Многие потребители подшипников считают магнитные подшипники своеобразным "черным ящиком", хотя в промышленности их применяют довольно долго. Обычно они используются при транспортировке или подготовке природного газа, в процессах его сжижения и так далее. Часто они используются плавучими газоперерабатывающими комплексами.
Магнитные подшипники функционируют за счет магнитной левитации. Они работают благодаря силам, образующимся за счет магнитного поля. При этом поверхности между собой не контактируют, поэтому отсутствует необходимость в смазке. Данный тип подшипников способен функционировать даже в довольно жестких условиях, а именно при криогенных температурах, экстремальных показателях давления, высоких скоростях и так далее. При этом магнитные подшипники показывают высокую надежность.
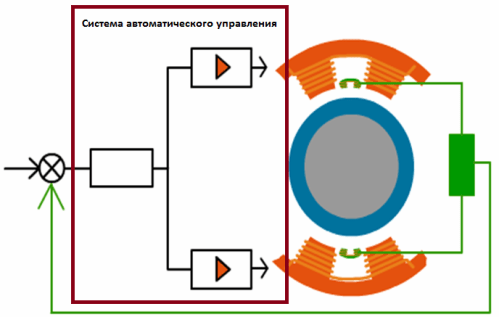
Ротор радиального подшипника, который оснащен ферромагнитными пластинами, с помощью магнитных полей, создаваемых, размещенными на статоре электромагнитами, удерживается в нужной позиции. Функционирование осевых подшипников основано на таких же принципах. При этом напротив электромагнитов на роторе, находится диск, который установлен перпендикулярно к оси вращения. Позицию ротора отслеживают индукционные датчики. Данные датчики быстро определяют все отклонения от номинальной позиции, в результате чего создают сигналы, управляющие токами в магнитах. Данные манипуляции позволяют удерживать ротор в нужном положении.
Преимущества магнитных подшипников неоспоримы : они не требуют смазки, не угрожают окружающей среде, потребляют мало энергии и благодаря отсутствию соприкасающихся и трущихся частей работают продолжительное время. Кроме того магнитные подшипники обладают низким уровнем вибраций. Сегодня существуют модели со встроенной системой мониторинга и контроля состояния. На данный момент магнитные подшипники в основном применяются в турбокомпрессорах и компрессорах для природного газа, водорода и воздуха, в криогенной технике, в рефрижераторных установках, в турбодетандерах, в вакуумной технике, в электрогенераторах, в контрольном и измерительном оборудовании, в высокоскоростных полировальных, фрезерных и шлифовальных станках.
Главный недостаток магнитных подшипников - зависимость от магнитных полей. Исчезновение поля может привести к катастрофической поломке системы, поэтому зачастую их используют со страховочными подшипниками. Обычно в качестве них используют подшипники качения, способные выдержать два или один отказ магнитных моделей, после этого требуется их незамедлительная замена. Также для магнитных подшипников применяют громоздкие и сложные системы управления, значительно затрудняющие эксплуатацию и ремонт подшипника. К примеру, для управления данными подшипниками зачастую устанавливают специальный шкаф управления. Данный шкаф является контроллером, взаимодействующим с магнитными подшипниками. С его помощью на электромагниты подается ток, регулирующий положение ротора, гарантирующий его бесконтактное вращение и поддерживающий его стабильное положение. Кроме того, во время эксплуатации магнитных подшипников может возникать проблема нагревания обмотки данной детали, которая происходит за счет прохождения тока. Поэтому с некоторыми магнитными подшипниками иногда устанавливают дополнительные охлаждающие системы.
Один из крупнейших производителей магнитных подшипников - компания S2M, которая участвовала в разработке полного жизненного цикла магнитных подшипников, а также двигателей с постоянными магнитами: начиная с разработки и заканчивая вводом в эксплуатацию, производством и практическими решениями. Компания S2M всегда старалась придерживаться инновационной политики, направленной на упрощение конструкции подшипников, необходимой для снижения затрат. Она старалась сделать магнитные модели более доступными для более широкого использования рынком промышленных потребителей. С фирмой S2M сотрудничали компании, изготавливающие различные компрессоры и вакуумные насосы в основном для нефтегазовой отрасли. В свое время сеть сервисов S2M раскинулась по всему миру. Ее офисы имелись в России, Китае, Канаде и Японии. В 2007 фирму S2M приобрела группа SKF за пятьдесят пять миллионов евро. Сегодня магнитные подшипники по их технологиям изготавливаются производственным подразделением A&MC Magnetic Systems.
Компактные и экономичные модульные системы, оборудованные магнитными подшипниками, используются в промышленности все шире. По сравнению с привычными традиционными технологиями они обладают множеством преимуществ. Благодаря миниатюризованным инновационным системам «двигатель / подшипник» стала возможна интеграция таких систем в современную серийную продукцию. Они сегодня используются в высокотехнологичных отраслях (производство полупроводников). Последние изобретения и разработки в области магнитных подшипников четко направлены на максимальное конструкционное упрощение данного изделия. Это нужно для снижения затрат на подшипники, что сделает их более доступными для использования широким рынком промышленных потребителей, которые несомненно нуждаются в такой инновации.
В разнообразной современной электромеханической продукции и технических изделиях, магнитный подшипник является основным узлом, который определяет технические и экономические характеристики и увеличивает безотказный эксплуатационный период. По сравнению с традиционными подшипниками, в магнитных подшипниках полностью отсутствует сила трения между неподвижными и подвижными деталями. Наличие такого свойства позволяет реализовывать повышенные скорости в конструкциях магнитных систем. Магнитные подшипники изготавливаются из высокотемпературных сверхпроводящих материалов, которые рационально влияют на их свойства. К таким свойствам можно отнести существенное снижение затрат на модельные конструкции систем охлаждения и такой важный параметр, как длительное поддержание магнитного подшипника в рабочем состоянии.
Принцип работы магнитных подвесов
Принцип работы магнитных подвесов основан на применении свободной левитации
, которая создается магнитными и электрическими полями. Вращающий вал с применением таких подвесов, без применения физического контакта, в прямом смысле подвешен в мощном магнитном поле. Относительные обороты его проходят без трения и износа, при этом достигается высочайшая надежность. Основополагающей составляющей магнитного подвеса является магнитная система. Ее основное предназначение – это создание магнитного поля необходимой формы, обеспечение требуемых тяговых характеристик в рабочей области при контрольном определенном смещении ротора и жесткости самого подшипника. Такие параметры магнитных подшипников находятся в прямой зависимости от конструкции магнитной системы, которую необходимо разрабатывать и рассчитывать исходя из ее массогабаритной
составляющей – дорогостоящей системы криогенного охлаждения. На что способны электромагнитное поле магнитных подвесов наглядно можно увидеть на работе детской игрушки Левитрон
. На практике магнитные и электрические подвесы существуют в девяти видах, отличающихся между собой принципом действия:
- магнитные и гидродинамические подвесы;
- подвесы, работающие на постоянных магнитах;
- активные магнитные подшипники;
- кондиционные подвесы;
- LC- резонансные виды подвесов;
- индукционные подшипники;
- диамагнитные типы подвесов;
- сверхпроводящие подшипники;
- электростатические подвесы.
Если протестировать все эти типы подвесов по популярности, то в нынешних реалиях, заняли лидирующие позиции активные магнитные подшипники (АМП
). По виду они представляют собой мехатронную систему устройства, в которой стабильное состояние ротора, осуществляется присутствующими силами магнитного притяжения. Эти силы воздействуют на ротор с боку электромагнитов, электрический ток в которых настраивается системой автоматического управления на сигналах датчиков электронного блока управления. В таких блоках управления может применяться как традиционная аналоговая, так и более инновационная система цифровой обработки сигналов. Активные магнитные подшипники имеют великолепные динамические характеристики, надежность и высокий КПД. Уникальные возможности активных магнитных подшипников способствуют их повсеместному внедрению. АМП
эффективно применяются, к примеру, в таком оборудовании:
- газотурбинные установки;
- скоростные роторные системы;
- электродвигатели;
- турбодетандеры;
- накопители инерционной энергии и т.д.
Пока активные магнитные подшипники требуют внешнего источника тока и дорогостоящей и сложной аппаратуры управления. На данный момент разработчики АМП
проводят активные работы по созданию пассивного вида магнитных подшипников.
Говоря о магнитных подшипниках или бесконтактных подвесах, нельзя не отметить их замечательные качества: не нужна смазка, отсутствуют трущиеся части, следовательно нет потерь на трение, крайне низкий уровень вибрации, высокая относительная скорость, малое энергопотребление, система автоматического контроля и мониторинга состояния подшипников, возможность герметизации.
Все эти достоинства делают магнитные подшипники лучшими решениями для множества применений: для газовых турбин, для криогенной техники, в высокооборотных электрогенераторах, для вакуумных устройств, для различных станков и прочего оборудования, в том числе высокоточного и высокоскоростного (порядка 100000 оборотов в минуту), где важно отсутствие механических потерь, помех и погрешностей.
Принципиально магнитные подшипники подразделяются на два типа: пассивные и активные магнитные подшипники. Пассивные магнитные подшипники изготавливаются , но такой подход далеко не идеален, поэтому используется он крайне редко. Более гибкие и широкие технические возможности открываются с подшипниками активными, в которых магнитное поле создается переменными токами в обмотках сердечников.
Как работает бесконтактный магнитный подшипник
Работа активного магнитного подвеса или подшипника базируется на принципе электромагнитной левитации - левитации с использованием электрического и магнитного полей. Здесь вращение вала в подшипнике происходит без физического контакта поверхностей друг с другом. Именно по этой причине полностью исключается смазка, а механический износ тем не менее отсутствует. Так повышаются надежность и КПД машин.
Специалисты также отмечают важность наличия контроля положения вала ротора. Система датчиков непрерывно следит за положением вала и подает сигналы системе автоматического управления для точного позиционирования путем корректировки позиционирующего магнитного поля статора, - сила притяжения с нужной стороны вала делается сильнее или слабее путем регулировки тока в статорных обмотках активных подшипников.

Два конических активных подшипника либо два радиальных и один осевой активные подшипники - позволяют бесконтактно подвесить ротор буквально в воздухе. Система управления подвесом работает непрерывно, она может быть цифровой или аналоговой. Так обеспечивается высокая прочность удержания, высокая грузоподъемность, и регулируемые жесткость и амортизация. Данная технология позволяет подшипникам работать в условиях низких и высоких температур, в вакууме, на больших скоростях и в условиях повышенных требований к стерильности.
Из вышеизложенного ясно, что основными частями системы активного магнитного подвеса являются: магнитный подшипник и автоматическая система электронного управления. Электромагниты все время действуют на ротор с разных сторон, и действие их подчинено электронной системе контроля.

Ротор радиального магнитного подшипника оснащен ферромагнитными пластинами, на которые и действует удерживающее магнитное поле от катушек статора, в результате чего ротор оказывается подвешен в центре статора, не соприкасаясь с ним. Индуктивные датчики все время следят за положением ротора. Любое отклонение от правильного положения приводит к появлению сигнала, который подается на контроллер, чтобы тот в свою очередь вернул ротор в нужное положение. Радиальный зазор может составлять от 0,5 до 1 мм.
Аналогичным образом функционирует упорный магнитный подшипник. Электромагниты в форме кольца закреплены на валу упорного диска. Электромагниты располагаются на статоре. На концах вала располагаются осевые датчики.
Для надежного удержания ротора машины во время ее остановки или в момент отказа системы удержания, используются страховочные шариковые подшипники, которые закреплены так, что зазор между ними и валом выставлен равным половине того, что имеет место в магнитном подшипнике.
Система автоматического регулирования располагается в шкафу, и отвечает за правильную модуляцию тока, проходящего по электромагнитам, в соответствии с сигналами от датчиков положения ротора. Мощность усилителей связана с максимальной силой электромагнитов, величиной воздушного зазора и временем реакции системы на изменение положения ротора.
Возможности бесконтактных магнитных подшипников
Максимально возможная скорость вращения ротора в радиальном магнитном подшипнике ограничена лишь способностью ферромагнитных пластин ротора сопротивляться центробежной силе. Обычно предел окружной скорости составляет 200 м/с, в то время как для осевых магнитных подшипников предел ограничен стойкостью литой стали упора - 350 м/с с обычными материалами.
От применяемых ферромагнетиков зависит и максимальная нагрузка, которую способен выдержать подшипник соответствующего диаметра и длины статора подшипника. Для стандартных материалов максимальное давление - 0,9 Н/см2, что меньше чем у обычных контактных подшипников, однако проигрыш в нагрузке может быть компенсирован высокой окружной скоростью при увеличенном диаметре вала.
Энергопотребление активного магнитного подшипника не очень велико. Наибольшие потери в подшипнике приходятся на вихревые токи, но это в десятки раз меньше чем та энергия, которая растрачивается при использовании в машинах обычных подшипников. Муфты, термоизоляционные барьеры и другие устройства исключаются, подшипники эффективно работают в условиях вакуума, гелия, кислорода, морской воды и т. д. Диапазон температур составляет от -253°С до +450°С.
Относительные недостатки магнитных подшипников
Между тем, есть у магнитных подшипников и недостатки.
В первую очередь - необходимость применять вспомогательные страховочные подшипники качения, которые выдерживают максимум два отказа, после чего их нужно менять на новые.
Во-вторых, сложность системы автоматического управления, которая при выходе из строя потребует сложного ремонта.
В-третьих, температура обмотки статора подшипника при высоких токах повышается - обмотки греются, и им нужно персональное охлаждение, лучше если жидкостное.
Наконец, материалоемкость бесконтактного подшипника оказывается высокой, потому что площадь несущей поверхности для поддержания достаточной магнитной силы должна быть обширной - сердечник статора подшипника получается большим и тяжелым. Плюс явление магнитного насыщения.

Но, несмотря на кажущиеся недостатки, магнитные подшипники уже достаточно широко применяются, в том числе в оптических системах высокой точности и в лазерных установках. Так или иначе, начиная с середины прошлого века магнитные подшипники все время совершенствуются.
насмотревшись видео отдельных товарищей, типа таких
решил и я отметится в этой теме. на мой взгляд видео довольно безграмотное, так что вполне можно по-свистеть из партера.
перебрав в голове кучу схем, посмотрев принцип подвеса в центральной части в видео Белецкого, поняв как работает игрушка "левитрнон", пришел к простой схеме. понятно, что опорных шипа должно быть два на одной оси, сам шип выполнен из стали, а кольца жестко на оси зафиксированны. вместо цельных колец вполне можно уложить не очень большие магниты в форме призмы или цилиндра расположенные по окружности. принцип такойже как в известной игрушке "ливитрон". только вместо героскопического момента, который не дает волчку опрокинутся мы используем "распор" между жестко закрепленными на оси подставками.
ниже видео с игрушкой "ливитрон"
а здесь схема которую предлагаю я. по сути это и есть игрушка на видео выше, но как я уже говорил, ей необходимо что-то что не довало бы опорному шипу опрокинутся. в видео выше используется гироскопический момент, я использую две подставки и распор между ними.
попробуем обосновать работу это конструкции, как я её вижу:
магниты отатлкиваются, значит слабое место - нужно стабилизировать эти шипы по оси. здесь я использовал такую идею: магнит пытается вытолкнуть шип в зону с наименьшей напряженностью поля, т.к. шип имеет противоположную кольцу намагниченость и сам магнит кольцевой, где в достаточно большой области, расположенной вдоль оси, напряженность меньше чем на переферии. т.е. распределение напряженности магнитного поля по-форме напомянает стакан - в стенке напряженность максимальна, а на оси минимальна.
шип должен стабилизироваться по оси, с одновременным выталкиванием из кольцевого магнита в зону с наименьшей напряженностью поля. т.е. если таких шипа два на одной оси и кольцевые магниты жестко зафиксированны - ось должна "зависнуть".
получается, что находится в зоне с меньшей напряженностью поля наиболее энергетически выгодно.
порывшись еще в интернете нашел похожую конструкцию:

здесь тоже формируется зона с меньшей напряженностью, находится она тоже по оси между магнитами, так же используется угол. в общем идеалогия очень похожая, однако если говрить о компактном подшипнике - вариант выше выглядит лучше, однако требует магнитов специальной формы. т.е. разница между схемами в том, что я выдавливаю в зону с меньшей напряженностью опорную часть, а в схеме выше само формирование такой зоны обеспечивает положение на оси.
для наглядности сравнения я перерисовал свою схему:
по сути они зеркальны. вообще идея не нова - все они крутятся вокруг одного и того же, у меня даже есть подозрения, что автор ролика выше просто не искакал предполагаемых решений
здесь практически один в один, если конические упоры сделать не цельным, а составными - магнитопровод + кольцевой магнит, то получится моя схема. я бы даже сказал начальная неоптимизированная идея - рисунок ниже. только рисунок выше работает на "притяжение" ротора, а я изначально планировал "отталкивание"
для особо одаренных хочу заметить, данный подвес не нарушает теоремы (запрет) Ирншоу. дело в том что речь идет здесь не о чисто магнитном подвесе, без жесткой фиксации центров на оси т.е. одна ось жестко зафиксирована, ничего работать не будет. т.е. речь идет о выборе точки опоры и не более того.
на всамом деле, если посмотреть видео Белецкого, то там видно, что примерно такая конфигурация полей уже используется где не поподя, не хватает только финального штриха. конический магнитопровод распределяет "отталкивание" по двум осям, третью же ось Ирншоу велел зафиксировать иначе, я не стал спорить и жестко её зафиксировал механически. почему Белецкий не попробывал такой вариант я не знаю. фактически ему нужно два "ливитрона" - подставки зафиксировать на оси, а на волчки соединить медной трубкой.
еще можно заметить, что можно использовать наконечники из любого дастаточно сильного диамегнетика в место магнита полярности противоположной магнитному опорному кольцу. т.е. заменить связку магнит+конический магнитопровод, просто на конус из диамагнетика. фиксация на оси будет более надежной, но диамагнетики не отличаются сильным взаимодействием и нужны большие напряженности поля и большой "объем" этого поля, чтобы применять это хоть как-то. за счет того что поле аксильно равномерное относительно оси вращения, изменения магнитного поля происходить при вращении не будет т.е. подобный подшипник не создаёт противодействия вращению.
по логике вещей такой принцип должен быть применим и для подвески плазмы - пропатченная "магнитная бутылка" (пробкотрон), что же поживем - увидем.
почему я так уверен в результате? ну потому что его не может не быть:) единственно что возможно придется сделать магнитопроводы в форме конуса и чашки для более "жесткой" конфигурации поля.
ну и такжк можно найти видео с подобным подвесом:
здесь автор не использует каких-либо магнитопроводов и использует упор на иглу, как в общем-то и нужно, понимая теорему Ирншоу. но ведь кольца уже жестко закреплены на оси, значит можно распереть ось между ними, чего лего добится используя конические магнитопроводы на магнитах на оси. т.е. пока не пробили "дно" "магнитного стакана" магнитопровод все труднее впихнуть в кольцо т.к. магнитная проницаемость воздуха меньше чем магнитопровода - уменьшение воздушной прослойки приведет к возрастанию напряженности поля. т.е. одна ось жестко закреплена механически - тогда опор на иглу будет не нужен. т.е. см. самый первый рисунок.
P.S.
вот чего нашел. из сери дурная голова рукам покая не дает - автор тот еще белецкий - накручено там мама не горюй - конфигурация поля довольно сложная, более того не однородная по оси вращения т.е. при вращении буде изменение пока магнитной индукции в оси со всеми вытикающими... обратите внимание на шарик в кольцевом магните, с другой же стороны в кольцевом магните цилиндр. т.е. человек тупо испохабил принцип подвеса описанный здесь.
ну или пропаичил подвес на фотографии т.е. перцы на фото используют опор на иглу, а он в место иглы повесил шарик - ай шайтан - сработало - кто бы мог подумать (помню мне доказывали что я не правильно понимаю теорему Ирншоу), однако ума повесить два шарика и использовать всего два кольца видимо не хватает. т.е. количество магнитов в устройстве на видео можно легко сократить до 4-х, а возможно до 3-х т.е. конфигурацию с цилиндром в одном кольце и шариком в другом можно считать экспериментально доказаной работающей см. рисунок изначальной идеи. там я использовал два симитричных упора и цилинд + конус, хотя считаю что конус что часть сферы от полюса до диаметра работают одинакого.
стало быть сам упор выглядит так - это магнитопровод (т.е железный, никелевый и т.п.)в него просто
закладывается магнит-кольцо. ответнаая часть такая же, только наоборот:) и работают два упора в распоре- товарищ Ирншоу запретил рабоать по одному упору.
Ирншоу запретил рабоать по одному упору.