motores electricos corriente continua puede tener excitación independiente, paralela, secuencial o mixta (Fig. 6.1).
Arroz. 6.1. Circuitos de motores eléctricos de CC independientes ( A),
paralelo ( b), secuencial ( V) y mixto ( GRAMO) excitación
(la parte superior del diagrama “c” pertenece al diagrama “a”)
En un motor de excitación en paralelo, el devanado de campo está conectado en paralelo a los terminales del inducido. Pero la corriente que fluye a través de este devanado, a diferencia de la corriente del inducido, no depende de la carga y está determinada por el voltaje aplicado al inducido y la resistencia total del circuito de excitación. Por esta razón, un motor eléctrico con excitación en paralelo también se denomina motor eléctrico con excitación separada.
Esfuerzo de torsión METRO Motor DC y su EMF mi determinado por fórmulas
METRO= a F I I; mi= kФω,
donde k es el coeficiente de diseño del motor;
Ф – flujo magnético, Wb;
I I es la corriente de armadura, A.
ω – velocidad angular, rad/s.
Ecuaciones electromecánicas ω = ƒ ( I i) y mecánico ω = ƒ ( METRO) las características tienen la forma
ω = Ud./(kF) – ( R yo + R p) / (kF) I I;
ω = Ud./(kF) – ( R yo + R p) / (a 2 F 2) METRO.
Ideal de velocidad angular velocidad de ralentí(en I yo = 0 o METRO = 0)
ω 0 = Ud./(kF).
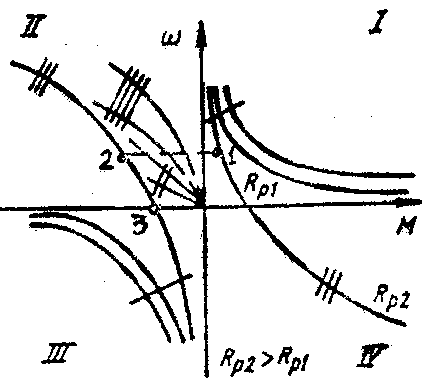
En la figura. 6.2 presenta las características mecánicas de un motor DC con excitación independiente(DPT NV) en todos los modos de funcionamiento. Los puntos característicos de las características en el modo motor son: el punto de ralentí ideal (ω 0, METRO= 0); punto de modo nominal (ω n, METRO norte); punto cortocircuito (ω = 0, METRO = METRO A).
La rigidez de la característica mecánica está determinada por el flujo de excitación y la resistencia del circuito del inducido:
β = re METRO/dω = - a 2 Ф 2 / ( R yo + R pag) = - METRO k/ω.

Arroz. 6.2. Características mecánicas combinadas de un motor DC con excitación independiente.
El valor más alto del módulo de rigidez corresponde a la característica mecánica natural, ya que la corriente de excitación es igual a la nominal y la resistencia de ajuste. R p = 0. A medida que aumenta la resistencia del reóstato R p la pendiente de la característica mecánica aumenta y la velocidad angular disminuye. A un valor de resistencia dado R p y par nominal METRO n velocidad angular del motor
ω n.r = ω 0 (1 – I norte ( R yo + R pag) / Ud. norte.
Para calcular las características mecánicas es necesario conocer la resistencia del inducido del motor. R i, que se especifica en los catálogos. A falta de datos de fábrica, el valor R Lo encuentro aproximadamente usando la fórmula.
R yo = 0,5 (1 – ŋ norte) ( Ud. norte/ I norte).
Dado que las características mecánicas del DPT NV son sencillas, para construirlas basta con tener dos puntos:
1) ω = ω 0 y METRO = 0,
2) ω = ω n (o ω = ω n.r.) y METRO = METRO norte.
Para DPT NV, son posibles los siguientes tres modos de frenado eléctrico.
1. Frenado regenerativo que ocurre cuando la velocidad del motor es mayor que la velocidad de ralentí ideal. Es el más económico, ya que la energía de frenado se transfiere a la red eléctrica. Las características mecánicas en este modo son una continuación de las características correspondientes del modo motor en el cuadrante II. El circuito del motor no cambia durante el frenado regenerativo.
2. Frenado dinámico. La armadura del motor se desconecta de la red y se pone en cortocircuito con la resistencia. En este caso, la energía mecánica de las partes móviles (mecanismo y armadura del motor) se convierte en energía eléctrica, que se pierde en forma de energía térmica en la resistencia del circuito de la armadura. Las características mecánicas en este modo de frenado pasan por el origen de las coordenadas (en la Fig. 6.2, líneas con tres muescas).
3. frenado trasero llevado a cabo de dos maneras:
1) introduciendo una gran resistencia en el circuito de la armadura. En este caso, el par del motor se vuelve menor que el par de carga estática. METRO Con. El motor se detiene (en el punto A) y luego, bajo la influencia del par. METRO c comienza a girar en una dirección diferente, desarrollando un par de frenado; en el punto B se produce un estado estacionario. Las características mecánicas son una continuación de las características correspondientes del modo motor (en la Fig. 6.2, líneas con cuatro muescas);
2) frenado cambiando la polaridad del devanado del inducido a lo largo del camino. Motor funcionando en el punto 1 , después de cambiar cambiará a la característica reostática en el punto 2. A lo largo de la línea 2–3 se produce el frenado (línea con cinco tics). en el punto 3 el motor se detiene y debe desconectarse de la red eléctrica para evitar pasar al modo motor con rotación en sentido contrario.
EN motor CC excitado en seriede-niem La corriente de armadura es también la corriente de excitación. El flujo magnético de excitación aumenta al aumentar la carga, como resultado de lo cual la velocidad angular disminuye según la ecuación (6.1) y las características mecánicas del motor serán suaves (Fig. 6.3). Gracias a esto, el NV DPT supera las sobrecargas con relativa facilidad y fluidez y tiene un alto par de arranque. Estas propiedades del motor permiten que se utilice ampliamente en la conducción de mecanismos de transporte. Las características mecánicas del motor se suavizan significativamente cuando se introduce un reóstato en el circuito del inducido (Fig. 6.3, líneas con una muesca).
Arroz. 6.3. Características mecánicas del motor DC.
con excitación secuencial
Con DPT PV no se puede implementar el modo de frenado regenerativo, ya que no tiene una velocidad de ralentí ideal.
Frenado dinámico Se puede realizar según un esquema con autoexcitación y con excitación independiente. En el primer caso, la armadura y el devanado de campo se desconectan de la red y se cierran a un reóstato. A evitar la desmagnetización de la máquina, es necesario cambiar el devanado de campo (o armadura) para que la dirección de la corriente en el devanado de campo no cambie. En este caso, la máquina se autoexcita para una determinada resistencia del circuito de armadura solo en un cierto valor. velocidad angular; cuando se excita, crea un par de frenado. Las características mecánicas no son lineales (en la Fig. 6.3 hay curvas con cuatro muescas).
Las características mecánicas de un motor en modo de frenado dinámico con excitación independiente son similares a las características correspondientes de un motor con excitación independiente (en la Fig. 6.3, líneas con dos muescas). Encontré este método de frenado. amplia aplicación, y el primer método rara vez se utiliza, principalmente como método de emergencia, por ejemplo, cuando desaparece la tensión de red.
El frenado mediante contraconmutación se realiza, como en DPT NV, de dos formas:
1) inclusión de alta resistencia en el circuito del inducido;
2) cambiar la polaridad del devanado del inducido, dejando sin cambios la dirección de la corriente en el devanado de campo.
Con el primer método, la característica mecánica será una continuación de la característica correspondiente al modo del motor (en la Fig. 6.3 hay una línea con tres muescas). En el segundo método, el frenado se realiza a lo largo de la línea. 1 –2–3 .
Regulación de velocidad de accionamientos eléctricos de CC. La velocidad del DPT NV se puede ajustar:
1) cambiando la resistencia en el circuito del inducido;
2) cambiar el flujo de excitación;
3) cambiar el voltaje suministrado a la armadura.
Regulación según el primer método tiene importantes desventajas:
– la rigidez de las características mecánicas disminuye con la disminución de la velocidad angular y aumentan las pérdidas de potencia en el circuito principal;
– el rango de control es limitado, especialmente con cargas bajas;
– la suavidad y precisión de la regulación son bajas.
Por estos motivos, este método de control rara vez se utiliza en variadores de CC.
Por el segundo método Es posible regular el flujo magnético solo en la dirección de disminución (ya que en el modo nominal el circuito magnético del motor está saturado), lo que corresponde a un aumento de la velocidad por encima de la nominal. El rango posible de control de velocidad no excede 2 para un motor estándar. El límite superior de velocidad está limitado por la resistencia mecánica de los elementos del inducido del motor: las bandas de devanado del inducido y el conmutador.
La principal forma de regular la velocidad de un NV DC es un método basado en cambiar el voltaje suministrado al inducido, que se lleva a cabo mediante un convertidor ajustable especial. Los convertidores de tiristores se utilizan principalmente como fuentes de energía individuales. La rigidez de las características mecánicas del accionamiento en el sistema “convertidor – DPT NV” es casi constante. Las características mecánicas son una familia de líneas rectas paralelas entre sí. El alcance, la suavidad y la precisión de la regulación son aquí mayores que con otros métodos de control. Es por eso este sistema El variador se utiliza para mecanismos que requieren un control de velocidad profundo y suave.
Cálculo de resistencias adicionales en el circuito de armadura de un DPT NV. Si se conocen las características electromecánicas o mecánicas naturales 1 motor (Fig. 6.4) y sus datos de pasaporte, luego calcule la resistencia R d, cuando se incluye en el circuito de armadura, la característica artificial deseada 2 pasará por el punto A con las coordenadas dadas ω y, I y o ω y, M y, se puede realizar utilizando los siguientes métodos más comunes.

Arroz. 6.4. Características de DPT NV para calcular el valor.
resistencias de ajuste
Método de proporción. Anotemos la relación entre las caídas de velocidad y la corriente. I y o momento METRO y sobre el Δω e natural y el Δω artificial deseado y sus características:
Δω mi / Δω u = I Y R I / ( I Y ( R yo + R re)) = R I / ( R yo + R d).
Entonces la cantidad requerida
R re = R i (Δω y / Δω e – 1).
Método de segmento no requiere conocimiento del valor de resistencia del propio motor R I (además, su valor puede estar determinado por una característica natural conocida).
Escribamos la expresión para la velocidad del motor con una característica artificial dada (ver Fig. 6.4) a la corriente nominal. I n, momento METRO n, flujo magnético Fn y voltaje Ud. norte:
ω y = Ud. norte / (kF norte) (1 – I norte R/ Ud. norte),
Dónde Ud. norte / (kF norte) = ω 0 .
ω y = ω 0 (1 – R / R norte).
Aquí R norte = Ud. norte/ I n – la llamada resistencia nominal, que es el valor base para los cálculos, Ohm.
Relación
R / Ud. norte = (ω 0 – ω u) / ω 0 = δ
refleja una propiedad importante del NV DPT: la diferencia de velocidad relativa δ = Δω / ω 0 es igual a la resistencia activa relativa del circuito de armadura R / R norte.
Denotemos en la Fig. 6.4 puntos característicos A, b,Con, d y observe que ω 0 – ω y = Δω = C.A, ω 0 = anuncio. Entonces R = R norte Δω / ω 0 = R norte C.A/anuncio; R re = R norte bCon/anuncio; R yo = R norte Ab /anuncio.
Así, para encontrar R d primero debe determinar las longitudes de los segmentos en función de las características bCon Y anuncio a corriente nominal o par y calcular la resistencia nominal R norte = Ud. norte/ I norte.
El cálculo de resistencias adicionales también se puede realizar utilizando las siguientes fórmulas para una corriente permitida determinada I adicional, que está determinado por el valor del momento permitido METRO condiciones adicionales o de arranque, marcha atrás y frenado.
Resistencia de resistencia R d1 al inicio ( mi = 0)
R d1 = ( Ud. / I adicional) - R I.
Resistencia R d2 resistencia durante el frenado dinámico
R d2 = ( mi / I adicional) - R yo ≈ ( Ud. / I adicional) - R I).
Resistencia de resistencia R d3 durante la marcha atrás o el contrafrenado
R d3 = (( Ud. + mi) / I adicional) - R yo ≈ (2 Ud. / I adicional) - R I.
Ejemplo . DPT NV tipo PBST-53 tiene los siguientes datos de pasaporte: R norte = 4,8 kilovatios; norte norte = 1500 rpm; Ud. norte = 220 V; I n = 24,2 A; R yo = 0,38 ohmios; I v.n = 0,8 A. Se requiere determinar:
1) la resistencia de una resistencia, cuya inclusión en el circuito del inducido del motor asegurará el paso de una característica mecánica artificial a través de un punto de coordenadas ω y = 90 rad/s, METRO n = 25 Nm;
2) la resistencia de las resistencias, cuya inclusión limitará la corriente durante el arranque y el frenado conmutando hacia atrás al nivel I adicional = 3 I norte.
Los motores de CC pueden tener excitación independiente, en paralelo, en serie o mixta (Fig. 6.1).
Arroz. 6.1. Circuitos de motores eléctricos de CC independientes ( A),
paralelo ( b), secuencial ( V) y mixto ( GRAMO) excitación
(la parte superior del diagrama “c” pertenece al diagrama “a”)
En un motor de excitación en paralelo, el devanado de campo está conectado en paralelo a los terminales del inducido. Pero la corriente que fluye a través de este devanado, a diferencia de la corriente del inducido, no depende de la carga y está determinada por el voltaje aplicado al inducido y la resistencia total del circuito de excitación. Por esta razón, un motor eléctrico con excitación en paralelo también se denomina motor eléctrico con excitación separada.
Esfuerzo de torsión METRO Motor DC y su EMF mi determinado por fórmulas
METRO= a F I I; mi= kФω,
donde k es el coeficiente de diseño del motor;
Ф – flujo magnético, Wb;
I I es la corriente de armadura, A.
ω – velocidad angular, rad/s.
Ecuaciones electromecánicas ω = ƒ ( I i) y mecánico ω = ƒ ( METRO) las características tienen la forma
ω = Ud./(kF) – ( R yo + R p) / (kF) I I;
ω = Ud./(kF) – ( R yo + R p) / (a 2 F 2) METRO.
Velocidad angular del ralentí ideal (a I yo = 0 o METRO = 0)
ω 0 = Ud./(kF).
En la figura. 6.2 presenta las características mecánicas de un motor de corriente continua con excitación independiente (DC NV) en todos los modos de operación. Los puntos característicos de las características en el modo motor son: el punto de ralentí ideal (ω 0, METRO= 0); punto de modo nominal (ω n, METRO norte); punto de cortocircuito (ω = 0, METRO = METRO A).
La rigidez de la característica mecánica está determinada por el flujo de excitación y la resistencia del circuito del inducido:
β = re METRO/dω = - a 2 Ф 2 / ( R yo + R pag) = - METRO k/ω.
Arroz. 6.2. Características mecánicas combinadas de un motor DC con excitación independiente.
El valor más alto del módulo de rigidez corresponde a la característica mecánica natural, ya que la corriente de excitación es igual a la nominal y la resistencia de ajuste. R p = 0. A medida que aumenta la resistencia del reóstato R p la pendiente de la característica mecánica aumenta y la velocidad angular disminuye. A un valor de resistencia dado R p y par nominal METRO n velocidad angular del motor
ω n.r = ω 0 (1 – I norte ( R yo + R pag) / Ud. norte.
Para calcular las características mecánicas es necesario conocer la resistencia del inducido del motor. R i, que se especifica en los catálogos. A falta de datos de fábrica, el valor R Lo encuentro aproximadamente usando la fórmula.
R yo = 0,5 (1 – ŋ norte) ( Ud. norte/ I norte).
Dado que las características mecánicas del DPT NV son sencillas, para construirlas basta con tener dos puntos:
1) ω = ω 0 y METRO = 0,
2) ω = ω n (o ω = ω n.r.) y METRO = METRO norte.
Para DPT NV, son posibles los siguientes tres modos de frenado eléctrico.
1. Frenado regenerativo que ocurre cuando la velocidad del motor es mayor que la velocidad de ralentí ideal. Es el más económico, ya que la energía de frenado se transfiere a la red eléctrica. Las características mecánicas en este modo son una continuación de las características correspondientes del modo motor en el cuadrante II. El circuito del motor no cambia durante el frenado regenerativo.
2. Frenado dinámico. La armadura del motor se desconecta de la red y se pone en cortocircuito con la resistencia. En este caso, la energía mecánica de las partes móviles (mecanismo y armadura del motor) se convierte en energía eléctrica, que se pierde en forma de energía térmica en la resistencia del circuito de la armadura. Las características mecánicas en este modo de frenado pasan por el origen de las coordenadas (en la Fig. 6.2, líneas con tres muescas).
3. frenado trasero llevado a cabo de dos maneras:
1) introduciendo una gran resistencia en el circuito de la armadura. En este caso, el par del motor se vuelve menor que el par de carga estática. METRO Con. El motor se detiene (en el punto A) y luego, bajo la influencia del par. METRO c comienza a girar en una dirección diferente, desarrollando un par de frenado; en el punto B se produce un estado estacionario. Las características mecánicas son una continuación de las características correspondientes del modo motor (en la Fig. 6.2, líneas con cuatro muescas);
2) frenado cambiando la polaridad del devanado del inducido a lo largo del camino. Motor funcionando en el punto 1 , después de cambiar cambiará a la característica reostática en el punto 2. A lo largo de la línea 2–3 se produce el frenado (línea con cinco tics). en el punto 3 el motor se detiene y debe desconectarse de la red eléctrica para evitar pasar al modo motor con rotación en sentido contrario.
EN motor CC excitado en seriede-niem La corriente de armadura es también la corriente de excitación. El flujo magnético de excitación aumenta al aumentar la carga, como resultado de lo cual la velocidad angular disminuye según la ecuación (6.1) y las características mecánicas del motor serán suaves (Fig. 6.3). Gracias a esto, el NV DPT supera las sobrecargas con relativa facilidad y suavidad y tiene un par de arranque elevado. Estas propiedades del motor permiten que se utilice ampliamente en la conducción de mecanismos de transporte. Las características mecánicas del motor se suavizan significativamente cuando se introduce un reóstato en el circuito del inducido (Fig. 6.3, líneas con una muesca).
Arroz. 6.3. Características mecánicas del motor DC.
con excitación secuencial
Con DPT PV no se puede implementar el modo de frenado regenerativo, ya que no tiene una velocidad de ralentí ideal.
Frenado dinámico Se puede realizar según un esquema con autoexcitación y con excitación independiente. En el primer caso, la armadura y el devanado de campo se desconectan de la red y se cierran a un reóstato. A evitar la desmagnetización de la máquina, es necesario cambiar el devanado de campo (o armadura) para que la dirección de la corriente en el devanado de campo no cambie. En este caso, la máquina se autoexcita para una determinada resistencia del circuito del inducido sólo con un cierto valor de la velocidad angular; cuando se excita, crea un par de frenado. Las características mecánicas no son lineales (en la Fig. 6.3 hay curvas con cuatro muescas).
Las características mecánicas de un motor en modo de frenado dinámico con excitación independiente son similares a las características correspondientes de un motor con excitación independiente (en la Fig. 6.3, líneas con dos muescas). Este método de frenado se utiliza ampliamente, pero el primer método rara vez se utiliza, principalmente como método de emergencia, por ejemplo, cuando desaparece la tensión de red.
El frenado mediante contraconmutación se realiza, como en DPT NV, de dos formas:
1) inclusión de alta resistencia en el circuito del inducido;
2) cambiar la polaridad del devanado del inducido, dejando sin cambios la dirección de la corriente en el devanado de campo.
Con el primer método, la característica mecánica será una continuación de la característica correspondiente al modo del motor (en la Fig. 6.3 hay una línea con tres muescas). En el segundo método, el frenado se realiza a lo largo de la línea. 1 –2–3 .
Regulación de velocidad de accionamientos eléctricos de CC. La velocidad del DPT NV se puede ajustar:
1) cambiando la resistencia en el circuito del inducido;
2) cambiar el flujo de excitación;
3) cambiar el voltaje suministrado a la armadura.
Regulación según el primer método tiene importantes desventajas:
– la rigidez de las características mecánicas disminuye con la disminución de la velocidad angular y aumentan las pérdidas de potencia en el circuito principal;
– el rango de control es limitado, especialmente con cargas bajas;
– la suavidad y precisión de la regulación son bajas.
Por estos motivos, este método de control rara vez se utiliza en variadores de CC.
Por el segundo método Es posible regular el flujo magnético solo en la dirección de disminución (ya que en el modo nominal el circuito magnético del motor está saturado), lo que corresponde a un aumento de la velocidad por encima de la nominal. El rango posible de control de velocidad no excede 2 para un motor estándar. El límite superior de velocidad está limitado por la resistencia mecánica de los elementos del inducido del motor: las bandas de devanado del inducido y el conmutador.
La principal forma de regular la velocidad de un NV DC es un método basado en cambiar el voltaje suministrado al inducido, que se lleva a cabo mediante un convertidor ajustable especial. Los convertidores de tiristores se utilizan principalmente como fuentes de energía individuales. La rigidez de las características mecánicas del accionamiento en el sistema “convertidor – DPT NV” es casi constante. Las características mecánicas son una familia de líneas rectas paralelas entre sí. El alcance, la suavidad y la precisión de la regulación son aquí mayores que con otros métodos de control. Por lo tanto, este sistema de accionamiento se utiliza para mecanismos que requieren un control de velocidad profundo y suave.
Cálculo de resistencias adicionales en el circuito de armadura de un DPT NV. Si se conocen las características electromecánicas o mecánicas naturales 1 motor (Fig. 6.4) y sus datos de pasaporte, luego calcule la resistencia R d, cuando se incluye en el circuito de armadura, la característica artificial deseada 2 pasará por el punto A con las coordenadas dadas ω y, I y o ω y, M y, se puede realizar utilizando los siguientes métodos más comunes.
Arroz. 6.4. Características de DPT NV para calcular el valor.
resistencias de ajuste
Método de proporción. Anotemos la relación entre las caídas de velocidad y la corriente. I y o momento METRO y sobre el Δω e natural y el Δω artificial deseado y sus características:
Δω mi / Δω u = I Y R I / ( I Y ( R yo + R re)) = R I / ( R yo + R d).
Entonces la cantidad requerida
R re = R i (Δω y / Δω e – 1).
Método de segmento no requiere conocimiento del valor de resistencia del propio motor R I (además, su valor puede estar determinado por una característica natural conocida).
Escribamos la expresión para la velocidad del motor con una característica artificial dada (ver Fig. 6.4) a la corriente nominal. I n, momento METRO n, flujo magnético Fn y voltaje Ud. norte:
ω y = Ud. norte / (kF norte) (1 – I norte R/ Ud. norte),
Dónde Ud. norte / (kF norte) = ω 0 .
ω y = ω 0 (1 – R / R norte).
Aquí R norte = Ud. norte/ I n – la llamada resistencia nominal, que es el valor base para los cálculos, Ohm.
Relación
R / Ud. norte = (ω 0 – ω u) / ω 0 = δ
refleja una propiedad importante del NV DPT: la diferencia de velocidad relativa δ = Δω / ω 0 es igual a la resistencia activa relativa del circuito de armadura R / R norte.
Denotemos en la Fig. 6.4 puntos característicos A, b,Con, d y observe que ω 0 – ω y = Δω = C.A, ω 0 = anuncio. Entonces R = R norte Δω / ω 0 = R norte C.A/anuncio; R re = R norte bCon/anuncio; R yo = R norte Ab /anuncio.
Así, para encontrar R d primero debe determinar las longitudes de los segmentos en función de las características bCon Y anuncio a corriente nominal o par y calcular la resistencia nominal R norte = Ud. norte/ I norte.
El cálculo de resistencias adicionales también se puede realizar utilizando las siguientes fórmulas para una corriente permitida determinada I adicional, que está determinado por el valor del momento permitido METRO condiciones adicionales o de arranque, marcha atrás y frenado.
Resistencia de resistencia R d1 al inicio ( mi = 0)
R d1 = ( Ud. / I adicional) - R I.
Resistencia R d2 resistencia durante el frenado dinámico
R d2 = ( mi / I adicional) - R yo ≈ ( Ud. / I adicional) - R I).
Resistencia de resistencia R d3 durante la marcha atrás o el contrafrenado
R d3 = (( Ud. + mi) / I adicional) - R yo ≈ (2 Ud. / I adicional) - R I.
Ejemplo . DPT NV tipo PBST-53 tiene los siguientes datos de pasaporte: R norte = 4,8 kilovatios; norte norte = 1500 rpm; Ud. norte = 220 V; I n = 24,2 A; R yo = 0,38 ohmios; I v.n = 0,8 A. Se requiere determinar:
1) la resistencia de una resistencia, cuya inclusión en el circuito del inducido del motor asegurará el paso de una característica mecánica artificial a través de un punto de coordenadas ω y = 90 rad/s, METRO n = 25 Nm;
2) la resistencia de las resistencias, cuya inclusión limitará la corriente durante el arranque y el frenado conmutando hacia atrás al nivel I adicional = 3 I norte.
Ministerio de Educación y Ciencia Federación Rusa
Institución educativa estatal de educación profesional superior Yuzhno-Uralsky universidad estatal
Sucursal en Zlatoust
motores de corriente continua
ZD-431.583.270102
Completado por: Sharipova Yu.R.
Grupo: ZD-431
Comprobado por: Rumyantsev.E.
1. Introducción
2. Diseño y principio de funcionamiento de motores CC.
3. Arrancar motores
4. Datos técnicos de los motores.
5. Eficiencia de los motores DC
6 características del motor CC
6.1 Características de rendimiento
6.2 Características mecánicas
7. Lista de referencias utilizadas
1.Introducción
maquinas electricas La fuente de alimentación de CC se utiliza ampliamente en diversas industrias.
La importante difusión de los motores eléctricos de CC se explica por sus valiosas cualidades: altos pares de arranque, frenado y sobrecarga, velocidad relativamente alta, lo cual es importante al dar marcha atrás y frenar, y la capacidad de controlar amplia y suavemente la velocidad de rotación.
Los motores eléctricos de CC se utilizan para accionamientos ajustables, por ejemplo, para accionar diversas máquinas herramienta y mecanismos. La potencia de estos motores eléctricos alcanza los cientos de kilovatios. En relación con la automatización del control. procesos de producción y mecanismos amplía el ámbito de aplicación de los motores CC de baja potencia uso general potencia desde unidades hasta cientos de vatios.
Dependiendo del circuito de alimentación, los devanados de excitación de una máquina de CC se dividen en varios tipos (con excitación independiente, en paralelo, en serie y mixta).
La producción anual de máquinas DC en la Federación de Rusia es significativamente menor que la producción de máquinas. C.A., lo que se debe al alto coste de los motores de CC.
Al principio se crearon máquinas de corriente continua. Posteriormente fueron sustituidas en gran medida por máquinas de corriente alterna. Gracias a la capacidad de regular de forma suave y económica la velocidad de rotación, los motores de CC conservan su papel dominante en el transporte, para accionar máquinas metalúrgicas, en grúas y mecanismos de elevación. En los sistemas de automatización, las máquinas de CC se utilizan ampliamente como motores de actuador, motores para accionar mecanismos de grabación automática de cintas, como tacogeneradores y amplificadores de máquinas eléctricas.
2. Diseño y principio de funcionamiento de motores DC.
La estructura de las máquinas de CC (generadores y motores) se muestra de forma simplificada en la Fig. 1. Los 2 polos principales y los 4 polos adicionales están unidos a la carcasa de acero 1 del estator de la máquina. En los polos principales hay un devanado de excitación 3, en los polos adicionales hay un devanado de polos adicionales 5. El devanado de excitación crea el flujo magnético F de la máquina.
Fig.1
Al eje del motor 10 se fija un circuito magnético cilíndrico, en cuyas ranuras se encuentra el devanado del inducido 7. Se unen secciones del devanado del inducido al conmutador 9. Las escobillas fijas 8 también están presionadas contra él mediante resortes. fijado al eje del motor consta de varias placas de cobre Utilizando un conmutador y escobillas, el devanado del inducido se conecta al exterior. circuito electrico. En los motores, también sirven para convertir la corriente del circuito externo, de dirección constante, en una corriente de dirección variable en los conductores del devanado del inducido.
Los polos adicionales con un devanado ubicado en ellos reducen las chispas entre las escobillas y el conmutador de la máquina. El devanado de polos adicionales está conectado en serie con el devanado del inducido y en diagramas electricos a menudo no se representa.
Para reducir las pérdidas de energía, el circuito magnético de la armadura está hecho de separado láminas de acero. Todos los devanados están hechos de alambre aislado. Además de los motores con dos polos principales, existen máquinas de corriente continua con cuatro o más polos principales. Al mismo tiempo, aumenta correspondientemente el número de varillas y juegos de cepillos adicionales.
Si el motor está enchufado voltaje CC, luego tras la interacción campo magnético, creado por el devanado de excitación y la corriente en los conductores de la armadura, aparece un par que actúa sobre la armadura:
![]() (1)
(1)
donde K M es un coeficiente que depende de parámetros de diseño coches; F - flujo magnético de un polo; Yo yo - corriente de armadura.
Si el par del motor en n = 0 excede el par de frenado con el que está cargado el motor, entonces la armadura comenzará a girar. A medida que aumenta la velocidad de rotación n, aumenta la fem inducida en la armadura. Esto conduce a una disminución de la corriente de armadura:
![]() (3)
(3)
donde r I es la resistencia de la armadura.
La consecuencia de la disminución de la corriente I I es una disminución del par motor. Cuando los pares del motor y de la carga son iguales, la velocidad de rotación deja de cambiar.
La dirección del par del motor y, por tanto, la dirección de rotación del inducido depende de la dirección del flujo magnético y de la corriente en los conductores del devanado del inducido. Para cambiar la dirección de rotación del motor, debe cambiar la dirección de la corriente del inducido o de la corriente de campo.
3. Arrancar motores
De la fórmula (3) se deduce que en el primer instante después de encender el motor en una red de voltaje CC, es decir cuando y
Dado que la resistencia r I es pequeña, la corriente del inducido puede ser 10...30 veces mayor que la corriente nominal del motor, lo cual es inaceptable, ya que provocará fuertes chispas y destrucción del conmutador. Además, con tal corriente, se produce un par motor inaceptablemente alto y, con arranques frecuentes, es posible un sobrecalentamiento del devanado del inducido.
Para reducir la corriente de arranque en el circuito del inducido, se incluye una resistencia de arranque, cuya resistencia se reduce a cero a medida que aumenta la velocidad del motor. Si el arranque del motor está automatizado, entonces la resistencia de arranque consta de varias etapas, que se apagan secuencialmente a medida que aumenta la velocidad de rotación.
Corriente de arranque de armadura
![]()
A medida que el motor acelera, la EMF en el devanado del inducido aumenta y, como se desprende de la fórmula (3), esto conduce a una disminución en la corriente del inducido I R. Por lo tanto, a medida que aumenta la velocidad del motor, la resistencia en el circuito del inducido disminuye. De modo que con un tamaño relativamente pequeño corriente de arranque Para obtener un par de arranque elevado, el motor se arranca con el flujo magnético más alto. En consecuencia, la corriente de excitación en el arranque debe ser la máxima permitida, es decir nominal.
4.Datos técnicos de los motores.
El pasaporte del motor y la literatura de referencia para motores de CC contienen los siguientes datos técnicos: tensión nominal U y, potencia P n, velocidad de rotación n n, corriente I n, eficiencia.
Por U n nominal nos referimos a la tensión para la que están diseñados el devanado del inducido y el colector, así como, en la mayoría de los casos, el devanado de campo paralelo. Teniendo en cuenta la tensión nominal, se seleccionan los materiales aislantes eléctricos del motor.
Corriente nominal En n – máximo corriente permitida(consumido de la red), en el que el motor se calienta a su punto más alto temperatura permitida, trabajando en el modo (largo plazo, intermitente, corto plazo) para el que está diseñado:
![]()
donde I yang es la corriente del inducido con carga nominal; I vn – corriente del devanado de excitación a tensión nominal.
Cabe señalar que la corriente de excitación Ivn del motor de excitación en paralelo es relativamente pequeña, por lo que, con carga nominal, generalmente se toma
La potencia nominal P n es la potencia desarrollada por el motor en el eje cuando funciona con carga nominal (par) y a velocidad nominal n n.
La velocidad de rotación n n y la eficiencia corresponden al funcionamiento del motor con corriente In, voltaje U n sin resistencias adicionales en los circuitos del motor.
EN caso general La potencia del eje P 2, el par M y la velocidad de rotación n están relacionados por la relación:
La potencia P 1 consumida por el motor de la red, los valores P 2, eficiencia, U, I están relacionados por las relaciones:
Evidentemente, estas relaciones también son válidas para el modo de funcionamiento nominal del motor.
5. Eficiencia del motor corriente continua
Coeficiente acción útil Es el indicador más importante de los motores de CC. Cuanto mayor es, menor es la potencia P y la corriente I consumida por el motor de la red al mismo tiempo. poder mecanico. EN vista general La dependencia es:
![]() (9)
(9)
¿Dónde está la pérdida en el devanado del inducido?
- pérdidas en el devanado de excitación;
Los motores están diseñados de tal manera que el valor máximo de eficiencia se encuentre en una región cercana a la potencia nominal. El funcionamiento de motores con cargas bajas no es deseable debido a los pequeños valores de r i. Valores de eficiencia del motor con de varias maneras La excitación y la potencia de 1 a 100 kW con carga nominal son diferentes y tienen un promedio de 0,8.
6.Características de los motores DC.
6.1. Características de rendimiento
Los trabajadores se llaman ajuste, velocidad, par y eficiencia. características.
Característica reguladora
La característica de control representa la dependencia de la velocidad de rotación P de la corriente de excitación Ib en el caso en que la corriente de armadura Ia y la tensión de red U permanecen sin cambios, es decir, n=f(Iv) con Ia=const y U=const.
Mientras el acero del accionamiento magnético de la máquina no esté saturado, el flujo Ф cambia en proporción a la corriente de excitación Iв. En este caso, la característica de control es hiperbólica. A medida que se satura con corrientes altas Iv, la característica se acerca a lineal (Fig. 2). Con valores bajos de corriente Iv, la velocidad de rotación aumenta bruscamente. Por lo tanto, cuando se rompe el circuito de excitación de un motor excitado en paralelo (Iv = 0), su velocidad de rotación alcanza límites inaceptables, como dicen: "El motor está funcionando salvajemente". Una excepción pueden ser los micromotores, que tienen un par de ralentí M0 relativamente grande.

Arroz. 2. Características de control del motor.
en motores excitación secuencial Iв = Iа. Con cargas bajas, la corriente del inducido Ia es pequeña y la velocidad de rotación puede ser demasiado alta, por lo que arrancar y operar con cargas bajas es inaceptable. Los micromotores son así. en el caso anterior, podrá constituir una excepción.
Características de velocidad.
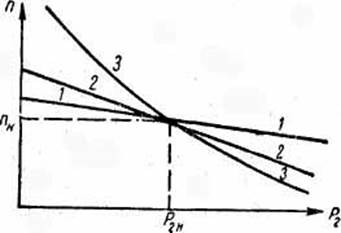
Las características de velocidad dan la dependencia de la velocidad de rotación n de poder útil P2 en el eje del motor si la tensión U de la red y la resistencia rv del reóstato de ajuste del circuito de excitación permanecen sin cambios, es decir n=f(P2), con U=const y rv = const.
Arroz. 3. Características de velocidad
A medida que aumenta la corriente del inducido y aumenta la carga mecánica del motor de excitación en paralelo, al mismo tiempo aumenta la caída de tensión en el inducido y aparece una reacción del inducido, que normalmente actúa de forma desmagnetizante. La primera razón tiende a reducir la velocidad de rotación del motor, la segunda, a aumentarla. El efecto de la caída de tensión en el inducido suele tener un efecto mayor. Por lo tanto, la característica de velocidad del motor de excitación en paralelo tiene un carácter ligeramente descendente (curva 1, Fig. 3).
En un motor bobinado en serie, la corriente del inducido es la corriente de excitación. Como resultado, la característica de velocidad de un motor con excitación secuencial tiene un carácter cercano a hiperbólico. A medida que aumenta la carga y el circuito magnético se satura, la característica se vuelve más lineal (curva 3 en la Fig. 3).
En un motor compuesto, cuando los devanados se encienden en consecuencia, la característica de velocidad ocupa una posición intermedia entre las características de un motor de excitación en paralelo y en serie (curva 2).
Características del momento.
Las características del par muestran cómo el par M cambia con un cambio en la potencia útil P2 en el eje del motor, si el voltaje de la red U y la resistencia rv del reóstato de ajuste en el circuito de excitación permanecen sin cambios, es decir, M = f(P2), con U = constante, rv = constante.
Par útil en el eje del motor.
Si la velocidad de rotación del motor de excitación paralela no cambiara con la carga, entonces la dependencia del par Mmech de la potencia útil se representaría gráficamente mediante una línea recta que pasa por el origen de coordenadas. En realidad, la velocidad de rotación disminuye al aumentar la carga. Por tanto, la característica del par útil se inclina ligeramente hacia arriba (curva 2, Fig. 4). Al mismo tiempo, la curva momento electromagnético M pasa por encima de la curva de par útil Mmech en una cantidad constante igual al par de ralentí M0 (curva 1).

Arroz. 4. Características del momento
En un motor excitado en serie, el tipo de característica de par se aproxima a la parabólica, ya que el cambio de par a partir de la corriente de carga se produce, según la ley parabólica, hasta que el acero se satura. A medida que se produce la saturación, la dependencia se vuelve más lineal (curva 4). En un motor compuesto, la característica de par (curva 3) ocupa una posición intermedia entre las características de un motor de excitación en paralelo y en serie.
Características de los cambios en la eficiencia.
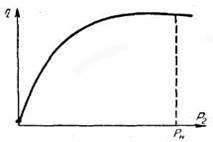
La curva de eficiencia versus carga tiene una forma característica para todos los motores (Fig. 5). La curva pasa por el origen y aumenta rápidamente a medida que la potencia útil aumenta hasta 1/4 de la potencia nominal. Con una potencia P2 igual a aproximadamente 2/3 de la potencia nominal, el rendimiento suele alcanzar su valor máximo. A medida que la carga aumenta hasta el valor nominal, la eficiencia permanece constante o cae ligeramente.
Arroz. 5. Cambiar la eficiencia del motor.
6.2 Características mecánicas
La característica más importante El motor es mecánico n(M). Muestra cómo la velocidad del motor depende del par desarrollado. Si los devanados del motor están conectados voltajes nominales y no hay resistencias adicionales en sus circuitos, entonces el motor tiene una característica mecánica llamada natural. En la característica natural hay un punto correspondiente a los datos nominales del motor (M n, P i, etc.). Si el voltaje en el devanado del inducido es menor que el voltaje nominal, o I en< I вн, то двигатель будет иметь различные искусственные механические характеристики. На этих характеристиках двигатель работает при пуске, торможении, реверсе и регулировании частоты вращения.
Transformando la expresión (3) con respecto a la velocidad de rotación, obtenemos la ecuación de la característica electromecánica n(I i):
![]() (7)
(7)
Después de reemplazar la corriente I i en la ecuación (7) según la fórmula (1), obtenemos la ecuación para la característica mecánica n(M):
![]() (8)
(8)
Cuando Ф = constante, las características electromecánicas n(I i) y mecánicas n(M) del motor de excitación en paralelo son líneas rectas. Dado que el flujo magnético cambia ligeramente debido a la reacción del inducido, las características son en realidad algo diferentes de las rectas.
Al ralentí (M = 0), el motor tiene un régimen de ralentí determinado por el primer término de la ecuación (8). A medida que aumenta la carga, n disminuye. Como se desprende de la ecuación (8), esto se explica por la presencia de una resistencia de armadura r.
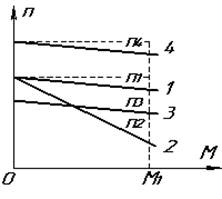
Dado que r i no es grande, la velocidad de rotación del motor cambia poco al aumentar el par y el motor tiene una característica mecánica natural rígida (Fig. 6, característica 1).
De la ecuación (8) se deduce que la velocidad de rotación se puede ajustar con una carga constante dada (M = const) de tres maneras:
a) un cambio en la resistencia del circuito del inducido;
b) cambiar el flujo magnético del motor;
c) cambiar el voltaje en los terminales del inducido.
Arroz. 6 características mecánicas
Regular la velocidad de rotación de la primera forma en el circuito del inducido. Se debe incluir una resistencia adicional r d. Luego, la resistencia en la ecuación (8) debe reemplazarse por r i + r d.
Como se desprende de la ecuación (8), la velocidad de rotación n está relacionada con la resistencia del circuito del inducido r i + r d con una carga constante (M = const) mediante una dependencia lineal, es decir A medida que aumenta la resistencia, la velocidad de rotación disminuye. Diferentes resistencias rd corresponden a varias características mecánicas artificiales, una de las cuales se muestra en la Fig. 2 (característica 2). Utilizando la característica 2, para un par M1 dado, se puede obtener la velocidad de rotación n2.
El cambio de la velocidad de rotación de la segunda forma se realiza utilizando una fuente de voltaje ajustable UD2. Al cambiar su voltaje con el regulador R2, se puede cambiar la corriente de excitación I V y, por tanto, el flujo magnético del motor. Como puede verse en la ecuación (8), con una carga constante (M = const), la velocidad de rotación tiene una dependencia compleja del flujo magnético F. El análisis de la ecuación (8) muestra que en un cierto rango de cambios en la fuerza magnética flujo F, una disminución de este último conduce a un aumento de la velocidad de rotación. Es este rango de variación del flujo el que se utiliza al regular la velocidad de rotación.
Cada valor de flujo magnético corresponde a una característica mecánica artificial del motor, una de las cuales se muestra en la Fig. 2 (característica 4). Utilizando la característica 4 al par M1, se puede obtener la velocidad de rotación n4.
Para regular la velocidad de rotación cambiando el voltaje en los terminales del inducido, es necesario tener una fuente de voltaje ajustable relativamente potente. Cada valor de voltaje corresponde a una característica mecánica artificial del motor, una de las cuales se muestra en Fig.2(característica 3). Usando la característica 3 a un par M1 dado, se puede obtener la velocidad de rotación n3.
Lista de literatura usada
1. Katsman M.M. Máquinas eléctricas. -M.: Más alto. escuela, 1993.
2. Kopylov I.P. Máquinas eléctricas. -M.: Energoatomizdat, 1986