Po količini navora asinhroni motor Velik vpliv ima fazni zamik med tokom I 2 in e. d.s. E 2S rotor.
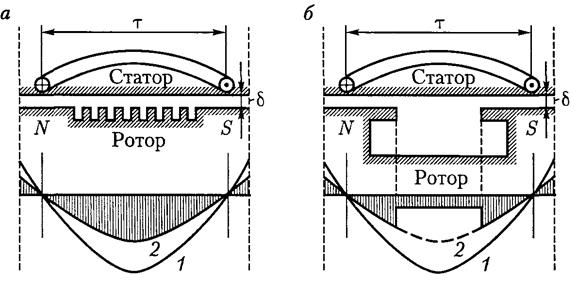
Razmislimo o primeru, ko je induktivnost navitja rotorja majhna in zato lahko fazni premik zanemarimo (sl. 223, a).
Vrtljivo magnetno polje statorja je tukaj nadomeščeno s poljem polov N in S, ki se vrtita, predpostavimo, v smeri urinega kazalca. Uporaba pravila desna roka, določite smer e. d.s. in tokov v navitju rotorja. Tokovi rotorja v interakciji z vrtljivim magnetnim poljem ustvarjajo navor. Smeri sil, ki delujejo na vodnike s tokom, so določene s pravilom leve roke. Kot je razvidno iz risbe, se bo rotor pod vplivom sil vrtel v isti smeri kot vrtilno polje samo, to je v smeri urinega kazalca.
Razmislimo o drugem primeru, ko je induktivnost navitja rotorja velika. V tem primeru je fazni premik med tokom rotorja I 2 in e. d.s. velik bo tudi rotor E 2S. Na sl. 223, b, je magnetno polje statorja asinhronega motorja še vedno prikazano v obliki polov N in S, ki se vrtijo v smeri urinega kazalca. d.s. ostane enak kot na sl. 223, a, vendar zaradi faznega zamika toka, os magnetno polje Rotor ne bo več sovpadal z nevtralno silnico statorja, ampak se bo premaknil pod določenim kotom proti vrtenju magnetnega polja. To bo pripeljalo do dejstva, da bodo nekateri vodniki skupaj z navorom, usmerjenim v eno smer, ustvarili nasprotni navor.
Iz tega je razvidno, da je skupni navor motorja s faznim zamikom med tokom in e. d.s. rotor je manjši kot v primeru, ko sta I 2 in E 2S v fazi. Dokaže se lahko, da navor asinhronskega motorja določa le aktivna komponenta toka rotorja, to je tok I 2 cos in da ga je mogoče izračunati po formuli:
Ф m - magnetni pretok statorja (in tudi približno enak nastalemu magnetnemu pretoku asinhronega motorja);
Kot faznega premika med e. d.s. in fazni tok navitja
C je konstanten koeficient.
Po zamenjavi:
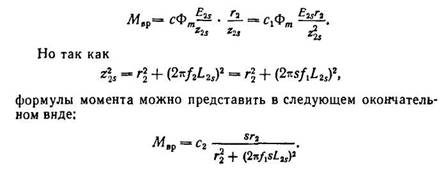
Iz zadnjega izraza je razvidno, da je navor asinhronskega motorja odvisen od zdrsa.
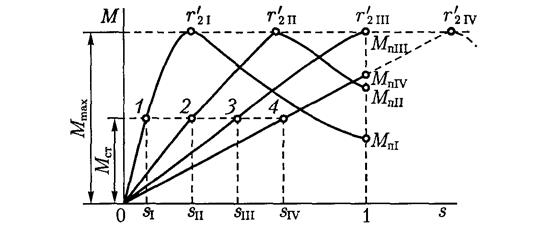
Na sl. 224 prikazuje krivuljo A odvisnosti navora motorja od zdrsa. Iz krivulje je razvidno, da je v trenutku zagona, ko je s=l in n = 0, navor motorja majhen. To je razloženo z dejstvom, da je v trenutku zagona frekvenca toka v navitju rotorja najvišja in induktivna reaktanca navitja visoka. Posledično ima cos majhno vrednost (by
|
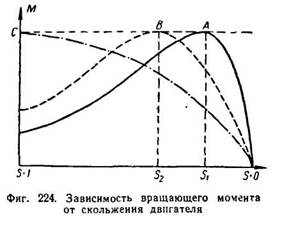
vrstica 0,1-0,2). Zato kljub veliki velikosti začetni tok, bo začetni navor majhen.
Pri nekem zdrsu S 1 bo imel navor motorja največjo vrednost. Z nadaljnjim zmanjševanjem zdrsa ali, drugače povedano, z nadaljnjim povečevanjem števila vrtljajev motorja se bo njegov navor hitro zmanjšal.
Pri drsenju s = 0 bo tudi vrtilni moment motorja enak nič.
Upoštevati je treba, da asinhroni motor praktično ne more imeti ničelnega zdrsa. To je mogoče le, če je rotor opremljen z zunanjim navorom v smeri vrtenja statorskega polja.
Začetni navor se lahko poveča, če se v trenutku zagona zmanjša fazni zamik med tokom in e. d.s. rotor. Iz formule
Vidimo lahko, da če se s konstantnim induktivnim uporom navitja rotorja poveča aktivni upor, se bo sam kot zmanjšal, kar bo privedlo do dejstva, da se bo navor motorja povečal. To se v praksi uporablja za povečanje zagonskega momenta motorja. V trenutku zagona se v tokokrog rotorja vnese aktivni upor (zagonski reostat), ki se nato odstrani, takoj ko motor poveča število vrtljajev.
Povečanje začetnega navora vodi do dejstva, da se največji navor motorja doseže z večjim zdrsom (točka S 2 krivulje B na sliki 224). S povečanjem aktivnega upora kroga rotorja ob zagonu je mogoče zagotoviti, da bo največji navor v trenutku zagona (s = 1 krivulja C).
Navor asinhronega motorja je sorazmeren s kvadratom napetosti, zato tudi majhno zmanjšanje napetosti spremlja močno zmanjšanje navora.
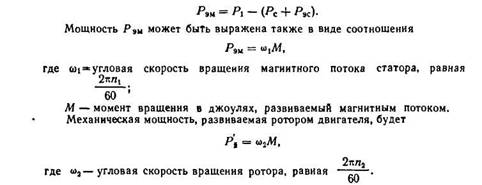
Moč P 1, dovedena v navitje statorja asinhronega motorja, je enaka:
![]()
kjer je m 1 število faz.
Stator motorja ima naslednje izgube energije:
1) v statorskem navitju R es. =m 1 I 1 2 r 1 ;
2) v statorskem jeklu obstaja histereza in vrtinčni tokovi Р C .
Moč, ki se dovaja rotorju, je moč rotirajočega magnetnega polja, imenovana tudi elektromagnetna moč P eM.
Elektromagnetna moč je enaka razliki med močjo, ki se dovaja motorju, in izgubami v statorju motorja, tj.
|
Razlika med R eM in predstavlja električne izgube v navitju rotorja Р eP, če zanemarimo izgube v jeklu rotorja zaradi njihove nepomembnosti (frekvenca obrata magnetizacije rotorja je običajno zelo majhna):
Zato so izgube v navitju rotorja sorazmerne z zdrsom rotorja.
Če iz mehanska moč ki jih razvije rotor, odštejte mehanske izgube P mx, ki jih povzročajo trenje v ležajih rotorja, trenje z zrakom itd., kot tudi dodatne izgube P D, ki nastanejo pod obremenitvijo in jih povzročajo razpršena polja rotorja, ter izgube, ki jih povzročajo: pulzacije magnetnega polja v statorskih zobcih in rotorju, bo ostal uporabna moč na gredi motorja, ki ga označimo s P 2.
Učinkovitost asinhronega motorja je mogoče določiti s formulo:

Iz zadnjega izraza je razvidno, da je vrtilni moment asinhronega motorja sorazmeren zmnožku vrednosti vrtilnega magnetnega pretoka, toka rotorja in kosinusa kota med e. d.s. rotor in njegov tok,

Iz ekvivalentnega vezja asinhronega motorja dobimo vrednost reduciranega rotorskega toka, ki ga podajamo brez dokaza.
Navor, ki ga razvije motor, je enak elektromagnetni moči, deljeni s sinhrono hitrostjo vrtenja električnega pogona.
M = P em /ω 0
Elektromagnetna moč je moč, ki se prenaša skozi zračno režo od statorja do rotorja in je enaka izgubam v rotorju, ki jih določa formula:
P em = m I 2 2 (r 2 '/s)
m – število faz.
M = M em = (Pm/ω 0) (I 2 ') 2 (r 2 '/s)
Elektromehanska značilnost asinhronega motorja je odvisnost I2’ od zdrsa. Ker pa asinhronski stroj deluje le kot elektromotor, je glavna značilnost mehanska.
M = Me m = (Pm/ω 0) (I 2 ') 2 (r 2 '/s) - poenostavljen izraz mehanske karakteristike.
Če v ta izraz nadomestimo trenutno vrednost, dobimo: M = / [ω 0 [(r 1 + r 2 '/s) 2 + (x 1 + x 2 ') 2 ]]
Namesto ω 0 je treba zamenjati mehansko hitrost, zaradi česar se zmanjša število parov polov.
M = / [ω 0 [(r 1 + r 2 '/s) 2 + (x 1 + x 2 ') 2 ]] je enačba za mehanske značilnosti asinhronskega motorja.
Ko asinhroni motor preide v generatorski način, hitrost vrtenja ω > ω 0 in zdrs postane negativen (s Ko se zdrs spremeni od 0 do +∞, se način imenuje "način elektromagnetne zavore".
Če določimo vrednosti zdrsa od o do +∞, dobimo značilnost:
Celotne mehanske lastnosti asinhronskega motorja.
Kot je razvidno iz mehanskih karakteristik, ima dva ekstrema: enega v intervalu spremembe zdrsa v območju od 0 do +∞, drugega v intervalu od 0 do -∞. dM/ds=0
M max = / ] + se nanaša na motorni način. – se nanaša na generatorski način.
M max =M cr M cr – kritični trenutek.
Zdrs, pri katerem moment doseže svoj maksimum, imenujemo kritični zdrs in ga določa formula: s cr = ±
Kritični zdrs ima enak pomen v motornem in generatorskem načinu.
Vrednost Mcr lahko dobite tako, da vrednost kritičnega zdrsa nadomestite s formulo za navor.
Drsni moment, ki je enak 1, se imenuje začetni navor. Izraz za začetni navor lahko dobite tako, da 1 nadomestite s formulo:
M p = / [ω 0 [(r 1 + r 2 ’) 2 + (x 1 + x 2 ’) 2 ]]
Ker je imenovalec v formuli največjega momenta za več velikostnih redov večji od U f, je splošno sprejeto, da je M cr ≡U f 2.
Kritični zdrs je odvisen od vrednosti aktivnega upora navitja rotorja R 2 '. Začetni navor, kot je razvidno iz formule, je odvisen od aktivnega upora rotorja r 2 '. Ta lastnost zagonskega navora se uporablja pri asinhronih motorjih z navitim rotorjem, pri katerih se zagonski navor poveča z vnosom aktivnega upora v tokokrog rotorja.
7. Transformator v prostem teku
Način število vrtljajev v prostem teku transformator je način delovanja, ko se eno od navitij transformatorja napaja iz vira z izmenično napetostjo in z odprtimi tokokrogi drugih navitij. Pravi transformator ima lahko ta način delovanja, ko je priključen na omrežje in breme, ki se napaja iz njegovega sekundarnega navitja, še ni vklopljeno. Tok I 0 teče skozi primarno navitje transformatorja, hkrati pa v sekundarnem navitju ni toka, ker je njegov krog odprt. Tok I 0, ki poteka skozi primarno navitje, ustvari sinusno spremenljiv pladenj F 0 v magnetnem vezju, ki zaradi magnetnih izgub zaostaja v fazi s tokom za izgubni kot δ. 
![]()
Grafično izražena odvisnost elektromagnetnega navora od zdrsa se imenuje mehanske lastnosti asinhroni motor (slika 3.3).
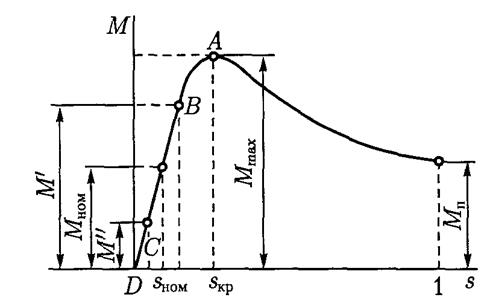
riž. 3.3. Mehanske lastnosti asinhronskega motorja
Poenostavljeno formulo za izračun elektromagnetnega navora asinhronega motorja (Klossova formula) lahko uporabimo za konstruiranje mehanske karakteristike
V tem primeru je kritični zdrs določen s formulo
![]()
kjer je λ m = M max / M nom - preobremenitvena zmogljivost motorja.
Pri izračunu mehanskih značilnosti je treba upoštevati, da se pri vrednostih zdrsa, ki presegajo kritično vrednost, natančnost izračunov močno zmanjša. To je razloženo s spremembo parametrov ekvivalentnega vezja asinhronega motorja, ki ga povzroča magnetna nasičenost zob statorja in rotorja ter povečanje frekvence toka v navitju rotorja.
Oblika mehanskih značilnosti asinhronega motorja je v veliki meri odvisna od napetosti, ki se uporablja za navitje statorja U 1 (slika 3.4) in aktivni upor navitja rotorja r" 2 (slika 3.5).
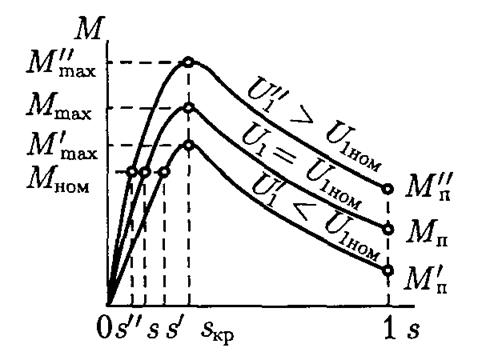
riž. 3.4. Učinek napetosti U 1 o mehanskih lastnostih asinhronskega motorja
Podatki v katalogih za asinhrone motorje običajno ne vsebujejo podatkov o parametrih nadomestnega vezja, kar otežuje uporabo formul za izračun elektromagnetnega navora. Zato se za izračun elektromagnetnega navora pogosto uporablja formula
riž. 3.5. Vpliv odpornosti r" 2 o mehanskih lastnostih asinhronskega motorja
Delovne lastnosti asinhronega motorja določajo njegove delovne značilnosti: odvisnost hitrosti vrtenja n 2, navor na gredi M 2, učinkovitost in faktor moči cosφ 1 od tovora motorja R 2 .
Pri izračunu parametrov za določitev značilnosti delovanja a sinhroni motorji Uporabljajo bodisi grafično metodo, ki temelji na izdelavi tortnega grafikona, bodisi analitično metodo.
Osnova za izvedbo katere koli metode izračuna zmogljivosti so rezultati poskusov brez obremenitve in kratkega stika. Če se motor načrtuje, se ti podatki pridobijo med njegovim izračunom.
Pri izračunu uporov upora r dodatek, ki se uporablja v tokokrogih statorja ali navitega rotorja za omejevanje zagonskega toka ali nadzor hitrosti vrtenja, uporabite načelo: za ta določen asinhronski motor zdrs s sorazmeren z aktivnim uporom rotorskega tokokroga tega motorja. V skladu s tem je enakost resnična
(r 2 + r ext) /s= r 2 /s ime,
kje r 2- aktivni upor samega navitja rotorja pri delovni temperaturi; s- drsenje, ko je upor uveden v tokokrog rotorja z uporom r ext.
Iz tega izraza dobimo formulo za izračun aktivnega upora dodatnega upora g do 6, potrebnega za pridobitev danega povečanega zdrsa s pri določeni (nazivni) obremenitvi:
r ext = r 2 (s/s št. - 1).
Obstajata dve metodi za izračun začetnih reostatov: grafični in analitični.
Grafična metoda natančnejši, vendar zahteva konstrukcijo naravne mehanske karakteristike in zagonskega diagrama motorja, kar je povezano z veliko količino grafičnega dela.
Analitična metoda izračun začetnih reostatov je preprostejši, vendar manj natančen. To je posledica dejstva, da metoda temelji na predpostavki, da je delovni odsek naravne mehanske karakteristike asinhronega motorja raven. Ko pa je drsenje blizu kritičnega, ta predpostavka povzroči opazno napako, ki je tem pomembnejša, čim bližje je začetni začetni trenutek M 1 do največjega navora M m ah. Zato je metoda analitičnega izračuna uporabna samo za vrednosti začetnega zagonskega navora M 1 < 0,7· M m ah .
Upornost upora na stopnjah začetnega reostata:
tretji r ext3 = r 2 (λ m - 1);
drugo r ext2 = r ext3 λ m;
prvi r ext1 = r ext2 λ m,
kje r 2 - aktivni upor faznega navitja rotorja asinhronega motorja,
kje E 2 in jaz 2nom - kataloški podatki za izbrano velikost motorja.
Odpornost zagonskega reostata na njegovih stopnjah:
prvi R PR1 = r ext1 + r ext2 + r ext3;
drugi R PR2 = r ext2 + r ext3
tretji R PR2 = r ext3.
Za omejitev zagonskega toka asinhronih motorjev z kletkasti rotor posebna vezja za njihovo vključitev se uporabljajo z elementi, ki omejujejo začetni tok. Vse te metode temeljijo na zmanjšanju napetosti, ki se napaja v navitje statorja. Večina aplikacij sprejeta vezja z vključitvijo uporov ali dušilk v linearne žice statorja (glej sliko 3.14, b Izračun potrebne upornosti teh elementov za dano zmanjšanje zagonskega toka a glede na njegovo naravno vrednost se izvede po formulah:
za upore z aktivnim uporom
R n = 
za dušilke
X L= 
Impedanca motor v načinu kratkega stika Z k, Ohm,
Z k =U 1 /jaz n
Tukaj X do in r k - induktivne in aktivne komponente tega upora
R k = Z k cosφ k ; x k =
Zmanjšanje umetnega zagonskega navora ob vklopu R oz L bo
α m = α 2 i
Tabela 3.1
Če je torej podana vrednost α m, ki določa vrednost umetnega zagonskega momenta M" p, potem za izračun ustreznih vrednosti R p oz x L lahko uporabite zgornje formule tako, da namesto α 2 zamenjate vanje i, vrednost α m.
Električni upor Navitja motorja, navedena v katalogih, običajno ustrezajo temperaturi +20 °C. Toda pri izračunu značilnosti in parametrov motorjev je treba upornost njihovih navitij pripeljati do delovne temperature. V skladu z veljavnim standardom se delovna temperatura vzame glede na razred toplotne odpornosti električna izolacija uporabljeno v motorju: pri razredu toplotne odpornosti B je delovna temperatura 75 °C, pri razredih toplotne odpornosti F in H pa 115 °C. Pretvorba upora navitja v delovno temperaturo se izvede tako, da se upor navitja pri temperaturi 20 °C pomnoži s koeficientom ogrevanja k t:
r= r 20k t.
Vrednosti tega koeficienta se vzamejo glede na namen motorjev in njihove dimenzije (višina osi vrtenja) (tabela 3.1).
SINHRONI STROJI
OSNOVNI POJMI
Značilna lastnost sinhronih strojev je toga povezava med hitrostjo rotorja n 1 in frekvenco AC v navitju statorja f 1:
n 1 = f 1 60/ r.
Z drugimi besedami, vrtljivo magnetno polje statorja in rotorja sinhronskega stroja se vrtita sinhrono, torej z enako frekvenco.
Sinhroni stroji se po zasnovi delijo na izbočnopolne in neizrazitopolne. Pri sinhronskih strojih z izstopajočim polovom ima rotor izstopajoče pole, na katerih se navijajo tuljave, ki jih napaja DC. Značilnost takšnih strojev je razlika v magnetnem uporu vzdolž vzdolžne osi (vzdolž osi polov) in vzdolž prečne osi (vzdolž osi, ki poteka v medpolarnem prostoru). Magnetni upor proti statorskemu toku vzdolž vzdolžne osi dd veliko manjši magnetni upor na statorski tok vzdolž prečne osi qq. Pri sinhronskih strojih brez izrazitih polov so magnetni upori vzdolž vzdolžne in prečne osi enaki, saj je zračna reža teh strojev okoli oboda statorja enaka.
Zasnova statorja sinhronskega stroja se načeloma ne razlikuje od statorja asinhronega stroja. V navitju statorja se med delovanjem stroja inducira EMF in tečejo tokovi, ki ustvarjajo magnetno gibalno silo (MF), katere največja vrednost je
F 1 =0,45m 1 jaz 1 w 1 k rev1 / r
Ta MMF ustvarja vrtljivo magnetno polje in v zračni reži δ Stroj ustvarja magnetno indukcijo, katere porazdelitveni graf znotraj posameznega pola t je odvisen od zasnove rotorja (slika 4.1).
Za sinhronski stroj z izrazitim polom velja napetostna enačba:
Ú 1 =Ė 0 + Ė 1 d + Ė 1 q + Ė σ1 – İ 1 r 1
kje Ė 0 - glavni EMF sinhronskega stroja, sorazmeren z glavnim magnetnim tokom sinhronskega stroja F 0 ; Ė 1 d - EMF reakcije armature sinhronskega stroja vzdolž vzdolžne osi, sorazmeren z MMF reakcije armature vzdolž vzdolžne osi F 1d; Ė σ1 - EMF reakcije armature vzdolž prečne osi, sorazmeren z MMF reakcije armature vzdolž prečne osi F 1 q ; Ė σ1 - EMF uhajanja zaradi prisotnosti magnetnega toka uhajanja F 0, je velikost tega EMF sorazmerna z induktivno upornostjo puščanja statorskega navitja X 1
Ė σ1 = jİ 1 r
İ 1 r 1 - aktivni padec napetosti v faznem navitju statorja; običajno se ta vrednost zanemarja pri reševanju težav zaradi majhne vrednosti.
riž. 4.1. Grafi porazdelitve magnetne indukcije vzdolž prečne osi
nevidni pol ( A) in izstopajoči pol ( b) sinhroni stroji:
1 - urnik MDS; 2 - graf magnetnega pretoka
Za sinhronski stroj z nevidnim polovom ima napetostna enačba obliko
Ú 1 =Ė 0 + Ė c – İ 1 r 1
Tukaj
Ė c = Ė 1 + Ė σ1
kje Ė 1 - EMF reakcija armature nepoločnega sinhronskega stroja. Enačbe napetosti, obravnavane zgoraj, ustrezajo vektorskim diagramom napetosti. Te diagrame je treba sestaviti za določitev glavne elektromagnetne sile stroja E 0 ali napetost navitja statorja U 1. Upoštevati je treba, da napetostne enačbe in ustrezni vektorski diagrami ne upoštevajo magnetne nasičenosti magnetnega vezja sinhronskega stroja, ki, kot je znano, vpliva na vrednost induktivnih reaktanc, zaradi česar se zmanjšanje. Upoštevanje te nasičenosti je težka naloga, zato pri izračunu EMF in napetosti sinhronskih strojev običajno uporabljajo praktični diagram EMF, ki upošteva stanje nasičenosti magnetnega sistema, ki ga povzroči delovanje reakcije armature, ko je sinhronski stroj obremenjen. Pri izdelavi praktičnega diagrama EMF se sila magnetiziranja reakcije armature ne razgradi na vzdolžne in prečne komponente, zato se ta diagram lahko uporablja tako pri izračunih strojev z izrazitim polovom kot tudi pri ne-polu.
Pri reševanju problemov, povezanih bodisi s sinhronimi generatorji, povezanimi vzporedno z omrežjem, bodisi s sinhronimi motorji, uporabljajo kotne značilnosti sinhroni stroji, ki predstavljajo odvisnost elektromagnetnega navora M na kot obremenitve θ. Ne smemo pozabiti, da v sinhronih strojih z izrazitim polom delujeta dve točki: glavna M osnovni in reaktivni M p, in v strojih z nevidnimi polji - samo glavna točka:
![]()
Obremenitveni kot θ nom ustreza nazivnemu navoru M nom. Največji navor sinhronskega stroja določa preobremenitveno sposobnost sinhronskega stroja, ki je pomembna tako za sinhrone generatorje, ki delujejo vzporedno z omrežjem, kot za sinhrone motorje. Pri sinhronskih strojih z nevidnim polovom največji navor ustreza obremenitvenemu kotu θ = 90°, pri strojih z izrazitim polovom θ cr< 90° и обычно составляет 60 - 80° в зависимости от соотношения основного и реактивного elektromagnetni momenti ta avto.
Za izračun kritičnega kota obremenitve, ki določa preobremenitveno zmogljivost sinhronskih strojev z izrazitim polovom, lahko uporabite izraz.