Silniki elektryczne DC może mieć wzbudzenie niezależne, równoległe, sekwencyjne lub mieszane (ryc. 6.1).
Ryż. 6.1. Obwody niezależnych silników elektrycznych prądu stałego ( A),
równoległy ( B), sekwencyjny ( V) i mieszane ( G) podekscytowanie
(górna część diagramu „c” należy do diagramu „a”)
W silniku o wzbudzeniu równoległym uzwojenie wzbudzenia jest podłączone równolegle do zacisków twornika. Ale prąd przepływający przez to uzwojenie, w przeciwieństwie do prądu twornika, nie zależy od obciążenia i jest określony przez napięcie przyłożone do twornika i całkowitą rezystancję obwodu wzbudzenia. Z tego powodu silnik elektryczny o wzbudzeniu równoległym nazywany jest również silnikiem elektrycznym o oddzielnym wzbudzeniu.
Moment obrotowy M Silnik prądu stałego i jego pole elektromagnetyczne mi określone wzorami
M= do F I I; mi= kФω,
gdzie k jest współczynnikiem obliczeniowym silnika;
Ф – strumień magnetyczny, Wb;
I Ja jest prądem twornika, A.
ω – prędkość kątowa, rad/s.
Równania elektromechaniczne ω = ƒ ( I i) i mechaniczne ω = ƒ ( M) cechy mają postać
ω = U/(kF) – ( R ja + R p) / (k F) I I;
ω = U/(kF) – ( R ja + R p) / (do 2 F 2) M.
Idealna prędkość kątowa prędkość biegu jałowego(Na I ja = 0 lub M = 0)
ω 0 = U/(kF).
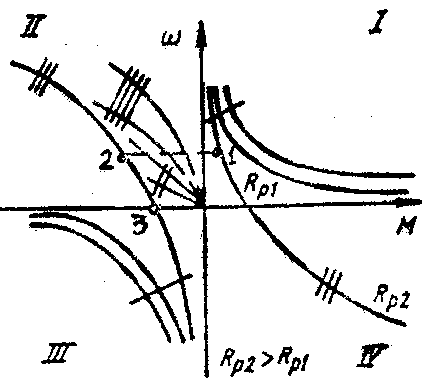
Na ryc. 6.2 przedstawia charakterystykę mechaniczną silnika prądu stałego z niezależne wzbudzenie(DPT NV) we wszystkich trybach pracy. Charakterystycznymi punktami charakterystyki w trybie silnikowym są: idealny punkt biegu jałowego (ω 0, M= 0); nominalny punkt trybu (ω n, M N); kropka zwarcie (ω = 0, M = M Do).
Sztywność charakterystyki mechanicznej zależy od strumienia wzbudzenia i rezystancji obwodu twornika:
β = re M/dω = - do 2 Ф 2 / ( R ja + R p) = - M k/ω.

Ryż. 6.2. Połączone właściwości mechaniczne silnika prądu stałego z niezależnym wzbudzeniem
Najwyższa wartość modułu sztywności odpowiada naturalnej charakterystyce mechanicznej, ponieważ prąd wzbudzenia jest równy wartości nominalnej i rezystancji regulacyjnej R p = 0. Wraz ze wzrostem rezystancji reostatu R p nachylenie charakterystyki mechanicznej wzrasta, a prędkość kątowa maleje. Przy danej wartości rezystancji R p i moment nominalny M n prędkość kątowa silnika
ω n.r = ω 0 (1 – I N ( R ja + R P) / U N.
Aby obliczyć charakterystykę mechaniczną, należy znać rezystancję twornika silnika R i, który jest określony w katalogach. W przypadku braku danych fabrycznych wartość R Znajduję to w przybliżeniu za pomocą wzoru
R i = 0,5 (1 – ŋ n) ( U N/ I N).
Ponieważ właściwości mechaniczne DPT NV są proste, do ich skonstruowania wystarczą dwa punkty:
1) ω = ω 0 i M = 0,
2) ω = ω n (lub ω = ω n.r.) i M = M N.
W przypadku DPT NV możliwe są trzy następujące tryby hamowania elektrycznego.
1. Hamowanie regeneracyjne co ma miejsce, gdy prędkość obrotowa silnika jest wyższa niż idealna prędkość biegu jałowego. Jest najbardziej ekonomiczny, ponieważ energia hamowania przekazywana jest do sieci elektrycznej. Charakterystyki mechaniczne w tym trybie są kontynuacją odpowiednich charakterystyk trybu silnikowego w ćwiartce II. Obwód silnika nie zmienia się podczas hamowania regeneracyjnego.
2. Hamowanie dynamiczne. Twornik silnika jest odłączony od sieci i zwarty do rezystancji. W tym przypadku energia mechaniczna części ruchomych (mechanizmu i twornika silnika) zamieniana jest na energię elektryczną, która jest tracona w postaci energii cieplnej w oporze obwodu twornika. Charakterystyki mechaniczne w tym trybie hamowania przechodzą przez początek współrzędnych (na ryc. 6.2 - linie z trzema nacięciami).
3. Hamowanie tyłem przeprowadzane na dwa sposoby:
1) wprowadzenie dużego oporu do obwodu twornika. W takim przypadku moment silnika staje się mniejszy niż moment obciążenia statycznego M Z. Silnik zatrzymuje się (w punkcie A), a następnie pod wpływem momentu obrotowego M c zaczyna się obracać w innym kierunku, wytwarzając moment hamowania; w punkcie B następuje stan ustalony. Charakterystyki mechaniczne są kontynuacją odpowiednich cech trybu silnika (na ryc. 6.2 - linie z czterema wycięciami);
2) hamowanie poprzez zmianę polaryzacji uzwojenia twornika po drodze. Silnik pracuje w danym momencie 1 , po przełączeniu przejdzie w punkt na charakterystykę reostatyczną 2. Wzdłuż linii 2–3 następuje hamowanie (linia z pięcioma znacznikami). W punkcie 3 silnik zatrzymuje się i należy go odłączyć od sieci, aby uniknąć przełączenia w tryb silnika z obrotami w przeciwnym kierunku.
W silnik prądu stałego o wzbudzeniu szeregowymde-niem Prąd twornika jest również prądem wzbudzenia. Strumień magnetyczny wzbudzenia rośnie wraz ze wzrostem obciążenia, w wyniku czego prędkość kątowa maleje zgodnie z równaniem (6.1), a właściwości mechaniczne silnika będą miękkie (rys. 6.3). Dzięki temu NV DPT stosunkowo łatwo i płynnie pokonuje przeciążenia oraz ma wysoki poziom moment rozruchowy. Te właściwości silnika pozwalają na jego szerokie zastosowanie w napędzaniu mechanizmów transportowych. Właściwości mechaniczne silnika ulegają znacznemu złagodzeniu po wprowadzeniu reostatu do obwodu twornika (ryc. 6.3, linie z jednym wycięciem).
Ryż. 6.3. Charakterystyka mechaniczna silnika prądu stałego
z sekwencyjnym wzbudzeniem
W przypadku DPT PV nie można wdrożyć trybu hamowania regeneracyjnego, ponieważ nie ma on idealnej prędkości biegu jałowego.
Hamowanie dynamiczne można przeprowadzić zgodnie ze schematem z samowzbudzeniem i niezależnym wzbudzeniem. W pierwszym przypadku twornik i uzwojenie wzbudzenia są odłączone od sieci i zamknięte do reostatu. Do unikać rozmagnesowania maszyny, konieczne jest przełączenie uzwojenia wzbudzenia (lub twornika), aby kierunek prądu w uzwojeniu wzbudzenia nie uległ zmianie. W tym przypadku maszyna samowzbudza się dla danej rezystancji obwodu twornika tylko przy określonej wartości prędkość kątowa; wzbudzony wytwarza moment hamujący. Charakterystyki mechaniczne są nieliniowe (na rys. 6.3 znajdują się krzywe z czterema karbami).
Charakterystyki mechaniczne silnika w trybie hamowania dynamicznego z niezależnym wzbudzeniem są podobne do odpowiednich charakterystyk silnika z niezależnym wzbudzeniem (na ryc. 6.3 - linie z dwoma wycięciami). Znalazłem taki sposób hamowania szerokie zastosowanie, a pierwszą metodę stosuje się rzadko, głównie jako metodę awaryjną, np. w przypadku zaniku napięcia w sieci.
Hamowanie poprzez przełączenie odbywa się, podobnie jak w DPT NV, na dwa sposoby:
1) włączenie dużej rezystancji do obwodu twornika;
2) zmiana polaryzacji uzwojenia twornika, pozostawiając niezmieniony kierunek prądu w uzwojeniu wzbudzenia.
W przypadku pierwszej metody charakterystyka mechaniczna będzie kontynuacją charakterystyki odpowiadającej trybowi silnika (na ryc. 6.3 jest linia z trzema nacięciami). W drugiej metodzie hamowanie odbywa się wzdłuż linii 1 –2–3 .
Regulacja prędkości napędów elektrycznych prądu stałego. Prędkość DPT NV można regulować:
1) zmieniając rezystancję w obwodzie twornika;
2) zmiana przepływu wzbudzenia;
3) zmiana napięcia doprowadzanego do twornika.
Regulacja według pierwszej metody ma istotne wady:
– sztywność charakterystyk mechanicznych maleje wraz ze spadkiem prędkości kątowej, a straty mocy w obwodzie głównym rosną;
– zakres regulacji jest ograniczony, szczególnie przy małych obciążeniach;
– płynność i dokładność regulacji są niskie.
Z tych powodów ta metoda sterowania jest rzadko stosowana w napędach prądu stałego.
Przez druga metoda Strumień magnetyczny można regulować tylko w kierunku zmniejszania (ponieważ w trybie nominalnym obwód magnetyczny silnika jest nasycony), co odpowiada wzrostowi prędkości powyżej nominalnej. Możliwy zakres regulacji prędkości obrotowej nie przekracza 2 dla silnika standardowego. Górna granica prędkości ograniczona jest wytrzymałością mechaniczną elementów twornika silnika – pasm uzwojenia twornika i komutatora.
Głównym sposobem regulacji prędkości NV DC jest metoda polegająca na zmianie napięcia dostarczanego do twornika, która odbywa się za pomocą specjalnego regulowanego konwertera. Przetwornice tyrystorowe stosowane są głównie jako indywidualne źródła zasilania. Sztywność charakterystyk mechanicznych napędu w układzie „przetwornik – DPT NV” jest niemal stała. Charakterystyki mechaniczne to rodzina prostych równoległych do siebie. Zasięg, płynność i dokładność regulacji są tu wyższe niż przy innych sposobach regulacji. Dlatego tego systemu Napęd stosowany jest w mechanizmach wymagających głębokiej i płynnej regulacji prędkości obrotowej.
Obliczanie dodatkowych rezystorów w obwodzie twornika DPT NV. Jeżeli znana jest naturalna charakterystyka elektromechaniczna lub mechaniczna 1 silnik (ryc. 6.4) i jego dane paszportowe, a następnie obliczyć opór R d, jeśli jest zawarty w obwodzie twornika, pożądana sztuczna charakterystyka 2 przejdzie przez punkt A o podanych współrzędnych ω i, I i lub ω i, M i, można wykonać przy użyciu następujących najpowszechniejszych metod.

Ryż. 6.4. Charakterystyka DPT NV do obliczania wartości
rezystory regulacyjne
Metoda proporcji. Zapiszmy stosunek spadków prędkości do prądu I i lub moment M oraz na naturalnym Δω e i pożądanym sztucznym Δω oraz charakterystykach:
Δω e / Δω u = I I R I / ( I I ( R ja + R d)) = R I / ( R ja + R D).
Następnie wymaganą ilość
R d = R i (Δω i / Δω e – 1).
Metoda segmentowa nie wymaga znajomości wartości rezystancji własnej silnika R I (co więcej, jego wartość można określić na podstawie znanej cechy naturalnej).
Zapiszmy wyrażenie na prędkość silnika przy danej sztucznej charakterystyce (patrz rys. 6.4) przy prądzie znamionowym I n, chwila M n, strumień magnetyczny Fn i napięcie U N:
ω i = U n / (kF n) (1 – I N R/ U N),
Gdzie U n / (kF n) = ω 0 .
ω i = ω 0 (1 – R / R N).
Tutaj R n = U N/ I n – tzw. rezystancja nominalna, będąca wartością bazową do obliczeń, Ohm.
Stosunek
R / U n = (ω 0 – ω u) / ω 0 = δ
odzwierciedla ważną właściwość NV DPT: względna różnica prędkości δ = Δω / ω 0 jest równa względnej czynnej rezystancji obwodu twornika R / R N.
Oznaczmy na rys. 6,4 punkty charakterystyczne A, B,Z, D i zauważ, że ω 0 – ω i = Δω = AC, ω 0 = ogłoszenie. Następnie R = R n Δω / ω 0 = R N AC/ogłoszenie; R d = R N BZ/ogłoszenie; R ja = R N AB /ogłoszenie.
Zatem znaleźć R d musisz najpierw określić długości segmentów na podstawie charakterystyk BZ I ogłoszenie przy znamionowym prądzie lub momencie obrotowym i obliczyć rezystancję znamionową R n = U N/ I N.
Obliczenie dodatkowych rezystorów można również wykonać korzystając z poniższych wzorów dla danego dopuszczalnego prądu I dodatkowy, który jest określony przez wartość dopuszczalnego momentu M warunki dodatkowe lub warunki rozruchu, cofania i hamowania.
Rezystancja rezystora R d1 na początku ( mi = 0)
R d1 = ( U / I dodatkowy) - R I.
Rezystor R d2 rezystancja podczas hamowania dynamicznego
R d2 = ( mi / I dodatkowy) - R ja ≈ ( U / I dodatkowy) - R I).
Rezystancja rezystora R d3 podczas hamowania do tyłu lub hamowania
R d3 = (( U + mi) / I dodatkowy) - R ja ≈ (2 U / I dodatkowy) - R I.
Przykład . DPT NV typ PBST-53 posiada następujące dane paszportowe: R n = 4,8 kW; N n = 1500 obr/min; U n = 220 V; I n = 24,2 A; R i = 0,38 oma; I v.n = 0,8 A. Należy określić:
1) rezystancję rezystora, którego włączenie do obwodu twornika silnika zapewni przejście sztucznej charakterystyki mechanicznej przez punkt o współrzędnych ω i = 90 rad/s, M n = 25 Nm;
2) rezystancja rezystorów, których włączenie ograniczy prąd podczas rozruchu i hamowania poprzez przełączenie wsteczne do poziomu I dodatkowy = 3 I N.
Silniki prądu stałego mogą mieć wzbudzenie niezależne, równoległe, szeregowe lub mieszane (ryc. 6.1).
Ryż. 6.1. Obwody niezależnych silników elektrycznych prądu stałego ( A),
równoległy ( B), sekwencyjny ( V) i mieszane ( G) podekscytowanie
(górna część diagramu „c” należy do diagramu „a”)
W silniku o wzbudzeniu równoległym uzwojenie wzbudzenia jest podłączone równolegle do zacisków twornika. Ale prąd przepływający przez to uzwojenie, w przeciwieństwie do prądu twornika, nie zależy od obciążenia i jest określony przez napięcie przyłożone do twornika i całkowitą rezystancję obwodu wzbudzenia. Z tego powodu silnik elektryczny o wzbudzeniu równoległym nazywany jest również silnikiem elektrycznym o oddzielnym wzbudzeniu.
Moment obrotowy M Silnik prądu stałego i jego pole elektromagnetyczne mi określone wzorami
M= do F I I; mi= kФω,
gdzie k jest współczynnikiem obliczeniowym silnika;
Ф – strumień magnetyczny, Wb;
I Ja jest prądem twornika, A.
ω – prędkość kątowa, rad/s.
Równania elektromechaniczne ω = ƒ ( I i) i mechaniczne ω = ƒ ( M) cechy mają postać
ω = U/(kF) – ( R ja + R p) / (k F) I I;
ω = U/(kF) – ( R ja + R p) / (do 2 F 2) M.
Prędkość kątowa idealnej prędkości biegu jałowego (przy I ja = 0 lub M = 0)
ω 0 = U/(kF).
Na ryc. 6.2 przedstawia charakterystykę mechaniczną silnika prądu stałego z niezależnym wzbudzeniem (DC NV) we wszystkich trybach pracy. Charakterystycznymi punktami charakterystyki w trybie silnikowym są: idealny punkt biegu jałowego (ω 0, M= 0); nominalny punkt trybu (ω n, M N); punkt zwarcia (ω = 0, M = M Do).
Sztywność charakterystyki mechanicznej zależy od strumienia wzbudzenia i rezystancji obwodu twornika:
β = re M/dω = - do 2 Ф 2 / ( R ja + R p) = - M k/ω.
Ryż. 6.2. Połączone właściwości mechaniczne silnika prądu stałego z niezależnym wzbudzeniem
Najwyższa wartość modułu sztywności odpowiada naturalnej charakterystyce mechanicznej, ponieważ prąd wzbudzenia jest równy wartości nominalnej i rezystancji regulacyjnej R p = 0. Wraz ze wzrostem rezystancji reostatu R p nachylenie charakterystyki mechanicznej wzrasta, a prędkość kątowa maleje. Przy danej wartości rezystancji R p i moment nominalny M n prędkość kątowa silnika
ω n.r = ω 0 (1 – I N ( R ja + R P) / U N.
Aby obliczyć charakterystykę mechaniczną, należy znać rezystancję twornika silnika R i, który jest określony w katalogach. W przypadku braku danych fabrycznych wartość R Znajduję to w przybliżeniu za pomocą wzoru
R i = 0,5 (1 – ŋ n) ( U N/ I N).
Ponieważ właściwości mechaniczne DPT NV są proste, do ich skonstruowania wystarczą dwa punkty:
1) ω = ω 0 i M = 0,
2) ω = ω n (lub ω = ω n.r.) i M = M N.
W przypadku DPT NV możliwe są trzy następujące tryby hamowania elektrycznego.
1. Hamowanie regeneracyjne co ma miejsce, gdy prędkość obrotowa silnika jest wyższa niż idealna prędkość biegu jałowego. Jest najbardziej ekonomiczny, ponieważ energia hamowania przekazywana jest do sieci elektrycznej. Charakterystyki mechaniczne w tym trybie są kontynuacją odpowiednich charakterystyk trybu silnikowego w ćwiartce II. Obwód silnika nie zmienia się podczas hamowania regeneracyjnego.
2. Hamowanie dynamiczne. Twornik silnika jest odłączony od sieci i zwarty do rezystancji. W tym przypadku energia mechaniczna części ruchomych (mechanizmu i twornika silnika) zamieniana jest na energię elektryczną, która jest tracona w postaci energii cieplnej w oporze obwodu twornika. Charakterystyki mechaniczne w tym trybie hamowania przechodzą przez początek współrzędnych (na ryc. 6.2 - linie z trzema nacięciami).
3. Hamowanie tyłem przeprowadzane na dwa sposoby:
1) wprowadzenie dużego oporu do obwodu twornika. W takim przypadku moment silnika staje się mniejszy niż moment obciążenia statycznego M Z. Silnik zatrzymuje się (w punkcie A), a następnie pod wpływem momentu obrotowego M c zaczyna się obracać w innym kierunku, wytwarzając moment hamowania; w punkcie B następuje stan ustalony. Charakterystyki mechaniczne są kontynuacją odpowiednich cech trybu silnika (na ryc. 6.2 - linie z czterema wycięciami);
2) hamowanie poprzez zmianę polaryzacji uzwojenia twornika po drodze. Silnik pracuje w danym momencie 1 , po przełączeniu przejdzie w punkt na charakterystykę reostatyczną 2. Wzdłuż linii 2–3 następuje hamowanie (linia z pięcioma znacznikami). W punkcie 3 silnik zatrzymuje się i należy go odłączyć od sieci, aby uniknąć przełączenia w tryb silnika z obrotami w przeciwnym kierunku.
W silnik prądu stałego o wzbudzeniu szeregowymde-niem Prąd twornika jest również prądem wzbudzenia. Strumień magnetyczny wzbudzenia rośnie wraz ze wzrostem obciążenia, w wyniku czego prędkość kątowa maleje zgodnie z równaniem (6.1), a właściwości mechaniczne silnika będą miękkie (rys. 6.3). Dzięki temu NV DPT stosunkowo łatwo i płynnie pokonuje przeciążenia oraz posiada wysoki moment rozruchowy. Te właściwości silnika pozwalają na jego szerokie zastosowanie w napędzaniu mechanizmów transportowych. Właściwości mechaniczne silnika ulegają znacznemu złagodzeniu po wprowadzeniu reostatu do obwodu twornika (ryc. 6.3, linie z jednym wycięciem).
Ryż. 6.3. Charakterystyka mechaniczna silnika prądu stałego
z sekwencyjnym wzbudzeniem
W przypadku DPT PV nie można wdrożyć trybu hamowania regeneracyjnego, ponieważ nie ma on idealnej prędkości biegu jałowego.
Hamowanie dynamiczne można przeprowadzić zgodnie ze schematem z samowzbudzeniem i niezależnym wzbudzeniem. W pierwszym przypadku twornik i uzwojenie wzbudzenia są odłączone od sieci i zamknięte do reostatu. Do unikać rozmagnesowania maszyny, konieczne jest przełączenie uzwojenia wzbudzenia (lub twornika), aby kierunek prądu w uzwojeniu pola nie uległ zmianie. W tym przypadku maszyna samowzbudza się dla zadanej rezystancji obwodu twornika tylko przy określonej wartości prędkości kątowej; wzbudzony wytwarza moment hamujący. Charakterystyki mechaniczne są nieliniowe (na rys. 6.3 znajdują się krzywe z czterema karbami).
Charakterystyki mechaniczne silnika w trybie hamowania dynamicznego z niezależnym wzbudzeniem są podobne do odpowiednich charakterystyk silnika z niezależnym wzbudzeniem (na ryc. 6.3 - linie z dwoma wycięciami). Ta metoda hamowania jest powszechnie stosowana, natomiast pierwszą metodę stosuje się rzadko, głównie jako metodę awaryjną, np. w przypadku zaniku napięcia w sieci.
Hamowanie poprzez przełączenie odbywa się, podobnie jak w DPT NV, na dwa sposoby:
1) włączenie dużej rezystancji do obwodu twornika;
2) zmiana polaryzacji uzwojenia twornika, pozostawiając niezmieniony kierunek prądu w uzwojeniu wzbudzenia.
W przypadku pierwszej metody charakterystyka mechaniczna będzie kontynuacją charakterystyki odpowiadającej trybowi silnika (na ryc. 6.3 jest linia z trzema nacięciami). W drugiej metodzie hamowanie odbywa się wzdłuż linii 1 –2–3 .
Regulacja prędkości napędów elektrycznych prądu stałego. Prędkość DPT NV można regulować:
1) zmieniając rezystancję w obwodzie twornika;
2) zmiana przepływu wzbudzenia;
3) zmiana napięcia doprowadzanego do twornika.
Regulacja według pierwszej metody ma istotne wady:
– sztywność charakterystyk mechanicznych maleje wraz ze spadkiem prędkości kątowej, a straty mocy w obwodzie głównym rosną;
– zakres regulacji jest ograniczony, szczególnie przy małych obciążeniach;
– płynność i dokładność regulacji są niskie.
Z tych powodów ta metoda sterowania jest rzadko stosowana w napędach prądu stałego.
Przez druga metoda Strumień magnetyczny można regulować tylko w kierunku zmniejszania (ponieważ w trybie nominalnym obwód magnetyczny silnika jest nasycony), co odpowiada wzrostowi prędkości powyżej nominalnej. Możliwy zakres regulacji prędkości obrotowej nie przekracza 2 dla silnika standardowego. Górna granica prędkości ograniczona jest wytrzymałością mechaniczną elementów twornika silnika – pasm uzwojenia twornika i komutatora.
Głównym sposobem regulacji prędkości NV DC jest metoda polegająca na zmianie napięcia dostarczanego do twornika, która odbywa się za pomocą specjalnego regulowanego konwertera. Przetwornice tyrystorowe stosowane są głównie jako indywidualne źródła zasilania. Sztywność charakterystyk mechanicznych napędu w układzie „przetwornik – DPT NV” jest niemal stała. Charakterystyki mechaniczne to rodzina prostych równoległych do siebie. Zasięg, płynność i dokładność regulacji są tu wyższe niż przy innych sposobach regulacji. Dlatego ten układ napędowy stosowany jest w mechanizmach wymagających głębokiej i płynnej kontroli prędkości.
Obliczanie dodatkowych rezystorów w obwodzie twornika DPT NV. Jeżeli znana jest naturalna charakterystyka elektromechaniczna lub mechaniczna 1 silnik (ryc. 6.4) i jego dane paszportowe, a następnie obliczyć opór R d, jeśli jest zawarty w obwodzie twornika, pożądana sztuczna charakterystyka 2 przejdzie przez punkt A o podanych współrzędnych ω i, I i lub ω i, M i, można wykonać przy użyciu następujących najpowszechniejszych metod.
Ryż. 6.4. Charakterystyka DPT NV do obliczania wartości
rezystory regulacyjne
Metoda proporcji. Zapiszmy stosunek spadków prędkości do prądu I i lub moment M oraz na naturalnym Δω e i pożądanym sztucznym Δω oraz charakterystykach:
Δω e / Δω u = I I R I / ( I I ( R ja + R d)) = R I / ( R ja + R D).
Następnie wymaganą ilość
R d = R i (Δω i / Δω e – 1).
Metoda segmentowa nie wymaga znajomości wartości rezystancji własnej silnika R I (co więcej, jego wartość można określić na podstawie znanej cechy naturalnej).
Zapiszmy wyrażenie na prędkość silnika przy danej sztucznej charakterystyce (patrz rys. 6.4) przy prądzie znamionowym I n, chwila M n, strumień magnetyczny Fn i napięcie U N:
ω i = U n / (kF n) (1 – I N R/ U N),
Gdzie U n / (kF n) = ω 0 .
ω i = ω 0 (1 – R / R N).
Tutaj R n = U N/ I n – tzw. rezystancja nominalna, będąca wartością bazową do obliczeń, Ohm.
Stosunek
R / U n = (ω 0 – ω u) / ω 0 = δ
odzwierciedla ważną właściwość NV DPT: względna różnica prędkości δ = Δω / ω 0 jest równa względnej czynnej rezystancji obwodu twornika R / R N.
Oznaczmy na rys. 6,4 punkty charakterystyczne A, B,Z, D i zauważ, że ω 0 – ω i = Δω = AC, ω 0 = ogłoszenie. Następnie R = R n Δω / ω 0 = R N AC/ogłoszenie; R d = R N BZ/ogłoszenie; R ja = R N AB /ogłoszenie.
Zatem znaleźć R d musisz najpierw określić długości segmentów na podstawie charakterystyk BZ I ogłoszenie przy znamionowym prądzie lub momencie obrotowym i obliczyć rezystancję znamionową R n = U N/ I N.
Obliczenie dodatkowych rezystorów można również wykonać korzystając z poniższych wzorów dla danego dopuszczalnego prądu I dodatkowy, który jest określony przez wartość dopuszczalnego momentu M warunki dodatkowe lub warunki rozruchu, cofania i hamowania.
Rezystancja rezystora R d1 na początku ( mi = 0)
R d1 = ( U / I dodatkowy) - R I.
Rezystor R d2 rezystancja podczas hamowania dynamicznego
R d2 = ( mi / I dodatkowy) - R ja ≈ ( U / I dodatkowy) - R I).
Rezystancja rezystora R d3 podczas hamowania do tyłu lub hamowania
R d3 = (( U + mi) / I dodatkowy) - R ja ≈ (2 U / I dodatkowy) - R I.
Przykład . DPT NV typ PBST-53 posiada następujące dane paszportowe: R n = 4,8 kW; N n = 1500 obr/min; U n = 220 V; I n = 24,2 A; R i = 0,38 oma; I v.n = 0,8 A. Należy określić:
1) rezystancję rezystora, którego włączenie do obwodu twornika silnika zapewni przejście sztucznej charakterystyki mechanicznej przez punkt o współrzędnych ω i = 90 rad/s, M n = 25 Nm;
2) rezystancja rezystorów, których włączenie ograniczy prąd podczas rozruchu i hamowania poprzez przełączenie wsteczne do poziomu I dodatkowy = 3 I N.
Ministerstwo Edukacji i Nauki Federacja Rosyjska
Państwowa Instytucja Edukacyjna Wyższego Szkolnictwa Zawodowego Jużno-Uralski uniwersytet państwowy
Oddział w Zlatoust
Silniki prądu stałego
ZD-431.583.270102
Ukończył: Sharipova Yu.R.
Grupa: ZD-431
Sprawdzone przez: Rumyantsev.E.
1. Wprowadzenie
2. Budowa i zasada działania silników prądu stałego
3. Uruchamianie silników
4. Dane techniczne silników
5. Sprawność silników prądu stałego
6 Charakterystyka silnika prądu stałego
6.1 Charakterystyka wydajności
6.2 Charakterystyka mechaniczna
7. Wykaz wykorzystanej literatury
1. Wprowadzenie
Maszyny elektryczne Zasilacz prądu stałego jest szeroko stosowany w różnych gałęziach przemysłu.
Znaczące rozpowszechnienie silników elektrycznych prądu stałego tłumaczy się ich cennymi cechami: wysokimi momentami rozruchowymi, hamującymi i przeciążeniowymi, stosunkowo dużą prędkością, która jest ważna podczas cofania i hamowania, oraz możliwością szerokiego i płynnego sterowania prędkością obrotową.
Silniki elektryczne prądu stałego służą do napędów regulowanych, na przykład do napędzania różnych obrabiarek i mechanizmów. Moc tych silników elektrycznych sięga setek kilowatów. W związku z automatyzacją sterowania procesy produkcyjne i mechanizmów poszerza zakres stosowania silników prądu stałego małej mocy ogólnego użytku moc od jednostek do setek watów.
W zależności od obwodu zasilania uzwojenia wzbudzenia maszyny prądu stałego dzielą się na kilka typów (z wzbudzeniem niezależnym, równoległym, szeregowym i mieszanym).
Roczna produkcja maszyn prądu stałego w Federacji Rosyjskiej jest znacznie mniejsza niż produkcja maszyn AC, co wynika z wysokiego kosztu silników prądu stałego.
Najpierw powstały maszyny prądu stałego. Następnie zostały one w dużej mierze zastąpione maszynami prądu przemiennego. Dzięki możliwości płynnej i ekonomicznej regulacji prędkości obrotowej, silniki prądu stałego zachowują dominującą rolę w transporcie, do napędu maszyn metalurgicznych, w dźwigach i mechanizmach wyciągowych. W układach automatyki maszyny prądu stałego znajdują szerokie zastosowanie jako silniki wykonawcze, silniki do napędzania mechanizmów samonagrywających taśmę, jako tachogeneratory i wzmacniacze maszyn elektrycznych.
2. Budowa i zasada działania silników prądu stałego
Budowę maszyn prądu stałego (generatorów i silników) pokazano w uproszczeniu na rys. 1. Główne 2 i dodatkowe 4 bieguny są przymocowane do stalowej obudowy 1 stojana maszyny. Na biegunach głównych znajduje się uzwojenie wzbudzenia 3, na biegunach dodatkowych uzwojenie dodatkowych biegunów 5. Uzwojenie wzbudzenia wytwarza strumień magnetyczny F maszyny.
Ryc.1
Cylindryczny obwód magnetyczny 6 jest przymocowany do wału silnika 10, w rowkach, w których znajduje się uzwojenie twornika 7, przymocowane do komutatora 9. Stałe szczotki 8 są również dociskane do niego przez sprężyny przymocowany do wału silnika składa się z szeregu miedzianych płytek Za pomocą komutatora i szczotek uzwojenie twornika jest połączone z zewnętrznym obwód elektryczny. W silnikach służą one również do zamiany prądu obwodu zewnętrznego o stałym kierunku na prąd o zmiennym kierunku w przewodach uzwojenia twornika.
Dodatkowe bieguny z umieszczonym na nich uzwojeniem redukują iskrzenie pomiędzy szczotkami a komutatorem maszyny. Uzwojenie dodatkowych biegunów jest połączone szeregowo z uzwojeniem twornika i dalej schematy elektryczne często nie są przedstawiane.
Aby zmniejszyć straty mocy, obwód magnetyczny twornika jest wykonany z oddzielnego blachy stalowe. Wszystkie uzwojenia są wykonane z izolowany przewód. Oprócz silników z dwoma biegunami głównymi istnieją maszyny prądu stałego z czterema lub większą liczbą biegunów głównych. Jednocześnie odpowiednio zwiększa się liczba dodatkowych słupków i zestawów szczotek.
Jeśli silnik jest podłączony Napięcie stałe, a następnie po interakcji pole magnetyczne, wytworzony przez uzwojenie wzbudzenia i prąd w przewodach twornika, pojawia się moment obrotowy działający na twornik:
![]() (1)
(1)
gdzie KM jest współczynnikiem zależnym od parametry projektowe samochody; F - strumień magnetyczny jednego bieguna; I I - prąd twornika.
Jeżeli moment silnika przy n = 0 przekroczy moment hamowania, którym obciążony jest silnik, wówczas zwora zacznie się obracać. Wraz ze wzrostem prędkości obrotowej n wzrasta siła emf indukowana w tworniku. Prowadzi to do zmniejszenia prądu twornika:
![]() (3)
(3)
gdzie r I jest rezystancją twornika.
Konsekwencją zmniejszenia prądu I I jest zmniejszenie momentu obrotowego silnika. Kiedy momenty silnika i obciążenia są równe, prędkość obrotowa przestaje się zmieniać.
Kierunek momentu obrotowego silnika, a tym samym kierunek obrotu twornika, zależy od kierunku strumienia magnetycznego i prądu w przewodach uzwojenia twornika. Aby zmienić kierunek obrotu silnika, należy zmienić kierunek prądu twornika lub prądu pola.
3. Uruchamianie silników
Z wzoru (3) wynika, że w pierwszej chwili po włączeniu silnika w sieci napięcia stałego, tj. kiedy i
Ponieważ rezystancja r I jest niewielka, prąd twornika może być 10...30 razy większy niż prąd znamionowy silnika, co jest niedopuszczalne, ponieważ doprowadzi do silnego iskrzenia i zniszczenia komutatora. Ponadto przy takim prądzie występuje niedopuszczalnie wysoki moment obrotowy silnika, a przy częstych rozruchach możliwe jest przegrzanie uzwojenia twornika.
Aby zmniejszyć prąd rozruchowy w obwodzie twornika, dołączony jest rezystor rozruchowy, którego rezystancja zmniejsza się do zera wraz ze wzrostem prędkości silnika. Jeśli rozruch silnika jest zautomatyzowany, wówczas rezystor rozruchowy składa się z kilku stopni, które są wyłączane sekwencyjnie wraz ze wzrostem prędkości obrotowej.
Prąd rozruchowy twornika
![]()
W miarę przyspieszania silnika pole elektromagnetyczne w uzwojeniu twornika wzrasta, co wynika ze wzoru (3), prowadzi to do zmniejszenia prądu twornika I R. Dlatego wraz ze wzrostem prędkości obrotowej silnika rezystancja w obwodzie twornika maleje. Tak, że przy stosunkowo małym prąd rozruchowy Aby uzyskać duży moment rozruchowy, silnik uruchamiany jest przy największym strumieniu magnetycznym. W związku z tym prąd wzbudzenia przy rozruchu musi być maksymalnym dopuszczalnym, tj. nominalny.
4.Dane techniczne silników
Paszport silnika i literatura referencyjna dotycząca silników prądu stałego zawierają następujące dane techniczne: napięcie znamionowe U i moc P n, prędkość obrotowa n n, prąd I n, sprawność.
Przez znamionowe Un rozumiemy napięcie, dla którego zaprojektowano uzwojenie twornika i kolektor, a także, w większości przypadków, równoległe uzwojenie wzbudzenia. Biorąc pod uwagę napięcie znamionowe, dobiera się materiały elektroizolacyjne silnika.
Prąd znamionowy I n – maksimum dopuszczalny prąd(zużywany z sieci), przy którym silnik nagrzewa się maksymalnie dopuszczalna temperatura, pracujący w trybie (długoterminowym, przerywanym, krótkotrwałym), dla którego jest przeznaczony:
![]()
gdzie I yang to prąd twornika przy obciążeniu znamionowym; I vn – prąd uzwojenia wzbudzenia przy napięciu znamionowym.
Należy zauważyć, że prąd wzbudzenia Ivn silnika o wzbudzeniu równoległym jest stosunkowo niewielki, dlatego przy obciążeniu znamionowym zwykle przyjmuje się
Moc znamionowa P n to moc wytwarzana przez silnik na wale podczas pracy z obciążeniem znamionowym (momentem obrotowym) i przy prędkości znamionowej n n.
Prędkość obrotowa n n i sprawność odpowiadają pracy silnika przy prądzie I n, napięciu U n bez dodatkowych rezystorów w obwodach silnika.
W przypadek ogólny moc na wale P 2, moment obrotowy M i prędkość obrotowa n powiązane są zależnością:
Moc P 1 pobierana przez silnik z sieci, wartości P 2, sprawność, U, I są powiązane zależnościami:
Oczywiście zależności te obowiązują także dla nominalnego trybu pracy silnika.
5. Sprawność silnika DC
Współczynnik przydatna akcja jest najważniejszym wskaźnikiem silników prądu stałego. Im jest większy, tym mniejsza jest jednocześnie moc P i prąd pobierany przez silnik z sieci moc mechaniczna. W widok ogólny Zależność jest następująca:
![]() (9)
(9)
gdzie jest strata w uzwojeniu twornika;
- straty w uzwojeniu wzbudzenia;
Silniki są projektowane w taki sposób, aby maksymalna wartość sprawności znajdowała się w obszarze bliskim mocy znamionowej. Praca silników przy małych obciążeniach jest niepożądana ze względu na małe wartości r i. Wartości sprawności silnika z na różne sposoby wzbudzenie i moc od 1 do 100 kW przy obciążeniu znamionowym są różne i średnio wynoszą 0,8.
6.Charakterystyka silników prądu stałego
6.1. Charakterystyka wydajności
Pracownicy nazywani są regulacją, prędkością, momentem obrotowym i wydajnością. cechy.
Charakterystyka regulująca
Charakterystyka regulacji przedstawia zależność prędkości obrotowej P od prądu wzbudzenia Ib w przypadku, gdy prąd twornika Ia i napięcie sieciowe U pozostają niezmienione, tj. n=f(Iv) przy Ia=const i U=const.
Dopóki stal napędu magnetycznego maszyny nie jest nasycona, strumień Ф zmienia się proporcjonalnie do prądu wzbudzenia Iв. W tym przypadku charakterystyka sterowania jest hiperboliczna. W miarę nasycania się przy dużych prądach Iv charakterystyka zbliża się do liniowej (ryc. 2). Przy niskich wartościach prądu Iv prędkość obrotowa gwałtownie wzrasta. Dlatego też, gdy obwód wzbudzenia silnika o wzbudzeniu równoległym (Iv = 0) zostanie przerwany, jego prędkość obrotowa osiąga niedopuszczalne granice, jak mówią: „Silnik pracuje dziko”. Wyjątkiem mogą być mikrosilniki, które posiadają stosunkowo duży moment obrotowy biegu jałowego M0.

Ryż. 2. Charakterystyki sterowania silnikiem
W silnikach wzbudzenie sekwencyjne Iw = Ia. Przy małych obciążeniach prąd twornika Ia jest mały, a prędkość obrotowa może być zbyt duża, dlatego rozruch i praca przy małych obciążeniach jest niedopuszczalna. Mikrosilniki właśnie takie są. w poprzednim przypadku może stanowić wyjątek.
Charakterystyka prędkości.
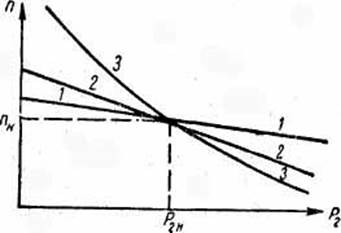
Charakterystyka prędkości podaje zależność prędkości obrotowej n od użyteczna moc P2 na wale silnika, jeśli napięcie U sieci i rezystancja rv reostatu regulacyjnego obwodu wzbudzenia pozostają niezmienione, tj. n=f(P2), gdzie U=const i rv = const.
Ryż. 3. Charakterystyka prędkości
Wraz ze wzrostem prądu twornika i wzrostem obciążenia mechanicznego silnika o wzbudzeniu równoległym, jednocześnie wzrasta spadek napięcia w tworniku i pojawia się reakcja twornika, która zwykle działa w sposób rozmagnesowujący. Pierwszy powód ma tendencję do zmniejszania prędkości obrotowej silnika, drugi - do jej zwiększania. Wpływ spadku napięcia na tworniku zwykle ma większy wpływ. Dlatego charakterystyka prędkościowa silnika o wzbudzeniu równoległym ma charakter lekko opadający (krzywa 1, rys. 3).
W silniku z uzwojeniem szeregowym prąd twornika jest prądem wzbudzenia. W rezultacie charakterystyka prędkościowa silnika o wzbudzeniu sekwencyjnym ma charakter zbliżony do hiperbolicznego. Wraz ze wzrostem obciążenia i nasyceniem obwodu magnetycznego charakterystyka staje się bardziej liniowa (krzywa 3 na ryc. 3).
W silniku złożonym, przy odpowiednim włączeniu uzwojeń, charakterystyka prędkości zajmuje położenie pośrednie pomiędzy charakterystykami silnika o wzbudzeniu równoległym i szeregowym (krzywa 2).
Charakterystyka momentu.
Charakterystyka momentu obrotowego pokazuje, jak zmienia się moment M wraz ze zmianą mocy użytecznej P2 na wale silnika, jeśli napięcie sieciowe U i rezystancja rv reostatu regulacyjnego w obwodzie wzbudzenia pozostają niezmienione, tj. M = f(P2), gdzie U = const, rv = const.
Przydatny moment obrotowy na wale silnika
Jeżeli prędkość obrotowa silnika o wzbudzeniu równoległym nie zmieniałaby się wraz z obciążeniem, to zależność momentu obrotowego Mmech od mocy użytecznej można by przedstawić graficznie w postaci linii prostej przechodzącej przez początek współrzędnych. W rzeczywistości prędkość obrotowa maleje wraz ze wzrostem obciążenia. Dlatego charakterystyka momentu użytecznego wygina się lekko w górę (krzywa 2, rys. 4). Jednocześnie krzywa moment elektromagnetyczny M przekracza użyteczną krzywą momentu obrotowego Mmech o stałą wartość równą momentowi obrotowemu M0 na biegu jałowym (krzywa 1).

Ryż. 4. Charakterystyka momentu
W silniku o wzbudzeniu szeregowym charakterystyka momentu obrotowego jest zbliżona do parabolicznej, ponieważ zmiana momentu obrotowego od prądu obciążenia następuje, zgodnie z prawem parabolicznym, aż do nasycenia stali. W miarę pojawiania się nasycenia zależność staje się bardziej liniowa (krzywa 4). W silniku złożonym charakterystyka momentu obrotowego (krzywa 3) zajmuje położenie pośrednie pomiędzy charakterystykami silnika o wzbudzeniu równoległym i szeregowym.
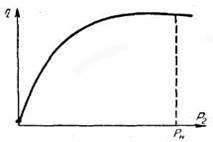
Charakterystyka zmian efektywności.
Krzywa sprawności w funkcji obciążenia ma charakterystyczną postać dla wszystkich silników (rys. 5). Krzywa przechodzi przez początek i szybko rośnie, gdy moc użyteczna wzrasta do 1/4 mocy znamionowej. Przy mocy P2 równej około 2/3 mocy znamionowej sprawność zwykle osiąga wartość maksymalną. Gdy obciążenie wzrasta do wartości znamionowej, wydajność pozostaje stała lub nieznacznie spada.
Ryż. 5. Zmiana sprawności silnika
6.2 Charakterystyka mechaniczna
Najważniejsza cecha silnik jest mechaniczny n(M). Pokazuje, jak prędkość obrotowa silnika zależy od rozwijanego momentu obrotowego. Jeśli uzwojenia silnika są podłączone napięcia znamionowe i w jego obwodach nie ma dodatkowych rezystorów, wówczas silnik ma charakterystykę mechaniczną zwaną naturalną. Na charakterystyce naturalnej znajduje się punkt odpowiadający nominalnym danym silnika (M n, P i itp.). Jeśli napięcie na uzwojeniu twornika jest niższe niż napięcie znamionowe lub I in< I вн, то двигатель будет иметь различные искусственные механические характеристики. На этих характеристиках двигатель работает при пуске, торможении, реверсе и регулировании частоты вращения.
Przekształcając wyrażenie (3) ze względu na prędkość obrotową otrzymujemy równanie charakterystyki elektromechanicznej n(I i):
![]() (7)
(7)
Po zastąpieniu prądu I i w równaniu (7) według wzoru (1) otrzymujemy równanie na charakterystykę mechaniczną n(M):
![]() (8)
(8)
Gdy Ф = const, charakterystyka elektromechaniczna n(I i) i mechaniczna n(M) silnika o wzbudzeniu równoległym są liniami prostymi. Ponieważ strumień magnetyczny zmienia się nieznacznie w wyniku reakcji twornika, charakterystyka jest w rzeczywistości nieco inna niż charakterystyka prosta.
Na biegu jałowym (M = 0) silnik pracuje na biegu jałowym określonym przez pierwszy wyraz równania (8). Wraz ze wzrostem obciążenia n maleje. Jak wynika z równania (8), wyjaśnia się to obecnością rezystancji twornika r.
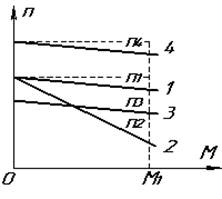
Ponieważ r i nie jest duże, prędkość obrotowa silnika zmienia się nieznacznie wraz ze wzrostem momentu obrotowego, a silnik ma sztywną naturalną charakterystykę mechaniczną (rys. 6, charakterystyka 1).
Z równania (8) wynika, że prędkość obrotową można regulować przy danym stałym obciążeniu (M = const) na trzy sposoby:
a) zmiana rezystancji obwodu twornika;
b) zmiana strumienia magnetycznego silnika;
c) zmiana napięcia na zaciskach twornika.
Ryż. 6 Charakterystyka mechaniczna
Aby regulować prędkość obrotową w pierwszy sposób w obwodzie twornika. należy uwzględnić dodatkowy opór r d. Następnie opór w równaniu (8) należy zastąpić r i + r d.
Jak wynika z równania (8), prędkość obrotowa n jest powiązana z rezystancją obwodu twornika r i + r d przy stałym obciążeniu (M = const) za pomocą zależności liniowej, tj. Wraz ze wzrostem oporu prędkość obrotowa maleje. Różne rezystancje rd odpowiadają różnym sztucznym właściwościom mechanicznym, z których jedną pokazano na ryc. 2 (charakterystyka 2). Korzystając z charakterystyki 2, przy danym momencie obrotowym M1, można otrzymać prędkość obrotową n2.
Zmiana prędkości obrotowej w drugi sposób odbywa się za pomocą regulowanego źródła napięcia UD2. Zmieniając jego napięcie za pomocą regulatora R2, można zmienić prąd wzbudzenia I V, a tym samym strumień magnetyczny silnika. Jak widać z równania (8), przy stałym obciążeniu (M = const), prędkość obrotowa ma złożoną zależność od strumienia magnetycznego F. Analiza równania (8) pokazuje, że w pewnym zakresie zmian pola magnetycznego strumień F, zmniejszenie tego ostatniego prowadzi do wzrostu prędkości obrotowej. To właśnie ten zakres zmienności przepływu jest używany przy regulacji prędkości obrotowej.
Każda wartość strumienia magnetycznego odpowiada sztucznej charakterystyce mechanicznej silnika, z których jedną pokazano na rys. 2 (charakterystyka 4). Wykorzystując charakterystykę 4 przy momencie M1 można uzyskać prędkość obrotową n4.
Aby regulować prędkość obrotową poprzez zmianę napięcia na zaciskach twornika, konieczne jest posiadanie stosunkowo mocnego regulowanego źródła napięcia. Każda wartość napięcia odpowiada sztucznej charakterystyce mechanicznej silnika, z których jedna jest pokazana w Ryc.2(cecha 3). Wykorzystując charakterystykę 3 przy danym momencie obrotowym M1 można otrzymać prędkość obrotową n3.
Wykaz używanej literatury
1. Katsman M.M. Maszyny elektryczne. -M.: Wyżej. szkoła, 1993.
2. Kopylov I.P. Maszyny elektryczne. -M.: Energoatomizdat, 1986