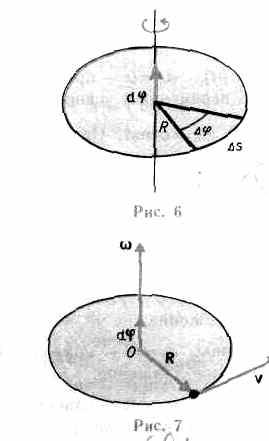
Rozważmy ciało sztywne, które obraca się wokół stałej osi. Wtedy poszczególne punkty tego ciała będą opisywać okręgi o różnych promieniach, których środki leżą na osi obrotu. Niech jakiś punkt porusza się po okręgu o promieniu R(ryc. 6). Jego położenie po upływie czasu T ustalmy kąt . Elementarne (nieskończenie małe) kąty obrotu są traktowane jako wektory. Moduł wektorowy d jest równy kątowi obrotu, a jego kierunek pokrywa się z kierunkiem ruchu translacyjnego końcówki śruby, której łeb obraca się w kierunku ruchu grota po okręgu, tj. przestrzega reguła prawej śruby(ryc. 6). Nazywa się wektory, których kierunki są powiązane z kierunkiem obrotu pseudowektory Lub wektory osiowe. Wektory te nie mają określonych punktów zastosowania: można je wykreślić z dowolnego punktu na osi obrotu.
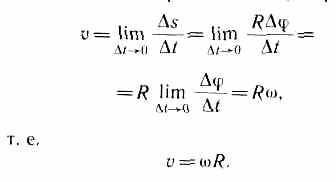
Prędkość kątowa jest wielkością wektorową równą pierwszej pochodnej kąta obrotu ciała po czasie:
Wektor „b” jest skierowany wzdłuż osi obrotu zgodnie z zasadą prawej śruby, czyli tak samo jak wektor d (rys. 7). Wymiar prędkości kątowej dim=T -1 , a . Jego jednostką jest radian na sekundę (rad/s).
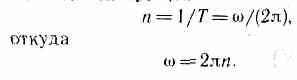
Prędkość liniowa punktu (patrz rys. 6)
W postaci wektorowej wzór na prędkość liniową można zapisać jako iloczyn wektorowy:
W tym przypadku moduł iloczynu wektorowego z definicji jest równy ![]()
I kierunek jest ten sam Z kierunek ruchu translacyjnego prawej śruby podczas jej obrotu z do R.
Jeżeli =const, to obrót jest równomierny i można go scharakteryzować okres rotacjiT- czas, w którym punkt wykonuje jeden pełny obrót, czyli obraca się o kąt 2. Ponieważ okres czasu t=T odpowiada =2, to = 2/T, skąd
![]()
Nazywa się liczbą pełnych obrotów wykonanych przez ciało podczas jego ruchu jednostajnego po okręgu w jednostce czasu prędkość obrotowa:
Przyspieszenie kątowe jest wielkością wektorową równą pierwszej pochodnej prędkości kątowej po czasie:
Kiedy ciało obraca się wokół ustalonej osi, wektor przyspieszenia kątowego jest skierowany wzdłuż osi obrotu w stronę wektora elementarnego przyrostu prędkości kątowej. Podczas ruchu przyspieszonego wektor

jest współkierunkowany z wektorem (rys. 8), przy zwalnianiu jest do niego przeciwny (rys. 9).
Składowa styczna przyspieszenia

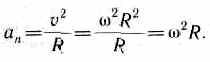
Normalna składowa przyspieszenia
Zatem połączenie liniowe (długość drogi, którą przemierza punkt leżący na łuku okręgu o promieniu R, prędkość liniowa v, przyspieszenie styczne a , przyspieszenie normalne a N) i wielkości kątowe (kąt obrotu , prędkość kątowa (o, przyspieszenie kątowe) wyraża się następującymi wzorami:
W przypadku ruchu jednostajnego punktu po okręgu (=const)
gdzie 0 jest początkową prędkością kątową.
Pytania bezpieczeństwa
Jak nazywa się punkt materialny? Dlaczego w mechanice wprowadzono taki model?
Co to jest układ odniesienia?
Co to jest wektor przemieszczenia? Czy wielkość wektora przemieszczenia jest zawsze równa segmentowi ścieżki,
przekroczył punkt?
Jaki rodzaj ruchu nazywa się translacyjnym? rotacyjny?
Zdefiniuj wektory średnia prędkość i średnie przyspieszenie, prędkość chwilowa
i natychmiastowe przyspieszenie. Jakie są ich kierunki?
Co charakteryzuje składową styczną przyspieszenia? normalny komponent
przyśpieszenie? Jakie są ich moduły?
Czy możliwe są ruchy, w których nie występuje normalne przyspieszenie? styczny
przyśpieszenie? Podaj przykłady.
Co to jest prędkość kątowa? przyspieszenie kątowe? Jak wyznaczane są ich kierunki?
Jaki jest związek między wielkościami liniowymi i kątowymi?
Zadania
1.1. Zależność drogi przebytej przez ciało od czasu wyraża równanie s = A+BT+CT 2 + Dt 3 (Z= 0,1 m/s2, D= 0,03 m/s 3). Ustal: 1) po jakim czasie od rozpoczęcia ruchu przyspieszenie a ciała będzie równe 2 m/s 2; 2) średnie przyspieszenie<а>ciała w tym okresie. [ 1) 10 s; 2) 1,1 m/s2]
1.2. Pomijając opór powietrza, określ kąt pod jakim ciało zostanie wyrzucone w stronę horyzontu, jeśli maksymalna wysokość wzniesienia ciała będzie równa 1/4 zasięgu jego lotu.
1.3. Koło promieniowe R= 0,1 m obraca się tak, że zależność prędkości kątowej od czasu wyraża równanie = 2At+5Bt 4 (A=2 rad/s 2 i B=1 rad/s 5). Wyznacz całkowite przyspieszenie punktów przechodzących przez felgę t= 1 s od rozpoczęcia obrotu i liczbę obrotów wykonanych przez koło w tym czasie. [a = 8,5 m/s2; N = 0,48]
1.4. Przyspieszenie normalne punktu poruszającego się po okręgu o promieniu r = 4 m, dane równaniem A N =A+-Bt+Ct 2 (A=1 m/s 2, W=6 m/s 3, Z=3 m/s 4). Wyznaczyć: 1) przyspieszenie styczne punktu; 2) drogę przebytą przez punkt w czasie t 1 = 5 s od rozpoczęcia ruchu; 3) przyspieszenie całkowite dla czasu t 2 =1 s. [ 1) 6 m/s 2 ; 2) 85 m; 3) 6,32 m/s2]
1.5. Prędkość obrotowa koła w równomiernym zwolnionym tempie T=1 min zmniejszono z 300 do 180 min -1 . Wyznaczyć: 1) przyspieszenie kątowe koła; 2) liczbę pełnych obrotów koła wykonanych w tym czasie.
1.6. Dysk o promieniu R=10 cm obraca się wokół ustalonej osi tak, że zależność kąta obrotu promienia krążka od czasu wyraża równanie = A+Bt+Ct 2 +Dt 3 (B= l rad/s, Z=1 rad/s 2, D=l rad/s 3). Wyznaczyć dla punktów na obręczy koła do końca drugiej sekundy po rozpoczęciu ruchu: 1) przyspieszenie styczne a ; 2) przyspieszenie normalne a N; 3) całkowite przyspieszenie a. [1) 0,14 m/s2; 2) 28,9 m/s2; 3) 28,9 m/s2]
Rozważmy ciało sztywne, które obraca się wokół stałej osi. Wtedy poszczególne punkty tego ciała będą opisywać okręgi o różnych promieniach, których środki leżą na osi obrotu. Niech jakiś punkt porusza się po okręgu o promieniu R(ryc. 6). Jego położenie po upływie czasu T ustalmy kąt . Elementarne (nieskończenie małe) kąty obrotu są traktowane jako wektory. Moduł wektorowy d jest równy kątowi obrotu, a jego kierunek pokrywa się z kierunkiem ruchu translacyjnego końcówki śruby, której łeb obraca się w kierunku ruchu grota po okręgu, tj. przestrzega reguła prawej śruby(ryc. 6). Nazywa się wektory, których kierunki są powiązane z kierunkiem obrotu pseudowektory Lub wektory osiowe. Wektory te nie mają określonych punktów zastosowania: można je wykreślić z dowolnego punktu na osi obrotu.
Prędkość kątowa jest wielkością wektorową równą pierwszej pochodnej kąta obrotu ciała po czasie:
Wektor „b” jest skierowany wzdłuż osi obrotu zgodnie z zasadą prawej śruby, czyli tak samo jak wektor d (rys. 7). Wymiar prędkości kątowej dim=T -1 , a . Jego jednostką jest radian na sekundę (rad/s).
Prędkość liniowa punktu (patrz rys. 6)
W postaci wektorowej wzór na prędkość liniową można zapisać jako iloczyn wektorowy:
W tym przypadku moduł iloczynu wektorowego z definicji jest równy ![]()
I kierunek jest ten sam Z kierunek ruchu translacyjnego prawej śruby podczas jej obrotu z do R.
Jeżeli =const, to obrót jest równomierny i można go scharakteryzować okres rotacjiT- czas, w którym punkt wykonuje jeden pełny obrót, czyli obraca się o kąt 2. Ponieważ okres czasu t=T odpowiada =2, to = 2/T, skąd
![]()
Nazywa się liczbą pełnych obrotów wykonanych przez ciało podczas jego ruchu jednostajnego po okręgu w jednostce czasu prędkość obrotowa:
Przyspieszenie kątowe jest wielkością wektorową równą pierwszej pochodnej prędkości kątowej po czasie:
Kiedy ciało obraca się wokół ustalonej osi, wektor przyspieszenia kątowego jest skierowany wzdłuż osi obrotu w stronę wektora elementarnego przyrostu prędkości kątowej. Podczas ruchu przyspieszonego wektor
jest współkierunkowany z wektorem (rys. 8), przy zwalnianiu jest do niego przeciwny (rys. 9).
Składowa styczna przyspieszenia
Normalna składowa przyspieszenia
Zatem połączenie liniowe (długość drogi, którą przemierza punkt leżący na łuku okręgu o promieniu R, prędkość liniowa v, przyspieszenie styczne a , przyspieszenie normalne a N) i wielkości kątowe (kąt obrotu , prędkość kątowa (o, przyspieszenie kątowe ) wyraża się następującymi wzorami:
W przypadku ruchu jednostajnego punktu po okręgu (=const)
gdzie 0 jest początkową prędkością kątową.
Pytania bezpieczeństwa
Jak nazywa się punkt materialny? Dlaczego w mechanice wprowadzono taki model?
Co to jest układ odniesienia?
Co to jest wektor przemieszczenia? Czy wielkość wektora przemieszczenia jest zawsze równa segmentowi ścieżki,
przekroczył punkt?
Jaki rodzaj ruchu nazywa się translacyjnym? rotacyjny?
Zdefiniować wektory średniej prędkości i średniego przyspieszenia, prędkość chwilowa
i natychmiastowe przyspieszenie. Jakie są ich kierunki?
Co charakteryzuje składową styczną przyspieszenia? normalny komponent
przyśpieszenie? Jakie są ich moduły?
Czy możliwe są ruchy, w których nie występuje normalne przyspieszenie? styczny
przyśpieszenie? Podaj przykłady.
Co to jest prędkość kątowa? przyspieszenie kątowe? Jak wyznaczane są ich kierunki?
Jaki jest związek między wielkościami liniowymi i kątowymi?
Zadania
1.1. Zależność drogi przebytej przez ciało od czasu wyraża równanie s = A+BT+CT 2 + Dt 3 (Z= 0,1 m/s2, D= 0,03 m/s 3). Ustal: 1) po jakim czasie od rozpoczęcia ruchu przyspieszenie a ciała będzie równe 2 m/s 2; 2) średnie przyspieszenie<а>ciała w tym okresie. [ 1) 10 s; 2) 1,1 m/s2]
1.2. Pomijając opór powietrza, określ kąt pod jakim ciało zostanie wyrzucone w stronę horyzontu, jeśli maksymalna wysokość wzniesienia ciała będzie równa 1/4 zasięgu jego lotu.
1.3. Koło promieniowe R= 0,1 m obraca się tak, że zależność prędkości kątowej od czasu wyraża równanie = 2At+5Bt 4 (A=2 rad/s 2 i B=1 rad/s 5). Wyznacz całkowite przyspieszenie punktów przechodzących przez felgę t= 1 s od rozpoczęcia obrotu i liczbę obrotów wykonanych przez koło w tym czasie. [a = 8,5 m/s2; N = 0,48]
1.4. Przyspieszenie normalne punktu poruszającego się po okręgu o promieniu r = 4 m, dane równaniem A N =A+-Bt+Ct 2 (A=1 m/s 2, W=6 m/s 3, Z=3 m/s 4). Wyznaczyć: 1) przyspieszenie styczne punktu; 2) drogę przebytą przez punkt w czasie t 1 = 5 s od rozpoczęcia ruchu; 3) przyspieszenie całkowite dla czasu t 2 =1 s. [ 1) 6 m/s 2 ; 2) 85 m; 3) 6,32 m/s2]
1.5. Prędkość obrotowa koła w równomiernym zwolnionym tempie T=1 min zmniejszono z 300 do 180 min -1 . Wyznaczyć: 1) przyspieszenie kątowe koła; 2) liczbę pełnych obrotów koła wykonanych w tym czasie.
1.6. Dysk o promieniu R=10 cm obraca się wokół ustalonej osi tak, że zależność kąta obrotu promienia krążka od czasu wyraża równanie = A+Bt+Ct 2 +Dt 3 (B= l rad/s, Z=1 rad/s 2, D=l rad/s 3). Wyznaczyć dla punktów na obręczy koła do końca drugiej sekundy po rozpoczęciu ruchu: 1) przyspieszenie styczne a ; 2) przyspieszenie normalne a N; 3) całkowite przyspieszenie a. [1) 0,14 m/s2; 2) 28,9 m/s2; 3) 28,9 m/s2]
Długość i odległość Masa Miary objętości materiałów sypkich i artykułów spożywczych Powierzchnia Objętość i jednostki miary w przepisy kulinarne Temperatura Ciśnienie, naprężenie mechaniczne, moduł Younga Energia i praca Moc Siła Czas Prędkość liniowa Kąt płaszczyzny Sprawność cieplna i efektywność paliwowa Liczby Jednostki miary ilości informacji Kursy wymiany Wymiary odzież damska i obuwia Rozmiary odzieży i obuwia męskiego Prędkość kątowa i częstotliwość obrotowa Przyspieszenie Przyspieszenie kątowe Gęstość Objętość właściwa Moment bezwładności Moment siły Moment obrotowy Ciepło właściwe spalania (masowe) Gęstość energii i ciepło właściwe spalania paliwa (objętościowe) Różnica temperatur Współczynnik rozszerzalność cieplna Opór cieplny Przewodność cieplna Ciepło właściwe Ekspozycja na energię, moc promieniowania cieplnego Gęstość przepływ ciepła Współczynnik przenikania ciepła Przepływ objętościowy Przepływ masowy Natężenie przepływu molowego Gęstość przepływu masowego Stężenie molowe Stężenie masowe w roztworze Lepkość dynamiczna (absolutna) Lepkość kinematyczna Napięcie powierzchniowe Przepuszczalność pary Przepuszczalność pary, szybkość przenikania pary Poziom dźwięku Czułość mikrofonu Poziom ciśnienia akustycznego (SPL) Jasność Natężenie światła Oświetlenie Rozdzielczość w grafika komputerowa Częstotliwość i długość fali Moc optyczna w dioptriach i ogniskowa Moc optyczna w dioptriach i powiększenie obiektywu (×) Ładunek elektryczny Liniowa gęstość ładunku Gęstość powierzchniowaładunek Gęstość ładunku objętościowego Prąd elektryczny Liniowa gęstość prądu Powierzchniowa gęstość prądu Napięcie pole elektryczne Potencjał i napięcie elektrostatyczne Opór elektryczny Specyficzne opór elektryczny Przewodność elektryczna Przewodność elektryczna Pojemność elektryczna Indukcyjność Amerykański miernik drutu Poziomy w dBm (dBm lub dBmW), dBV (dBV), watach i innych jednostkach Siła magnetomotoryczna Napięcie pole magnetyczne Strumień magnetyczny Indukcja magnetyczna Moc pochłoniętej dawki promieniowania jonizującego Radioaktywność. Rozpad promieniotwórczy Promieniowanie. Dawka narażenia Promieniowanie. Dawka pochłonięta Przedrostki dziesiętne Przesyłanie danych Typografia i przetwarzanie obrazu Jednostki objętości drewna Obliczenia masy molowej Układ okresowy okresowy pierwiastki chemiczne DI Mendelejew
1 obrót na minutę [rpm] = 0,10471975511966 radianów na sekundę [rad/s]
Wartość początkowa
Przeliczona wartość
radiany na sekundę radiany na dzień radiany na godzinę radiany na minutę stopnie na dzień stopnie na godzinę stopnie na minutę stopnie na sekundę obroty na dzień obroty na godzinę obroty na minutę obroty na sekundę obroty na rok obroty na miesiąc obroty na tydzień stopnie na rok stopnie na miesiąc stopnie na tydzień radiany na rok radiany na miesiąc radiany na tydzień
Polecany artykuł
Więcej o prędkości kątowej

Informacje ogólne
Prędkość kątowa wynosi ilość wektora, który określa prędkość obrotu ciała względem osi obrotu. Wektor ten jest skierowany prostopadle do płaszczyzny obrotu i wyznaczany jest za pomocą reguły świdra. Prędkość kątową mierzy się jako stosunek kąta, o jaki przesunęło się ciało, czyli przemieszczenia kątowego, do czasu, jaki na to poświęcił. W układzie SI przyspieszenie kątowe mierzy się w radianach na sekundę.
Prędkość kątowa w sporcie
Prędkość kątowa jest często wykorzystywana w sporcie. Na przykład sportowcy zmniejszają lub zwiększają prędkość kątowa ruchy kija golfowego, kija lub rakiety w celu poprawy wydajności. Prędkość kątowa jest powiązana z prędkością liniową w taki sposób, że ze wszystkich punktów segmentu obracających się wokół punktu na tym segmencie, to znaczy wokół środka obrotu, punkt najbardziej oddalony od tego środka porusza się z największą prędkością liniową. Na przykład, jeśli kij golfowy się kręci, koniec kija położony najdalej od środka obrotu porusza się z największą prędkością liniową. Jednocześnie wszystkie punkty tego odcinka poruszają się z tą samą prędkością kątową. Dlatego też wydłużając kij, kij czy rakietę, zawodnik zwiększa także prędkość liniową, a co za tym idzie prędkość uderzenia przekazywanego na piłkę, dzięki czemu może ona przelecieć na większą odległość. Skrócenie rakiety lub kija, nawet trzymanie jej niżej niż zwykle, wręcz przeciwnie, spowalnia prędkość uderzenia.


Wysocy ludzie o długich kończynach mają przewagę pod względem prędkości liniowej. Oznacza to, że poruszając nogami z tą samą prędkością kątową, poruszają stopami z większą prędkością liniową. To samo dzieje się z ich rękami. Ta zaleta może być jednym z powodów prymitywne społeczeństwa mężczyźni polowali częściej niż kobiety. Jest prawdopodobne, że wyżsi ludzie również odnieśli z tego powodu korzyści w procesie ewolucyjnym. Długie kończyny pomagały nie tylko w bieganiu, ale także podczas polowań - długie ramiona rzucał włóczniami i kamieniami z większą prędkością liniową. Z drugiej strony długie ręce i nogi mogą być niedogodnością. Długie kończyny mają więcej wagi i do ich poruszania potrzebna jest dodatkowa energia. Dodatkowo, gdy człowiek biegnie szybko, długie nogi poruszają się szybciej, co oznacza, że w przypadku zderzenia z przeszkodą, uderzenie będzie silniejsze niż u osób z krótkimi nogami, które poruszają się z tą samą prędkością liniową.
Gimnastyka, łyżwiarstwo figurowe i nurkowanie również wykorzystują prędkość kątową. Jeśli sportowiec zna prędkość kątową, łatwo jest obliczyć liczbę przewrotów i innych akrobatycznych trików podczas skoku. Podczas salta sportowcy zazwyczaj dociskają nogi i ramiona jak najbliżej ciała, aby zmniejszyć bezwładność i zwiększyć przyspieszenie, a tym samym prędkość kątową. Z drugiej strony podczas nurkowania lub lądowania sędziowie sprawdzają, jak gładko zawodnik ląduje. Przy dużych prędkościach trudno jest regulować kierunek lotu, dlatego sportowcy celowo spowalniają prędkość kątową, lekko oddalając ręce i nogi od ciała.
Sportowcy rzucający dyskiem lub rzutem młotem kontrolują również prędkość liniową za pomocą prędkości kątowej. Jeśli po prostu rzucisz młotkiem, nie obracając go w kółko przez długi czas drut stalowy, zwiększając prędkość liniową, rzut nie będzie tak silny, więc najpierw obraca się młotkiem. Sportowcy olimpijscy obracają się wokół własnej osi trzy do czterech razy, aby maksymalnie zwiększyć prędkość kątową.
Prędkość kątowa i przechowywanie danych na nośnikach optycznych

Kiedy dane są zapisywane na nośnikach optycznych, takich jak dyski kompaktowe (CD), napęd wykorzystuje również prędkości kątowe i liniowe do pomiaru prędkości, z jaką dane są zapisywane i odczytywane. Istnieje kilka sposobów rejestrowania danych, które wykorzystują zmienną lub stałą prędkość liniową lub kątową. A więc na przykład tryb stała prędkość liniowa(w języku angielskim - Constant Linear Velocity lub CVL) to jedna z głównych metod nagrywania płyt, w której dane zapisywane są z tą samą prędkością na całej powierzchni płyty. Podczas nagrywania w strefowa stała prędkość liniowa(w języku angielskim - Zone Constant Linear Velocity lub ZCLV) podczas nagrywania na określonej części, czyli strefie dysku, utrzymywana jest stała prędkość. W takim przypadku płyta obraca się wolniej podczas nagrywania w strefach zewnętrznych. Tryb częściowo stała prędkość kątowa(Partial Constant Angular Velocity lub PCAV) umożliwia nagrywanie ze stopniowym wzrostem prędkości kątowej, aż do osiągnięcia określonego progu. Następnie prędkość kątowa staje się stała. Ostatnim trybem nagrywania jest stała prędkość kątowa(Stała prędkość kątowa lub CAV). W tym trybie podczas nagrywania na całej powierzchni płyty utrzymywana jest ta sama prędkość kątowa. W tym przypadku prędkość liniowa wzrasta w miarę przesuwania się głowicy rejestrującej coraz dalej w stronę krawędzi dysku. Tryb ten stosowany jest również podczas nagrywania płyt i dysków twardych komputerów.
Prędkość kątowa w przestrzeni
W odległości 35 786 kilometrów (22 236 mil) od Ziemi znajduje się orbita, po której krążą satelity. Jest to szczególna orbita, ponieważ ciała obracające się na niej w tym samym kierunku co Ziemia pokonują całą orbitę mniej więcej w tym samym czasie, w jakim Ziemia wykonuje okrąg wokół własnej osi. To trochę mniej niż 24 godziny, czyli jeden dzień gwiazdowy. Ponieważ prędkość kątowa obrotu ciał na tej orbicie jest równa prędkości kątowej obrotu Ziemi, obserwatorom z Ziemi wydaje się, że ciała te się nie poruszają. Ta orbita nazywa się geostacjonarny.
Orbitę tę zwykle umieszczają satelity monitorujące zmiany pogody (satelity meteorologiczne), satelity monitorujące zmiany w oceanach oraz satelity komunikacyjne zapewniające transmisje telewizyjne i radiowe, komunikację telefoniczną i Internet satelitarny. W przypadku satelitów często stosuje się orbitę geostacjonarną, ponieważ antena skierowana na satelitę nie musi być skierowana po raz drugi. Z drugiej strony ich stosowanie wiąże się z niedogodnościami, takimi jak konieczność posiadania bezpośredniego pola widzenia pomiędzy anteną a satelitą. Dodatkowo orbita geostacjonarna jest oddalona od Ziemi i transmisja sygnału wymaga użycia nadajników o większej mocy niż te wykorzystywane do transmisji z niższych orbit. Sygnał dociera z opóźnieniem około 0,25 sekundy, co jest zauważalne dla użytkowników. Na przykład podczas transmisji informacyjnych korespondenci w odległych obszarach zwykle komunikują się ze studiem za pośrednictwem satelity; widać, że gdy prezenter telewizyjny zadaje im pytanie, odpowiadają z opóźnieniem. Mimo to satelity na orbicie geostacjonarnej są powszechnie stosowane. Przykładowo do niedawna komunikacja pomiędzy kontynentami odbywała się głównie za pomocą satelitów. Obecnie został on w dużej mierze zastąpiony przez ułożone w poprzek kable międzykontynentalne dno oceanu; jednakże łączność satelitarna jest nadal używana w odległych obszarach. W ciągu ostatnich dwudziestu lat satelity telekomunikacyjne zapewniły także dostęp do Internetu, zwłaszcza w odległych lokalizacjach, gdzie nie ma naziemnej infrastruktury komunikacyjnej.

O żywotności satelity decyduje przede wszystkim ilość paliwa na pokładzie potrzebna do okresowych korekt orbity. Ilość paliwa w satelitach jest ograniczona, więc gdy się skończy, satelity wyłączane są z eksploatacji. Najczęściej przenoszone są na orbitę pogrzebową, czyli orbitę znacznie wyższą niż geostacjonarna. Jest to kosztowny proces; jednakże pozostawienie niepotrzebnych satelitów na orbicie geostacjonarnej stwarza ryzyko kolizji z innymi satelitami. Przestrzeń na orbicie geostacjonarnej jest ograniczona, dlatego pozostawione na orbicie stare satelity zajmą przestrzeń, którą mógłby zająć nowy satelita. Z tego powodu w wielu krajach obowiązują przepisy wymagające od właścicieli satelitów podpisania umowy, że satelita zostanie umieszczony na orbicie utylizacyjnej po zakończeniu okresu eksploatacji.
Artykuły w Unit Converter zostały zredagowane i zilustrowane przez Anatolija Zolotkowa
Czy tłumaczenie jednostek miar z jednego języka na inny sprawia Ci trudność? Koledzy są gotowi Ci pomóc. Zadaj pytanie w TCTerms a w ciągu kilku minut otrzymasz odpowiedź.
Obliczenia do przeliczania jednostek w konwerterze „ Prędkość kątowa i prędkość obrotowa” są wykonywane przy użyciu funkcji unitconversion.org.