3-3. ELEKTROMOTORJI S KRATKIM STIKOM SE VRAČAJO NA POL
Največ je asinhroni elektromotor s kratkostičnim obratom na polu preprost tip samozagonski enofazni elektromotor. Njegova naprava je prikazana na sl. 3-5. Stator v obliki podkve je sestavljen iz žigosanih listov 4 električnega jekla.
Listi so med seboj izolirani s filmom laka, da se prepreči močno segrevanje statorja zaradi izmeničnega magnetnega toka, ki povzroča videz vrtinčni tokovi v jedru elektromotorja. Stator ima samo eno tuljavo 1, vendar je bipolarna. Razdalja med poloma je enaka širini tuljave, tako da jo lahko strojno navijemo neposredno na izolirano jedro statorja. Zavoji tuljave so od jedra izolirani s tulcem 3 in dvema prirobnicama 2 iz elektrokartona. Za namestitev prirobnic na jedro so reže 14.
Polna imata vtisnjeni dve luknji, v kateri sta vstavljena zaprta zavoja. bakrena žica 5, ki pokriva približno eno tretjino polnega loka. V prostorih med poloma je rotor prekrit z magnetnimi šanti, ki so jeklene plošče 6, vstavljene v utore polov.
Rotor je sestavljen iz listov P in ima v sredini luknjo za gred 13. Bakrene palice 8 se poganjajo v utore, ki se nahajajo po obodu rotorja, ki so spajkani na konce rotorja. bakreni obroči 7. Običajno rotorji s kletko izveden z utori, poševno za približno en zobni del.
Rotor se vrti v dveh ležajih, ki sta medeninasti puši 10, stisnjeni med plošče 11. Sferična površina puš omogoča njihovo namestitev vzdolž osi gredi, zato se takšni ležaji imenujejo samonaravnalni. Ležaji so mazani s strojnim oljem in dovajani skozi luknje v pušah iz podložke iz klobučevine 12, namočene v olje. Ti ležaji so enostavnejši od krogličnih in delujejo tiho.
Tok, ki poteka skozi tuljavo, ustvarja pulzirajoč magnetni tok, katerega del prodre v kratkostični zavoj na polu. Tako sta v elektromotorju s kratkostičnim obratom na polu dva magnetna toka, premaknjena za določen kot. Ustvarjajo rotacijsko magnetno polje. Zaradi neenakosti obeh tokov se vektor nastalega polja ne samo vrti, temveč se v različnih časovnih intervalih spreminja tudi po velikosti. Zato konec vektorja ne bo opisoval kroga, ampak elipso. Vendar je to povsem dovolj za premikanje rotorja med zagonom.
Zagonski moment takega elektromotorja je zelo majhen in znaša 20-40% nazivnega momenta. Zato se elektromotorji s kratkostičnim zasukom na drogu uporabljajo samo tam, kjer ni potreben velik začetni navor, na primer za namizne ventilatorje, magnetofone, električne predvajalnike itd.
Za povečanje vrtilnega momenta so med konice polov vstavljene tanke jeklene plošče 6, imenovane magnetni šanti. Zaradi tega se poveča magnetni tok, ki ga pokriva kratkostična tuljava, magnetno polje pa se približuje bolj krožno.
Preobremenitvena zmogljivost elektromotorja je zelo majhna, največji navor pa komaj doseže 1,2-kratnik nazivnega navora. Če obremenitev gredi preseže ta trenutek, se rotor ustavi. Za razliko od drugih vrst elektromotorjev se v stanju kratkega stika statorski tok nekoliko poveča,
zato lahko elektromotor za dolgo časa priključiti na omrežje s stacionarnim rotorjem. Ta lastnost se uporablja v nekaterih vezjih. Zaradi velikih izgub energije v kratkostični tuljavi izkoristek elektromotorja ne presega 40 %.
Motorji s kratkostičnimi zavoji na polu so nepovratni. Rotor se vedno vrti v smeri kratkostičnega zavoja, kar je prikazano s puščico na sl. 3-5.
3-4. ELEKTROMOTORJI Z ZAGONSKIMI NAVITJI
Najbolj razširjeni so enofazni asinhroni elektromotorji z zagonskimi navitji, pri katerih navitja niso zgoščena v obliki tuljav, npr.
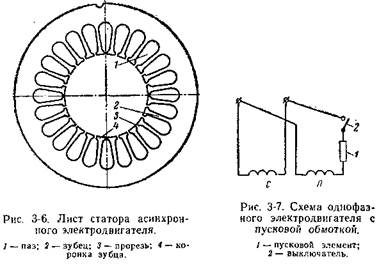
Na sl. Slika 3-6 prikazuje list statorja elektromotorja z začetnim navitjem. Na notranjem obodu so enakomerno razporejeni utori 1, med katerimi so zobje 2; preko njih prehaja magnetni tok od statorja do rotorja. Reže 3 se uporabljajo za vstavljanje vodnikov za navijanje v utore. Razširjeni del zoba 4 imenujemo krona.
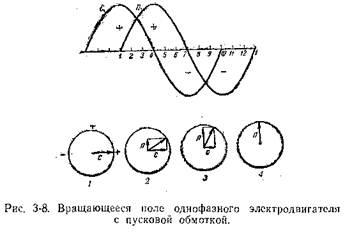
Na sl. 3-7 prikazano shema vezja enofazni elektromotor z zagonskim navitjem. Takšni elektromotorji imajo na statorju dve navitji - delovno navitje C in zagonsko navitje P. Delovno navitje zavzema 2/3 utorov, zagonsko navitje pa 1/3. Zato mora biti skupno število statorskih rež večkratnik treh. Delovno navitje ostane ves čas delovanja elektromotorja priključeno na omrežje, zagonsko navitje pa se vklopi le, ko se rotor v času zagona pospeši, nato pa se izklopi s stikalom 2, ko rotor doseže 70-80 % nazivne hitrosti vrtenja. Kot stikalo se uporabljajo gumbi z ročnim izklopom ali avtomatska centrifugalna stikala, ki se nahajajo na rotorju in prekinejo tokokrog, ko rotor doseže hitrost vrtenja nad 70% nazivne hitrosti. Vezje začetnega navitja vključuje začetni element 1, ki najpogosteje predstavlja aktivni upor ali kondenzator.
Tukaj se morate seznaniti s konceptom električnih stopinj, ki jih pogosto najdemo v navitjih električni stroji. Iz geometrije vemo, da je krog razdeljen na 360°. Te stopnje se imenujejo geometrijske ali prostorske. Ker je stator krog, vedno vsebuje 360 prostorskih stopinj. Število električnih stopinj v obodu statorja je lahko enako 360 ali več celih krat. Če sta na statorju dva pola, potem je tudi število električnih stopinj 360. Če pa so na statorju štirje poli, potem za 360° električni. vzeti bi morali del kroga, na katerem se nahajata severni in južni pol. Ker celoten krog zavzema štiri polne razdelke, bo število električnih stopinj dvakrat večje od prostorskih. Tako v štiripolnem navitju obseg statorja vsebuje 720° električnega, v šestpolnem navitju 1080° električnega. itd.
Iz tega lahko sklepamo splošno pravilo da je število električnih stopinj v krogu enako 360 p, kjer je p število parov polov navitja.
Za zagotovitev najboljše lastnosti elektromotorja morajo biti izpolnjeni naslednji pogoji:
1) delovna in zagonska navitja morajo biti nameščena na obodu statorja pod kotom 90 °;
2) tokovne vektorje v delovnih in začetnih navitjih je treba premakniti za 1/4 obdobja;
3) sile magnetiziranja v obeh navitjih morajo biti enake, tj. Produkti tokov navitij in število njihovih obratov morajo biti enaki.
Tokovni vektorji delovnih in začetnih navitij tvorijo vrtljivo magnetno polje. To je lahko prikazano na naslednjem diagramu (slika 3-8). Predstavimo tokove delovnega in zagonskega navitja kot dve sinusoidi, premaknjeni za 1/4 obdobja. Sinusoida tokov delovnega navitja je označena s črko C, začetno navitje pa s črko P. V različnih časih bodo tokovni vektorji pod različne kote zato jih bo treba geometrično zložiti.
Obdobje sinusnega vala začetnega navitja razdelimo na 12 delov in jih označimo s številkami na vodoravni osi.
Za vsako točko na sinusoidni osi morate sestaviti kroge in jih označiti z istimi številkami kot točke na sinusoidni osi. Vsak krog ustreza eni trenutni vrednosti v delovnem in zagonskem navitju. Narisali bomo vektorje polja, ki jih ustvarijo tokovi delovnega navitja vzdolž vodoravnega premera: pozitivne vrednosti polja so desno od središča kroga, negativne vrednosti pa levo. Pozitivne vrednosti polj začetnega navitja bomo narisali navzgor vzdolž navpičnega premera, negativne pa navzdol.
Na sl. Slika 3-8 prikazuje štiri kroge za sinusne točke 1, 2, 3 in 4. Diagonale pravokotnikov so vektorji nastalega polja. Bralcem bomo prepustili, da sestavijo kroge in dodajo vektorje za točke 5, 6 in 7 itd. Primerjava tortnih diagramov pokaže, da se nastalo polje vrti s sinhrono frekvenco. Nastalo polje bo induciralo tokove v navitju rotorja in ta se bo začel vrteti.
Tokovni vektorji delovnih in začetnih navitij ustvarjajo vrtljivo magnetno polje. Če so izpolnjeni vsi trije zgoraj navedeni pogoji, potem konec nastalega vektorja polja opisuje krog in polje imenujemo krožno. Če pa vsaj eden od navedeni pogoji, potem se bo vektor nastalega polja spremenil v magnitudi in magnetno polje ne bo krožno, ampak eliptično. A tudi z eliptičnim poljem imajo elektromotorji lahko zadovoljive obratovalne in zagonske lastnosti.
3-5. ELEKTROMOTORJI Z ZAGONSKIMI UPORI (UPORI) IN KONDENZATORJI
Kot je navedeno zgoraj, mora obstajati premik med tokovnimi vektorji v delovnem in začetnem navitju, ki mora biti enak 1/4 obdobja, da se tvori krožno polje. Premik tokovnih vektorjev je mogoče doseči, če sta induktivni in aktivni upor delovnega in zagonskega navitja različni. To lahko storite z vključitvijo aktivnega upora ali kondenzatorja v vezje začetnega navitja.
Najbolj razširjeni so enofazni elektromotorji z zagonskim uporom, ki je zaprt v samem zagonskem navitju. Takšne elektromotorje imenujemo elektromotorji z vgrajenim uporom. Pri teh elektromotorjih delovno navitje zavzema % rež in ima visoko induktivno reaktanco. Zagonsko navitje zavzema le 1/3 statorskih utorov, ima manjše število ovojev in zato bistveno manjšo induktivno reaktanco.
Aktivni upor začetnega navitja mora biti večji od aktivnega upora delovnega navitja. Zato je navita z žico manjšega preseka. Pri elektromotorjih, ki delujejo z redkimi zagoni, se presek žice začetnega navitja toliko zmanjša, da gostota toka v njem doseže 40 A / mm 2, včasih pa tudi več. Aktivni upor ne more ustvariti premika med vektorji delovnega in zagonskega navitja, ki je enak 1/4 obdobja, zato nastalo polje ne bo krožno, ampak eliptično. Eliptično polje lahko obravnavamo kot vsoto dveh neenakih krožnih polj, ki se vrtita v različnih smereh. Eden od njih je neposreden in ustvarja navor, drugi pa vzvratni in ustvarja zavorni moment. Vzvratno vrtljivo polje poslabša zagonske in obratovalne lastnosti elektromotorja.
Pri elektromotorjih z vgrajenim zagonskim uporom je razmerje med začetnim in nazivnim momentom 1 -1,2, razmerje začetni tok na nominalno 6,5-9. Zato se uporabljajo tam, kjer niso potrebni zelo veliki zagonski momenti (hladilniki, pralni stroji). Tovarne elektroindustrije proizvajajo elektromotorje z vgrajenim zagonskim uporom tipa AOLB v območju moči od 18 do 600 W pri napetostih 127, 220 in 380 V, hitrosti vrtenja 3000 in 1500 vrt/min (sinhroni).
Za pogone s težkimi zagonskimi pogoji se uporabljajo elektromotorji, pri katerih se kot začetni element 1 uporablja kondenzator (glej sliko 3-7). Ti elektromotorji so označeni s črkami AOLG in imajo enake nazivne podatke, mere, težo in delovna navitja kot elektromotorji tipa AOLB. Imajo različna zagonska navitja in s tem različne zagonske karakteristike.
Kot je znano iz elektrotehnike, vključitev kondenzatorja v vezje vodi do dejstva, da je začetni tok navitja pred delovnim tokom navitja. S pomočjo kondenzatorja lahko premaknete tokove delovnih in začetnih navitij za 90 o in tako ustvarite krožno vrtljivo polje ob zagonu. Elektromotorji z zagonskimi kondenzatorji imajo dobre zagonske lastnosti, to je veliko razmerje med zagonskim in nazivnim navorom (2-2,5) in nizko razmerje zagonskega toka (3-4 nazivni tok). Za ustvarjanje velikega začetni navor Tudi majhen 50 W elektromotor pri 127 V potrebuje kondenzator 40 µF. Z naraščajočo napetostjo se kapacitivnost kondenzatorja močno zmanjša in pri napetosti motorja 220 V znaša 15 μF.
Pri elektromotorjih z zagonskimi navitji po izklopu teh navitij ostane 1/3 statorskih rež neuporabljenih. Zato imajo takšni elektromotorji zmanjšano moč. Za povečanje moči se uporabljajo elektromotorji, pri katerih zagonsko navitje ostane vklopljeno. Za ustvarjanje tokovnega premika v delovnem C in zagonskih navitjih je v vezje slednjega vključen kondenzator (slika 3-9). Takšne elektromotorje imenujemo kondenzatorski motorji, zagonsko navitje, ki se uporablja med delovanjem elektromotorja, pa pomožno ali kondenzatorsko in ga označujemo s črko B. Pri kondenzatorskih elektromotorjih oba navitja zasedata enako število rež. Z uporabo kondenzatorja lahko ustvarite 90 ° premik med tokovnimi vektorji v navitjih.
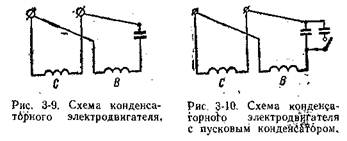
Tako se v kondenzatorskem elektromotorju pri nazivni moči ustvari krožno polje. Zahvaljujoč temu imajo kondenzatorski elektromotorji dobre lastnosti: visoka moč gredi, visok izkoristek (60-75%) in visok faktor moči (cos φ=0,8÷0,95). Vendar pa je začetni navor takih elektromotorjev majhen. Običajno ne presega 30% nominalne vrednosti. To je razloženo z dejstvom, da bo ob zagonu magnetno polje elektromotorja eliptično. Za izboljšanje zagonskih lastnosti elektromotorja v trenutku zagona je zagonski kondenzator priključen vzporedno z delovnim kondenzatorjem (slika 3-10). Tako med zagonom premik toka izvedeta dva kondenzatorja - delovni in zagonski, kar zagotavlja ustvarjanje krožnega polja med zagonom. Po zagonu elektromotorja se zagonski kondenzator izklopi z gumbom ali centrifugalnim stikalom.
Trenutno tovarne elektroindustrije proizvajajo kondenzatorske elektromotorje serije ABE, ki imajo visoko učinkovitost, faktor moči, ki se približuje enotnosti, ter dobre zagonske in obratovalne lastnosti. Pokrivajo moči od 10 do 400 W pri vrtljajih 1.000, 1.500 in 3.000 vrt/min (sinhrono) za omrežja 127 in 220 V.
Vrsta kondenzatorskega elektromotorja je elektromotor z masivnim rotorjem, izdelanim iz jekla ali litega železa, brez utorov ali navitij. Ti elektromotorji imajo visok začetni navor. Hitrost vrtenja je mogoče nastaviti v širokem območju z reostatom v tokokrogu delovnega navitja in pri vseh hitrostih vrtenja od število vrtljajev v prostem teku do polne obremenitve elektromotor deluje stabilno. Elektromotorji z masivnim rotorjem so enostavni, zanesljivi in tihi. Tak elektromotor lahko dobimo iz katerega koli kondenzatorskega motorja z zamenjavo njegovega rotorja.
Elektromotorji z masivnim rotorjem lahko po svojih delovnih karakteristikah nadomestijo DC ali DC kolektorske motorje. AC. Zaradi velikih izgub v rotorju in magnetnega sipanja imajo nizek izkoristek in faktor moči, zato so po dimenzijah in teži večji od krtačenih elektromotorjev enake moči.
Elektromotorji z zagonskimi navitji so lahko obrnjeni. Če želite to narediti, je dovolj, da zamenjate konce delovnega ali zagonskega navitja.
3-6. SHEMA NAVITJA ZA ENOFAZNE ELEKTROMOTORJE
Navitna vezja so zgrajena za porazdeljena navitja statorja. Diagrami prikazujejo vodnike delovnih in začetnih navitij ter njihove povezave. Poleg tega diagrami kažejo, iz katerih utorov izhajajo začetki in konci delovnih in začetnih navitij. Sponke navitja so označene z naslednjimi črkami in številkami: začetek in konec delovnega navitja C1 oziroma C2; začetek in konec začetnega navitja P1 oziroma P2.
V kondenzatorskih elektromotorjih se zagonsko navitje pogosto imenuje pomožno, saj ostane vklopljeno ves čas delovanja elektromotorja, njegove sponke pa označujejo: začetek B1; konec B2.
Navitja statorja enofaznih elektromotorjev so enoslojna in dvoslojna. Pri prvem stran tuljave zavzema celoten utor, vse stranice tuljav, ki ležijo v utorih, pa tvorijo eno plast.
Pri dvoslojnih navitjih sta stranici dveh tuljav v vsaki reži, ločeni z izolacijskim distančnikom. Deli tuljav, ki ležijo v utorih, se imenujejo žlebovi. Deli tuljav, ki ležijo zunaj utorov, se imenujejo čelni.
Če želite sestaviti diagram navijanja, morate poznati naslednje podatke statorja:

Za enoslojna navitja se korak reže izračuna po formuli
Ta korak se imenuje diametralni, saj so pri dvopolnih strojih stranice tuljave nameščene v dveh diametralno nasprotnih režah.
V dvoslojnih navitjih se običajno uporablja skrajšani korak iz naslednjih razlogov. V vsakem elektromotorju na izmenični tok se poleg glavne sinusoide s periodo 1/50 s pojavljajo tudi sinusoide s krajšimi periodami, ki jih imenujemo višji harmoniki.

Pri enofaznih in dvofaznih elektromotorjih še posebej močno vpliva tretji harmonik s periodo 1/150 s. Izkrivlja lastnosti elektromotorja. Ustvarja tako imenovane padce na krivulji navora, zaradi katerih elektromotor ob zagonu ne more razviti nazivne vrtilne frekvence, ampak se zatakne pri hitrosti enaki 1/3 nazivne vrtilne frekvence. večina učinkovita sredstva Za boj proti tretjemu harmoniku je treba skrajšati korak navitja za 1/3 razdelka pola.
Iz sl. 3-11 je razvidno, da pri diametralnem koraku stranice tuljave ležijo pod srednjimi točkami severnega in južnega pola in pri ustvarjanju e. d.s. Vključen je celoten magnetni pretok na razdelek pola.
Na sl. Slika 3-12 prikazuje položaj zavoja tuljave s skrajšanim korakom za 1/3 polne delitve. Tuljava ne pokriva več celotnega razdelka polov, temveč le 2/3 razdelka polov. Zato je v njej inducirana npr. d.s. bo manjši kot pri diametralnem koraku, vendar e. d.s., inducirana s tretjim harmonikom, se medsebojno izničita. Zmanjšanje e. d.s. ko se korak skrajša, se upošteva s koeficientom skrajšanja navitja. V izračunih pogl. 4 je ta koeficient vključen v formule za izračun.
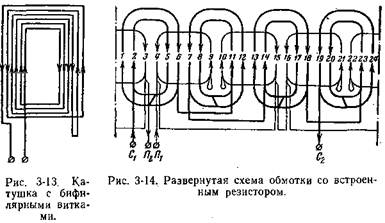
Najpogostejši so elektromotorji z vgrajenimi zagonskimi upori. Za takšne elektromotorje je potrebno doseči velik aktivni upor navitja brez povečanja njegove induktivne upornosti. To dosežemo z uporabo tuljav z bifilarnimi zavoji. Na sl. Slika 3-13 prikazuje tuljavo z bifilarnimi zavoji. V tej tuljavi je šest ovojev in vsi prispevajo k aktivnemu uporu tuljave. Toda zadnja dva zavoja sta navita v nasprotni smeri. Ko tok teče skozi zavoje tuljave n.s. zadnji štirje zavoji so medsebojno kompenzirani in samo prva dva zavoja sodelujeta pri ustvarjanju magnetnega pretoka.
Na sl. Slika 3-14 prikazuje diagram navitja statorja z vgrajenim uporom. Stator ima 24 rež, od katerih 16 rež zaseda delovno navitje, 8 rež pa začetno navitje. Delovno in zagonsko navitje ima štiri tuljave. Gre torej za štiripolni elektromotor s sinhrono hitrostjo 1500 vrt/min. Stran tuljave delovnega navitja zavzema dve reži, stran tuljave začetnega navitja pa eno režo. Na diagramu so žice, ki ležijo v utorih, označene z navpičnimi črtami. Številke utorov so navedene v prelomih vrstic. Diagram je notranji pogled na obod statorja, ki je tako rekoč prerezan in obrnjen na ravnino. Nekaj težav pri branju razgrnjenega tokokroga je, da sta začetek in konec pretoka (reži 1 in 24), ki ležita drug ob drugem na statorju, v razpetem tokokrogu videti oddaljena drug od drugega po celotni dolžini tokokroga. , čelni del ene od tuljav pa je odrezan.
Ko berete diagram, morate v mislih slediti povezavam od konca diagrama do začetka.
Ko sestavljate diagram, morate izbrati mesto reza tako, da se razreže najmanjše število tuljav in da se linija reza nahaja simetrično glede na tuljave.
Razširjeni diagram jasno prikazuje povezave na obeh straneh statorja, smer tokov in menjavo polarnosti. V tem diagramu so predvidene smeri tokov v navitju iz sponk C1 in P1. V delih utorov smer puščic navzgor in navzdol razdeli navitje na štiri cone glede na število polov elektromotorja. Poševne črte na čelnih delih prikazujejo prehode z enega pola na drugega.
Za ustvarjanje bifilarnih zavojev je vsaka tuljava začetnega navitja navita iz dveh tuljav, nato pa je ena od njih obrnjena za 180 °. Tako nastanejo zanke, ki so vidne v utorih 9, 10, 21 in 22.
Postopek za izdelavo diagrama in polaganje navitja v utore je določen v § 5-8.
Na sl. Slika 3-15 prikazuje diagram statorskega navitja kondenzatorskega elektromotorja tipa ABE. To je dvoslojno navitje, zato je vsak utor na diagramu označen z dvema navpičnima črtama. Črtkana črta označuje stran tuljave, ki leži na dnu utora, polna črta pa stran tuljave, ki leži na. vrh utora. Celotno navitje je sestavljeno iz simetričnih tuljav z enakim razmikom rež. Debele črte označujejo tuljave delovnega navitja, tanke črte pa začetno (pomožno) navitje.
Stator ima dva pola. Diametralni korak navitja vzdolž rež bi bil z = 18/2 = 9. To bi pomenilo, da mora biti prva tuljava nameščena v reži 1 in 10, saj je 1+9=10.

Iz diagrama je razvidno, da je tuljava položena v reže 1 in 8. To pomeni, da gre za navitje s skrajšanim korakom. Visina je skrajšana za 2/9 polno delitev, tako da tretji harmonik ni popolnoma kompenziran.
Kot vsak kondenzatorski elektromotor, vsako navitje zaseda polovico statorskih rež, to je devet rež. Ker pa je devet liho število, delovno navitje prvega pola zaseda štiri reže (1, 2, 3 in 4), navitje drugega pola pa pet rež (10, 11, 12, 13 in 14).
Da bi se tuljave delovnega in začetnega navitja električno premaknile za 90°, začetno navitje prvega pola zavzame pet utorov (5, 6, 7, 8 in 9), drugega pola pa štiri utore (15 , 16, 17 in 18). Zateči se je treba k asimetrični razporeditvi navitij v tovarniško izdelanih elektromotorjih, da bi uporabili isti žig za statorske plošče, ko različne številke drogovi.
Dvoslojna navitja so izdelana na naslednji način. V vsakem navitju so tuljave enega pola povezane zaporedno in tvorijo skupino tuljav. Ta skupina je z neprekinjeno žico navita na šablono, ki ima toliko utorov, kolikor utorov zaseda stran tuljave na statorju. Navite tuljave so nameščene v reže, izolirane s tulci. Najprej vstavite spodnje stranice tuljav, ki ležijo na dnu utorov, nato pa še zgornje.
Nato se konci tulcev, ki štrlijo iz utorov, upognejo in utori zagozdijo s klini iz tekstolita ali trdega lesa.
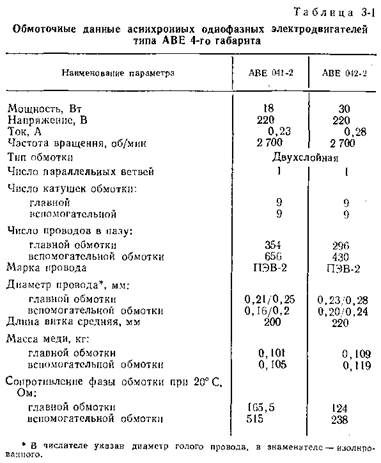
V tabeli 3-1 prikazuje podatke o navitjih motorjev, katerih navitja so izdelana po tej shemi. To so elektromotorji četrte velikosti z enakimi premeri statorjev, vendar različnih dolžin.
N.V. Vinogradov, Yu.N. Vinogradov
Kako sami izračunati in narediti elektromotor
Moskva 1974
Omrežne napetosti in tokokrogi navitja statorja električni motor
Če je v potnem listu elektromotorja navedeno na primer 220/380 V, to pomeni, da je elektromotor mogoče priključiti tako na omrežje 220 V (priključna shema navitij - trikotnik) kot na omrežje 380 V (priključna shema navitij - zvezda). Navitja statorja asinhronega elektromotorja imajo šest koncev.
V skladu z GOST imajo navitja asinhronega motorja naslednje oznake: Faza I - C1 (začetek), C4 (konec), Faza II - C2 (začetek), C5 (konec), Faza III - C3 (začetek), C6 (konec).
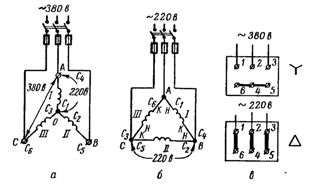
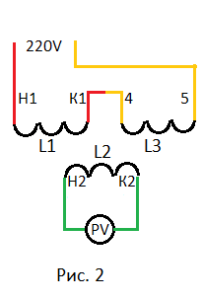
riž. 1. Shema povezovanja navitij asinhronega motorja: a - v zvezdi, b - v trikotniku, c - izvedba vezij "zvezda" in "trikot" na priključni plošči.
Če je napetost v omrežju 380 V, morajo biti navitja statorja motorja povezana v zvezdni konfiguraciji. IN skupna točka v tem primeru so zbrani bodisi vsi začetki (C1, C2, C3) bodisi vsi konci (C4, C5, C6). Med koncema navitij AB, BC, CA se uporablja napetost 380 V. V vsaki fazi, to je med točkama O in A, O in B, O in C, bo napetost √3-krat manjša: 380/√3 = 220 V.


Metode povezovanja elektromotorjev
Če je napetost v omrežju 220 V (z napetostnim sistemom 220/127 V, ki ga trenutno skoraj nikjer ne najdemo), morajo biti navitja statorja motorja povezana v trikotniku.
V točkah A, B in C je začetek (H) prejšnjega navitja povezan s koncem (K) naslednjega navitja in z omrežno fazo (slika 1, b). Če predpostavimo, da je med točkama A in B vklopljena faza I, med točkama B in C - faza II in med točkama C in A - faza III, potem so v shemi "trikotnika" povezani: začetek I (C1) z konec III(C6), začetek II (C2) s koncem I (C4) in začetek III (C3) s koncem II (C5).
Pri nekaterih motorjih so konci faz navitij izpeljani na priključno ploščo. V skladu z GOST so začetki in konci navitij izpisani v vrstnem redu, prikazanem na sliki 1, c.
Če je zdaj treba navitja motorja povezati v zvezdni konfiguraciji, so sponke, na katere so izpeljani konci (ali začetki), medsebojno zaprte, omrežne faze pa so povezane s sponkami motorja, na katere so začetki (oz. konci) so izvlečeni.
Pri povezovanju navitij motorja v "trikotnik" so sponke povezane navpično v parih, omrežne faze pa so povezane s skakalci. Navpični mostički povezujejo začetek I s koncem faze III, začetek II s koncem faze I in začetek III s koncem faze II.
Pri določanju diagrama povezave navitij lahko uporabite naslednjo tabelo:

Potni list za električni motor
Določitev usklajenih sponk (začetki in konci) faz statorskega navitja.
Na sponkah statorskih navitij motorja so običajno standardni zapis na kovinskih kompresijskih obročih. Vendar so ti obročki za stiskanje izgubljeni. Nato se pojavi potreba po opredelitvi konsistentnih zaključkov. To se naredi v tem vrstnem redu.
Najprej se s testno svetilko določijo pari sponk, ki pripadajo posameznim faznim navitjem (slika 2).
riž. 2. Določanje faznih navitij s preskusno svetilko.
Eden od šestih sponk navitja statorja motorja je priključen na omrežno sponko 2, en konec preskusne lučke pa na drugo omrežno sponko 3. Drugi konec preskusne lučke se izmenično dotika vsakega od ostalih petih sponk navitij statorja, dokler lučka ne zasveti. Če lučka zasveti, to pomeni, da dva terminala, priključena na omrežje, pripadata isti fazi.
Zagotoviti je treba, da sponke navitij med seboj ne pridejo v kratek stik. Vsak par terminalov je označen (na primer z vezanjem v vozel).
Ko smo določili faze navitja statorja, nadaljujemo z drugim delom dela - določitvijo ujemajočih se zaključkov ali "začetkov" in "koncev". Ta del dela je mogoče opraviti na dva načina.
1. Metoda preoblikovanja. V eni od faz se prižge kontrolna lučka. Drugi dve fazi sta povezani zaporedno in vključujeta tudi omrežje.
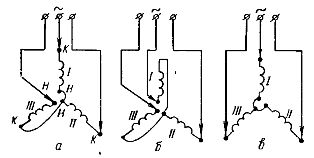
Če se izkaže, da sta ti dve fazi vklopljeni tako, da je v točki O pogojni "konec" ene faze povezan s pogojnim "začetkom" druge (slika 3, a), potem magnetna nota ∑F prečka tretjo navijanje in inducira v njem EMF.
Lučka bo z rahlim sijajem pokazala prisotnost EMF. Če toplota ni opazna, potem kot indikator uporabite voltmeter z lestvico do 30 - 60 V.

riž. 3. Določitev začetkov in koncev v faznih navitjih motorja z metodo transformacije
Če se na primer pogojni "konci" navitij srečajo v točki O (slika 3, b), bodo magnetni tokovi navitij usmerjeni drug proti drugemu. Skupni tok bo blizu ničle in žarnica ne bo svetila (voltmeter bo pokazal O). V tem primeru je treba sponke, ki pripadajo kateri od faz, zamenjati in ponovno vklopiti.
Če ima svetilka toploto (ali voltmeter kaže nekaj napetosti), je treba konce označiti. Eden od terminalov, ki se srečata v skupni točki O, dobi oznako H1 (začetek faze I), drugi terminal pa K3 (ali K2).
Oznaki K1 in H3 (ali H2) sta nameščeni na sponkah, ki se nahajata v skupnih vozlih (vezanih v prvem delu dela) s H1 oziroma K3.
Za določitev usklajenih priključkov tretjega navitja sestavite vezje, prikazano na sliki 3, c. Svetilka se vklopi v eni od faz z že označenimi sponkami.
2. Način izbire faz. Ta metoda določanja usklajenih sponk (začetki in konci) faz statorskega navitja se lahko uporablja za motorje, ki niso visoka moč- do 3 - 5 kW.
riž. 4. Določitev "začetkov" in "koncev" navitja z izbiro vezja "zvezda".
Ko so sponke posameznih faz določene, jih naključno povežemo v zvezdo (po en priključek iz faze priključimo na omrežje, po en priključek pa na skupno točko) in motor priključimo na omrežje. Če vsi pogojni "začetki" ali vsi "konci" zadenejo skupno točko, potem bo motor deloval normalno.
Če pa se ena od faz (III) izkaže za "obrnjeno" (slika 4, a), potem motor močno brni, čeprav se lahko vrti (vendar ga je mogoče zlahka upočasniti). V tem primeru je treba zaključke katerega koli navitja naključno (na primer I) zamenjati (slika 4, b).
Če motor spet brni in deluje slabo, je treba fazo znova vklopiti kot prej (kot na diagramu a), vendar je treba obrniti drugo fazo - III (slika 3, c).
Če motor tudi po tem brni, potem je treba tudi to fazo nastaviti kot prej in obrniti naslednjo fazo - II.
Ko motor začne delovati normalno (slika 4, c), je treba vse tri terminale, ki so povezani s skupno točko, označiti na enak način, na primer "konce", nasprotne pa "začetke". Po tem lahko zbirate delovni diagram naveden v potnem listu motorja.

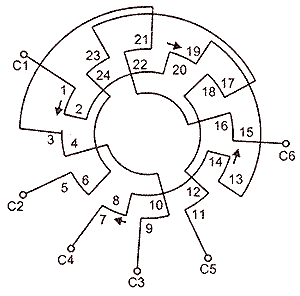
Obstaja trifazni asinhroni motor, ki nima priključnega bloka; ven pride šest koncev žic, vendar ne morete ugotoviti, kateri snop pride ven. Poskusimo skupaj rešiti to težavo.
Najprej primernost. Upor je normalen - pokličemo (najdemo) vsako navitje, lahko uporabite isti megohmmeter, vendar je bolje uporabiti ohmmeter. Eden se je odločil - njegove zaključke moramo takoj označiti. To bomo naredili za vsa tri navitja. Lahko ga poljubno označite, vendar mora imeti vsak žebljiček svoje ime, da ga ne zamenjate z drugim žebljičkom.
Na primer, določil sem prvo navijanje L1, njegovi konci so bili označeni s H1, K1. Zakaj je temu tako? Določili bomo začetek in konec statorskih navitij. Kje je začetek in kje konec za prvega, ni pomembno. Glavno je, da se drugi strinjajo z njo. Zato je v prvem navitju en terminal označen kot začetek (H1), drugi - konec (K1), da ga pozneje ne bi prepisali. Označevanje lahko izvedete z markerjem na kambrikih, nameščenih na žice, lahko s trakom zalepite preprost kos papirja in ga nato pretvorite v kambrik. Na papirju je še bolj priročno, ko morate znova narediti oznake. Lahko pa takoj postavite cev z oznako na sponke H1, K1, vse je pripravljeno.
Določimo L2, najdene zaključke označimo kot 2, 3. Za tretji (L3) - številke 4, 5.
Zdaj bomo pravzaprav določili začetek in konec navitij asinhronega motorja. Sledite zaporedju dejanj v naslednjem vrstnem redu: 
- Žico s številko 2 priključimo na sponko K1 (slika 1).
- Na nožice 4, 5 priključimo voltmeter za merjenje izmenične napetosti.
- 220V priključimo na žice H1, 3, manj je možno, vendar le izmenična napetost.
- Zabeležite odčitek voltmetra in izklopite napetost.
- Med seboj zamenjamo žice 2, 3; priključite napetost, zabeležite odčitek voltmetra.
Znatno višji odčitek voltmetra kaže pravilno povezavo navitja H1, K1 - 2, 3. Najvišji odčitek je bil recimo pri prvi povezavi. To pomeni, da je nožica 2 začetek, nožica 3 pa konec. Žico 2 končno označimo kot H2, žico 3 pa kot K2.
Naprej.
- Namesto sedaj H2, K2, priključimo žico 4 na K1, voltmeter pa na H2, K2 (slika 2).
- Na žice H1, 5 napajamo napetost. Odčitavanje posnamemo.
- Izklopite napetost. Zamenjamo žico 4 iz žice 5. Vklopimo. Indikacija.
Recimo, da je bil v drugem primeru odčitek voltmetra bistveno višji. To pomeni, da je žica 5 začetek L3 (označeno kot H3), žica 4 je konec L3 (K3).
Tako sta bila določena začetek in konec statorskih navitij asinhronega motorja, le .
Pomembno komponento elektromotorji - njegova navitja, v katerih se pojavljajo glavni delovni procesi za pretvorbo energije. Najpogostejši tipi električnih strojev vključujejo:
trifazna navitja strojev z izmeničnim tokom, ki se običajno uporabljajo v statorjih trifaznih asinhronih in sinhronih strojev, kot tudi v rotorjih asinhroni motorji z drsnimi obroči.
enofazna navitja asinhroni statorji enofazni motorji z rotorjem s kletko.
navitja armatur komutatorskih strojev enosmernega in enofaznega izmeničnega toka.
kratkostična navitja rotorja asinhroni elektromotorji.
vzbujalna navitja sinhronskih in komutatorskih strojev.
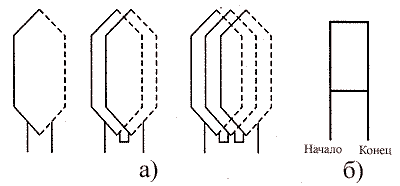
Navitja polja sinhronskih in komutatorskih strojev so praviloma sestavljena iz razmeroma preprostih polnih tuljav. Enostavna je tudi zasnova kratkostičnih navitij rotorjev asinhronih motorjev. Preostale vrste navitij, navedene zgoraj, so precej kompleksni sistemi izolirani vodniki, nameščeni v utore, povezani v skladu s posebnimi vezji, ki zahtevajo posebno študijo.
Zasuk navitij:
Najenostavnejši element navitja je zavoj, ki je sestavljen iz dveh zaporedno povezanih vodnikov, nameščenih v utore, ki se običajno nahajajo pod sosednjimi nasprotnimi poli.
Tuljavni vodniki, ki ležijo v utorih, so njegove aktivne strani, saj se tu inducira EMF iz glavnega magnetnega polja stroja. Deli tuljave, ki se nahajajo zunaj utora, povezujejo aktivne vodnike med seboj in se nahajajo na koncih magnetnega kroga, se imenujejo čelni deli.
Prevodniki, ki tvorijo zavoj, so lahko sestavljeni iz več vzporednih žic. Običajno se to naredi, da postane navijanje mehko in se lažje prilega v utore.
Eden ali več zaporedno povezanih zavojev tvori tuljavo ali odsek navitja. Če je odsek sestavljen iz enega zavoja, se takšno navijanje imenuje navitje palice, saj v tem primeru vodniki, ki se nahajajo v utorih, običajno predstavljajo toge palice. Navitje, sestavljeno iz odsekov z več zavoji, se imenuje navitje tuljave.
Navijalna tuljava:
Tuljava ali odsek navitja je označen s številom ovojev wc in korakom y, to je številom zob magnetnega vezja, ki jih pokriva. Torej, na primer, če ena stran tuljave (odsek) leži v prvem utoru, druga pa v šestem, potem tuljava pokriva pet zob in njen korak je pet (y = 5). Korak je torej lahko definiran kot razlika med številom utorov, v katere sta nameščeni obe strani tuljave (y = 6 - 1 = 5).
Pogosto v navitih podatkih in strokovna literatura korak je označen s številkami utorov (začenši od prvega), v katerih so položene stranice tuljave, tj. v tem primeru je ta oznaka videti tako: y = 1 - 6.
Korak navitja se imenuje diametričen, če je enak razdelku pola τ, to je razdalji med osema sosednjih nasprotnih polov, ali, kar je enako, številu rež (zob) na pol. V tem primeru je y = τ = z/2p, kjer je z število rež (zob) jedra, v katerem se nahaja navitje; 2р - število polov navijanja.
Če je korak tuljave manjši od diametralnega koraka, se imenuje skrajšan. Skrajšanje koraka, označeno s koeficientom krajšanja ky = y / τ, se pogosto uporablja v statorskih navitjih trifaznih asinhronih elektromotorjev, saj to prihrani žico za navijanje (zaradi krajših končnih delov), olajša polaganje navitja in izboljša lastnosti motorjev. Uporabljeno skrajšanje koraka je običajno v območju 0,85 - 0,66.
V dvopolnem električnem stroju sredinski kot, ki ustreza polarni delitvi, je enak 180°. Čeprav je pri štiripolnih strojih ta geometrijski kot enak 90 °, pri šestpolnih strojih - 60 ° itd., je splošno sprejeto, da je kot med osema sosednjih nasprotnih polov v vseh primerih enak 180 električnih stopinj. (180 električnih stopinj). Z drugimi besedami, razdelitev polov τ = 180 el. toča
Obstajajo enoslojna navitja, kjer je vsaka reža zasedena s stranjo ene tuljave (odseka), in dvoslojna navitja, kjer so stranice različnih tuljav (odsekov) nameščene v reže v dveh plasteh.
Načini prikaza navitij:
Metode upodabljanja navitij električnih strojev so precej običajne in izvirne. Navitja vsebujejo veliko število vodnikov, na risbi pa je skoraj nemogoče upodobiti vse povezave in vodnike. Zato se moramo zateči k prikazovanju navitij v obliki diagramov.
V glavnem uporabljajo dve glavni metodi prikazovanja navitij na diagramih.
Pri prvi metodi je cilindrična površina jedra skupaj z navitjem (v komutatorskih strojih pa skupaj s komutatorjem) tako rekoč v mislih razrezana vzdolž generatrike in razgrnjena na risalno ravnino. To vrsto vezja imenujemo razširjena ali pometalna vezja (slika 2.1).
riž. 2.1. Razširjen diagram trifaznega enoslojnega koncentričnega navitja z z = 24, 2р = 4.
Pri drugi metodi se navitje projicira na ravnino, pravokotno na os jedra, ki prikazuje končni pogled navitja (pri komutatorskih strojih običajno s strani komutatorja). Prevodniki (ali aktivne strani odsekov in tuljav), ki se nahajajo v utorih na površini jedra, so prikazani v krogih in prikazujejo končne (čelne) povezave navitja. Če je potrebno, upodobite ne samo končne povezave navitja, ki so vidne s te strani, ampak tudi tiste, ki se nahajajo z hrbtna stran jedro ima nevidne čelne dele, njihova podoba pa je v tem primeru postavljena izven oboda jedra. Sheme te vrste se imenujejo končne ali krožne (slika 2.2).

riž. 2.2. Diagram končnega navitja m = 3, z = 24, 2р = 4.
Diagrami končnega in raztegnjenega navijanja:
Najpogostejše sheme so tiste, izdelane po prvi metodi. Lažje so berljivi in bolj vizualni. Za lažje branje in izvajanje končnih diagramov so izvedeni na poenostavljen način (slika 2.3). Toda tudi po tem se za ovoja, ki nima dovolj izkušenj z delom s končnimi vezji, zdijo nerazumljivi in težko berljivi. V razširjenih diagramih je razporeditev tuljav in skupin tuljav, povezava tuljav in skupin tuljav videti bolj realistična in razumljiva.
riž. 2.3. Končni krog z 2p = 4, a = 1.
Diagrami dajejo dokaj jasno predstavo o strukturi in postavitvi vseh elementov navitja in povezav med njimi na jedru. Na diagramih so prikazani predvsem samo vodniki navitja, pri čemer poskušajo, če je le mogoče, izpustiti vse druge podrobnosti, ki zamašijo diagram in otežujejo branje. Potrebni dodatni tehnični podatki so navedeni v diagramih v obliki napisov.
Tuljava ali odsek na diagramu je prikazan kot ena linija, ne glede na to, ali je navit v eni žici ali v več vzporednih žicah, je sestavljen iz enega zavoja ali je večobraten. V razširjenem diagramu je odsek ali tuljava prikazana kot zaprta figura, ki spominja na dejansko konfiguracijo odseka (tuljave), iz katere se vejejo vodi.
V razširjenih dvoslojnih navitih vezjih so strani tuljav ali odsekov, ki ležijo bližje zračni reži, tj. zgornji sloj utori so prikazani s polnimi črtami, stranice, ki ležijo v spodnji plasti, pa s črtkanimi (pikčastimi) črtami. Včasih (v knjigah starejših izdaj) so aktivne strani tuljav v obeh plasteh utora prikazane kot polne črte, vendar so strani, ki ležijo v zgornji plasti, postavljene na levi strani, tiste, ki ležijo v spodnji plasti, pa postavljen na desni strani.
Na diagramih trifaznih navitij žic različne faze lahko upodabljajo s črtami, ki se med seboj razlikujejo, na primer s polnimi, črtkanimi in črtkano črtkanimi črtami različne barve ali različne debeline, dvojne črte z različnim senčenjem med njimi.
Diagrami običajno označujejo številke rež, številke kolektorskih plošč, številke odsekov in njihovih stranic, številke in oznake izhodnih koncev skupin tuljav, faze navitij, smeri tokov, fazna območja, magnetne lahko se navedejo tudi poljski drogovi itd. (sl. 2.4 - 2.6).

riž. 2.4. Razširjen diagram dvoslojnega navitja pri z = 24, 2р = 4, q = 2.
riž. 2.5. Predstavitev skupin tuljav v diagramih: a - razširjena, b - pogojna.

riž. 2.6. Pogojni diagrami dvoslojno navitje statorja: a - za tri faze pri 2p = 2; b - za eno fazo pri 2p = 2, c - za eno navitje statorja pri 1p = 4.
Sheme so potrebne ne le pri preučevanju načela delovanja navitij, njihove zasnove, lastnosti in značilnosti, temveč tudi za izvajanje navijalnega dela. Brez diagrama in brez preverjanja med delom je težko dokončati navijanje, zato morate preden začnete popravljati navitje, sestaviti diagram ali poiskati podoben v priročniku.
Poenostavljeni končni diagrami:
Treba je opozoriti, da so popolni razgrnjeni in končni diagrami kompleksnih večpolnih navitij z veliko številoŽlebovi so zelo obsežni in jih je težko brati.
V teh primerih se v procesu izdelave navitij, katerih elementi se ponavljajo, pogosto uporabljajo praktični podrobni diagrami, kjer je na primer prikazana samo ena faza (včasih del faze). trifazno navitje ali več zavitih delov zbiralni stroj. Veliko se uporabljajo tudi poenostavljeni končni diagrami, kjer so cele skupine tuljav upodobljene kot del loka z oznakami sponk, manjši elementi navitja pa niso upodobljeni ali pa so na diagramu upodobljeni ločeno. Poenostavljena končna vezja so primerna pri povezovanju med skupinami tuljav v kompleksnih navitjih.
Določitev začetka in konca navitij trifaznega motorja.
Včasih obstajajo trifazni elektromotorji, pri katerih sponke navitja praviloma niso označene po previjanju ali pri uporabi preveč "previdno". Če želite določiti začetke in konce navitij, morate:
- z ohmmetrom določimo navitja, označimo tri pare - tri navitja;
- označite eno žico na enem od navitij in nanjo priključite minus baterijo;
- priključite kazalni voltmeter na drugo navitje;
- z drugo žico prvega navitja se dotaknite pozitivnega pola baterije in poglejte, v katero smer se puščica odmika. Potrebno je, da se nagne naprej;
- ko se o tem prepričate, označite sponko, ki je priključena na plus voltmetra;
- podobno preverite in označite izhod na tretjem navitju.
Označene sponke se lahko štejejo za začetke ali konce in v skladu s tem povezujejo motor s trifaznim tokokrogom.
Določimo število sponk statorskih navitij elektromotorja in njihov namen
Elektromotor je povezan z virom energije preko sponk svojih notranjih navitij. Takšna navitja v trifazni motor- tri. Skupaj naj bi bilo torej šest sklepov. Toda izpod pokrova je praviloma sedem žic, ena od njih je "ohišje", povezana z ohišjem motorja. Ni vključen v prehransko shemo, vendar je potreben za varno delo.
Pogosto se zgodi, da je število vodnikov, ki izhajajo iz ohišja motorja, le trije. V tem primeru so preostali trije priključki "skriti" znotraj ohišja in da pridete do njih, morate previdno razstaviti elektromotor tako, da odstranite rotor. Ko najdete in odklopite manjkajoče tri žice (med seboj povezane v zvezdnem krogu), morate vsako od njih podaljšati in jih vse izvleči.
Včasih žice znotraj ohišja motorja niso povezane z zvezdo (tri na eni točki), temveč s trikotnikom. V tem primeru je naloga težja, vendar enaka: odklopite vse (tri pare) žičnih povezav, podaljšajte konce in jih izvlecite. Res je, da v našem primeru tega ni vredno storiti, saj so tukaj podane vse metode povezovalnih diagramov za elektromotorje, katerih navitja so povezana v trikotniku.
Običajno je na pokrovu ohišja elektromotorja nameščena škatla, ki vsebuje stikalni blok z mostički, po njihovi konfiguraciji lahko preprosto izsledite povezovalni diagram navitij.
Kako ugotoviti, po katerem vezju so povezani konci navitij elektromotorja?
Če povezave navitij vizualno niso vidne (priključki so izvedeni znotraj ohišja motorja), boste morali vrsto povezav (zvezda ali trikot) določiti posredno. V teoriji je to zelo enostavno narediti.
Shema povezovanja zvezdnih navitij elektromotorja je narejena s povezovanjem treh istoimenskih sponk (na primer koncev) na eni točki. Torej, če priključite generator izmeničnega toka na katerikoli dve sponki (od treh!) elektromotorja, se transformacija napetosti v sekundarno navitje, za katero se uporablja tretje navitje za meritve, ne bo zgodila in voltmeter priključen, kot je prikazano na sl. 1 ne bo pokazal nobene napetosti ali napetosti blizu nič voltov.
V praksi lahko namesto alternatorja uporabite navadno enoinpolvoltno baterijo (na primer 316), ki jo na kratko povežete s sponkami elektromotorja. V tem primeru je treba meritve napetosti opraviti na najnižji meji voltmetrske lestvice. Če je elektromotor velike moči, je treba namestiti napravo za merjenje toka (mikroamperov).
V skrajnih primerih lahko ob upoštevanju vseh previdnostnih ukrepov namesto generatorja izmeničnega toka uporabite omrežno napetost 220 voltov, tako da vir zaporedno povežete z navitji s 60-vatno svetilko.
Kako določiti začetke in konce sponk navitij elektromotorja?
Ko smo se naučili določiti način povezovanja navitij elektromotorja, je zvonjenje in označevanje koncev navitij povsem preprosto! Najprej morate poklicati tri pare sponk za navijanje. Upornost navitij močnih elektromotorjev je zelo majhna in znaša desetinke ohma, elektromotorji nizke moči pa enote ohmov. Sedma "telesna" žica se imenuje glede na telo. Preostalih 6 žic v nobenem primeru ne sme imeti stika z ohišjem. Upor med žicami navitja in ohišjem je na stotine megaohmov.
Torej, kot rezultat meritev, imamo tri pare navijalnih vodnikov in eno "telesno" žico. Zdaj pa naključno označimo zaključke (konce) katerega koli navitja s črkama "H" in "K" - začetek in konec. Nato, prav tako poljubno, označimo zaključke katerega koli drugega navitja s črkama "H" in "K" - začetek in konec.
 |
Naslednji korak je zaporedno povezovanje dveh označenih navitij med seboj s priključkoma »H« in »K«, kot je prikazano na sliki 3. Na preostale proste konce povezanih navitij (»H« in »K« ) priključimo ampermeter na majhnem merilnem območju (mA ali celo μA). Na sponke neoznačenega navitja bomo na kratko priključili vir DC- 1,5 voltna baterija (element 316). Ampermeter mora pokazati napetostni skok. Če se to ne zgodi, povežite označena navitja med seboj s priključkoma "H" in "N", na prosta konca ("K" in "K" pa priključite mikroampermeter). Če ampermeter zazna val toka, zamenjajte napisa "H" in "K" na katerem koli navitju.
Lahko se zgodi, da ampermeter v nobenem primeru ne zazna napetostnega sunka ali pa je ta sunka zelo šibka. Ta znak označuje okvaro elektromotorja - medobraten kratek stik katerega koli navitja.
Nato odklopimo navitja, izklopimo vir napajanja in ponovno zaporedno povežemo oba navitja. Poleg tega povežemo kateri koli izhod neoznačenega navitja s priključkom "H" katerega koli označenega navitja. Na preostale proste konce zaporedno povezanih navitij (sponka "K" in neoznačen izhod) priključimo mikroampermeter, nastavljen na majhno merilno mejo. Vir napajanja na kratko priključimo na sponke preostalega označenega navitja. Naprava bi morala pokazati napetostni sunek.
Če se to ne zgodi, potem zamenjamo vodnike neoznačenega navitja v vezju. Na kratko ponovno priključite vir napajanja. Če mikroampermeter zazna napetostni sunek, označimo (označimo) priključek neoznačenega navitja, ki je bil priključen na priključek "H", s črko "K", drugi priključek pa s črko "N". Vse!
Pri merjenju toka ali napetosti ni priporočljivo uporabljati digitalnega multimetra, saj obstoječa zakasnitev merjenja (indikacije) v digitalnih instrumentih morda ne bo imela časa za zaznavanje kratkotrajnih sunkov toka (napetosti).
Priključitev navitij trifaznega elektromotorja po diagramu trikotnika
Nič ni enostavnejšega kot povezati že označene kable motorja v trikotnik! Navitja povežemo zaporedno (v obroč) v tem vrstnem redu: začetek enega ("H") do konca drugega ("K"). Dobimo tri izhode elektromotorja, katerega navitja so povezana v trikotnik. Dodali jim bomo še eno "telesno" žico za povezavo z zunanjo ozemljitveno zanko
Klasičen način priključitev trifaznega elektromotorja na enofazno omrežje
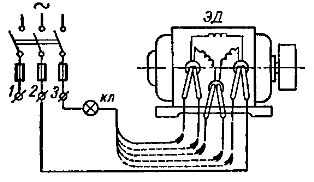
Najenostavnejši in najpogostejši diagram za priključitev trifaznega elektromotorja na enofazni 220-voltni vir energije je prikazan na sliki 1.
 |
Obstajajo metode za izračun vrednosti kapacitivnosti faznega kondenzatorja C1, vendar velikega pomena ne bi smeli imeti nobene teže, saj ti izračuni vodijo do skoraj enakih rezultatov, kot jih dobimo s približnim izračunom zmogljivosti z uporabo naslednje preproste formule.
Kjer je C zmogljivost faznega kondenzatorja v mikrofaradih, P pa nazivna moč elektromotorja v kilovatih. Velikost zmogljivosti je močno odvisna od načina delovanja elektromotorja, predvsem od njegove obremenitve.
V primerih, ko elektromotor deluje pod spremenljivimi obremenitvami, je potrebno med obratovanjem vklopiti dodatne, vzporedno s stalno priključenim faznopremičnim kondenzatorjem. Zgoraj navedeno formula za izračun deluje za manj obremenjene elektromotorje. Pod znatnimi obremenitvami je treba kapaciteto faznega kondenzatorja podvojiti od izračunane vrednosti.
Kaj se zgodi, če je vrednost kondenzatorja izbrana napačno?
Če je vrednost faznega kondenzatorja izbrana večja od tiste, ki je potrebna za specifične pogoje delovanja elektromotorja, se motor hitro pregreje. Če je vrednost kapacitivnosti izbrana manjša od zahtevane, se bo moč elektromotorja zmanjšala v primerjavi z optimalno. Od tod zaključek: pri izbiri faznega kondenzatorja morate začeti izbirati vrednost kapacitivnosti od najmanjše in jo postopoma povečevati do vrednosti, ko lahko elektromotor zagotovi mehansko delovanje pogona.
Zakaj mora biti delovna napetost faznega kondenzatorja vsaj 400 voltov?
Obstajajo trije razlogi, zakaj mora biti delovna napetost faznega kondenzatorja vsaj 400 voltov. Prvi razlog je, da je vrednost amplitude izmenične napetosti v gospodinjsko omrežje 220 voltov je skoraj tristo voltov (220x1,3). Zakaj je temu tako? Kot se spomnimo iz šolski tečaj fizike je gospodinjska izmenična napetost 220 voltov trenutno napetost.
Po definiciji: efektivna vrednost izmeničnega toka je tisti enosmerni tok, ki proizvede enako moč kot izmenični tok v istem času in pri isti obremenitvi.
In ker ima izmenični tok ekstreme - točke z največjimi in najmanjšimi vrednostmi, se bodo seveda razlikovale od neke povprečne (efektivne) vrednosti. Zagotoviti je treba, da fazni premični kondenzator vzdrži ta področja povečanih negativnih in pozitivnih napetosti.
Drugi razlog je, da je delovna napetost na kondenzatorjih običajno določena za enosmerni tok. Toda izmenična napetost sčasoma spremeni svojo polarnost od + 220 voltov do - 220 voltov. To pomeni, da je v nekaterih pogojih mogoče kondenzator napolniti do skoraj dvojne omrežne vrednosti, do 400 voltov.
Tretji razlog je, da je v tokokrogu statorskih navitij nameščen fazni kondenzator, ki ima visoko induktivnost. Pri delovanju elektromotorja, predvsem pri zagonu in zaustavitvi, se na navitjih sprosti velika elektromotorna sila samoindukcije (EMS) v obliki izbruhov. visoka napetost 300-600 voltov, ki se nanašajo posebej na kondenzator.
Kako izbrati optimalna zmogljivost fazni kondenzator?
Izbira optimalne vrednosti zmogljivosti faznega kondenzatorja je treba izvesti v dejanskih pogojih delovanja elektromotorja, tako da nanj priključite električni pogon in priključite efektivno začetni krog
. Celoten postopek se zmanjša na izbiro faznega kondenzatorja s takšno kapaciteto, da se velikosti tokov, ki tečejo v vsako od treh pip navitij elektromotorja, med seboj minimalno razlikujejo. Vrstni red izbire je enak kot je navedeno zgoraj - od najmanjše do največje zmogljivosti. Pri izbiri optimalne kapacitete kondenzatorja kontrolirajte in upoštevajte segrevanje ohišja motorja!
Zakaj se elektromotor ne sme pregrevati?
Med delovanjem se kateri koli električni motor neizogibno segreje. Temperatura ohišja delujočega motorja brez poškodb operativne značilnosti lahko doseže 70 °C. Za preprečevanje pregrevanja je ohišje motorja rebrasto, da se poveča površina, ki odvaja toploto. Učinkovitost odvajanja toplote kontaminiranega ohišja motorja se močno zmanjša.
Kaj se zgodi, ko se elektromotor pregreje? Prevleka izolacijskega laka navitih žic se posuši (ali celo zoglene) in odlušči. Posledično pride do kratkega stika izpostavljenih sosednjih žic. V navitju motorja pride do medobratnega kratkega stika.
Medobratni kratek stik, odvisno od velikosti zaprtega odseka, vodi bodisi do poznejšega hitrega pregrevanja elektromotorja bodisi do trenutnega taljenja (kratkega stika ali izgorevanja) žic navitja. V praksi elektromotor z mostom majhno območje navitij (več sosednjih ovojev), pregrevanja in izgube moči, lahko še vedno deluje. Toda vsak nov cikel - pregrevanje navitij med delovanjem in hlajenje med zaustavitvijo - poslabša stanje izolacije navitij in vodi do enakega rezultata - luščenje izolacije, kratek stik zavojev navitij in odpoved elektromotorja.
Poleg tega se pri pregrevanju elektromotorja pregrejejo ležaji, v katerih se vrti rotor. Pregrevanje ležajnega maziva povzroči zmanjšanje njegove učinkovitosti in še večje pregrevanje ležaja. Zaradi tega močno segreto mazivo delno izhlapi, delno izteče iz ohišja ležaja in ležaj se začne zatikati. Prisilna zaustavitev elektromotorja med delovanjem (brez izklopa) vodi tudi do hitrega in nesprejemljivega pregrevanja njegovih navitij in celo njihovega požara in odpovedi elektromotorja.
Kako spremeniti smer vrtenja rotorja elektromotorja?
Tako kot takrat, ko električni motor deluje iz trifaznega vira, ko se napaja iz enofazno omrežje napetost 220 voltov, rotor elektromotorja poganja vrteči se magnetno polje, katerega smer vrtenja je odvisna od vrstnega reda menjave faz. Ko elektromotor deluje, je en konec faznega kondenzatorja vedno priključen na prosto priključno točko navitij, drugi konec pa na napajalno žico - fazno ali nevtralno.
 |
Smer vrtenja rotorja elektromotorja je odvisna od tega, kje je priključen konec faznega kondenzatorja, ki je priključen na omrežno napajalno žico. Preprosto, za spremembo smeri vrtenja rotorja elektromotorja je treba ta priključek kondenzatorja odklopiti od ene napajalne žice in priključiti na drugo napajalno žico. Z drugimi besedami, ponovno priključite izhod iz sponke A elektromotorja na sponko B.
Diagram zagona trifaznega elektromotorja pri delovanju v enofaznem omrežju
Trifazni elektromotor deluje normalno, če je priključen na enofazni izmenični vir napajanja z gospodinjsko napetostjo 220 voltov. sheme prikazano na slikah 1 in 2. Vendar ga ne bo mogoče zagnati pod obremenitvijo. Da bi zagotovili vrtenje rotorja elektromotorja med zagonom, je potrebno posebno vezje. V skladu s to shemo je med zagonom vzporedno s faznim kondenzatorjem (C1) povezan dodatni "zagonski" kondenzator C2 s približno enako kapacitivnostjo kot fazni kondenzator. Takšen diagram je prikazan spodaj na sliki 3.
 |
Pri zagonu, po vklopu stikala SA, morate ročno pritisniti gumb SB in ga držati pritisnjenega nekaj sekund, dokler hitrost rotorja motorja ne doseže 70% nazivne.
Priključitev elektromotorja na omrežje preko kontaktorja, gumbov za zagon in izklop
V primeru okvar, izrednih razmer in izpada omrežne napetosti je treba elektromotor hitro in enostavno izklopiti. Poleg tega pri ponovnem vklopu električne energije, da se izognete poškodbam ljudi električni udar Da preprečite poškodbe električnega pogona in samega elektromotorja, se elektromotor ne sme samodejno ponovno zagnati.
Vse te zahteve izpolnjuje vezje za vklop elektromotorja s kontaktorjem K1. Motor se zažene s pritiskom na gumb "Start". Naknadna zaustavitev se izvede s pritiskom na gumb "Stop". Takšen diagram je prikazan spodaj na sliki 4.
 |
Za vklop elektromotorja pritisnite tipko SA1 "Start". Na navitje kontaktorja K1 se napaja omrežna napetost 220 voltov. Jedro kontaktorja se umakne in zapre kontakte K1.1 in K1.2. Kontakti gumba "Start" so samozaporni s kontakti K1.1, kontakti K1.2 pa povezujejo navitja motorja z omrežjem.
Ko pritisnete gumb "Stop", se tokokrog navitja kontaktorja K1 odpre in navitje se izklopi. Kontakti K1.1 so odprti, gumb "Start" je odklenjen. Kontakti K1.2 se odprejo in napetost se odstrani iz navitij motorja. Motor se ugasne. Stanje vezja se ne spremeni niti po sprostitvi gumba Stop. Elektromotor ostane izklopljen.
Shema samodejni zagon trifazni elektromotor
V diagramu sl. 4, tako kot v prejšnjih diagramih, morate ročno pritisniti gumb SA3, priključiti začetni kondenzator C2 in počakati, da rotor elektromotorja doseže hitrost, kar ni zelo priročno. Namesto ročnega gumba lahko uporabite zagonsko vezje, ki uporablja zakasnitveni rele, z določenim časom zakasnitve vklopa (po dovajanju napetosti) 3-10 sekund. Diagram za zamenjavo ročnega gumba z avtomatskim je prikazan spodaj na sliki 5.
 |
Ko je elektromotor vklopljen, se pritisne tipka SA1 "Start". Omrežna napetost 220 voltov pride do navitja kontaktorja K1. Jedro kontaktorja se umakne in zapre kontakte K1.1 in K1.2. Kontakti K1.1, kot v prejšnjem diagramu, samoblokirajo gumb "Start" (njegovi kontakti so premoščeni), kontakti K1.2 pa povezujejo navitja motorja z omrežjem. V tem času je zagonski kondenzator C2 priključen preko normalno zaprtih kontaktov zakasnitvenega releja KT1.1 vzporedno s faznim kondenzatorjem C1.
Hkrati z dovodom napetosti na kontaktor K1 se napajalna napetost dovaja na zakasnilni rele KT. Začne se odštevanje časa zakasnitve za odpiranje normalno zaprtih kontaktov KT1.1 releja KT. Po nekaj sekundah zakasnitve se aktivira rele KT, ki odpre kontakte KT1.1. Začetni kondenzator C2 je odklopljen od faznega kondenzatorja C1. Postopek zagona je končan.
Priključitev začetnega kondenzatorja prek močnih kontaktov
Priključitev zagonskega kondenzatorja vzporedno s faznim kondenzatorjem spremlja močno iskrenje kontaktov. Kontakti nizke moči zakasnitvenega releja K1, kot je prikazano na prejšnjem diagramu, ne bodo mogli zagotoviti dolgoročnega delovanja elektromotorja v načinu zagona. Enostavno se bodo zlepile ali pregorele. Zato je priporočljivo nadzorovati povezavo zagonskega kondenzatorja s kontakti močnega releja (kontaktorja). Takšen diagram je prikazan na sliki 6.
 |
Ko pritisnete gumb "Start", se napetost na enak način uporablja za zakasnilni rele KT1. Toda ob zagonu se bo začetni kondenzator C2 takoj povezal s faznim kondenzatorjem prek kontaktov dodatnega kontaktorja K2, katerega navitje bo ob zagonu priključeno na 220-voltno omrežje prek normalno zaprtih kontaktov. zakasnitvenega releja KT1.
Ko se časovna zakasnitev releja KT1 konča, se vklopi in njegovi kontakti KT1.1 se odprejo, pri čemer se navitje kontaktorja K2 odklopi od vira 220 voltov. Navitje kontaktorja K2 se bo izklopilo, njegovi kontakti K2.1 se bodo odprli in odklopili začetni kondenzator C2 od faznega kondenzatorja C1, s čimer se bo zaključil postopek zagona.
Tokovna zaščita trifaznega elektromotorja
V zgornjih diagramih je navitje elektromotorja stalno priključeno na 220-voltno omrežje, kar ustvarja nevarnost električnega udara za ljudi in ne izpolnjuje varnostnih zahtev. Po končanem delu mora biti električno orodje popolnoma izklopljeno. Na nobenem delu električne opreme ne sme biti smrtno nevarna napetost 220 voltov.
Poleg tega je treba električni motor zaščititi pred resnimi poškodbami, ko kratkih stikov tokokrogov ali komponent električnega motorja, ki prevajajo tok. Za zaščito zunanje električne napeljave pred kritičnimi in zasilnimi tokovi je potrebna tudi tokovna zaščita. Takšno zaščito lahko uspešno izvede trifazni trenutni stroj. Diagram za priključitev elektromotorja skozi tokovni odklopnik je prikazan na sliki 7.
Ko je tokovni odklopnik SA3 vklopljen, sveti modra LED VL1.1. Ko se elektromotor zažene in deluje, sveti rdeča LED VL1.2 (desna na diagramu), modra LED pa ugasne. Upori R1 in R2, vsak z nazivno močjo 1 vat, omejujejo tok skozi LED na 4 miliampere. Diode VD1 in VD2 ščitijo LED diode pred razpadom zaradi povratne napetosti 220 voltov.