3-3. SILNIKI ELEKTRYCZNE Z ZWARCIEM NA SŁUPIE
Najbardziej popularny jest asynchroniczny silnik elektryczny ze zwartym zwojem na biegunie prosty typ samorozruchowy jednofazowy silnik elektryczny. Jego urządzenie pokazano na ryc. 3-5. Stojan w kształcie podkowy jest złożony z tłoczonych arkuszy stali elektrycznej 4.
Blachy są izolowane od siebie warstwą lakieru, aby uniknąć silnego nagrzewania stojana przez zmienny strumień magnetyczny, powodując pojawienie się prądy wirowe w rdzeniu silnika elektrycznego. Stojan ma tylko jedną cewkę 1, ale jest dwubiegunowy. Odległość pomiędzy nabiegunnikami jest równa szerokości cewki, dzięki czemu można ją nawinąć na maszynie bezpośrednio na izolowany rdzeń stojana. Zwoje cewki są odizolowane od rdzenia za pomocą tulei 3 i dwóch kołnierzy 2 wykonanych z tektury elektrycznej. Aby móc umieścić kołnierze na rdzeniu, znajdują się w nich szczeliny 14.
Nabiegunniki mają wytłoczone dwa otwory, w które wkładane są zamknięte zwoje. kabel miedziany 5, pokrywając w przybliżeniu jedną trzecią łuku biegunowego. W przestrzeniach pomiędzy nabiegunnikami wirnik jest przykryty bocznikami magnetycznymi, którymi są stalowe płytki 6 włożone w rowki nabiegunników.
Wirnik jest złożony z blach P i ma pośrodku otwór na wał 13. Miedziane pręty 8 są wbijane w rowki znajdujące się na obwodzie wirnika, które są przylutowane do końców wirnika. miedziane pierścienie 7. Zwykle wirniki klatkowe wykonywane z rowkami skośnymi o mniej więcej jedną podziałkę zęba.
Wirnik obraca się w dwóch łożyskach, którymi są mosiężne tuleje 10, umieszczone pomiędzy płytami 11. Kulista powierzchnia tulei umożliwia ich montaż wzdłuż osi wału, dlatego takie łożyska nazywane są samonastawnymi. Łożyska są smarowane olejem maszynowym i zasilane przez otwory w tulejach z filcowej podkładki 12 nasączonej olejem. Łożyska te są prostsze niż łożyska kulkowe i działają cicho.
Prąd przepływający przez cewkę wytwarza pulsujący strumień magnetyczny, którego część przenika przez zwarty zwój na biegunie. Zatem w silniku elektrycznym ze zwartym zwojem na biegunie występują dwa strumienie magnetyczne, przesunięte o pewien kąt. Tworzą wirujące pole magnetyczne. Z powodu nierówności obu przepływów wektor powstałego pola będzie się nie tylko obracał, ale także zmieniał swoją wielkość w różnych odstępach czasu. Dlatego koniec wektora będzie opisywał nie okrąg, ale elipsę. Jednak to wystarczy, aby poruszyć wirnik podczas uruchamiania.
Moment rozruchowy takiego silnika elektrycznego jest bardzo mały i wynosi 20-40% momentu znamionowego. Dlatego silniki elektryczne ze zwartym zwojem na biegunie stosuje się tylko tam, gdzie nie jest wymagany duży moment rozruchowy, na przykład w wentylatorach stołowych, magnetofonach, odtwarzaczach elektrycznych itp.
Aby zwiększyć moment obrotowy, pomiędzy końcówki biegunów wkłada się cienkie stalowe płytki 6, zwane bocznikami magnetycznymi. W rezultacie zwiększa się strumień magnetyczny objęty zwartą cewką, a pole magnetyczne zbliża się bardziej kołowo.
Przeciążalność silnika elektrycznego jest bardzo mała, a maksymalny moment obrotowy ledwo osiąga 1,2-krotność momentu znamionowego. Jeżeli obciążenie wału przekroczy ten moment, wirnik zatrzyma się. W odróżnieniu od innych typów silników elektrycznych, w stanie zwarcia prąd stojana nieznacznie wzrasta,
dlatego silnik elektryczny może przez długi czas być podłączone do sieci za pomocą stacjonarnego wirnika. Ta właściwość jest używana w niektórych obwodach. Ze względu na znaczne straty energii w zwartej cewce sprawność silnika elektrycznego nie przekracza 40%.
Silniki ze zwartymi zwojami na biegunie są nieodwracalne. Wirnik obraca się zawsze w kierunku zwoju, w którym następuje zwarcie, co pokazuje strzałka na ryc. 3-5.
3-4. SILNIKI ELEKTRYCZNE Z UZWOJENIEM URUCHAMIAJĄCYM
Najbardziej rozpowszechnione są jednofazowe asynchroniczne silniki elektryczne z uzwojeniami rozruchowymi, w których uzwojenia nie są skupione w postaci cewek, jak
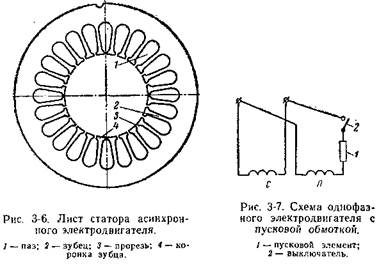
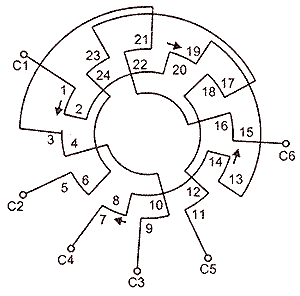
Na ryc. Rysunek 3-6 przedstawia arkusz stojana silnika elektrycznego z uzwojeniem początkowym. Na wewnętrznym obwodzie rozmieszczone są równomiernie rowki 1, pomiędzy którymi znajdują się zęby 2; przez nie strumień magnetyczny przechodzi od stojana do wirnika. Szczeliny 3 służą do wprowadzenia przewodów uzwojenia w rowki. Poszerzona część zęba 4 nazywana jest koroną.
Na ryc. Pokazano 3-7 Schemat obwodu jednofazowy silnik elektryczny z uzwojeniem rozruchowym. Takie silniki elektryczne mają dwa uzwojenia na stojanie - uzwojenie robocze C i uzwojenie początkowe P. Uzwojenie robocze zajmuje 2/3 żłobków, a uzwojenie początkowe 1/3. Dlatego całkowita liczba szczelin stojana musi być wielokrotnością trzech. Uzwojenie robocze pozostaje podłączone do sieci przez cały czas pracy silnika elektrycznego, a uzwojenie rozruchowe jest włączane dopiero wtedy, gdy wirnik przyspiesza w momencie rozruchu, a następnie wyłączane przełącznikiem 2, gdy wirnik osiągnie 70-80% nominalnej prędkości obrotowej. Jako wyłącznik stosuje się przyciski z ręcznym wyłączaniem lub automatyczne wyłączniki odśrodkowe, umieszczone na wirniku i przerywające obwód, gdy wirnik osiągnie prędkość obrotową powyżej 70% prędkości znamionowej. Obwód uzwojenia początkowego zawiera element początkowy 1, który najczęściej reprezentuje aktywny opór lub kondensator.
Tutaj musisz zapoznać się z koncepcją stopni elektrycznych, która często występuje w uzwojeniach maszyny elektryczne. Z geometrii wiemy, że okrąg dzieli się na 360°. Stopnie te nazywane są geometrycznymi lub przestrzennymi. Ponieważ stojan jest kołem, zawsze zawiera 360 stopni przestrzennych. Liczba stopni elektrycznych na obwodzie stojana może być równa 360 lub większej liczbie całkowitej. Jeśli na stojanie znajdują się dwa bieguny, liczba stopni elektrycznych również wynosi 360. Jeśli jednak na stojanie są cztery bieguny, to dla prądu elektrycznego 360°. powinniśmy wziąć część koła, na której znajduje się jeden biegun północny i jeden południowy. Ponieważ cały okrąg zajmuje cztery podziały biegunów, liczba stopni elektrycznych będzie dwukrotnie większa niż stopni przestrzennych. Zatem w uzwojeniu czterobiegunowym obwód stojana zawiera 720° prądu elektrycznego, w uzwojeniu sześciobiegunowym 1080° prądu elektrycznego. itp.
Z tego możemy wywnioskować główna zasadaże liczba stopni elektrycznych w okręgu jest równa 360 p, gdzie p jest liczbą par biegunów uzwojenia.
Aby zapewnić najlepsze cechy silnik elektryczny, muszą być spełnione następujące warunki:
1) uzwojenia robocze i rozruchowe muszą być umieszczone na obwodzie stojana pod kątem 90°;
2) wektory prądu w uzwojeniach roboczych i rozruchowych należy przesunąć o 1/4 okresu;
3) siły magnesujące w obu uzwojeniach muszą być równe, tj. Iloczyny prądów uzwojenia i liczba ich zwojów muszą być równe.
Wektory prądu uzwojenia roboczego i początkowego tworzą wirujące pole magnetyczne. Można to pokazać na poniższym schemacie (Rysunek 3-8). Przedstawmy prądy uzwojenia roboczego i początkowego jako dwie sinusoidy przesunięte o 1/4 okresu. Sinusoida prądów uzwojenia roboczego jest oznaczona literą C, a uzwojenie początkowe literą P. W różnych momentach wektory prądu będą pod różne kąty i dlatego będą musiały być złożone geometrycznie.
Okres fali sinusoidalnej uzwojenia początkowego dzielimy na 12 części i oznaczamy je liczbami na osi poziomej.
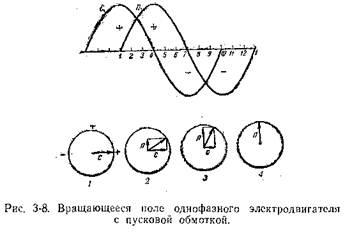
Dla każdego punktu na osi sinusoidy należy skonstruować okręgi, oznaczając je tymi samymi liczbami, co punkty na osi sinusoidy. Każde koło odpowiada jednej wartości prądu w uzwojeniu roboczym i początkowym. Narysujemy wektory pola utworzone przez prądy uzwojenia roboczego wzdłuż średnicy poziomej: dodatnie wartości pola znajdują się na prawo od środka okręgu, a wartości ujemne po lewej stronie. Narysujemy dodatnie wartości pól uzwojenia początkowego w górę wzdłuż średnicy pionowej, a ujemne - w dół.
Na ryc. Rysunek 3-8 pokazuje cztery okręgi dla punktów fali sinusoidalnej 1, 2, 3 i 4. Przekątne prostokątów są wektorami powstałego pola. Czytelnikom pozostawimy skonstruowanie okręgów i dodanie wektorów dla punktów 5, 6 i 7 itd. Porównanie wykresów kołowych pokazuje, że powstałe pole wiruje z częstotliwością synchroniczną. Powstałe pole będzie indukować prądy w uzwojeniu wirnika i zacznie się on obracać.
Wektory prądu uzwojenia roboczego i początkowego tworzą wirujące pole magnetyczne. Jeżeli wszystkie trzy wymienione powyżej warunki są spełnione, to koniec powstałego wektora pola opisuje okrąg, a pole nazywa się kołem. Ale jeśli przynajmniej jeden z wymienione warunki, wówczas wektor powstałego pola zmieni się pod względem wielkości, a pole magnetyczne nie będzie okrągłe, ale eliptyczne. Jednak nawet przy polu eliptycznym silniki elektryczne mogą mieć zadowalającą charakterystykę działania i rozruchu.
3-5. SILNIKI ELEKTRYCZNE Z REZYSTANAMI URUCHAMIANIA (REZYSTORAMI) I KONDENSATORAMI
Jak stwierdzono powyżej, musi nastąpić przesunięcie między wektorami prądu w uzwojeniu roboczym i początkowym, które musi być równe 1/4 okresu, aby utworzyć pole kołowe. Przesunięcie wektorów prądu można osiągnąć, jeśli rezystancja indukcyjna i czynna uzwojenia roboczego i rozruchowego są różne. Można tego dokonać włączając aktywny rezystor lub kondensator do obwodu uzwojenia rozruchowego.
Najbardziej rozpowszechnione są jednofazowe silniki elektryczne z rezystorem rozruchowym, który jest zamknięty w samym uzwojeniu rozruchowym. Takie silniki elektryczne nazywane są silnikami elektrycznymi z wbudowanym rezystorem. W przypadku tych silników elektrycznych uzwojenie robocze zajmuje % szczelin i ma wysoką reaktancję indukcyjną. Uzwojenie początkowe zajmuje tylko 1/3 żłobków stojana, ma mniejszą liczbę zwojów, a co za tym idzie, znacznie niższą reaktancję indukcyjną.
Aktywny opór uzwojenia początkowego musi być większy niż czynny opór uzwojenia roboczego. Dlatego jest nawinięty drutem o mniejszym przekroju. W silnikach elektrycznych pracujących z rzadkimi rozruchami przekrój początkowego drutu uzwojenia jest zmniejszony tak bardzo, że gęstość prądu w nim osiąga 40 A/mm 2, a czasem więcej. Aktywny opór nie może powodować przesunięcia między wektorami uzwojenia roboczego i początkowego równego 1/4 okresu, więc powstałe pole nie będzie okrągłe, ale eliptyczne. Pole eliptyczne można uznać za sumę dwóch nierównych pól kołowych wirujących w różnych kierunkach. Jeden z nich jest bezpośredni, tworząc moment obrotowy, a drugi jest odwrotny, tworząc moment hamujący. Odwrotne pole wirujące pogarsza właściwości rozruchowe i eksploatacyjne silnika elektrycznego.
W przypadku silników elektrycznych z wbudowanym rezystorem rozruchowym stosunek momentu rozruchowego do momentu znamionowego wynosi 1 -1,2, a stosunek prąd rozruchowy do nominalnej 6,5-9. Dlatego stosuje się je tam, gdzie nie są wymagane bardzo duże momenty rozruchowe (lodówki, pralki). Zakłady przemysłu elektrotechnicznego produkują silniki elektryczne z wbudowanym rezystorem rozruchowym typu AOLB w zakresie mocy od 18 do 600 W przy napięciach 127, 220 i 380 V, prędkościach obrotowych 3000 i 1500 obr/min (synchroniczne).
Do napędów o trudnych warunkach rozruchu stosuje się silniki elektryczne, w których jako element rozruchowy 1 zastosowano kondensator (patrz rys. 3-7). Te silniki elektryczne są oznaczone literami AOLG i mają te same dane nominalne, wymiary, masę i uzwojenia robocze, co silniki elektryczne typu AOLB. Mają różne uzwojenia początkowe i odpowiednio różne charakterystyki rozruchowe.
Jak wiadomo z elektrotechniki, włączenie kondensatora do obwodu prowadzi do tego, że prąd uzwojenia początkowego wyprzedza prąd uzwojenia roboczego. Za pomocą kondensatora można przesunąć prądy uzwojenia roboczego i rozruchowego o 90 o i w ten sposób wytworzyć przy rozruchu kołowe pole wirujące. Silniki elektryczne z kondensatorami rozruchowymi charakteryzują się dobrymi właściwościami rozruchowymi, tj. dużym stosunkiem momentu rozruchowego do momentu znamionowego (2-2,5) i niskim stosunkiem prądu rozruchowego (3-4 prąd znamionowy). Aby stworzyć duży Moment rozruchowy Nawet mały silnik elektryczny o mocy 50 W i napięciu 127 V wymaga kondensatora 40 µF. Wraz ze wzrostem napięcia pojemność kondensatora gwałtownie spada i przy napięciu silnika 220 V wynosi 15 μF.
W silnikach elektrycznych z uzwojeniami rozruchowymi po wyłączeniu tych uzwojeń 1/3 żłobków stojana pozostaje niewykorzystana. Dlatego takie silniki elektryczne mają zmniejszoną moc. W celu zwiększenia mocy stosuje się silniki elektryczne, w których uzwojenie rozruchowe pozostaje włączone. Aby wytworzyć przesunięcie prądu w uzwojeniach roboczych C i początkowych, w obwodzie tego ostatniego znajduje się kondensator (ryc. 3-9). Takie silniki elektryczne nazywane są silnikami kondensatorowymi, a uzwojenie rozruchowe wykorzystywane podczas pracy silnika elektrycznego nazywa się pomocniczym lub kondensatorowym i jest oznaczone literą B. W silnikach elektrycznych kondensatorowych oba uzwojenia zajmują tę samą liczbę szczelin. Za pomocą kondensatora można wytworzyć przesunięcie o 90° pomiędzy wektorami prądu w uzwojeniach.
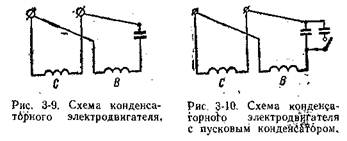
W ten sposób w silniku elektrycznym kondensatora przy mocy znamionowej powstaje pole kołowe. Dzięki temu silniki elektryczne kondensatorowe mają dobre właściwości: duża moc na wale, wysoka sprawność (60-75%) i wysoki współczynnik mocy (cos φ=0,8 0,95). Jednak moment rozruchowy takich silników elektrycznych jest niski. Zwykle nie przekracza 30% wartości nominalnej. Wyjaśnia to fakt, że podczas uruchamiania pole magnetyczne silnika elektrycznego będzie eliptyczne. Aby poprawić właściwości rozruchowe silnika elektrycznego w momencie rozruchu, równolegle z kondensatorem roboczym łączy się kondensator rozruchowy (ryc. 3-10). Zatem podczas rozruchu przesunięcie prądu odbywa się za pomocą dwóch kondensatorów - roboczego i rozruchowego, co zapewnia utworzenie okrągłego pola podczas uruchamiania. Po uruchomieniu silnika elektrycznego kondensator rozruchowy wyłącza się za pomocą przycisku lub przełącznika odśrodkowego.
Obecnie fabryki przemysłu elektrotechnicznego produkują kondensatorowe silniki elektryczne serii ABE, które charakteryzują się wysoką sprawnością, współczynnikiem mocy bliskim jedności oraz dobrymi właściwościami rozruchowymi i eksploatacyjnymi. Obejmują moce od 10 do 400 W przy prędkościach obrotowych 1000, 1500 i 3000 obr/min (synchroniczne) dla sieci 127 i 220 V.
Rodzaj silnika elektrycznego kondensatorowego to silnik elektryczny z masywnym wirnikiem wykonanym ze stali lub żeliwa, bez rowków i uzwojeń. Te silniki elektryczne mają wysoki moment rozruchowy. Prędkość obrotową można regulować w szerokim zakresie za pomocą reostatu w roboczym obwodzie uzwojenia i przy wszystkich prędkościach obrotowych od bezczynny ruch do pełnego obciążenia silnik elektryczny pracuje stabilnie. Silniki elektryczne z masywnym wirnikiem są proste w konstrukcji, niezawodne w działaniu i ciche. Taki silnik elektryczny można uzyskać z dowolnego silnika kondensatorowego, wymieniając jego wirnik.
Silniki elektryczne z masywnym wirnikiem ze względu na swoje właściwości użytkowe mogą zastąpić silniki elektryczne prądu stałego lub komutatora prądu stałego. prąd przemienny. Ze względu na duże straty w wirniku i rozproszenie magnetyczne mają niską sprawność i współczynnik mocy, dlatego są większe pod względem gabarytów i masy niż szczotkowe silniki elektryczne o tej samej mocy.
Silniki elektryczne z uzwojeniami rozruchowymi można odwrócić. Aby to zrobić, wystarczy zamienić końce uzwojenia roboczego lub początkowego.
3-6. SCHEMATY UZWOJENIA JEDNOFAZOWYCH SILNIKÓW ELEKTRYCZNYCH
Obwody uzwojenia są zbudowane dla rozproszonych uzwojeń stojana. Schematy pokazują przewody uzwojenia roboczego i rozruchowego oraz ich połączenia. Ponadto schematy wskazują, z których rowków wychodzą początki i końce uzwojenia roboczego i początkowego. Zaciski uzwojeń są oznaczone następującymi literami i cyframi: odpowiednio początek i koniec uzwojenia roboczego C1 i C2; odpowiednio początek i koniec uzwojenia początkowego P1 i P2.
W silnikach elektrycznych kondensatorów uzwojenie rozruchowe często nazywane jest pomocniczym, ponieważ pozostaje włączone przez cały czas pracy silnika elektrycznego, a jego zaciski wskazują: początek B1; koniec B2.
Uzwojenia stojana jednofazowych silników elektrycznych są jednowarstwowe i dwuwarstwowe. W pierwszym bok cewki zajmuje cały rowek, a wszystkie boki cewek leżące w rowkach tworzą jedną warstwę.
W uzwojeniach dwuwarstwowych boki dwóch cewek znajdują się w każdej szczelinie, oddzielone izolacyjną przekładką. Części cewek leżące w rowkach nazywane są rowkowanymi. Części cewek leżące poza rowkami nazywane są czołowymi.
Aby skonstruować schemat uzwojenia, musisz znać następujące dane stojana:

W przypadku uzwojeń jednowarstwowych podziałkę szczelin oblicza się za pomocą wzoru
Ten krok nazywa się średnicowym, ponieważ w maszynach dwubiegunowych boki cewki znajdują się w dwóch diametralnie przeciwnych szczelinach.
W uzwojeniach dwuwarstwowych zwykle stosuje się skrócony skok z następujących powodów. W każdym silniku elektrycznym prądu przemiennego oprócz sinusoidy głównej o okresie 1/50 s pojawiają się także sinusoidy o krótszych okresach, które nazywane są wyższymi harmonicznymi.

W jednofazowych i dwufazowych silnikach elektrycznych szczególnie silne działanie ma trzecia harmoniczna o okresie 1/150 s. Zakłóca to charakterystykę silnika elektrycznego. Powoduje to tzw. zapady na krzywej momentu obrotowego, przez co silnik elektryczny podczas rozruchu nie może osiągnąć prędkości znamionowej, lecz zatrzymuje się przy prędkości równej 1/3 prędkości znamionowej. Bardzo Skuteczne środki Walka z trzecią harmoniczną polega na skróceniu skoku uzwojenia o 1/3 podziału bieguna.
Z ryc. 3-11 widać, że przy skoku średnicowym boki cewki leżą pod środkami bieguna północnego i południowego oraz w utworzeniu e. ds. W grę wchodzi cały strumień magnetyczny na podział bieguna.
Na ryc. Rysunek 3-12 przedstawia położenie zwoju cewki ze skróconym skokiem o 1/3 podziału bieguna. Cewka nie obejmuje już całego podziału biegunów, a jedynie 2/3 podziału biegunów. Dlatego też indukowane w nim m.in. ds. będzie mniejszy niż w przypadku kroku diametrycznego, ale e. d.s. indukowane przez trzecią harmoniczną znoszą się wzajemnie. Zmniejszenie np. ds. w przypadku skrócenia skoku uwzględnia się to poprzez współczynnik skrócenia uzwojenia. W obliczeniach rozdz. 4 współczynnik ten wprowadza się do wzorów obliczeniowych.
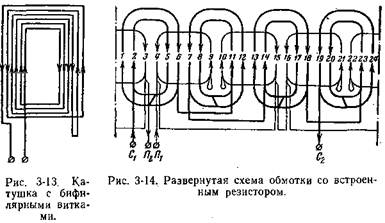
Najczęściej spotykane są silniki elektryczne z wbudowanymi rezystorami rozruchowymi. W przypadku takich silników elektrycznych konieczne jest uzyskanie dużej rezystancji czynnej uzwojenia bez zwiększania jego rezystancji indukcyjnej. Osiąga się to poprzez zastosowanie cewek o zwojach bifilarnych. Na ryc. Rysunek 3-13 przedstawia cewkę ze zwojami bifilarnymi. W tej cewce jest sześć zwojów i wszystkie z nich przyczyniają się do czynnego oporu cewki. Ale ostatnie dwa zwoje są nawinięte w przeciwnym kierunku. Gdy prąd przepływa przez zwoje cewki n.s. ostatnie cztery zwoje są wzajemnie kompensowane i tylko pierwsze dwa zwoje biorą udział w tworzeniu strumienia magnetycznego.
Na ryc. Rysunek 3-14 przedstawia schemat uzwojenia stojana z wbudowanym rezystorem. Stojan ma 24 żłobki, z czego 16 żłobków zajmuje uzwojenie robocze, a 8 żłobków zajmuje uzwojenie początkowe. Zarówno uzwojenie robocze, jak i rozruchowe mają cztery cewki. Jest to zatem czterobiegunowy silnik elektryczny o prędkości synchronicznej 1500 obr/min. Robocza strona cewki uzwojenia zajmuje dwie szczeliny, a strona cewki początkowej zajmuje jedną szczelinę. Na schemacie przewody leżące w rowkach są oznaczone pionowymi liniami. Numery rowków są wskazane w podziałach wierszy. Schemat przedstawia widok od wewnątrz obwodu stojana, który jest niejako przecięty i skręcony na płaszczyznę. Pewną trudnością w odczytaniu rozwiniętego obwodu jest to, że początek i koniec omiatania (szczeliny 1 i 24), które leżą obok siebie na stojanie, w rozłożonym obwodzie wydają się być odległe od siebie na całej długości obwodu , a przednia część jednej z cewek jest wycinana.
Czytając diagram, musisz w myślach prześledzić połączenia od końca diagramu do początku.
Rysując schemat, należy wybrać miejsce cięcia tak, aby wyciąć jak najmniejszą liczbę zwojów, a linia cięcia przebiegała symetrycznie względem zwojów.
Rozwinięty schemat wyraźnie pokazuje połączenia po obu stronach stojana, kierunek prądów i zmianę polaryzacji. Na tym schemacie założono kierunki prądów w uzwojeniu z zacisków C1 i P1. W częściach szczelinowych kierunek strzałek w górę i w dół dzieli uzwojenie na cztery strefy zgodnie z liczbą biegunów silnika elektrycznego. Ukośne linie na przednich częściach pokazują przejścia od jednej cewki biegunowej do drugiej.
Aby utworzyć zwoje bifilarne, każdą cewkę uzwojenia początkowego nawija się z dwóch cewek, a następnie jedną z nich obraca się o 180°. Tworzy to pętle widoczne w rowkach 9, 10, 21 i 22.
Procedurę sporządzania schematu i układania uzwojenia w rowkach określono w § 5-8.
Na ryc. Rysunek 3-15 przedstawia schemat uzwojenia stojana kondensatorowego silnika elektrycznego typu ABE. Jest to uzwojenie dwuwarstwowe i dlatego każdy rowek jest oznaczony na schemacie dwiema pionowymi liniami. Linia przerywana wskazuje stronę cewki leżącą na dole rowka, a linia ciągła wskazuje stronę cewki leżącą na dole. górę rowka. Całe uzwojenie składa się z symetrycznych cewek o tym samym rozstawie szczelin. Grube linie wskazują cewki uzwojenia roboczego, a cienkie linie wskazują uzwojenie początkowe (pomocnicze).
Stojan ma dwa bieguny. Średnica podziałki uzwojenia wzdłuż szczelin będzie wynosić z = 18/2 = 9. Oznaczałoby to, że pierwszą cewkę należy umieścić w slotach 1 i 10, gdyż 1+9=10.

Ze schematu widać, że cewka jest ułożona w rowkach 1 i 8. Oznacza to, że jest to uzwojenie o skróconym skoku. Wysokość dźwięku jest skrócona o podział na 2/9 biegunów, więc trzecia harmoniczna nie jest w pełni kompensowana.
Jak w każdym silniku elektrycznym kondensatorowym, każde uzwojenie zajmuje połowę żłobków stojana, czyli po dziewięć żłobków każde. Ale ponieważ dziewięć jest liczbą nieparzystą, uzwojenie robocze pierwszego bieguna zajmuje cztery szczeliny (1, 2, 3 i 4), a uzwojenie drugiego bieguna zajmuje pięć szczelin (10, 11, 12, 13 i 14).
Aby cewki uzwojenia roboczego i rozruchowego mogły zostać przesunięte elektrycznie o 90°, uzwojenie początkowe pierwszego bieguna zajmuje pięć żłobków (5, 6, 7, 8 i 9), a drugi biegun - cztery żłobki (15 , 16, 17 i 18). W fabrycznych silnikach elektrycznych należy uciekać się do asymetrycznego układu uzwojeń, aby przy różne liczby słupy.
Uzwojenia dwuwarstwowe wykonuje się w następujący sposób. W każdym uzwojeniu cewki jednego bieguna są połączone szeregowo i tworzą grupę cewek. Grupa ta jest nawinięta drutem ciągłym na szablon posiadający tyle rowków, ile rowków zajmuje bok cewki na stojanie. Cewki nawinięte umieszcza się w szczelinach izolowanych tulejami. Najpierw włóż dolne strony cewek, leżące na dnie rowków, a następnie górne.
Następnie zagina się końce tulei wystających z rowków i klinuje rowki klinami wykonanymi z tekstolitu lub twardego drewna.
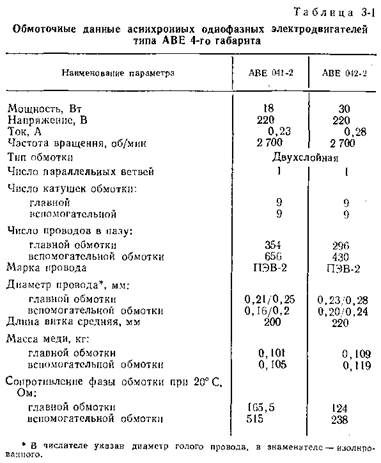
W tabeli 3-1 pokazuje dane uzwojeń silników, których uzwojenia są wykonane zgodnie z tym schematem. Są to silniki elektryczne czwartego rozmiaru o tej samej średnicy stojana, ale o różnej długości.
N.V. Winogradow, Yu.N. Winogradow
Jak samodzielnie obliczyć i wykonać silnik elektryczny
Moskwa 1974
Napięcia i obwody sieciowe uzwojenia stojana silnik elektryczny
Jeśli paszport silnika elektrycznego wskazuje np. 220/380 V, oznacza to, że silnik elektryczny można podłączyć zarówno do sieci 220 V (schemat podłączenia uzwojenia - trójkąt), jak i do sieci 380 V (schemat podłączenia uzwojenia - gwiazda). Uzwojenia stojana asynchronicznego silnika elektrycznego mają sześć końców.
Według GOST uzwojenia silnika asynchronicznego mają następujące oznaczenia: Faza I - C1 (początek), C4 (koniec), Faza II - C2 (początek), C5 (koniec), Faza III - C3 (początek), C6 (koniec).
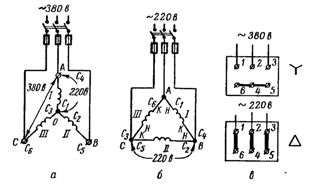
Ryż. 1. Schemat podłączenia uzwojeń silnika asynchronicznego: a - w gwiazdę, b - w trójkąt, c - wykonanie obwodów „gwiazda” i „trójkąt” na listwie zaciskowej.
Jeżeli napięcie w sieci wynosi 380 V, wówczas uzwojenia stojana silnika należy podłączyć w układzie gwiazdy. W wspólny punkt w tym przypadku zbierane są albo wszystkie początki (C1, C2, C3), albo wszystkie końce (C4, C5, C6). Pomiędzy końce uzwojeń AB, BC, CA przykładane jest napięcie 380 V. W każdej fazie, czyli pomiędzy punktami O i A, O i B, O i C, napięcie będzie √3 razy mniejsze: 380/√3 = 220 V.


Metody łączenia silników elektrycznych
Jeśli napięcie w sieci wynosi 220 V (przy systemie napięcia 220/127 V, którego obecnie prawie nigdzie nie można znaleźć), uzwojenia stojana silnika należy połączyć w trójkąt.
W punktach A, B i C początek (H) poprzedniego uzwojenia jest podłączony do końca (K) kolejnego uzwojenia i do fazy sieci (ryc. 1, b). Jeżeli przyjmiemy, że pomiędzy punktami A i B włączona jest faza I, pomiędzy punktami B i C - faza II, a pomiędzy punktami C i A - faza III, to w schemacie „trójkąta” łączy się: początek I (C1) z koniec III(C6), początek II (C2) z końcem I (C4) i początek III (C3) z końcem II (C5).
W niektórych silnikach końce faz uzwojenia są wyprowadzone na listwę zaciskową. Według GOST początki i końce uzwojeń są wyprowadzane w kolejności pokazanej na rysunku 1, c.
Jeżeli teraz konieczne jest połączenie uzwojeń silnika w układ gwiazdy, zaciski, do których wyprowadzone są końce (lub początki), są ze sobą zwarte, a fazy sieciowe są podłączane do zacisków silnika, do których dochodzą początki (lub początki). końcówki) są wyciągane.
Łącząc uzwojenia silnika w „trójkąt”, zaciski łączy się pionowo parami, a fazy sieci podłącza się do zworek. Zworki pionowe łączą początek I z końcem fazy III, początek II z końcem fazy I i początek III z końcem fazy II.
Określając schemat połączeń uzwojeń, możesz skorzystać z poniższej tabeli:

Paszport silnika elektrycznego
Wyznaczanie dopasowanych zacisków (początków i końców) faz uzwojenia stojana.
Na zaciskach uzwojeń stojana silnika zwykle znajdują się standardowy zapis na metalowych pierścieniach zaciskowych. Jednakże te pierścienie zaciskane są tracone. Pojawia się wówczas potrzeba zdefiniowania spójnych wniosków. Odbywa się to w tej kolejności.
W pierwszej kolejności za pomocą probówki wyznacza się pary zacisków poszczególnych uzwojeń fazowych (rys. 2).
Ryż. 2. Oznaczanie uzwojeń fazowych za pomocą probówki.
Jeden z sześciu zacisków uzwojenia stojana silnika jest podłączony do zacisku sieciowego 2, a jeden koniec próbnika jest podłączony do drugiego zacisku sieciowego 3. Drugi koniec próbnika dotyka się naprzemiennie każdego z pozostałych pięciu zacisków uzwojenia stojana, aż lampka się zaświeci. Jeśli lampka się zaświeci, oznacza to, że dwa zaciski podłączone do sieci należą do tej samej fazy.
Należy upewnić się, że zaciski uzwojeń nie powodują zwarcia między sobą. Każda para końcówek jest oznaczona (na przykład poprzez zawiązanie jej w supeł).
Po ustaleniu faz uzwojenia stojana przystępujemy do drugiej części pracy - ustalenia dopasowanych wniosków, czyli „początków” i „końców”. Tę część pracy można wykonać na dwa sposoby.
1. Metoda transformacji. Lampka kontrolna jest włączona w jednej z faz. Pozostałe dwie fazy są połączone szeregowo i również obejmują sieć.
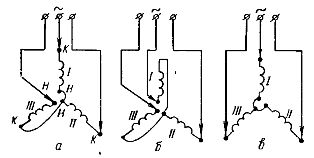
Jeśli te dwie fazy zostaną włączone w taki sposób, że w punkcie O warunkowy „koniec” jednej fazy zostanie połączony z warunkowym „początkiem” drugiej (ryc. 3, a), wówczas nuta magnetyczna ∑Ф przecina trzecią uzwojenia i indukuje w nim pole elektromagnetyczne.
Lampka wskaże obecność pola elektromagnetycznego lekkim świeceniem. Jeśli ciepło nie jest zauważalne, jako wskaźnika należy użyć woltomierza ze skalą do 30–60 V.

Ryż. 3. Wyznaczanie początków i końców uzwojeń fazowych silnika metodą transformacji
Jeśli na przykład warunkowe „końce” uzwojeń spotkają się w punkcie O (ryc. 3, b), wówczas strumienie magnetyczne uzwojeń będą skierowane przeciwnie do siebie. Całkowity strumień będzie bliski zeru, a lampa nie będzie się świecić (woltomierz pokaże O). W takim przypadku należy zamienić zaciski należące do którejkolwiek z faz i ponownie włączyć.
Jeśli lampa jest nagrzana (lub woltomierz wskazuje napięcie), należy oznaczyć końce. Jeden z terminali spotykających się we wspólnym punkcie O otrzymuje etykietę oznaczoną H1 (początek fazy I), a drugi terminal jest oznaczony etykietą K3 (lub K2).
Tagi K1 i H3 (lub H2) umieszcza się na zaciskach znajdujących się we wspólnych węzłach (zawiązanych w pierwszej części pracy) odpowiednio z H1 i K3.
Aby określić dopasowane zaciski trzeciego uzwojenia, zmontuj obwód pokazany na rysunku 3, c. Lampę włącza się w jednej z faz z już zaznaczonymi zaciskami.
2. Sposób doboru faz. Tę metodę określania dopasowanych zacisków (początków i końców) faz uzwojenia stojana można zastosować w przypadku silników, które nie są duża moc- do 3 - 5 kW.
Ryż. 4. Wyznaczenie „początku” i „końca” uzwojenia poprzez wybór obwodu „gwiazdowego”.
Po ustaleniu zacisków poszczególnych faz łączy się je losowo w gwiazdę (jeden zacisk z fazy podłącza się do sieci, a drugi zacisk do wspólnego punktu) i silnik podłącza się do sieć. Jeśli wszystkie warunkowe „początki” lub wszystkie „końce” osiągną wspólny punkt, wówczas silnik będzie działał normalnie.
Ale jeśli jedna z faz (III) okaże się „odwrócona” (ryc. 4, a), wówczas silnik mocno szumi, chociaż może się obracać (ale można go łatwo spowolnić). W takim przypadku wnioski dowolnego z uzwojeń losowo (na przykład I) należy zamienić (ryc. 4, b).
Jeśli silnik ponownie buczy i słabo pracuje, należy ponownie włączyć fazę jak poprzednio (jak na schemacie a), ale drugą fazę - III (rys. 3, c).
Jeśli po tym silnik nadal brzęczy to tę fazę również należy ustawić jak poprzednio i zamienić fazę kolejną - II.
Kiedy silnik zaczyna normalnie pracować (ryc. 4, c), wszystkie trzy zaciski połączone ze wspólnym punktem należy oznaczyć w ten sam sposób, na przykład „końce”, a przeciwne - „początki”. Następnie możesz zbierać schemat działania określone w paszporcie silnika.

Istnieje trójfazowy silnik asynchroniczny, który nie ma listwy zaciskowej; wychodzi sześć końcówek przewodów, ale nie można rozgryźć wychodzącej wiązki. Spróbujmy wspólnie rozwiązać ten problem.
Przede wszystkim przydatność. Rezystancja jest normalna - nazywamy (znajdujemy) każde uzwojenie, możesz użyć tego samego megaomomierza, ale lepiej jest użyć omomierza. Jedno zdecydowano - musimy natychmiast zaznaczyć jego wnioski. Zrobimy to dla wszystkich trzech uzwojeń. Możesz oznaczyć go jak chcesz, jednak każdy pin musi mieć swoją nazwę, aby nie pomylić go z innym pinem.
Przykładowo zdefiniowałem pierwsze uzwojenie L1, jego końce oznaczyłem H1, K1. Dlaczego? Określimy początek i koniec uzwojeń stojana. Gdzie jest początek i gdzie jest koniec dla pierwszego, nie ma znaczenia. Najważniejsze, aby inni się z nią zgodzili. Dlatego w pierwszym uzwojeniu jeden zacisk jest oznaczony początkiem (H1), drugi - końcem (K1), aby nie przepisywać go później. Oznaczenie można wykonać za pomocą markera na batyście umieszczonym na drutach, można okleić taśmą prostą kartkę papieru, a następnie przerobić ją na batyst. Na papierze jest to jeszcze wygodniejsze, gdy trzeba powtórzyć oznaczenia. Ale możesz od razu umieścić rurkę z oznaczeniem na zaciskach H1, K1, wszystko jest gotowe.
Definiujemy L2, oznaczamy znalezione wnioski jako 2, 3. Dla trzeciego (L3) - liczby 4, 5.
Teraz faktycznie określimy początek i koniec uzwojeń silnika asynchronicznego. Postępuj zgodnie z sekwencją działań w następującej kolejności: 
- Podłączamy przewód o numerze 2 do zacisku K1 (rys. 1).
- Podłączamy woltomierz do pinów 4, 5, aby zmierzyć napięcie przemienne.
- Do przewodów H1, 3 podłączamy 220V, można mniej, ale tylko Napięcie prądu przemiennego.
- Zanotuj odczyt woltomierza i wyłącz napięcie.
- Zmieniamy ze sobą przewody 2, 3; podłącz napięcie, zapisz odczyt woltomierza.
Wskazuje znacznie wyższy odczyt woltomierza prawidłowe połączenie uzwojenia H1, K1 - 2, 3. Powiedzmy, że najwyższy odczyt był przy pierwszym połączeniu. Oznacza to, że pin 2 jest początkiem, a pin 3 końcem. Na koniec oznaczamy przewód 2 jako H2, a przewód 3 jako K2.
Dalej.
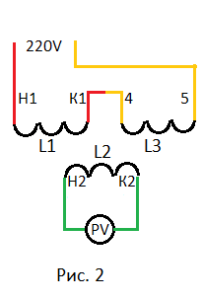
- Zamiast teraz H2, K2, podłączamy przewód 4 do K1, a woltomierz do H2, K2 (ryc. 2).
- Przykładamy napięcie do przewodów H1, 5. Zapisujemy odczyt.
- Wyłącz napięcie. Zmieniamy przewód 4 z przewodu 5. Włącz go. Wskazanie.
Załóżmy, że w drugim przypadku odczyt woltomierza był znacznie wyższy. Oznacza to, że przewód 5 jest początkiem L3 (oznaczony jako H3), przewód 4 jest końcem L3 (K3).
W ten sposób wyznaczono początek i koniec uzwojeń stojana silnika asynchronicznego.
Ważny część silniki elektryczne - ich uzwojenia, w których zachodzą główne procesy pracy polegające na przetwarzaniu energii. Do najpopularniejszych typów maszyn elektrycznych zalicza się:
uzwojenia trójfazowe maszyn prądu przemiennego, stosowane zwykle w stojanach trójfazowych maszyn asynchronicznych i synchronicznych, a także w wirnikach silniki asynchroniczne z pierścieniami ślizgowymi.
uzwojenia jednofazowe stojany asynchroniczne silniki jednofazowe z wirnikiem klatkowym.
uzwojenia tworników maszyn komutatorowych prądu przemiennego stałego i jednofazowego.
zwarte uzwojenia wirnika asynchroniczne silniki elektryczne.
uzwojenia wzbudzenia maszyn synchronicznych i komutatorowych.
Uzwojenia wzbudzenia maszyn synchronicznych i komutatorowych składają się z reguły ze stosunkowo prostych cewek biegunowych. Konstrukcja zwartych uzwojeń wirników silników asynchronicznych jest również prosta. Pozostałe typy uzwojeń wymienione powyżej są dość złożone systemy izolowane przewody umieszczone w szczelinach, połączone według specjalnych obwodów wymagających specjalnych badań.
Obrót uzwojeń:
Najprostszym elementem uzwojenia jest zwój, który składa się z dwóch połączonych szeregowo przewodów umieszczonych w rowkach, które zwykle znajdują się pod sąsiadującymi ze sobą przeciwległymi biegunami.
Przewody cewki leżące w rowkach są jej aktywnymi stronami, ponieważ to tutaj pole elektromagnetyczne jest indukowane z głównego pola magnetycznego maszyny. Części cewki znajdujące się na zewnątrz rowka, łączące ze sobą aktywne przewodniki i znajdujące się na końcach obwodu magnetycznego, nazywane są częściami czołowymi.
Przewodniki tworzące zwój mogą składać się z kilku równoległych drutów. Zwykle robi się to, aby uzwojenie było miękkie i łatwiej było wpasować się w rowki.
Jeden lub więcej zwojów połączonych szeregowo tworzy sekcję cewki lub uzwojenia. Jeśli sekcja składa się z jednego zwoju, wówczas takie uzwojenie nazywa się uzwojeniem prętowym, ponieważ w tym przypadku przewody umieszczone w rowkach zwykle reprezentują sztywne pręty. Uzwojenie składające się z sekcji wielozwojowych nazywa się uzwojeniem cewki.
Cewka uzwojenia:
Cewkę, czyli sekcję uzwojenia, charakteryzuje liczba zwojów wc i podziałka y, czyli liczba zębów obwodu magnetycznego, które pokrywa. I tak np. jeśli jedna strona cewki (przekroju) leży w pierwszym rowku, a druga w szóstym, to cewka zakrywa pięć zębów, a jej podziałka wynosi pięć (y = 5). Skok można zatem zdefiniować jako różnicę pomiędzy liczbą rowków, w których umieszczone są obie strony cewki (y = 6 – 1 = 5).
Często w krętych danych i literatura techniczna stopień jest oznaczony numerami rowków (zaczynając od pierwszego), w których ułożone są boki cewki, czyli w tym przypadku oznaczenie to wygląda następująco: y = 1 - 6.
Podziałkę uzwojenia nazywamy średnicową, jeśli jest ona równa podziałowi biegunów τ, czyli odległości między osiami sąsiednich przeciwległych biegunów, czyli tym samym liczbie rowków (zębów) na biegun. W tym przypadku y = τ = z/2p, gdzie z jest liczbą żłobków (zębów) rdzenia, w którym znajduje się uzwojenie; 2р - liczba biegunów uzwojenia.
Jeżeli podziałka cewki jest mniejsza niż podziałka średnicowa, nazywa się ją skróconą. Skrócenie podziałki, charakteryzujące się współczynnikiem skracania ky = y / τ, jest szeroko stosowane w uzwojeniach stojana trójfazowych asynchronicznych silników elektrycznych, ponieważ oszczędza to drut uzwojenia (ze względu na krótsze części końcowe), ułatwia układanie uzwojenia i poprawia charakterystykę silników. Stosowane skrócenie stopniowe mieści się zwykle w przedziale 0,85 – 0,66.
W dwubiegunowej maszynie elektrycznej kąt środkowy, odpowiadający podziałowi biegunowemu, jest równy 180°. Chociaż w maszynach czterobiegunowych ten kąt geometryczny wynosi 90°, w maszynach sześciobiegunowych 60° itd., ogólnie przyjmuje się, że pomiędzy osiami sąsiednich przeciwległych biegunów we wszystkich przypadkach kąt ten wynosi 180 stopni elektrycznych ( 180 stopni elektrycznych). Inaczej mówiąc, podział biegunów τ = 180 el. grad
Wyróżnia się uzwojenia jednowarstwowe, w których każda szczelina jest zajęta przez bok jednej cewki (sekcji) oraz uzwojenia dwuwarstwowe, w których boki różnych cewek (odcinków) są umieszczone w dwóch warstwach w szczelinach.
Sposoby przedstawiania uzwojeń:
Metody przedstawiania uzwojeń maszyn elektrycznych są dość konwencjonalne i oryginalne. Uzwojenia zawierają duża liczba przewodników i prawie niemożliwe jest przedstawienie wszystkich połączeń i przewodów na rysunku. Dlatego musimy uciekać się do przedstawiania uzwojeń w formie diagramów.
Stosują głównie dwie główne metody przedstawiania uzwojeń na schematach.
W pierwszym sposobie cylindryczna powierzchnia rdzenia wraz z uzwojeniem (a w maszynach komutatorowych wraz z komutatorem) jest jakby cięta mentalnie wzdłuż tworzącej i rozkładana na płaszczyznę rysunkową. Ten typ obwodu nazywany jest obwodem rozszerzonym lub przemiatającym (ryc. 2.1).
Ryż. 2.1. Rozszerzony schemat trójfazowego jednowarstwowego uzwojenia koncentrycznego o z = 24, 2р = 4.
W drugim sposobie uzwojenie rzutuje się na płaszczyznę prostopadłą do osi rdzenia, pokazując widok uzwojenia od końca (w przypadku maszyn komutatorowych zwykle od strony komutatora). Przewodniki (lub aktywne strony sekcji i cewek) umieszczone w rowkach na powierzchni rdzenia są przedstawione w okręgach i pokazują końcowe (przednie) połączenia uzwojenia. Jeśli to konieczne, zobrazuj nie tylko końcowe połączenia uzwojenia widoczne z tej strony, ale także te znajdujące się od Odwrotna strona rdzeń ma niewidoczne części czołowe, a ich obraz w tym przypadku jest wyjęty poza obwód rdzenia. Schematy tego typu nazywane są końcowymi lub okrągłymi (ryc. 2.2).

Ryż. 2.2. Schemat uzwojenia końcowego m = 3, z = 24, 2р = 4.
Schematy uzwojeń końcowych i rozłożonych:
Najpopularniejsze schematy to te wykonane pierwszą metodą. Są łatwiejsze do odczytania i bardziej wizualne. Aby ułatwić odczytanie i wykonanie diagramów końcowych, wykonano je w sposób uproszczony (rys. 2.3). Ale nawet po tym, dla wrappera, który nie ma wystarczającego doświadczenia w pracy z obwodami końcowymi, wydają się one niezrozumiałe i trudne do odczytania. Na rozbudowanych schematach rozmieszczenie cewek i grup cewek, połączenie cewek i grup cewek wygląda bardziej realistycznie i zrozumiałe.
Ryż. 2.3. Zakończ obwód za pomocą 2p = 4, a = 1.
Schematy dają dość jasne wyobrażenie o budowie i rozmieszczeniu wszystkich elementów uzwojenia oraz połączeń między nimi na rdzeniu. Schematy przedstawiają głównie tylko przewody uzwojenia, starając się, jeśli to możliwe, pominąć wszystkie inne szczegóły, które zaśmiecają schemat i utrudniają jego odczytanie. Niezbędne dodatkowe dane techniczne podano na schematach w formie napisów.
Cewka lub sekcja na schemacie jest przedstawiona jako jedna linia, niezależnie od tego, czy jest nawinięta na jeden drut, czy na kilka równoległych drutów, składa się z jednego zwoju czy jest wielozwojowa. Na rozwiniętym schemacie sekcja lub cewka jest przedstawiona jako figura zamknięta, przypominająca rzeczywistą konfigurację sekcji (cewki), z której odchodzą przewody.
W rozszerzonych dwuwarstwowych obwodach uzwojenia boki cewek lub sekcji leżą bliżej szczeliny powietrznej, tj. najwyższa warstwa rowki zaznaczono liniami ciągłymi, a boki leżące w dolnej warstwie – liniami przerywanymi. Czasami (w książkach starszych wydań) aktywne strony cewek w obu warstwach rowka są przedstawiane liniami ciągłymi, ale te strony, które leżą w górnej warstwie, są umieszczane po lewej stronie, a te, które leżą w dolnej warstwie są umieszczony po prawej stronie.
Na schematach trójfazowych uzwojeń drutów różne fazy można przedstawić za pomocą linii różniących się od siebie, na przykład linii ciągłych, przerywanych i przerywanych różne kolory lub różnej grubości, podwójne linie z różnym cieniowaniem pomiędzy nimi.
Na schematach zwykle podaje się numery żłobków, numery płyt kolektorów, numery sekcji i ich boków, numery i oznaczenia końcówek wyjściowych grup cewek, fazy uzwojenia, kierunki prądów, strefy fazowe, pola magnetyczne można również wskazać słupy polowe itp. (ryc. 2.4 - 2.6).

Ryż. 2.4. Rozszerzony schemat uzwojenia dwuwarstwowego przy z = 24, 2р = 4, q = 2.
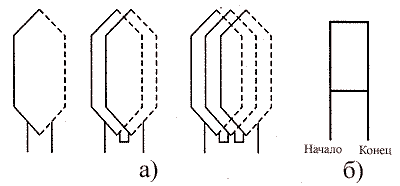
Ryż. 2.5. Reprezentacja grup cewek na schematach: a - rozszerzona, b - warunkowa.

Ryż. 2.6. Diagramy warunkowe dwuwarstwowe uzwojenie stojana: a - dla trzech faz przy 2p = 2; b - dla jednej fazy przy 2p = 2, c - dla jednego uzwojenia stojana przy 1p = 4.
Schematy są niezbędne nie tylko przy badaniu zasady działania uzwojeń, ich konstrukcji, właściwości i cech, ale także przy wykonywaniu prac uzwojeń. Bez schematu i bez sprawdzenia go w trakcie pracy trudno jest dokończyć uzwojenie, dlatego przed przystąpieniem do naprawy uzwojenia należy sporządzić schemat lub znaleźć podobny w podręczniku.
Uproszczone schematy końcowe:
Należy zauważyć, że kompletne schematy obwodów rozwiniętych i końcowych złożonych uzwojeń wielobiegunowych z duża liczba Rowki są bardzo nieporęczne i trudne do odczytania.
W takich przypadkach w procesie wykonywania uzwojeń, których elementy się powtarzają, często stosuje się praktyczne szczegółowe schematy, gdzie na przykład pokazana jest tylko jedna faza (czasami część fazy). uzwojenie trójfazowe lub kilka sekcji uzwojenia maszyna kolekcjonerska. Powszechnie stosowane są również uproszczone schematy końcowe, gdzie całe grupy cewek są przedstawiane jako część łuku z oznaczeniami zacisków, a mniejsze elementy uzwojenia nie są przedstawiane lub są przedstawiane osobno na schemacie. Uproszczone obwody końcowe są wygodne przy wykonywaniu połączeń między grupami cewek w złożonych uzwojeniach.
Wyznaczanie początku i końca uzwojeń silnika trójfazowego.
Czasem zdarzają się trójfazowe silniki elektryczne, w których z reguły nie zaznacza się końcówek uzwojeń po przewinięciu lub przy zbyt „ostrożnym użytkowaniu”. Aby określić początek i koniec uzwojeń, musisz:
- za pomocą omomierza określić uzwojenia, zaznaczyć trzy pary - trzy uzwojenia;
- zaznacz jeden przewód na jednym z uzwojeń i podłącz do niego ujemny akumulator;
- podłączyć woltomierz wskaźnikowy do drugiego uzwojenia;
- dotknij drugi przewód pierwszego uzwojenia do dodatniego bieguna akumulatora i zobacz, w którą stronę odchyla się strzałka. Konieczne jest, aby pochylił się do przodu;
- po upewnieniu się, zaznacz zacisk podłączony do plusa woltomierza;
- podobnie sprawdź i zaznacz wyjście na trzecim uzwojeniu.
Oznaczone zaciski można uznać za początek lub koniec i odpowiednio podłączyć silnik do obwodu trójfazowego.
Określamy liczbę zacisków uzwojenia stojana silnika elektrycznego i ich przeznaczenie
Silnik elektryczny jest podłączony do źródła zasilania poprzez zaciski jego uzwojeń wewnętrznych. Takie uzwojenia silnik trójfazowy- trzy. W sumie zatem powinno być sześć wniosków. Ale spod pokrywy z reguły wychodzi siedem przewodów, jeden z nich to „obudowa” podłączona do obudowy silnika. Nie jest objęty schematem żywieniowym, ale jest niezbędny bezpieczną pracę.
Często zdarza się, że z obudowy silnika wychodzi tylko trzy przewody. W tym przypadku pozostałe trzy zaciski są „ukryte” wewnątrz obudowy i aby się do nich dostać, należy ostrożnie zdemontować silnik elektryczny, wyjmując wirnik. Po znalezieniu i odłączeniu trzech brakujących przewodów (połączonych ze sobą w gwiazdę) należy każdy z nich przedłużyć i wszystkie wyprowadzić.
Czasami przewody wewnątrz obudowy silnika nie są połączone gwiazdą (trzy w jednym miejscu), ale trójkątem. W tym przypadku zadanie jest trudniejsze, ale takie samo: odłączyć wszystkie (trzy pary) połączeń przewodów, wydłużyć końcówki i wyprowadzić je. To prawda, że w naszym przypadku nie warto tego robić, ponieważ podano tutaj wszystkie metody schematów połączeń dla silników elektrycznych, których uzwojenia są połączone w obwód trójkąta.
Zazwyczaj na pokrywie obudowy silnika elektrycznego instalowana jest skrzynka, która zawiera blok przełączający ze zworkami; dzięki ich konfiguracji można łatwo prześledzić schemat połączeń uzwojeń.
Jak ustalić, według jakiego obwodu są połączone końce uzwojeń silnika elektrycznego?
Jeżeli połączenia uzwojeń nie są widoczne wizualnie (połączenia wykonywane są wewnątrz obudowy silnika), wówczas rodzaj połączenia (gwiazda lub trójkąt) będzie musiał zostać określony pośrednio. W teorii jest to bardzo proste.
Schemat połączeń uzwojeń gwiazdowych silnika elektrycznego wykonuje się poprzez połączenie ze sobą trzech zacisków o tej samej nazwie (na przykład końcówek) w jednym punkcie. Jeśli zatem podłączymy generator prądu przemiennego do dowolnych dwóch zacisków (z trzech!) silnika elektrycznego, wówczas nie nastąpi transformacja napięcia na uzwojenie wtórne, dla którego do pomiarów wykorzystywane jest trzecie uzwojenie, a woltomierz podłączone jak pokazano na rys. 1 nie pokaże żadnego napięcia lub napięcie bliskie zeru woltów.
W praktyce zamiast alternatora można zastosować zwykły akumulator o napięciu półtora wolta (na przykład 316), podłączając go na krótko do zacisków silnika elektrycznego. W takim przypadku pomiarów napięcia należy dokonywać na minimalnej granicy skali woltomierza. Jeżeli silnik elektryczny ma dużą moc, należy zainstalować urządzenie do pomiaru prądu (mikroamperów).
W skrajnych przypadkach, zachowując wszelkie środki ostrożności, zamiast generatora prądu przemiennego można zastosować napięcie sieciowe 220 woltów, łącząc źródło z uzwojeniami szeregowo za pomocą 60-watowej lampy.
Jak określić początki i końce zacisków uzwojeń silnika elektrycznego?
Po tym jak nauczyliśmy się określać sposób łączenia uzwojeń silnika elektrycznego, dzwonienie i oznaczanie końcówek uzwojeń jest całkiem prostą sprawą! Najpierw musisz wywołać trzy pary zacisków uzwojenia. Rezystancja uzwojeń mocnych silników elektrycznych jest bardzo mała i wynosi dziesiąte części oma, a silników elektrycznych małej mocy - jednostki omów. Siódmy drut „ciała” nazywany jest w stosunku do ciała. Pozostałe 6 przewodów w żadnym wypadku nie powinno mieć kontaktu z obudową. Rezystancja pomiędzy drutami uzwojenia a obudową wynosi setki megaomów.
Zatem w wyniku pomiarów mamy trzy pary przewodów uzwojenia i jeden przewód „korpusu”. Teraz losowo zaznaczmy wnioski (końce) dowolnego uzwojenia literami „H” i „K” - początek i koniec. Następnie, również arbitralnie, oznaczamy wnioski z dowolnego innego uzwojenia literami „H” i „K” - początek i koniec.
 |
Kolejnym krokiem jest połączenie ze sobą dwóch oznaczonych uzwojeń szeregowo z zaciskami „H” i „K”, jak pokazano na rys. 3. Do pozostałych wolnych końcówek połączonych uzwojeń („H” i „K” ) podłączamy amperomierz nastawiony na mały zakres pomiarowy (mA lub nawet μA). Na krótko podłączymy źródło do zacisków nieoznakowanego uzwojenia prąd stały- Bateria 1,5 V (element 316). Amperomierz powinien pokazać skok napięcia. Jeśli tak się nie stanie, należy połączyć oznaczone uzwojenia ze sobą zaciskami „H” i „N”, a do ich wolnych końcówek („K” i „K”) podłączyć mikroamperomierz. Jeśli amperomierz wykryje wzrost prądu, zamień napisy „H” i „K” na dowolnym uzwojeniu.
Może się zdarzyć, że amperomierz i tak nie wykryje skoku napięcia lub skok ten jest bardzo słaby. Znak ten wskazuje na awarię silnika elektrycznego - zwarcie międzyzwojowe dowolnego uzwojenia.
Następnie odłączamy uzwojenia, wyłączamy źródło zasilania i ponownie łączymy oba uzwojenia szeregowo. Ponadto dowolne wyjście nieoznaczonego uzwojenia podłączamy do zacisku „H” dowolnego oznaczonego uzwojenia. Do pozostałych wolnych końcówek uzwojeń połączonych szeregowo (zacisk „K” i wyjście nieoznaczone) podłączamy mikroamperomierz nastawiony na małą granicę pomiaru. Na krótko podłączamy źródło zasilania do zacisków pozostałego zaznaczonego uzwojenia. Urządzenie powinno wykazywać skok napięcia.
Jeśli tak się nie stanie, zamieniamy przewody nieoznakowanego uzwojenia w obwodzie. Ponownie na krótko podłącz źródło zasilania. Jeżeli mikroamperomierz wykryje skok napięcia, oznaczamy (oznaczamy) zacisk nieoznakowanego uzwojenia, który został podłączony do zacisku „H”, literą „K”, a drugi zacisk literą „N”. Wszystko!
Podczas pomiaru prądu lub napięcia nie zaleca się stosowania multimetru cyfrowego, ponieważ istniejące opóźnienie pomiaru (wskazania) w przyrządach cyfrowych może nie wystarczyć na wykrycie krótkotrwałych skoków prądu (napięcia).
Łączenie uzwojeń trójfazowego silnika elektrycznego zgodnie ze schematem trójkątnym
Nie ma nic prostszego niż połączenie oznaczonych już przewodów silnika w trójkąt! Uzwojenia łączymy szeregowo (w pierścień) w następującej kolejności: początek jednego („H”) do końca drugiego („K”). Otrzymujemy trzy wyjścia silnika elektrycznego, którego uzwojenia są połączone w obwód trójkąta. Do nich dodamy kolejny przewód „korpusu”, aby podłączyć go do zewnętrznej pętli masy
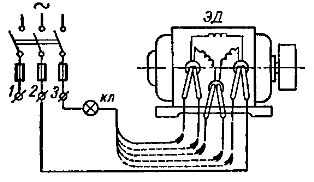
Klasyczny sposób podłączenie trójfazowego silnika elektrycznego do sieci jednofazowej
Najprostszy i najczęstszy schemat podłączenia trójfazowego silnika elektrycznego do jednofazowego źródła zasilania 220 V pokazano na rysunku 1.
 |
Istnieją metody obliczania wartości pojemności kondensatora z przesunięciem fazowym C1, ale wielkie znaczenie nie należy im przypisywać żadnej wagi, ponieważ obliczenia te prowadzą do prawie takich samych wyników, jakie można uzyskać, obliczając z grubsza pojemność za pomocą następującego prostego wzoru.
Gdzie C to pojemność kondensatora przesuwającego fazę w mikrofaradach, a P to moc znamionowa silnika elektrycznego w kilowatach. Wielkość pojemności silnie zależy od trybu pracy silnika elektrycznego, w szczególności od jego obciążenia.
W przypadkach, gdy silnik elektryczny pracuje pod zmiennymi obciążeniami, należy w trakcie pracy włączyć dodatkowe, równolegle z podłączonym na stałe kondensatorem przesuwającym fazę. Powyższe wzór obliczeniowy działa dla lekko obciążonych silników elektrycznych. Przy znacznych obciążeniach pojemność kondensatora przesuwającego fazę należy podwoić w stosunku do obliczonej wartości.
Co się stanie, jeśli wartość kondensatora zostanie wybrana nieprawidłowo?
Jeśli wartość kondensatora przesuwającego fazę zostanie wybrana większa niż wymagana dla określonych warunków pracy silnika elektrycznego, silnik szybko się przegrzeje. Jeśli wartość pojemności zostanie wybrana mniejsza niż wymagana, wówczas moc silnika elektrycznego zostanie zmniejszona w porównaniu z optymalną. Stąd wniosek: dobierając kondensator przesuwający fazę należy zacząć dobierać wartość pojemności od minimalnej, stopniowo ją zwiększając do wartości, w której silnik elektryczny będzie w stanie zapewnić mechaniczną pracę napędu.
Dlaczego napięcie robocze kondensatora przesuwającego fazę powinno wynosić co najmniej 400 woltów?
Istnieją trzy powody, dla których napięcie robocze kondensatora przesuwającego fazę powinno wynosić co najmniej 400 woltów. Pierwszym powodem jest to, że wartość amplitudy napięcia przemiennego w sieć domowa 220 woltów to prawie trzysta woltów (220 x 1,3). Dlaczego? Jak pamiętamy z kurs szkolny fizyki, napięcie prądu przemiennego w gospodarstwie domowym wynosi 220 woltów aktualny napięcie.
Z definicji: wartość skuteczna prądu przemiennego to taki prąd stały, który wytwarza taką samą moc jak prąd przemienny w tym samym czasie i przy tym samym obciążeniu.
A ponieważ prąd przemienny ma ekstrema - punkty o wartościach maksymalnych i minimalnych, będą one oczywiście różnić się od pewnej wartości średniej (skutecznej). Kondensator przesuwający fazę musi wytrzymać obszary zwiększonego napięcia ujemnego i dodatniego.
Drugim powodem jest to, że napięcie robocze na kondensatorach jest zwykle określane dla prądu stałego. Ale napięcie przemienne z czasem zmienia swoją polaryzację z + 220 woltów na - 220 woltów. Oznacza to, że w pewnych warunkach kondensator można naładować niemal dwukrotnie w stosunku do wartości sieciowej, aż do 400 woltów.
Trzecim powodem jest to, że w obwodzie uzwojeń stojana, które mają wysoką indukcyjność, zainstalowany jest kondensator przesuwający fazę. Podczas pracy silnika elektrycznego, zwłaszcza podczas jego uruchamiania i zatrzymywania, na uzwojeniach uwalniana jest duża elektromotoryczna siła samoindukcji (EMF) w postaci impulsów Wysokie napięcie Napięcie 300–600 woltów przyłożone specjalnie do kondensatora.
Jak wybrać optymalna pojemność kondensator przesuwający fazę?
Doboru optymalnej wartości pojemności kondensatora przesuwnego fazowego należy dokonać w rzeczywistych warunkach pracy silnika elektrycznego, podłączając do niego napęd elektryczny i podłączając moc skuteczną obwód rozruchowy
. Cała procedura sprowadza się do doboru kondensatora przesuwającego fazę o takiej pojemności, aby wielkości prądów wpływających do każdego z trzech zaczepów uzwojenia silnika elektrycznego różniły się od siebie minimalnie. Kolejność wyboru jest taka sama jak wskazano powyżej - od mniejszej do większej pojemności. Wybierając optymalną pojemność kondensatora, kontroluj i uwzględnij nagrzewanie się obudowy silnika!
Dlaczego silnik elektryczny nie powinien się przegrzewać?
Podczas pracy każdy silnik elektryczny nieuchronnie się nagrzewa. Temperatura obudowy pracującego silnika bez uszkodzeń charakterystyka operacyjna może osiągnąć 70°C. Aby zapobiec przegrzaniu, obudowa silnika jest żebrowana, co zwiększa powierzchnię odprowadzającą ciepło. Skuteczność usuwania ciepła z zanieczyszczonej obudowy silnika jest znacznie zmniejszona.
Co się stanie, gdy silnik elektryczny się przegrzeje? Powłoka lakieru izolacyjnego na drutach uzwojenia wysycha (lub nawet zwęgla) i odpada. W rezultacie odsłonięte sąsiednie przewody powodują zwarcie. W uzwojeniu silnika występuje zwarcie międzyzwojowe.
Zwarcie międzyzwojowe, w zależności od wielkości przekroju zamkniętego, prowadzi albo do późniejszego szybkiego przegrzania silnika elektrycznego, albo do chwilowego stopienia (zwarcia lub przepalenia) drutów uzwojenia. W praktyce silnik elektryczny z mostkiem mały obszar uzwojenia (kilka sąsiadujących zwojów), przegrzanie i utrata mocy, mogą nadal działać. Ale każdy nowy cykl - przegrzanie uzwojeń podczas pracy i ochłodzenie podczas wyłączania - pogarsza stan izolacji uzwojeń i prowadzi do tego samego rezultatu - złuszczenia izolacji, zwarcia zwojów uzwojenia i awarii silnika elektrycznego.
Ponadto, gdy silnik elektryczny się przegrzewa, łożyska, w których obraca się wirnik, przegrzewają się. Przegrzanie smaru łożyskowego prowadzi do zmniejszenia jego skuteczności i jeszcze większego przegrzania łożyska. W rezultacie mocno nagrzany smar częściowo odparowuje, częściowo wypływa z obudowy łożyska i łożysko zaczyna się zacinać. Awaryjne wymuszone zatrzymanie silnika elektrycznego podczas pracy (bez odłączania go od zasilania) prowadzi również do szybkiego i niedopuszczalnego przegrzania jego uzwojeń, a nawet ich pożaru i awarii silnika elektrycznego.
Jak zmienić kierunek obrotu wirnika silnika elektrycznego?
Podobnie jak wtedy, gdy silnik elektryczny zasilany jest ze źródła trójfazowego, gdy jest zasilany z sieć jednofazowa napięcie 220 woltów, wirnik silnika elektrycznego napędzany jest przez obrót pole magnetyczne, którego kierunek obrotu zależy od kolejności przemienności faz. Podczas pracy silnika elektrycznego jeden koniec kondensatora przesuwającego fazę jest zawsze podłączony do wolnego miejsca połączenia uzwojeń, a drugi koniec do przewodu zasilającego - fazowego lub neutralnego.
 |
Kierunek obrotu wirnika silnika elektrycznego zależy od tego, gdzie podłączony jest koniec kondensatora przesuwającego fazę, który jest podłączony do przewodu zasilającego. Najprościej, aby zmienić kierunek obrotu wirnika silnika elektrycznego, należy ten zacisk kondensatora odłączyć od jednego przewodu zasilającego i podłączyć do drugiego przewodu zasilającego. Innymi słowy, podłącz ponownie wyjście z zacisku A silnika elektrycznego do zacisku B.
Schemat rozruchu trójfazowego silnika elektrycznego podczas pracy w sieci jednofazowej
Trójfazowy silnik elektryczny działa normalnie po podłączeniu do jednofazowego źródła prądu przemiennego o napięciu domowym 220 woltów. schematy pokazano na rysunkach 1 i 2. Nie będzie jednak możliwe jego uruchomienie pod obciążeniem. Aby zapewnić obrót wirnika silnika elektrycznego podczas rozruchu, potrzebny jest specjalny obwód. Zgodnie z tym schematem podczas uruchamiania dodatkowy kondensator „rozruchowy” C2 o w przybliżeniu tej samej pojemności co kondensator przesuwający fazę jest podłączony równolegle z kondensatorem przesuwającym fazę (C1). Taki schemat pokazano poniżej na ryc. 3.
 |
Podczas uruchamiania, po włączeniu wyłącznika SA, należy ręcznie nacisnąć przycisk SB i przytrzymać go przez kilka sekund, aż prędkość obrotowa wirnika silnika elektrycznego osiągnie 70% wartości nominalnej.
Podłączenie silnika elektrycznego do sieci za pomocą stycznika, przycisków start i stop
W przypadku awarii, sytuacji awaryjnych i utraty napięcia sieciowego silnik elektryczny należy wyłączyć szybko i łatwo. Ponadto podczas przywracania zasilania, aby uniknąć obrażeń ciała wstrząs elektryczny Aby zapobiec uszkodzeniu napędu elektrycznego i samego silnika elektrycznego, silnik elektryczny nie powinien automatycznie uruchamiać się ponownie.
Wszystkie te wymagania spełnia obwód załączenia silnika elektrycznego za pomocą stycznika K1. Silnik uruchamia się poprzez naciśnięcie przycisku „Start”. Późniejsze wyłączenie następuje poprzez naciśnięcie przycisku „Stop”. Taki schemat pokazano poniżej na ryc. 4.
 |
Aby włączyć silnik elektryczny, należy nacisnąć przycisk SA1 „Start”. Do uzwojenia stycznika K1 dostarczane jest napięcie sieciowe 220 woltów. Rdzeń stycznika cofa się, zamykając styki K1.1 i K1.2. Styki przycisku „Start” są samoblokujące ze stykami K1.1, a styki K1.2 łączą uzwojenia silnika z siecią.
Po naciśnięciu przycisku „Stop” obwód uzwojenia stycznika K1 zostaje otwarty, a uzwojenie zostaje odłączone od napięcia. Styki K1.1 otwarte, przycisk „Start” odblokowany. Styki K1.2 są otwarte i napięcie jest odłączane od uzwojeń silnika. Silnik wyłącza się. Stan obwodu nie zmienia się nawet po zwolnieniu przycisku Stop. Silnik elektryczny pozostaje wyłączony.
Schemat automatyczny start trójfazowy silnik elektryczny
Na schemacie rys. 4, podobnie jak na poprzednich schematach, należy ręcznie nacisnąć przycisk SA3, podłączając kondensator rozruchowy C2 i poczekać, aż wirnik silnika elektrycznego nabierze prędkości, co nie jest zbyt wygodne. Zamiast przycisku ręcznego można zastosować obwód rozruchowy, który wykorzystuje przekaźnik opóźnienia, z określonym czasem opóźnienia załączenia (po podaniu napięcia) wynoszącym 3-10 sekund. Schemat wymiany przycisku ręcznego na automatyczny pokazano poniżej na rys. 5.
 |
Po włączeniu silnika elektrycznego naciskany jest przycisk SA1 „Start”. Napięcie sieciowe 220 woltów dociera do uzwojenia stycznika K1. Rdzeń stycznika cofa się, zamykając styki K1.1 i K1.2. Styki K1.1, jak na poprzednim schemacie, samoblokują przycisk „Start” (jego styki są zmostkowane), a styki K1.2 łączą uzwojenia silnika z siecią. W tym momencie kondensator rozruchowy C2 jest podłączony przez normalnie zamknięte styki przekaźnika opóźniającego KT1.1 równolegle z kondensatorem przesuwającym fazę C1.
Równocześnie z podaniem napięcia na stycznik K1, podawane jest napięcie zasilania na przekaźnik opóźniający KT. Rozpoczyna się odliczanie czasu opóźnienia otwarcia styków normalnie zwartych KT1.1 przekaźnika KT. Po kilkusekundowym opóźnieniu zostaje uruchomiony przekaźnik KT, otwierając styki KT1.1. Kondensator rozruchowy C2 jest odłączony od kondensatora przesuwającego fazę C1. Proces uruchamiania został zakończony.
Podłączenie kondensatora rozruchowego poprzez mocne styki
Podłączeniu równolegle kondensatora rozruchowego z kondensatorem przesuwającym fazę towarzyszy silne iskrzenie styków. Styki małej mocy przekaźnika opóźnienia K1, jak pokazano na poprzednim schemacie, nie będą w stanie zapewnić długotrwałej pracy silnika elektrycznego w trybie rozruchu. Po prostu się przykleją lub wypalą. Dlatego wskazane jest kontrolowanie połączenia kondensatora rozruchowego ze stykami mocnego przekaźnika (stycznika). Taki schemat pokazano na ryc. 6.
 |
Po naciśnięciu przycisku „Start” napięcie jest przykładane w ten sam sposób do przekaźnika opóźniającego KT1. Ale przy uruchomieniu kondensator rozruchowy C2 natychmiast połączy się z kondensatorem przesuwającym fazę poprzez styki dodatkowego stycznika K2, którego uzwojenie z kolei zostanie podłączone przy uruchomieniu do sieci 220 woltów poprzez normalnie zamknięte styki przekaźnika opóźniającego KT1.
Po upływie opóźnienia czasowego przekaźnika KT1 załączy się on i jego styki KT1.1 rozłączą się, odłączając obwód uzwojenia stycznika K2 od źródła napięcia 220 V. Uzwojenie stycznika K2 zostanie odłączone od napięcia, jego styki K2.1 rozłączą się i odłączą kondensator rozruchowy C2 od kondensatora przesuwającego fazę C1, kończąc w ten sposób proces rozruchu.
Zabezpieczenie prądowe trójfazowego silnika elektrycznego
Na powyższych schematach uzwojenie silnika elektrycznego jest stale podłączone do sieci 220 V, co stwarza zagrożenie porażenia prądem elektrycznym dla ludzi i nie spełnia wymagań bezpieczeństwa. Po zakończeniu pracy elektronarzędzie należy całkowicie odłączyć od zasilania. Na żadnej części sprzętu elektrycznego nie powinno występować napięcie zagrażające życiu o wartości 220 V.
Ponadto należy chronić silnik elektryczny przed poważnymi uszkodzeniami, gdy zwarcia obwody lub elementy przewodzące prąd konstrukcji silnika elektrycznego. Aby chronić zewnętrzne przewody elektryczne przed prądami krytycznymi i awaryjnymi, wymagane jest również zabezpieczenie prądowe. Takie zabezpieczenie z powodzeniem można wykonać za pomocą trójfazowego aktualna maszyna. Schemat podłączenia silnika elektrycznego przez wyłącznik prądowy pokazano na ryc. 7.
Po włączeniu wyłącznika prądowego SA3 zapala się niebieska dioda LED VL1.1. Kiedy silnik elektryczny uruchamia się i pracuje, zapala się czerwona dioda LED VL1.2 (prawa na schemacie), a niebieska dioda gaśnie. Rezystory R1 i R2, każdy o mocy 1 W, ograniczają prąd płynący przez diody LED do 4 miliamperów. Diody VD1 i VD2 chronią diody LED przed przebiciem przez napięcie wsteczne 220 woltów.