Ministerstwo Edukacji i Nauki Federacji Rosyjskiej
Federalna państwowa instytucja edukacyjna budżetowa
wyższe wykształcenie zawodowe
„Uniwersytet Państwowy Uralu Południowego”
Wydział Motoryzacji i Ciągników
Katedra „Eksploatacji Transportu Samochodowego”
Silnik asynchroniczny STRESZCZENIE z dyscypliny „Ogólna elektrotechnika i elektronika”
Sprawdzone przez________ /Krymsky V.V./______________20____ Autor pracy: uczeń grupy AT-262__________/Ivanov V.D./______________20____. Streszczenie jest zabezpieczone oceną (słownie, cyfrowo)_____________/ /______________20____.
Wstęp. 4
Asynchroniczne silniki elektryczne. 5
Wirnik klatkowy. Wirnik maszyny asynchronicznej typu klatkowego 6
Zwarte uzwojenie wirnika, często nazywane „klatką wiewiórczą” ze względu na zewnętrzne podobieństwo konstrukcji, składa się z prętów miedzianych lub aluminiowych zwartych na końcach dwoma pierścieniami. Pręty tego uzwojenia są włożone w rowki rdzenia wirnika. W małych iśrednia moc
Wirnik jest zwykle wytwarzany poprzez wlewanie stopionego stopu aluminium do szczelin w rdzeniu wirnika. Wraz z prętami klatkowymi odlane są pierścienie zwierające i łopatki końcowe, które zapewniają samowentylację samego wirnika i wentylację maszyny jako całości. W maszynach dużej mocy „klatka wiewiórcza” wykonana jest z prętów miedzianych, których końce są przyspawane do pierścieni zwierających. 6
Metody sterowania silnikiem asynchronicznym. 6 Zasada działania. 9
asynchroniczne silniki elektryczne
Wirnik ślizgowy. 10 Wirnik fazowy ma trójfazowy (cal przypadek ogólny
- wielofazowe), zwykle łączone w gwiazdę i wyprowadzane na pierścienie ślizgowe obracające się wraz z wałem maszyny. Za pomocą szczotek metalowo-grafitowych wsuwających się wzdłuż tych pierścieni do obwodu uzwojenia wirnika: 10
Rozruch silnika asynchronicznego z uzwojonym wirnikiem. 11
Metody sterowania silnikiem asynchronicznym. 12
Regulacja reostatyczna. 12
Podstawowe awarie silnika asynchronicznego z uzwojonym wirnikiem 14
Wniosek 15
Referencje 16
Wstęp.
Wirnik silnika jednofazowego ma taką samą konstrukcję jak trójfazowy silnik asynchroniczny. Powszechnie stosowane są jednofazowe asynchroniczne silniki elektryczne duża moc- do 2 kW. W domowych urządzeniach elektrycznych stosowane są jednofazowe asynchroniczne silniki elektryczne o mocy do 500 W. W przypadku elektrycznych jednofazowych silników asynchronicznych nie ma momentu początkowego (rozruchowego). Dlaczego jest tak, że gdy główne uzwojenie silnika jest podłączone do sieci jednofazowej, jego wirnik nie może się obracać.
Aby zapewnić rozruch silnika jednofazowego, na stojanie instalowane jest kolejne uzwojenie - uzwojenie rozruchowe. Jest on umieszczony pod kątem 90° w stosunku do uzwojenia głównego i jest połączony szeregowo z kondensatorem lub cewką indukcyjną. Kiedy uzwojenie początkowe i główne są podłączone do sieci, generowane przez nie strumienie magnetyczne tworzą wirujące pole magnetyczne. Z tego powodu pojawia się w wirniku prąd indukowany. Ze względu na oddziaływanie wirującego pola magnetycznego wytwarzanego przez prądy w uzwojeniach stojana i pole magnetyczne, wytworzony przez prąd indukcyjny w wirniku, wirnik zaczyna się obracać.
Podczas obracania się wirnika powstaje poślizg, dlatego uzwojenie początkowe w tym przypadku po prostu nie jest potrzebne i jest wyłączane za pomocą przełącznika bezwładnościowego (odśrodkowego) lub specjalnego przekaźnika. Trójfazowy silnik asynchroniczny może być również stosowany jako silnik jednofazowy. Jednak wadą tej metody jest konieczność stosowania drogich, dużych kondensatorów, ponieważ na każde 100 W mocy wymagany jest kondensator o pojemności około 10 μF.
Asynchroniczne silniki elektryczne.
Obecnie silniki asynchroniczne stanowią co najmniej 80% wszystkich silników elektrycznych produkowanych przez przemysł. Należą do nich również trójfazowe silniki asynchroniczne.
Trójfazowe asynchroniczne silniki elektryczne znajdują szerokie zastosowanie w urządzeniach automatyki i telemechaniki, sprzęcie gospodarstwa domowego i medycynie, urządzeniach rejestrujących dźwięk itp.
Maszyna asynchroniczna to maszyna elektryczna prądu przemiennego, której prędkość obrotowa wirnika nie jest równa (w trybie silnika mniejsza) częstotliwości obrotowej pola magnetycznego wytwarzanego przez prąd uzwojenia stojana.
W wielu krajach maszyny komutatorowe są również klasyfikowane jako maszyny asynchroniczne. W Rosji maszyny indukcyjne zaczęto nazywać maszynami asynchronicznymi.
Maszyny asynchroniczne stanowią obecnie większość maszyn elektrycznych. Stosowane są głównie jako silniki elektryczne i są głównymi przetwornikami energii elektrycznej na energię mechaniczną.
Zalety asynchronicznych silników elektrycznych:
Szeroką dystrybucję trójfazowych silników asynchronicznych tłumaczy się prostotą ich konstrukcji, niezawodnością działania, dobrymi właściwościami użytkowymi, niskim kosztem i łatwością konserwacji.
Wady:
1. Mały moment rozruchowy.
2. Znaczące prąd rozruchowy.
Maszyna asynchroniczna ma stojan i wirnik oddzielone szczeliną powietrzną. Jego aktywnymi częściami są uzwojenia i obwód magnetyczny; wszystkie pozostałe części mają charakter konstrukcyjny, zapewniający niezbędną wytrzymałość, sztywność, chłodzenie, rotację itp.
Uzwojenie stojana jest uzwojeniem trójfazowym (ogólnie wielofazowym), którego przewody są równomiernie rozmieszczone na obwodzie stojana i ułożone fazowo w szczelinach o odległości kątowej 120 el. grad Fazy uzwojenia stojana są połączone zgodnie standardowe schematy„trójkąt” lub „gwiazda” i podłącz do sieci prądu trójfazowego. Obwód magnetyczny stojana jest ponownie namagnesowany w procesie zmiany (obracania) strumienia magnetycznego uzwojenia wzbudzenia, dlatego jest wykonany z laminowanej (składającej się z płytek) stali elektrotechnicznej, aby zapewnić minimalne straty magnetyczne.
W oparciu o konstrukcję wirnika maszyny asynchroniczne dzielą się na dwa główne typy: z zwarty wirnik iz faza wirnik. Obydwa typy mają tę samą konstrukcję stojana i różnią się jedynie konstrukcją uzwojenia wirnika. Obwód magnetyczny wirnika wykonany jest podobnie jak obwód magnetyczny stojana - wykonany ze stali elektrotechnicznej i laminowanej.
Wirnik klatkowy. Wirnik maszyny asynchronicznej typu klatkowego.
Zwarte uzwojenie wirnika, często nazywane „klatką wiewiórczą” ze względu na zewnętrzne podobieństwo konstrukcji, składa się z prętów miedzianych lub aluminiowych zwartych na końcach dwoma pierścieniami. Pręty tego uzwojenia są włożone w rowki rdzenia wirnika. W maszynach małej i średniej mocy wirnik wykonuje się najczęściej poprzez wlanie roztopionego stopu aluminium w szczeliny rdzenia wirnika. Wraz z prętami klatkowymi odlane są pierścienie zwierające i łopatki końcowe, które zapewniają samowentylację samego wirnika i wentylację maszyny jako całości. W maszynach dużej mocy „klatka wiewiórcza” wykonana jest z prętów miedzianych, których końce są przyspawane do pierścieni zwierających.
Często szczeliny wirnika lub stojana są ukosowane, aby zmniejszyć pole elektromagnetyczne o wyższych harmonicznych spowodowane pulsacjami strumienia magnetycznego w wyniku obecności zębów, których opór magnetyczny jest znacznie niższy niż opór magnetyczny uzwojenia, a także w celu zmniejszenia hałas powodowany czynnikami magnetycznymi. Aby poprawić charakterystykę rozruchową asynchronicznego silnika elektrycznego z wirnikiem klatkowym, a mianowicie zwiększyć moment rozruchowy i zmniejszyć prąd rozruchowy, na wirniku zastosowano specjalny kształt rowka. W tym przypadku część rowka wirnika znajdująca się na zewnątrz osi obrotu ma mniejszy przekrój niż przekrój wewnętrzny. Pozwala to na wykorzystanie efektu przemieszczenia prądu, dzięki czemu rezystancja czynna uzwojenia wirnika wzrasta podczas dużych poślizgów (podczas rozruchu).
Silniki asynchroniczne z wirnik klatkowy mają mały moment rozruchowy i znaczny prąd rozruchowy, co jest istotną wadą „klatki wiewiórki”. Dlatego stosuje się je w napędach elektrycznych, gdzie nie są wymagane duże momenty rozruchowe. Zaletami są łatwość produkcji i brak mechanicznego kontaktu ze statyczną częścią maszyny, co gwarantuje trwałość i zmniejsza koszty konserwacji. Dzięki specjalnej konstrukcji wirnika, gdy obwód magnetyczny „wirnika” pozostaje nieruchomy, a w szczelinie magnetycznej obraca się tylko pusty w środku aluminiowy cylinder (klatka wiewiórcza lub zwarte uzwojenie wirnika), można uzyskać niską bezwładność silnika.
Projektowanie asynchronicznych silników elektrycznych z uzwojonym wirnikiem.
Głównymi częściami każdego silnika asynchronicznego są część stacjonarna - stojan i część obrotowa, zwana wirnikiem.
Stojan trójfazowego silnika asynchronicznego składa się z laminowanego rdzenia magnetycznego wciśniętego w odlewaną ramę. Na wewnętrznej powierzchni rdzenia magnetycznego znajdują się rowki do układania przewodów uzwojenia. Przewodniki te są bokami wielozwojowych miękkich cewek, które tworzą trzy fazy uzwojenia stojana. Osie geometryczne cewek są przesunięte w przestrzeni względem siebie o 120 stopni.
Fazy uzwojenia można łączyć w gwiazdę lub trójkąt, w zależności od napięcia sieci. Na przykład, jeśli karta katalogowa silnika wskazuje napięcia 220/380 V, to przy napięciu sieciowym 380 V fazy są połączone w gwiazdę. Jeśli napięcie sieciowe wynosi 220 V, wówczas uzwojenia są połączone w „trójkąt”. W obu przypadkach napięcie fazowe silnik jest na 220 V.
Wirnik trójfazowego silnika asynchronicznego jest cylindrem wykonanym z tłoczonych arkuszy stali elektrycznej i zamontowanym na wale. W zależności od rodzaju uzwojenia wirniki trójfazowych silników asynchronicznych dzielą się na klatkowe i fazowe.
Dolivo-Dobrovolsky jako pierwszy stworzył silnik z wirnikiem klatkowym i zbadał jego właściwości. Dowiedział się, że takie silniki mają bardzo poważną wadę - ograniczony moment rozruchowy. Dolivo-Dobrovolsky podał przyczynę tego niedociągnięcia - mocno zwarty wirnik. Zaproponował także konstrukcję silnika z uzwojonym wirnikiem.
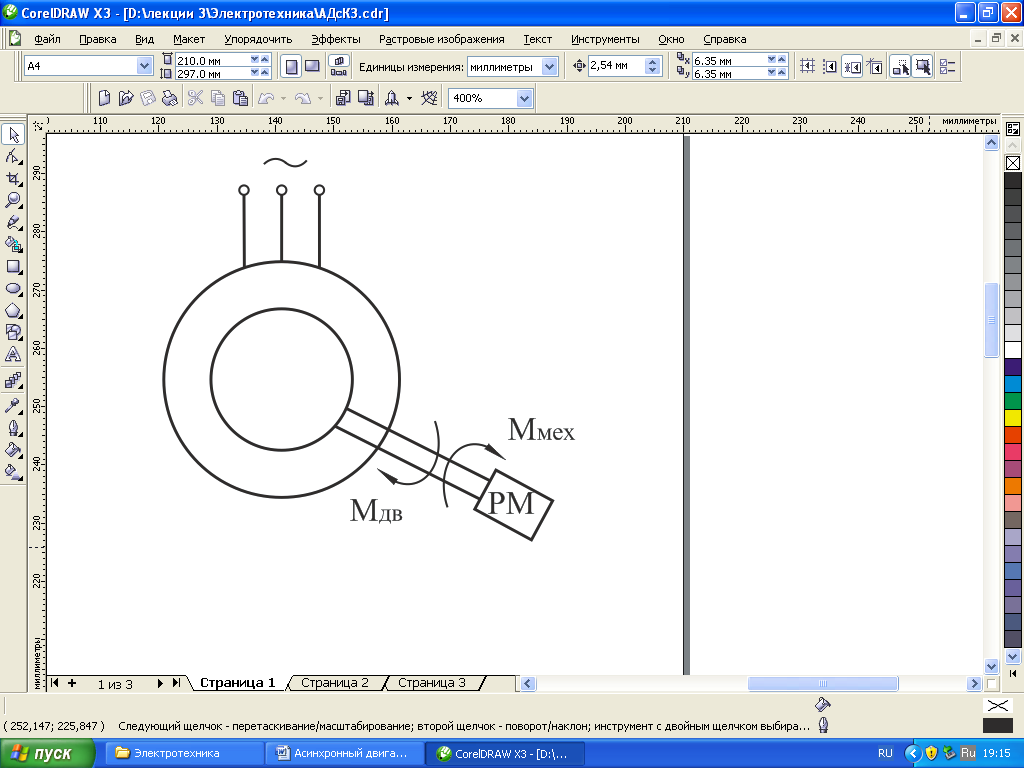
Na ryc. przedstawia przekrój poprzeczny maszyny asynchronicznej z uzwojonym wirnikiem: 1 - rama, 2 - uzwojenie stojana, 3 - wirnik, 4 - pierścienie ślizgowe, 5 - szczotki.
W wirniku uzwojonym uzwojenie jest trójfazowe, podobnie jak uzwojenie stojana, z taką samą liczbą par biegunów. Zwoje uzwojenia są umieszczone w rowkach rdzenia wirnika i połączone w sposób gwiazdowy. Końce każdej fazy są połączone z pierścieniami ślizgowymi przymocowanymi do wału wirnika i wyprowadzone do obwodu zewnętrznego za pomocą szczotek. Pierścienie ślizgowe są wykonane z mosiądzu lub stali i muszą być izolowane od siebie oraz od wału. Jako szczotki stosuje się szczotki metalowo-grafitowe, które dociskane są do pierścieni ślizgowych za pomocą sprężyn uchwytowych szczotek zamocowanych na stałe w korpusie maszyny. Na ryc. Podano symbol silnika asynchronicznego z wirnikiem klatkowym (a) i wirnikiem z uzwojeniem fazowym (b).

W asynchronicznych silnikach elektrycznych większej mocy i specjalnych maszynach małej mocy, wirniki z uzwojeniem fazowym stosuje się w celu poprawy właściwości rozruchowych i sterujących. W tych przypadkach na wirniku umieszcza się uzwojenie trójfazowe, którego osie geometryczne cewek fazowych (1) są przesunięte w przestrzeni względem siebie o 120 stopni.
Fazy uzwojenia są połączone gwiazdą, a ich końce są połączone z trzema pierścieniami ślizgowymi (3), zamontowanymi na wale (2) i odizolowanymi elektrycznie zarówno od wału, jak i od siebie. Za pomocą szczotek (4), które stykają się ślizgowo z pierścieniami (3), możliwe jest włączenie reostatów regulacyjnych (5) w obwody uzwojenia fazowego.
Silnik asynchroniczny z wirnikiem uzwojonym ma lepsze właściwości rozruchowe i sterujące, ale charakteryzuje się większą masą, rozmiarami i kosztem niż silnik asynchroniczny z wirnikiem klatkowym.
Zasada działania asynchronicznych silników elektrycznych.
Zasada działania maszyny asynchronicznej opiera się na wykorzystaniu wirującego pola magnetycznego. Po podłączeniu do sieci trójfazowego uzwojenia stojana powstaje wirujące pole magnetyczne, którego prędkość kątowa jest określona przez częstotliwość sieci f oraz liczbę par biegunów uzwojenia p, tj. ω1=2πf/p
Pole to, przechodząc przez przewody uzwojenia stojana i wirnika, indukuje w uzwojeniach pole elektromagnetyczne (zgodnie z prawem indukcji elektromagnetycznej). Kiedy uzwojenie wirnika jest zamknięte, jego pole elektromagnetyczne indukuje prąd w obwodzie wirnika. W wyniku oddziaływania prądu z powstałym polem magnetycznym powstaje moment elektromagnetyczny. Jeżeli moment ten przekroczy moment oporu na wale silnika, wał zaczyna się obracać i napędzać mechanizm roboczy. Zwykle prędkość kątowa wirnika ω2 nie jest równa prędkości kątowej pola magnetycznego ω1, zwanej synchroniczną. Stąd nazwa silnika jest asynchroniczna, tj. niesynchroniczne.
Działanie maszyny asynchronicznej charakteryzuje się poślizgiem s, czyli różnicą względną prędkości kątowe pole ω1 i wirnik ω2: s= (ω1-ω2) /ω1

Wartość i znak poślizgu w zależności od prędkości kątowej wirnika względem pola magnetycznego określają tryb pracy maszyny asynchronicznej. Zatem w idealnym stanie jałowym wirnik i pole magnetyczne obracają się z tą samą częstotliwością w tym samym kierunku, poślizg s = 0, wirnik jest nieruchomy względem wirującego pola magnetycznego, pole elektromagnetyczne w jego uzwojeniu nie jest indukowane, prąd wirnika i moment elektromagnetyczny maszyny wynoszą zero. Podczas rozruchu wirnik w pierwszej chwili jest nieruchomy: ω2=0, s=1. Ogólnie rzecz biorąc, poślizg w trybie silnika waha się od s=1 przy rozruchu do s=0 w idealnym trybie jałowym.
Gdy wirnik obraca się z prędkością ω2>ω1 w kierunku obrotu pola magnetycznego, poślizg staje się ujemny. Maszyna przechodzi w tryb generatora i wytwarza moment hamowania. Gdy wirnik obraca się w kierunku przeciwnym do kierunku obrotu pola magnetycznego (s>1), maszyna asynchroniczna przechodzi w tryb przeciwbieżny i również wytwarza moment hamujący. Zatem w zależności od poślizgu rozróżnia się tryby silnikowy (s=1÷0), generatorowy (s=0÷-∞) oraz tryb przeciwprzełączeniowy (s=1÷+∞). Tryby generatora i cofania służą do hamowania silników asynchronicznych.
Wirnik ślizgowy.
Wirnik fazowy ma uzwojenie trójfazowe (ogólnie wielofazowe), zwykle połączone w gwiazdę i połączone z pierścieniami ślizgowymi, które obracają się wraz z wałem maszyny. Za pomocą szczotek metalowo-grafitowych przesuwających się wzdłuż tych pierścieni do obwodu uzwojenia wirnika:
zawierają reostat balastowy, który pełni rolę dodatkowego rezystora czynnego, takiego samego dla każdej fazy. Zmniejszając prąd rozruchowy, osiągają wzrost momentu rozruchowego do wartości maksymalnej (w pierwszym momencie). Silniki takie służą do napędzania mechanizmów pracujących pod dużym obciążeniem lub wymagających płynnej regulacji prędkości.
uwzględnić indukcyjności (dławiki) w każdej fazie wirnika. Rezystancja dławików zależy od częstotliwości przepływającego prądu i jak wiadomo, w wirniku w pierwszej chwili rozruchu częstotliwość prądów ślizgowych jest największa. W miarę obracania się wirnika maleje częstotliwość indukowanych prądów, a wraz z nią maleje rezystancja cewki indukcyjnej. Reaktancja indukcyjna w obwodzie uzwojonego wirnika pozwala zautomatyzować procedurę rozruchu silnika i, jeśli to konieczne, „podnieść” silnik, którego prędkość spadła z powodu przeciążenia. Indukcyjność utrzymuje prądy wirnika na stałym poziomie.
podaj źródło DC uzyskując w ten sposób maszynę synchroniczną.
uwzględnia moc z falownika, co pozwala kontrolować charakterystykę prędkości i momentu obrotowego silnika. Jest to specjalny tryb pracy (maszyna o podwójnej mocy). Możliwe jest włączenie napięcia sieciowego bez falownika, z fazą przeciwną do tej, z której zasilany jest stojan.
Rozruch silnika asynchronicznego z uzwojonym wirnikiem.
Warunki rozruchu silnika asynchronicznego z wirnikiem z uzwojeniem fazowym można znacznie poprawić kosztem pewnych komplikacji w konstrukcji i konserwacji silnika.
Ponieważ Ponieważ rezystancja czynna uzwojenia fazowego wirnika jest stosunkowo mała, to aby uzyskać maksymalny początkowy moment rozruchowy, konieczne jest włączenie w obwód wirnika reostatu rozruchowego z rezystancją fazową
Gdy tylko wirnik zacznie się obracać, poślizg maleje, a wraz z nim pole elektromagnetyczne i prąd wirnika, w wyniku czego zmniejsza się moment obrotowy. Aby silnik w dalszym ciągu rozwijał moment obrotowy zbliżony do maksymalnego, należy stopniowo zmniejszać opór rezystora rozruchowego. Wreszcie, gdy silnik osiągnie prędkość znamionową, następuje zwarcie reostatu rozruchowego.
Aby zmniejszyć straty mechaniczne i zużycie pierścieni i szczotek, silniki czasami wyposaża się w urządzenie do podnoszenia szczotek i zwierania pierścieni.
Im większy powinien być moment rozruchowy, im bliżej maksymalnego momentu obrotowego, tym większy będzie prąd rozruchowy. Z tego powodu tylko dla szczególnie trudnych warunków rozruchu reostat dobiera się tak, aby moment rozruchowy był równy maksimum.
Aby mieć pewność, że reostat rozruchowy nie przegrzeje się w czasie rozruchu, jego moc powinna być w przybliżeniu równa mocy silnika. W silnikach dużej mocy reostaty rozruchowe są wykonane z chłodzeniem oleju.
Oczywiście zastosowanie reostatu rozruchowego znacznie poprawia warunki rozruchu silnika asynchronicznego, zwiększając moment rozruchowy i zmniejszając prąd rozruchowy.
Metody sterowania silnikiem asynchronicznym.
Napędzany silnikiem asynchronicznym AC odnosi się do zmiany prędkości wirnika i/lub jego momentu obrotowego. Istnieją następujące sposoby sterowania silnikiem asynchronicznym:
reostat - zmiana prędkości obrotowej IM z uzwojonym wirnikiem poprzez zmianę rezystancji reostatu w obwodzie wirnika, dodatkowo zwiększa to moment rozruchowy;
częstotliwość - zmiana częstotliwości obrotów IM poprzez zmianę częstotliwości prądu w sieci zasilającej, co pociąga za sobą zmianę częstotliwości obrotów pola stojana. Silnik włączany jest poprzez przetwornicę częstotliwości
przełączenie uzwojeń z obwodu „gwiazda” na obwód „trójkąt” podczas procesu rozruchu silnika, co powoduje około trzykrotne zmniejszenie prądów rozruchowych w uzwojeniach, ale jednocześnie zmniejsza moment obrotowy;
pulsacyjny - poprzez dostarczenie specjalnego rodzaju napięcia zasilania (na przykład piłokształtnego);
wprowadzenie dodatkowych e. d. z zgodnie z częstotliwością poślizgu lub w przeciwnym kierunku obwód wtórny.
zmianę liczby par biegunów, jeżeli konstrukcyjnie przewidziano takie łączenie (tylko dla wirników zwarciowych);
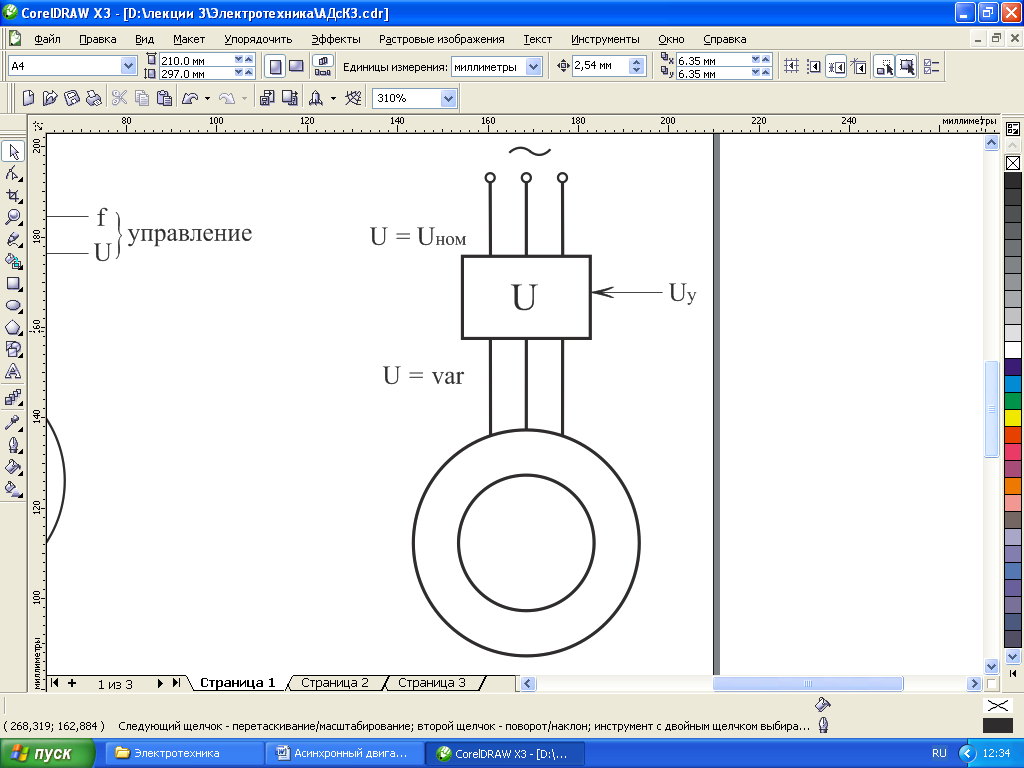
zmianę amplitudy napięcia zasilającego, gdy zmienia się tylko amplituda (lub wartość skuteczna) napięcia sterującego. Wówczas wektory napięcia sterującego i wzbudzenia pozostają prostopadłe (rozruch autotransformatora);
sterowanie fazowe charakteryzuje się tym, że zmianę prędkości obrotowej wirnika uzyskuje się poprzez zmianę przesunięcia fazowego pomiędzy wektorami napięcia wzbudzenia i napięcia sterującego;
metoda amplitudowo-fazowa obejmuje dwie opisane metody;
włączenie w obwód mocy stojana reaktora;
reaktancja indukcyjna dla silnika z uzwojonym wirnikiem.
Regulacja reostatu.
W trójfazowych silnikach asynchronicznych z uzwojonym wirnikiem do regulacji prędkości wirnika stosuje się metodę reostatu. Osiąga się to poprzez wprowadzenie regulowanego reostatu trójfazowego do obwodu uzwojeń fazowych wirnika, tak jak podczas uruchamiania silnika. Ale ten reostat musi być zaprojektowany długotrwałe obciążenie prąd wirnika, a nie krótkotrwały, jak reostat rozruchowy. Zwiększenie rezystancji czynnej obwodu wirnika powoduje zmianę charakterystyki M BP (s) - sprawia, że jest bardziej miękki. Jeżeli przy stałym momencie obrotowym na wale silnika, rezystancja czynna obwodu wirnika zostanie zwiększona poprzez stopniowe zwiększanie rezystancji reostatu ( R P 1 < R P 2 < R P 3 ), wówczas punkt pracy będzie miał jedną krzywą M BP (s) do następnego, odpowiadającego zwiększonemu oporowi obwodu wirnika, odpowiednio zwiększa się poślizg, a w konsekwencji maleje prędkość obrotowa silnika. W ten sposób można zmieniać prędkość wirnika w zakresie od nominalnego do całkowitego zatrzymania. Wadą tej metody regulacji są stosunkowo duże straty energii.
Podstawowe awarie silnika asynchronicznego z uzwojonym wirnikiem
|
Awaria |
Możliwy powód |
|
Nie rozwija znamionowej prędkości obrotowej i buczy |
Jednostronne przyciąganie wirnika na skutek: a) zużycia łożysk; b) niewspółosiowość tarcz łożyskowych; c) zginanie wału |
|
Słabo rozwija prędkość i buczy, prąd we wszystkich trzech fazach jest inny i równy na biegu jałowym przekracza nominalną |
1. Uzwojenia są źle podłączone i jedna z faz jest „odwrócona do góry nogami” 2. Uszkodzone pręt uzwojenia wirnika |
|
Wirnik nie obraca się lub obraca się powoli, silnik szumi |
Faza uzwojenia stojana jest zerwana |
|
Całe auto wibruje |
1. Wycentrowanie połówek sprzęgła lub współosiowość wałów jest zakłócone 2. Wirnik, koło pasowe i połówki sprzęgła są niewyważone |
|
Wibracje znikają po odłączeniu od sieci, prąd w fazach stojana staje się nierówny, jedna z sekcji uzwojenia stojana szybko się nagrzewa |
Zwarcie w uzwojeniu stojana |
|
Przegrzewa się przy przeciążeniach znamionowych |
1. Zwarcie w uzwojeniu stojana 2. Zanieczyszczenie uzwojeń lub kanałów wentylacyjnych |
|
Niski opór |
1. Wilgoć lub zanieczyszczenie uzwojeń. 2. Starzenie się izolacji |
Wniosek
Powszechnie stosowane są trójfazowe asynchroniczne silniki elektryczne z wirnikiem klatkowym gospodarka narodowa jednak takie silniki mają wiele wad: brak płynnej kontroli prędkości, wysoki prąd rozruchowy itp. Ale wszystko to można obejść, jeśli zamiast wirnika zastosuje się uzwojony wirnik.
Wirnik fazowy jest umieszczony w odpowiedni sposób: uzwojenie trójfazowe umieszczone jest w żłobkach wirnika (uzwojenie jest podobne do uzwojenia stojana); fazy uzwojenia wirnika są połączone gwiazdą; początki faz są połączone z trzema pierścieniami stykowymi wykonanymi z mosiądzu lub miedzi, które z kolei są osadzone na tym samym wale z wirnikiem. Odpowiednio pierścienie ślizgowe są odizolowane od siebie i od wału. Szczotki metalowo-grafitowe lub węglowe zamontowane na uchwycie szczotki zamontowanym na tarczy łożyska są dobrze dociśnięte do pierścieni stykowych.
Aby uruchomić silnik z uzwojonym wirnikiem, szczotki są podłączone do reostatów sterujących lub rozruchowych. Te same reostaty umożliwiają zmniejszenie prądu rozruchowego, ponieważ z ich powodu wzrasta całkowity opór uzwojenia wirnika.
Reostaty służą do płynnego sterowania prędkością obrotową silnika, a także do zmiany innych charakterystyk pracy.
Referencje
1. Projektowanie maszyn elektrycznych: Podręcznik dla uniwersytetów Książka 1. Pod redakcją Kopylova I.P. Moskwa: Energoatomizdat 1993. - 464 s.
2. Maszyny elektryczne: Maszyny asynchroniczne: Podręcznik. Dla elektromechanika. specjalista. Uniwersytety / Radin V.I., Bruskin D.E., Zorohovich A.E.; wyd. IP Kopylov-M.: Szkoła wyższa, 1988, -328 s.
Kuzniecow M.I. Podstawy elektrotechniki. Przewodnik po studiach. wyd. 10., poprawiony „Szkoła Absolwentka”
Silnik asynchroniczny z wirnikiem klatkowym (AM S KZR)
Nazywa się urządzenia, które przekształcają energię elektryczną (wejściową) w energię mechaniczną (wyjściową). silniki elektryczne .
Energia mechaniczna jest niezbędna do działania maszyn i mechanizmów produkcyjnych.
składa się ciśnienie krwi składa się ze stojana (część stała) i wirnika (część ruchoma).
W skład stojana wchodzą: obudowa; obwód magnetyczny (rdzeń), składający się z cienkich stalowych płytek; trzy uzwojenia (cewki), przesunięte między sobą o 120°, które wpasowują się w rowki rdzenia magnetycznego.
Wirnik zawiera: wał, obwód magnetyczny, zwarte (w postaci klatki wiewiórkowej) uzwojenie.
Symbol
Z wirnikiem połączony jest mechanizm produkcyjny, który działa jako obciążenie silnika.
Zalety silnika: proste, tanie, niezawodne.
Wady: słabe właściwości rozruchowe, tj. niski moment rozruchowy, wysoki prąd rozruchowy, a także pobór prądu biernego z sieci.
ZASADA DZIAŁANIA
U 1 → I 1 → F 1 (wirujące pole magnetyczne)→ mi 2 (MI 1 ) → I 2
W wyniku oddziaływania I 2 z Ф powstaje moment M [Nm].
M = DOI 2 F cosψ 2,
gdzie ψ 2 jest przesunięciem fazowym między E 2 i I 2, pod wpływem którego wirnik zaczyna się obracać.
W IM występuje ASYNCHRONICZNOŚĆ (nierówność) rotacji pola magnetycznego n 1 i wirnika n 2. Z powodu tego asynchronicznego ruchu w wirniku zachodzą procesy elektryczne (E 2 i I 2). Stopień asynchronii szacuje się przesuwając S w jednostkach względnych lub procentach:
![]() ,
[%],
,
[%],
n 1 - częstotliwość obrotu pola magnetycznego.
P p - liczba par bieguny magnetyczne pola: 1, 2, 3... itd.;
f to bieżąca częstotliwość.
Jeśli f nom = 50 Hz, to = 3000, 1500, 1000 obr/min itd., w zależności od liczby par biegunów silnika.
Z (1) mamy ![]() .
.
Praca silnika rozpoczyna się wówczas od n 2 = 0 (start).
(maksymalny poślizg).
Teoretycznie maksymalna prędkość wirnika przy braku obciążenia n 2 = n 1
Zakres zmian S wynosił od 1 (minimalna prędkość wirnika) do 0 (maksymalna prędkość wirnika).
CHARAKTERYSTYKA MECHANICZNA PIEKŁA - główna charakterystyka IM, pokazująca, jak zmienia się prędkość wirnika pod wpływem obciążenia. Cechę tę można uzyskać operacyjnie lub poprzez obliczenia przy użyciu wzorów:
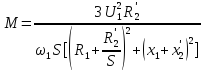 (1)
(1)
Podając S we wzorach (1) i (2), można znaleźć n.
Podając obciążenie M, można znaleźć poślizg, a co za tym idzie, n 2.
Ta charakterystyka mechaniczna ma postać:
|
|
|

W cechach możemy wyróżnić 4 główne punkty i odpowiednio 3 działki. Rozważ te punkty:
1 - prędkość biegu jałowego (silnik obraca się bez obciążenia).
Współrzędne tego punktu (n 2 = n 1, M=0);
2 - tryb nominalny - występuje przy obciążeniu równym maksymalnemu dopuszczalnemu w długotrwałych warunkach pracy.
Współrzędne tego punktu (n 2 = n nom, M = M nom) są wskazane w paszporcie;
3 - obciążenie krytyczne, przy którym silnik rozwija maksymalny moment obrotowy.
Współrzędne tego punktu (S cr lub n cr; M = M max = M cr).
Gdy obciążenie jest większe niż krytyczne, silnik nie jest w stanie sobie z nim poradzić, co prowadzi do zatrzymania;
4 - punktu początkowego, od tego momentu uruchamiany jest silnik.
Współrzędne tego punktu (n 2 = 0, M = M n)
Wszystkie współrzędne można znaleźć w danych paszportowych silnika.
Witryny 1-3 - stabilna praca, gdy obciążenie silnika wynosi od 0 do Mcr, silnik ma zdolność dostosowania się do obciążenia i zwiększenia swojego momentu obrotowego (siły), co nie prowadzi do zatrzymania silnika.
3-4 - charakteryzuje się rozruchem silnika, praca w tym obszarze jest niestabilna;
W tym przypadku:
1-2 - możliwa jest długoterminowa praca, w której prąd pobierany z sieci nie przekracza maksymalnego dopuszczalnego, tj. znamionowego.
2-3 - dopuszczalna jest tylko krótkotrwała eksploatacja, gdyż przy takich obciążeniach I silnika > I nom i możliwe jest przegrzanie silnika.
CHARAKTERYSTYKA MECHANICZNA n=f(M), otrzymane w nominalnych warunkach pracy, tj. przy U=U nom, f=f nom i naturalny wzór inkluzje (bez dodatkowych elementów) nazywa się NATURALNY.
REGULACJA PRĘDKOŚCI BP Z KZR
Jak wynika ze wzoru
![]()
na częstotliwość obrotu można wpływać poprzez zmianę częstotliwości obrotu pola magnetycznego
Zmieniając częstotliwość napięcia zasilającego f 1 (za pomocą specjalnych przetwornic) lub zmieniając liczbę par biegunów P p (zmieniając obwód cewek stojana).
W obu przypadkach wielkość poślizgu pozostaje praktycznie niezmieniona.
Również prędkość obrotową silnika można zmieniać wpływając na poślizg S. Można tego dokonać zmieniając napięcie zasilające silnik lub zmieniając rezystancję wirnika (o ile pozwala na to konstrukcja wirnika).
CHARAKTERYSTYKA MECHANICZNA, otrzymany w warunkach pracy innych niż nominalne, nazywa się SZTUCZNY.
Rozważmy te metody.
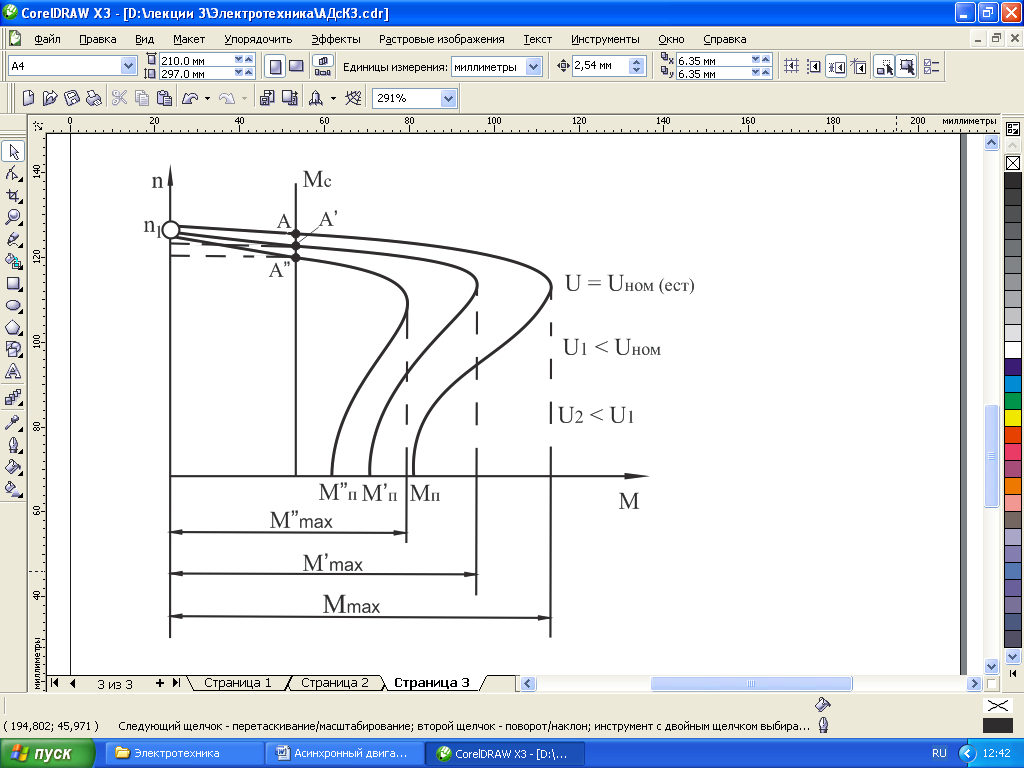
WPŁYW CZĘSTOTLIWOŚCIFPRZY PRĘDKOŚCI SILNIKA
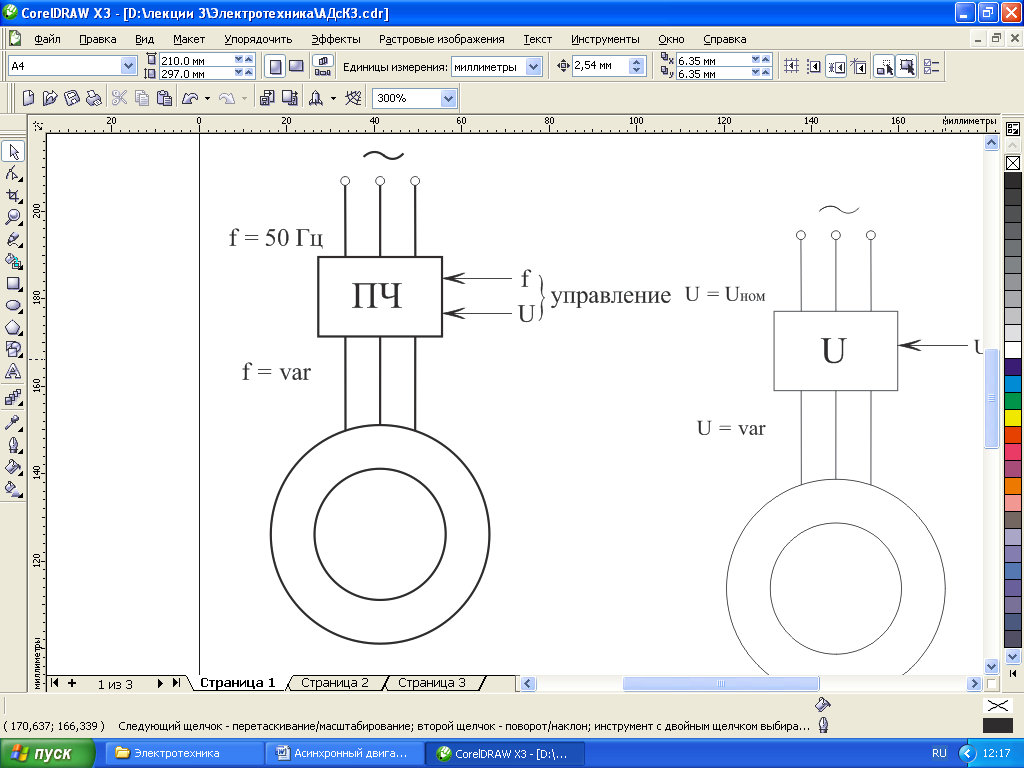
Z teorii maszyn wiadomo, że aby zapewnić efektywną pracę silnika z regulacją częstotliwości, należy zmieniać dostarczane napięcie wraz ze zmianą f tak, aby stosunek U/f pozostał stały. Oczywiście warunek ten można spełnić jedynie poprzez zmniejszenie f<50 Гц, потому что уменьшение напряжения U
Wraz ze wzrostem f>50 Hz należy proporcjonalnie zwiększyć napięcie U>U nom, jednak nie jest to dopuszczalne ze względu na warunki pracy silnika. Okoliczność ta znajdzie odzwierciedlenie w postaci właściwości mechanicznych.
Należy zauważyć, że w każdym przypadku, gdy zmienia się f, zmieni się również częstotliwość obrotu pola magnetycznego (tj. położenie punktu n 1 na charakterystyce mechanicznej). Zatem położenie punktu n 1 może być wskazówką przy przedstawianiu sztucznych właściwości mechanicznych.

Jeśli podamy charakterystykę mechaniczną charakterystyki mechanicznej mechanizmu (niech M c = const, gdzie M c jest momentem oporu), to możemy oszacować zakres regulacji prędkości dla regulacji częstotliwości, gdzie A, A", A" są punktami pracy uzyskanymi pod warunkiem M dv = M s.
Zalety metody częstotliwościowej regulacji prędkości ciśnienia krwi: płynność regulacji: płynnie zmieniając f, otrzymujemy duża liczba sztuczne cechy, a co za tym idzie prędkości; duży zakres z możliwością regulacji w górę i w dół od wartości nominalnej (regulacja dwustrefowa).
Wady: konieczność montażu przetwornicy częstotliwości, co znacznie zwiększa koszt napędu elektrycznego.
KONTROLA POLA przewiduje możliwość zmiany liczby par biegunów P p. Metoda ta jest możliwa tylko w przypadku specjalnych - wielobiegowych silników asynchronicznych i osiągana jest poprzez przełączenie poszczególnych sekcji tworzących cewkę (uzwojenie) stojana z połączenia szeregowego do równoległego lub odwrotnie, a liczba par biegunów w połączeniu szeregowym jest 2 razy większa niż w przypadku połączenia równoległego, czyli szeregowego P p. =2P p równolegle. , a zatem ![]() .
.
Oczywiście położenie punktu n 1 na charakterystyce mechanicznej zmieni się 2 razy.
Zalety kontroli biegunów: łatwość wdrożenia, brak specjalnych urządzeń przetwarzających w obwodzie zasilania silnika.
Wady: regulacja krokowa, mały zakres regulacji.
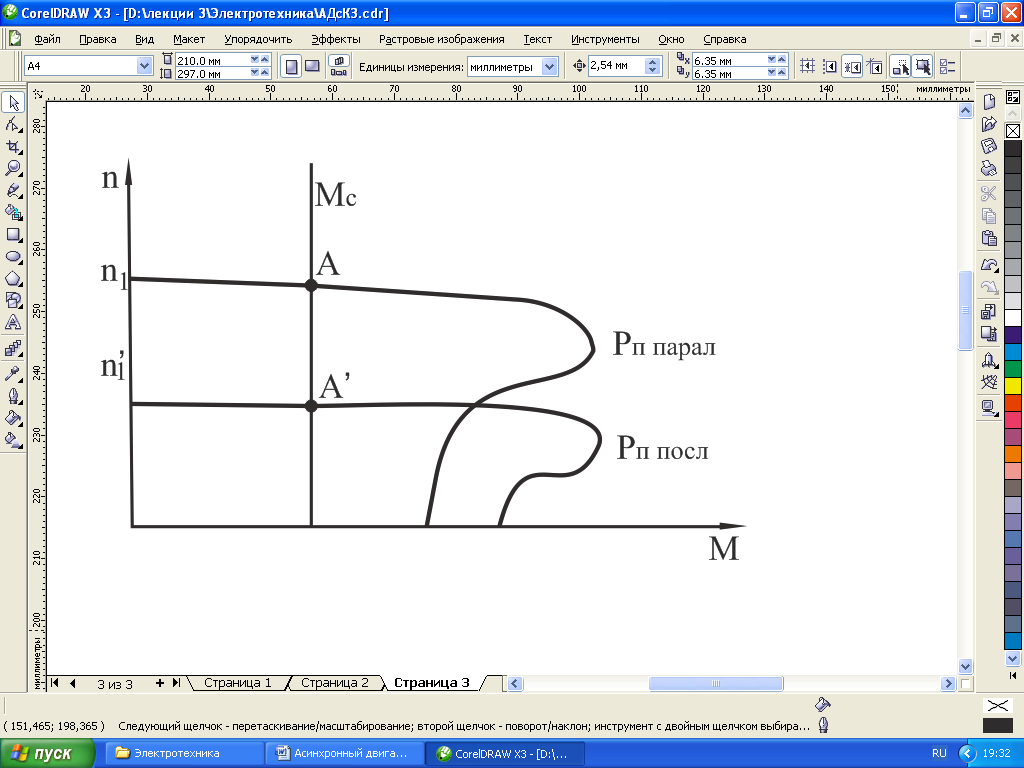
KONTROLA PRĘDKOŚCI POPRZEZ ZMIANĘ NAPIĘCIA ZASILANIAU
Dzięki tej metodzie częstotliwość obrotu pola magnetycznego () pozostaje stała, a częstotliwość obrotu wirnika zmienia się w wyniku poślizgu. Można to wytłumaczyć faktem, że wraz ze spadkiem napięcia zasilania M silnika znacznie maleje (zależność kwadratowa), co przy tym samym obciążeniu prowadzi do zmniejszenia prędkości, a w konsekwencji do poślizgu. Konstruując sztuczne charakterystyki mechaniczne, wychodzimy z faktu, że punkt n 1 odpowiadający częstotliwości obrotu pola magnetycznego nie ulegnie zmianie, napięcie U można zmieniać jedynie w kierunku spadku, a co za tym idzie, momenty M p i Mmax zmniejszy się, ponieważ M~ U2.
Wada: mały zakres regulacji prędkości (oszacowanie prędkości podczas pracy w punktach A, A, A"). Dlatego tę metodę regulacja jest rzadko stosowana.
Wykłady na maszyny elektryczne
Silnik asynchroniczny z wirnikiem klatkowym (Rys. 249 i 250) składa się z następujących głównych części: stojana z uzwojeniem trójfazowym, wirnik klatkowy i szkielet Uzwojenie wirnika jest wykonany bezdotykowo (nie jest podłączony do żadnego obwodu zewnętrznego), co decyduje wysoka niezawodność taki silnik.
Układ magnetyczny.Maszyna asynchroniczna W przeciwieństwie do maszyny prądu stałego nie ma wyraźnych biegunów. Taki układ magnetyczny nazywa się nie wystający biegun. O liczbie biegunów w maszynie decyduje liczba cewek w uzwojeniu stojana i schemat ich połączeń. W maszynie czterobiegunowej (ryc. 251) układ magnetyczny składa się z czterech identycznych gałęzi, wzdłuż których przechodzi połowa strumienia magnetycznego Ф p jednego bieguna, w maszynie dwubiegunowej są dwie takie gałęzie, w maszyna sześciobiegunowa - sześć itd. Ponieważ wszystkie elementy układu magnetycznego przechodzą przez zmienny strumień magnetyczny, to nie tylko wirnik 1, ale
Ryż. 249. Silnik asynchroniczny z wirnikiem klatkowym: 1 - rama; 2 - stojan; 3 - wirnik; 4 - pręty uzwojenia wirnika; 5 - tarcza łożyska; 6 - łopatki wirnika wentylacyjnego; 7 - wentylator; 8 - skrzynka zaciskowa
 Ryż. 250. Schemat elektryczny silnik asynchroniczny z wirnikiem klatkowym (a) i jego tryb warunkowy obraz graficzny(b): 1 - stojan; 2 - wirnik
Ryż. 250. Schemat elektryczny silnik asynchroniczny z wirnikiem klatkowym (a) i jego tryb warunkowy obraz graficzny(b): 1 - stojan; 2 - wirnik
 Ryc.251. Pole magnetyczne czterobiegunowej maszyny asynchronicznej
Ryc.251. Pole magnetyczne czterobiegunowej maszyny asynchronicznej
 Ryż. 252. Blachy wirnika (a) i stojana (b)
Ryż. 252. Blachy wirnika (a) i stojana (b)
 Ryż. 253. Pakiet złożony ze stojana (a) i stojana z uzwojeniem (b)
Ryż. 253. Pakiet złożony ze stojana (a) i stojana z uzwojeniem (b)
i stojan 2 wykonany jest z arkuszy stali elektrotechnicznej (ryc. 252), odizolowanych od siebie izolacyjną warstwą lakieru, zgorzeliną itp. W rezultacie szkodliwy efekt prądy wirowe powstające w stali stojana i wirnika podczas obrotu pola magnetycznego. Arkusze stojana i wirnika są otwarte, półzamknięte lub forma zamknięta, w którym znajdują się przewodniki odpowiednich uzwojeń. W stojanie najczęściej stosuje się półzamknięte szczeliny o kształcie prostokątnym lub owalnym, w maszynach dużej mocy - szczeliny otwarte kształt prostokątny.
Rdzeń stojana 1 (ryc. 253, a) jest wciskany w odlewaną ramę 3 i zabezpieczany śrubami blokującymi. Rdzeń wirnika jest dociskany do wału wirnika, który obraca się w łożyskach kulkowych osadzonych w dwóch tarczach łożyskowych. Szczelina powietrzna pomiędzy stojanem a wirnikiem ma minimalny rozmiar, akceptowalne z punktu widzenia dokładności montażu i sztywności mechanicznej konstrukcji. W silnikach małej i średniej mocy szczelina powietrzna wynosi zwykle kilka dziesiątych milimetra. Szczelina ta zapewnia zmniejszenie oporu magnetycznego obwodu magnetycznego maszyny, a co za tym idzie zmniejszenie prądu magnesującego potrzebnego do wytworzenia strumienia magnetycznego w silniku. Zmniejszenie prądu magnesowania pozwala zwiększyć współczynnik mocy silnika.
Uzwojenie stojana. Wykonany jest w postaci szeregu cewek okrągłych lub przekrój prostokątny. Przewody umieszczone w rowkach są połączone, tworząc rząd cewek 2 (ryc. 253, b). Cewki są podzielone na identyczne grupy według liczby faz, które są rozmieszczone symetrycznie na obwodzie stojana (ryc. 254, a) lub wirnika. W każdej takiej grupie wszystkie cewki są połączone elektrycznie, tworząc jedną fazę uzwojenia, czyli oddzielną obwód elektryczny. Na duże wartości prąd fazowy lub, jeśli konieczne jest przełączenie poszczególnych cewek, fazy mogą mieć kilka równoległych gałęzi. Najprostszym elementem uzwojenia jest zwój (ryc. 254, b), składający się z dwóch przewodów 1 i 2, umieszczonych w rowkach znajdujących się w pewnej odległości od siebie -
 Ryż. 254. Lokalizacja cewek uzwojenie trójfazowe na stojanie silnika asynchronicznego (a) i zwoju dwóch przewodów (b)
Ryż. 254. Lokalizacja cewek uzwojenie trójfazowe na stojanie silnika asynchronicznego (a) i zwoju dwóch przewodów (b)
ty Odległość ta jest w przybliżeniu równa podziałowi jednego bieguna m, co jest rozumiane jako długość łuku odpowiadającego jednemu biegunowi.
Zazwyczaj zwoje utworzone przez przewody leżące w tych samych szczelinach są łączone w jedną lub dwie cewki. Czasami nazywa się je sekcjami. Ułożone są w taki sposób, że w każdym rowku mieści się jedna strona cewki lub dwie strony - jedna nad drugą. Zgodnie z tym rozróżnia się uzwojenia jedno- i dwuwarstwowe. Głównym parametrem określającym rozkład uzwojenia pomiędzy żłobkami jest liczba żłobków q na biegun i fazę.
W uzwojeniu stojana silnika dwubiegunowego (patrz ryc. 254, a) każda faza (A-X; B-Y; C-Z) składa się z trzech cewek, których boki znajdują się w trzech sąsiednich szczelinach, tj. q = 3. Zwykle q > 1 , takie uzwojenie nazywa się dystrybuowane.
Najbardziej rozpowszechnione są uzwojenia rozproszone dwuwarstwowe. Ich sekcje 1 (ryc. 255, a) są umieszczone w szczelinach 2 stojana w dwóch warstwach. Przewody uzwojenia stojana są wzmocnione w rowkach klinami tekstolitowymi 5 (ryc. 255, b), które są umieszczone na główkach zębów.
Ściany rowka pokryte są arkuszowym materiałem izolacyjnym 4 (tektura elektryczna, tkanina lakierowana itp.). Przewody leżące w rowkach są ze sobą w odpowiedni sposób połączone od strony czołowej maszyny. Nazywa się je łączącymi je przewodami części czołowe. Ponieważ części czołowe nie biorą udziału w indukowaniu e. itp., są one wykonywane tak krótko, jak to możliwe.
Poszczególne cewki uzwojenia stojana można połączyć w gwiazdę lub trójkąt. Początki i końce uzwojeń każdej fazy są doprowadzone do sześciu zacisków silnika.
Uzwojenie wirnika. Uzwojenie wirnika wykonane jest w formie klatki wiewiórkowej (ryc. 256,a). Wykonany jest z prętów miedzianych lub aluminiowych, zwartych na końcach dwoma pierścieniami (ryc. 256, b). Pręty tego uzwojenia są wkładane w szczeliny wirnika bez żadnej izolacji, ponieważ napięcie w zwartym uzwojeniu wirnika wynosi zero.
 Ryż. 255. Dwuwarstwowe uzwojenie stojana silnika asynchronicznego: 1 - sekcja; 2 - rowek; 3 - dyrygent; 4 - materiał izolacyjny; 5 - klin; 6 - ząb
Ryż. 255. Dwuwarstwowe uzwojenie stojana silnika asynchronicznego: 1 - sekcja; 2 - rowek; 3 - dyrygent; 4 - materiał izolacyjny; 5 - klin; 6 - ząb
 Ryż. 256. Wirnik klatkowy: a - klatka wiewiórkowa; b - wirnik z klatką wiewiórkową z prętów; c - wirnik z odlaną klatką wiewiórkową; 1 - pierścienie zwierające; 2- pręty; 3-wał; 4 - rdzeń wirnika; 5 - łopatki wentylacyjne; 6 - pręty klatkowe odlewane
Ryż. 256. Wirnik klatkowy: a - klatka wiewiórkowa; b - wirnik z klatką wiewiórkową z prętów; c - wirnik z odlaną klatką wiewiórkową; 1 - pierścienie zwierające; 2- pręty; 3-wał; 4 - rdzeń wirnika; 5 - łopatki wentylacyjne; 6 - pręty klatkowe odlewane
Rowki wirnika klatkowego są zwykle wykonane półzamknięte, a w maszynach małej mocy - zamknięte (rowek posiada stalową obręcz oddzielającą go od szczeliny powietrznej). Taki kształt rowka pozwala dobrze wzmocnić przewody uzwojenia wirnika, choć nieznacznie zwiększa jego rezystancję indukcyjną.
W silnikach o mocy do 100 kW pręty klatkowe uzyskuje się zwykle poprzez wlanie stopionego aluminium w rowki rdzenia wirnika (ryc. 256, c). Wraz z prętami klatki wiewiórki odlewane są również łączące je końcowe pierścienie zwarciowe.
Do tego celu nadaje się aluminium, ponieważ ma małą gęstość, dość wysoką przewodność elektryczną i łatwo się topi.
Silniki mają zwykle wentylatory zamontowane na wale wirnika. Wykonują wymuszona wentylacja nagrzane części maszyny (uzwojenia oraz stal stojana i wirnika), co pozwala na uzyskanie większej mocy z silnika. W silnikach z wirnikiem klatkowym łopatki wentylatora są często odlewane razem z bocznymi pierścieniami klatki wiewiórkowej (patrz ryc. 256, c).
Silniki asynchroniczne z wirnikiem klatkowym charakteryzują się prostą konstrukcją i niezawodnością w działaniu. Znajdują szerokie zastosowanie do napędzania maszyn do obróbki metalu i innych urządzeń, które rozpoczynają pracę bez obciążenia. Jednak stosunkowo niski moment rozruchowy tych silników i duży prąd rozruchowy nie pozwalają na ich zastosowanie do napędzania maszyn i mechanizmów, które muszą być uruchamiane natychmiastowo pod dużym obciążeniem (przy dużym obciążeniu) moment rozruchowy). Do takich maszyn zaliczają się urządzenia podnoszące, sprężarki itp.
Można zwiększyć moment rozruchowy i zmniejszyć prąd rozruchowy wykonując klatkę wiewiórkową o zwiększonym oporze czynnym. W takim przypadku silnik będzie miał zwiększony poślizg i duże straty mocy w uzwojeniu wirnika. Takie silniki nazywane są silnikami o zwiększonym poślizgu (oznaczane jako AC). Można nimi napędzać maszyny, które pracują stosunkowo krótko. Jeden. p.s. Silniki prądu przemiennego (o poślizgu do 10%) służą do napędzania sprężarek, które pracują okresowo przez krótkie okresy czasu, gdy ciśnienie w zbiornikach powietrza spadnie poniżej określonej wartości granicznej.
Silniki o zwiększonym momencie rozruchowym. Silniki asynchroniczne klatkowe o podwyższonym momencie rozruchowym mają specjalną konstrukcję wirnika (oznaczoną AP). Należą do nich silniki z podwójnym klatkiem i silniki z głębokim rowkiem.
Wirnik 3 (ryc. 257,a) podwójnego silnika klatkowego ma dwa zwarte uzwojenia. Klatka zewnętrzna 1 jest klatką startową. Ma wysoką aktywność aktywną i niską reaktancję. Klatka wewnętrzna 2 to uzwojenie głównego wirnika; wręcz przeciwnie, ma niewielką aktywną i wysoką reaktancję. W początkowej chwili rozruchu prąd przepływa głównie przez klatkę zewnętrzną, co wytwarza znaczny moment obrotowy. Wraz ze wzrostem prędkości obrotowej prąd przepływa do klatki wewnętrznej, a pod koniec procesu rozruchu maszyna pracuje normalnie silnik klatkowy z jedną (wewnętrzną) komórką. Przemieszczenie prądu do ogniwa zewnętrznego w początkowej chwili rozruchu tłumaczy się działaniem, np. ds. samoindukcja indukowana w przewodnikach wirnika. Im niżej przewodnik znajduje się w rowku, tym większy jest strumień upływu magnetycznego 6, który jest pokryty i tym większy jest e. ds. Indukuje się w nim samoindukcja (ryc. 257, c), dlatego tym większy będzie opór indukcyjny.
Przemieszczenie prądu do górnych przewodów wirnika ma silny wpływ, gdy wirnik jest nieruchomy, gdy częstotliwość prądu indukowanego w obu ogniwach wirnika jest duża. W tym przypadku rezystancje indukcyjne obu ogniw są znacznie większe od ogniw aktywnych, a prąd rozkłada się pomiędzy nimi odwrotnie proporcjonalnie do ich rezystancji indukcyjnych, czyli przepływa głównie przez ogniwo zewnętrzne o dużej rezystancji czynnej.
Wraz ze wzrostem prędkości wirnika częstotliwość prądu w nim będzie się zmniejszać (wirujące pole magnetyczne będzie przechodzić przez przewody wirnika z mniejszą częstotliwością), a prąd zacznie przepływać przez oba ogniwa zgodnie z ich aktywnymi rezystancjami, tj. głównie przez komórkę wewnętrzną.
Tym samym proces rozruchu silnika z podwójną klatką klatkową jest podobny do procesu rozruchu silnika asynchronicznego z uzwojonym wirnikiem, gdy na początku rozruchu do obwodu uzwojenia wirnika wprowadzany jest dodatkowy opór czynny (reostat rozruchowy). , a w miarę postępu przyspieszania opór ten zanika. Podobnie w rozpatrywanym silniku prąd na początku rozruchu przepływa przez klatkę zewnętrzną o dużej rezystancji czynnej, a następnie w miarę przyspieszania stopniowo przechodzi do klatki wewnętrznej o małej rezystancji czynnej.
Ryż. 257. Projektowanie wirników silników asynchronicznych o podwyższonym momencie rozruchowym: z podwójnym koszykiem wiewiórczym (a), z głębokimi rowkami (b) i odcinkami ich rowków (c i d)
Aby zwiększyć opór czynny klatki startowej, jej pręty wykonane są z mosiądzu manganowego lub brązu. Pręty klatki roboczej wykonane są z miedzi, która ma niską oporność, a ich powierzchnia przekroju poprzecznego jest większa niż powierzchnia komory startowej. W rezultacie aktywny opór ogniwa początkowego wzrasta 4-5 razy w porównaniu do działającego. Pomiędzy prętami obu ogniw znajduje się wąska szczelina 5, której wymiary określają indukcyjność ogniwa roboczego. Silnik dwuklatkowy jest o 20–30% droższy niż silnik klatkowy o konwencjonalnej konstrukcji. Aby uprościć technologię produkcji wirników, silniki dwuklatkowe małej i średniej mocy wykonuje się z klatką odlaną z aluminium.
Działanie silników z głębokimi rowkami (ryc. 257, b) również opiera się na wykorzystaniu zjawiska przemieszczenia prądu. W silnikach tych pręty klatkowe 4 wykonane są w postaci wąskich prętów miedzianych umieszczonych w głębokich rowkach wirnika 3 (wysokość rowka jest 10-12 razy większa niż jego szerokość). Dolne warstwy prętów, położone dalej od powierzchni wirnika, są znacznie przykryte duża liczba Lini magnetycznych strumienia rozproszenia jest 6 w stosunku do górnych (ryc. 257d), dlatego mają one wielokrotnie większą indukcyjność. Na początku rozruchu, w wyniku zwiększonej reaktancji indukcyjnej dolnych części prętów, prąd przepływa głównie przez nie górne części. W tym przypadku wykorzystuje się tylko niewielką część przekroju każdego pręta, co prowadzi do wzrostu jego rezystancji czynnej, a w konsekwencji do wzrostu rezystancji czynnej całego uzwojenia wirnika.
Wraz ze wzrostem prędkości wirnika zmniejsza się przemieszczenie prądu w górne części prętów (z tego samego powodu, co w silniku z podwójną klatką klatkową), a po zakończeniu rozruchu prąd rozkłada się równomiernie na ich krzyżach obszar przekroju.