikach prądu stałego małej mocy.
Z grubsza wszystkie silniki można podzielić na dwa typy:
Silniki prądu stałego
Silniki prądu przemiennego (asynchroniczne i synchroniczne)
Silniki prądu stałego
Według niektórych opinii silnik ten można nazwać także maszyną synchroniczną prądu stałego z samosynchronizacją. Prosty silnik będący maszyną prądu stałego składa się z: magnes trwały na cewce indukcyjnej (stojanie), 1 elektromagnes z widocznymi biegunami na tworniku (twornik dwubolcowy z widocznymi biegunami i jednym uzwojeniem), zespół szczotko-kolektorowy z 2 płytkami (lamelami) i 2 szczotkami.Prosty silnik ma 2 położenia wirnika (2 „martwe punkty”), z których niemożliwe jest samodzielne uruchomienie, oraz nierówny moment obrotowy. W pierwszym przybliżeniu pole magnetyczne biegunów stojana jest jednolite (jednolite).
Silniki z zespołem szczotko-komutatorowym to:
Kolektor - urządzenie elektryczne, w którym czujnik położenia wirnika i wyłącznik prądu w uzwojeniach to to samo urządzenie - zespół zbieracza szczotek.

Bezszczotkowy- zamknięty układ elektromechaniczny składający się z urządzenia synchronicznego o sinusoidalnym rozkładzie pola magnetycznego w szczelinie, czujnika położenia wirnika, przetwornika współrzędnych i wzmacniacza mocy. Droższa opcja w porównaniu do silników szczotkowych.

Silniki prądu przemiennego
Ze względu na rodzaj pracy silniki te dzielą się na synchroniczne i asynchroniczne. Zasadnicza różnica polega na tym, że w maszynach synchronicznych I harmoniczna siły magnetomotorycznej stojana porusza się wraz z prędkością obrotu wirnika (dlatego sam wirnik obraca się z prędkością obrotu pola magnetycznego w stojanie), natomiast w maszynach asynchronicznych maszyn istnieje i pozostaje różnica pomiędzy prędkością obrotową wirnika a prędkością obrotową pola magnetycznego w stojanie (pole wiruje szybciej niż wirnik).Synchroniczny- silnik prądu przemiennego, którego wirnik obraca się synchronicznie z polem magnetycznym napięcia zasilającego. Silniki te są tradycyjnie używane z ogromną mocą (setki kilowatów i więcej).
Istnieją silniki synchroniczne z dyskretnym ruchem kątowym wirnika - silniki krokowe. W nich to położenie wirnika jest ustalane poprzez zasilanie odpowiednich uzwojeń. Przejście do innego położenia odbywa się poprzez usunięcie napięcia zasilającego z niektórych uzwojeń i przeniesienie go na inne uzwojenia silnika.
Innym typem silnika synchronicznego jest silnik reluktancyjny z przełączaniem, którego zasilanie uzwojeń realizowane jest za pomocą elementów półprzewodnikowych.

Asynchroniczny- silnik prądu przemiennego, w którym prędkość obrotowa wirnika różni się od częstotliwości skrętnego pola magnetycznego wytwarzanego przez napięcie zasilania, drugą nazwą maszyn asynchronicznych jest indukcja, ponieważ prąd w uzwojeniu wirnika jest indukowany przez pole wirujące; stojana. Maszyny asynchroniczne stanowią obecnie ogromną część maszyny elektryczne. Stosowane są głównie w postaci silników elektrycznych i są uważane za kluczowe konwertery energia elektryczna na mechaniczne, najczęściej asynchroniczne, z wirnikiem klatkowym
W zależności od liczby faz silniki są:
- jednofazowe
- dwufazowy
- trójfazowy
Najpopularniejsze i najbardziej poszukiwane silniki stosowane w produkcji i gospodarstwach domowych:
Jednofazowy silnik asynchroniczny klatkowy
Jednofazowy silnik asynchroniczny ma tylko 1 uzwojenie robocze na stojanie, do którego podczas pracy silnika dostarczany jest prąd przemienny. Chociaż do uruchomienia silnika, na jego stojanie znajduje się również uzwojenie pomocnicze, które jest na krótko podłączone do sieci poprzez kondensator lub indukcyjność lub jest zwierane przez styki początkowe przełącznika. Jest to konieczne, aby wytworzyć początkowe przesunięcie fazowe, aby wirnik zaczął się obracać, w przeciwnym razie pulsujące pole magnetyczne stojana nie przesunęłoby wirnika z jego miejsca.
Wirnik takiego silnika, jak każdy inny silnik asynchroniczny z wirnikiem klatkowym jest to rdzeń cylindryczny z rowkami wypełnionymi aluminium, z natychmiast odlanymi łopatkami wentylacyjnymi.
Taki wirnik nazywany jest wirnikiem klatkowym. Silniki jednofazowe stosowane są w urządzeniach małej mocy, m.in. wentylatorach pokojowych czy małych pompach.

Dwufazowy silnik asynchroniczny klatkowy
Dwufazowe silniki asynchroniczne są bardziej wydajne przy zasilaniu z jednofazowej sieci prądu przemiennego. Zawierają one dwa uzwojenia robocze na stojanie, umieszczone prostopadle, przy czym jedno z uzwojeń jest podłączone bezpośrednio do sieci prądu przemiennego, a drugie poprzez kondensator przesuwający fazę, dzięki czemu wychodzi wirujące pole magnetyczne, ale bez kondensatora wirnik nie byłby nie ruszaj się.
Silniki te mają między innymi wirnik klatkowy, a ich zastosowanie jest jeszcze szersze niż silników jednofazowych. Już jest pralki i różne maszyny. Silniki dwufazowe do zasilania z sieci jednofazowych nazywane są silnikami kondensatorowymi, ponieważ często uważa się, że ich istotną częścią jest kondensator przesuwający fazę.

Trójfazowy silnik asynchroniczny klatkowy
Trójfazowy silnik asynchroniczny posiada trzy uzwojenia robocze na stojanie, przesunięte względem siebie w taki sposób, że po podłączeniu do sieci trójfazowej pola magnetyczne okazują się być przesunięte w przestrzeni o 120 stopni względem siebie. Po włączeniu silnika trójfazowego do sieć trójfazowa prądu przemiennego pojawia się wirujące pole magnetyczne, które powoduje ruch wirnika klatkowego.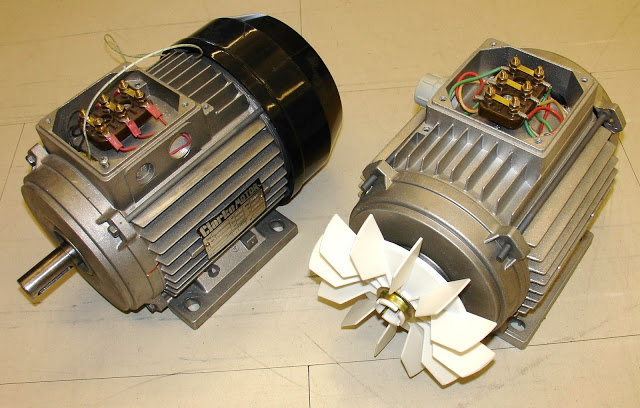
Uzwojenia stojana silnika trójfazowego można połączyć w układ „gwiazda” lub „trójkąt”, natomiast do zasilania silnika w układ „gwiazda” wymagane będzie napięcie wyższe niż w przypadku układu „trójkąt” na silniku, dlatego wskazane są 2 napięcia, na przykład: 127/220 lub 220/380. Silniki trójfazowe są niezbędne do napędzania różnych maszyn, wciągarek, pił tarczowych, dźwigów itp.
Trójfazowy silnik asynchroniczny z uzwojonym wirnikiem
Trójfazowy silnik asynchroniczny z uzwojonym wirnikiem ma stojan podobny do typów silników opisanych powyżej, laminowany obwód magnetyczny z 3 uzwojeniami ułożonymi w jego szczelinach, ale pręty duraluminiowe nie są wlewane do wirnika fazowego, ale prawdziwe już ułożone uzwojenie trójfazowe, w połączeniu w gwiazdę. Końce nawiniętej gwiazdy uzwojenia wirnika wyprowadzone są na trzy pierścienie stykowe zamontowane na wale wirnika i oddzielone od niego elektrycznie.
Za pomocą szczotek do pierścieni doprowadzana jest między innymi energia trójfazowa. napięcie przemienne, a włączenie może odbywać się bezpośrednio lub za pomocą reostatów. Oczywiście silniki z uzwojonym wirnikiem są droższe, chociaż ich moment rozruchowy pod obciążeniem jest znacznie wyższy niż w przypadku silników z wirnikiem klatkowym. Dzieje się tak właśnie w wyniku zwiększonej siły i ogromnego momentu rozruchowego ten typ silniki mają zastosowanie w napędach wind i dźwigów, czyli tam, gdzie urządzenie uruchamia się pod obciążeniem, a nie na biegu jałowym, jak w przypadku silników z wirnikiem klatkowym.