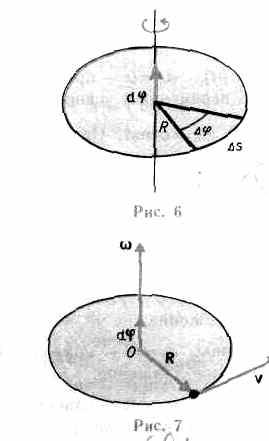
Considere un cuerpo rígido que gira alrededor de un eje fijo. Luego, los puntos individuales de este cuerpo describirán círculos de diferentes radios, cuyos centros se encuentran en el eje de rotación. Deje que algún punto se mueva a lo largo de un círculo de radio. R(Figura 6). Su posición después de un período de tiempo t fijemos el ángulo . Los ángulos de rotación elementales (infinitesimales) se consideran vectores. Módulo vectorial d es igual al ángulo de rotación y su dirección coincide con la dirección del movimiento de traslación de la punta del tornillo, cuya cabeza gira en la dirección del movimiento del punto a lo largo del círculo, es decir, obedece regla del tornillo correcto(Figura 6). Los vectores cuyas direcciones están asociadas con la dirección de rotación se llaman pseudovectores o vectores axiales. Estos vectores no tienen puntos de aplicación específicos: se pueden trazar desde cualquier punto del eje de rotación.
velocidad angular es una cantidad vectorial igual a la primera derivada del ángulo de rotación de un cuerpo con respecto al tiempo:
El vector “b se dirige a lo largo del eje de rotación según la regla del tornillo derecho, es decir, lo mismo que el vector d (Fig. 7). Dimensión de la velocidad angular dim=T -1 , a . Su unidad es radianes por segundo (rad/s).
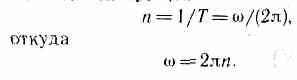
Velocidad lineal de un punto (ver Fig. 6)
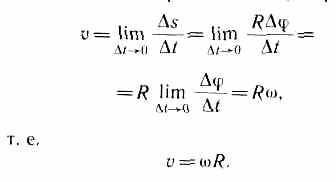
En forma vectorial, la fórmula para la velocidad lineal se puede escribir como un producto vectorial:
En este caso, el módulo del producto vectorial, por definición, es igual a ![]()
Y la dirección es la misma. Con la dirección del movimiento de traslación del tornillo derecho cuando gira de a R.
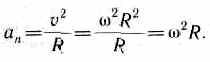
Si =const, entonces la rotación es uniforme y se puede caracterizar periodo de rotaciónt- el tiempo durante el cual la punta realiza una revolución completa, es decir, gira un ángulo de 2. Dado que el período de tiempo t=T corresponde a =2, entonces = 2/T, de donde
![]()
El número de revoluciones completas que da un cuerpo durante su movimiento circular uniforme por unidad de tiempo se llama velocidad de rotación:
aceleración angular es una cantidad vectorial igual a la primera derivada de la velocidad angular con respecto al tiempo:
Cuando un cuerpo gira alrededor de un eje fijo, el vector de aceleración angular se dirige a lo largo del eje de rotación hacia el vector del incremento elemental de velocidad angular. Durante el movimiento acelerado, el vector

está codirigido con el vector (Fig. 8), cuando se desacelera, es opuesto a él (Fig. 9).
Componente tangencial de la aceleración.

Componente normal de la aceleración.
Así, la conexión entre lineales (la longitud del camino recorrido por un punto a lo largo de un arco de círculo de radio R, velocidad lineal v, aceleración tangencial a , aceleración normal a norte) y cantidades angulares (ángulo de rotación , velocidad angular (o, aceleración angular) se expresa mediante las siguientes fórmulas:
En el caso de movimiento uniforme de un punto a lo largo de un círculo (=const)
donde 0 es la velocidad angular inicial.
Preguntas de seguridad
¿Cómo se llama un punto material? ¿Por qué se introduce un modelo así en mecánica?
¿Qué es un marco de referencia?
¿Qué es un vector de desplazamiento? ¿La magnitud del vector de desplazamiento es siempre igual al segmento de trayectoria?
pasó el punto?
¿Qué tipo de movimiento se llama traslacional? ¿rotacional?
Definir vectores velocidad promedio y aceleración media, velocidad instantánea
y aceleración instantánea. ¿Cuáles son sus direcciones?
¿Qué caracteriza la componente tangencial de la aceleración? componente normal
¿aceleración? ¿Cuáles son sus módulos?
¿Son posibles movimientos en los que no hay aceleración normal? tangencial
¿aceleración? Dar ejemplos.
¿Qué es la velocidad angular? aceleración angular? ¿Cómo se determinan sus direcciones?
¿Cuál es la relación entre cantidades lineales y angulares?
Tareas
1.1. La dependencia del tiempo del camino recorrido por un cuerpo viene dada por la ecuación s = A+Bt+Ct 2 + DT 3 (CON= 0,1 m/s2, D= 0,03m/s3). Determine: 1) después de cuánto tiempo después del inicio del movimiento la aceleración a del cuerpo será igual a 2 m/s 2; 2) aceleración media<а>cuerpos durante este período de tiempo. [1) 10 s; 2) 1,1 m/s 2 ]
1.2. Despreciando la resistencia del aire, determine el ángulo con el que el cuerpo es lanzado hacia el horizonte si la altura máxima de elevación del cuerpo es igual a 1/4 de su rango de vuelo.
1.3. rueda de radio R= 0,1 m gira de modo que la dependencia de la velocidad angular con el tiempo viene dada por la ecuación = 2At+5Bt 4 (A=2 rad/s 2 y B=1 rad/s 5). Determine la aceleración total de los puntos de la llanta de la rueda a través de t= 1 s después del inicio de la rotación y el número de revoluciones realizadas por la rueda durante este tiempo. [a = 8,5 m/s2; norte = 0,48]
1.4. Aceleración normal de un punto que se mueve en una circunferencia de radio r. = 4 m, dado por la ecuación A norte =Un+-Bt+Ct 2 (A=1m/s2, EN=6m/s3, CON=3m/s4). Determine: 1) aceleración tangencial del punto; 2) el camino recorrido por el punto durante el tiempo t 1 =5 s después del inicio del movimiento; 3) aceleración total durante el tiempo t 2 =1 s. [ 1) 6 m/s 2 ; 2) 85 metros; 3) 6,32 m/s 2 ]
1.5. Velocidad de rotación de la rueda en cámara lenta uniforme. t=1 min disminuyó de 300 a 180 min -1 . Determine: 1) aceleración angular de la rueda; 2) el número de revoluciones completas realizadas por la rueda durante este tiempo.
1.6. Un disco con radio R=10 cm gira alrededor de un eje fijo, de modo que la dependencia del ángulo de rotación del radio del disco con el tiempo viene dada por la ecuación = A+BT+CT 2 +Dt 3 (B= l rad/s, CON=1 rad/s 2, D=l rad/s 3). Determinar para puntos en la llanta de la rueda al final del segundo segundo después del inicio del movimiento: 1) aceleración tangencial a ; 2) aceleración normal a norte; 3) aceleración total a. [1) 0,14 m/s2; 2) 28,9 m/s2; 3) 28,9 m/s 2 ]
Considere un cuerpo rígido que gira alrededor de un eje fijo. Luego, los puntos individuales de este cuerpo describirán círculos de diferentes radios, cuyos centros se encuentran en el eje de rotación. Deje que algún punto se mueva a lo largo de un círculo de radio. R(Figura 6). Su posición después de un período de tiempo t fijemos el ángulo . Los ángulos de rotación elementales (infinitesimales) se consideran vectores. Módulo vectorial d es igual al ángulo de rotación y su dirección coincide con la dirección del movimiento de traslación de la punta del tornillo, cuya cabeza gira en la dirección del movimiento del punto a lo largo del círculo, es decir, obedece regla del tornillo correcto(Figura 6). Los vectores cuyas direcciones están asociadas con la dirección de rotación se llaman pseudovectores o vectores axiales. Estos vectores no tienen puntos de aplicación específicos: se pueden trazar desde cualquier punto del eje de rotación.
velocidad angular es una cantidad vectorial igual a la primera derivada del ángulo de rotación de un cuerpo con respecto al tiempo:
El vector “b se dirige a lo largo del eje de rotación según la regla del tornillo derecho, es decir, lo mismo que el vector d (Fig. 7). Dimensión de la velocidad angular dim=T -1 , a . Su unidad es radianes por segundo (rad/s).
Velocidad lineal de un punto (ver Fig. 6)
En forma vectorial, la fórmula para la velocidad lineal se puede escribir como un producto vectorial:
En este caso, el módulo del producto vectorial, por definición, es igual a ![]()
Y la dirección es la misma. Con la dirección del movimiento de traslación del tornillo derecho cuando gira de a R.
Si =const, entonces la rotación es uniforme y se puede caracterizar periodo de rotaciónt- el tiempo durante el cual la punta realiza una revolución completa, es decir, gira un ángulo de 2. Dado que el período de tiempo t=T corresponde a =2, entonces = 2/T, de donde
![]()
El número de revoluciones completas que da un cuerpo durante su movimiento circular uniforme por unidad de tiempo se llama velocidad de rotación:
aceleración angular es una cantidad vectorial igual a la primera derivada de la velocidad angular con respecto al tiempo:
Cuando un cuerpo gira alrededor de un eje fijo, el vector de aceleración angular se dirige a lo largo del eje de rotación hacia el vector del incremento elemental de velocidad angular. Durante el movimiento acelerado, el vector
está codirigido con el vector (Fig. 8), cuando se desacelera, es opuesto a él (Fig. 9).
Componente tangencial de la aceleración.
Componente normal de la aceleración.
Así, la conexión entre lineales (la longitud del camino recorrido por un punto a lo largo de un arco de círculo de radio R, velocidad lineal v, aceleración tangencial a , aceleración normal a norte) y cantidades angulares (ángulo de rotación , velocidad angular (o, aceleración angular ) se expresan mediante las siguientes fórmulas:
En el caso de movimiento uniforme de un punto a lo largo de un círculo (=const)
donde 0 es la velocidad angular inicial.
Preguntas de seguridad
¿Cómo se llama un punto material? ¿Por qué se introduce un modelo así en mecánica?
¿Qué es un marco de referencia?
¿Qué es un vector de desplazamiento? ¿La magnitud del vector de desplazamiento es siempre igual al segmento de trayectoria?
pasó el punto?
¿Qué tipo de movimiento se llama traslacional? ¿rotacional?
Definir los vectores de velocidad media y aceleración media, velocidad instantánea.
y aceleración instantánea. ¿Cuáles son sus direcciones?
¿Qué caracteriza la componente tangencial de la aceleración? componente normal
¿aceleración? ¿Cuáles son sus módulos?
¿Son posibles movimientos en los que no hay aceleración normal? tangencial
¿aceleración? Dar ejemplos.
¿Qué es la velocidad angular? aceleración angular? ¿Cómo se determinan sus direcciones?
¿Cuál es la relación entre cantidades lineales y angulares?
Tareas
1.1. La dependencia del tiempo del camino recorrido por un cuerpo viene dada por la ecuación s = A+Bt+Ct 2 + DT 3 (CON= 0,1 m/s2, D= 0,03m/s3). Determine: 1) después de cuánto tiempo después del inicio del movimiento la aceleración a del cuerpo será igual a 2 m/s 2; 2) aceleración media<а>cuerpos durante este período de tiempo. [1) 10 s; 2) 1,1 m/s 2 ]
1.2. Despreciando la resistencia del aire, determine el ángulo con el que el cuerpo es lanzado hacia el horizonte si la altura máxima de elevación del cuerpo es igual a 1/4 de su rango de vuelo.
1.3. rueda de radio R= 0,1 m gira de modo que la dependencia de la velocidad angular con el tiempo viene dada por la ecuación = 2At+5Bt 4 (A=2 rad/s 2 y B=1 rad/s 5). Determine la aceleración total de los puntos de la llanta de la rueda a través de t= 1 s después del inicio de la rotación y el número de revoluciones realizadas por la rueda durante este tiempo. [a = 8,5 m/s2; norte = 0,48]
1.4. Aceleración normal de un punto que se mueve en una circunferencia de radio r. = 4 m, dado por la ecuación A norte =Un+-Bt+Ct 2 (A=1m/s2, EN=6m/s3, CON=3m/s4). Determine: 1) aceleración tangencial del punto; 2) el camino recorrido por el punto durante el tiempo t 1 =5 s después del inicio del movimiento; 3) aceleración total durante el tiempo t 2 =1 s. [ 1) 6 m/s 2 ; 2) 85 metros; 3) 6,32 m/s 2 ]
1.5. Velocidad de rotación de la rueda en cámara lenta uniforme. t=1 min disminuyó de 300 a 180 min -1 . Determine: 1) aceleración angular de la rueda; 2) el número de revoluciones completas realizadas por la rueda durante este tiempo.
1.6. Un disco con radio R=10 cm gira alrededor de un eje fijo, de modo que la dependencia del ángulo de rotación del radio del disco con el tiempo viene dada por la ecuación = A+BT+CT 2 +Dt 3 (B= l rad/s, CON=1 rad/s 2, D=l rad/s 3). Determinar para puntos en la llanta de la rueda al final del segundo segundo después del inicio del movimiento: 1) aceleración tangencial a ; 2) aceleración normal a norte; 3) aceleración total a. [1) 0,14 m/s2; 2) 28,9 m/s2; 3) 28,9 m/s 2 ]
Longitud y distancia Masa Medidas de volumen de sólidos a granel y alimentos Área Volumen y unidades de medida en recetas culinarias Temperatura Presión, tensión mecánica, módulo de Young Energía y trabajo Potencia Fuerza Tiempo Velocidad lineal Ángulo plano Eficiencia térmica y eficiencia de combustible Números Unidades para medir la cantidad de información Tipos de cambio Dimensiones ropa de mujer y zapatos Tallas de ropa y zapatos de hombre Velocidad angular y frecuencia de rotación Aceleración Aceleración angular Densidad Volumen específico Momento de inercia Momento de fuerza Torque Calor específico de combustión (en masa) Densidad de energía y calor específico de combustión del combustible (en volumen) Diferencia de temperatura Coeficiente expansión térmica Resistencia térmica Conductividad térmica Calor específico Exposición a la energía, potencia de radiación térmica Densidad flujo de calor Coeficiente de transferencia de calor Flujo volumétrico flujo de masa Caudal molar Densidad de flujo másico Concentración molar Concentración másica en solución Viscosidad dinámica (absoluta) Viscosidad cinemática Tensión superficial Permeabilidad al vapor Permeabilidad al vapor, tasa de transferencia de vapor Nivel sonoro Sensibilidad del micrófono Nivel de presión sonora (SPL) Brillo Intensidad luminosa Iluminación Resolución en gráficos por computadora Frecuencia y longitud de onda Potencia óptica en dioptrías y longitud focal Potencia óptica en dioptrías y aumento de la lente (×) carga electrica Densidad de carga lineal Densidad superficial carga Volumen densidad de carga Corriente eléctrica Densidad de corriente lineal Densidad de corriente superficial Voltaje campo eléctrico Potencial electrostático y tensión Resistencia eléctrica Específica resistencia electrica Conductividad eléctrica Conductividad eléctrica Capacitancia eléctrica Inductancia Calibre de cable americano Niveles en dBm (dBm o dBmW), dBV (dBV), vatios y otras unidades Fuerza magnetomotriz Voltaje campo magnético Flujo magnético Inducción magnética Tasa de dosis absorbida de radiación ionizante Radioactividad. Radiación de desintegración radiactiva. Dosis de exposición Radiación. Dosis absorbida Prefijos decimales Comunicación de datos Tipografía y procesamiento de imágenes Unidades de volumen de madera Cálculos de masa molar Tabla periódica elementos quimicos D. I. Mendeleev
1 revoluciones por minuto [rpm] = 0,10471975511966 radianes por segundo [rad/s]
Valor inicial
Valor convertido
radianes por segundo radianes por día radianes por hora radianes por minuto grados por día grados por hora grados por minuto grados por segundo revoluciones por día revoluciones por hora revoluciones por minuto revoluciones por segundo revoluciones por año revoluciones por mes revoluciones por semana grados por año grados por mes grados por semana radianes por año radianes por mes radianes por semana
Artículo destacado
Más sobre la velocidad angular

información general
La velocidad angular es cantidad vectorial, que determina la velocidad de rotación del cuerpo con respecto al eje de rotación. Este vector se dirige perpendicular al plano de rotación y se determina mediante la regla de Gimlet. La velocidad angular se mide como la relación entre el ángulo que ha recorrido un cuerpo, es decir, el desplazamiento angular, y el tiempo empleado en hacerlo. En el sistema SI, la aceleración angular se mide en radianes por segundo.
Velocidad angular en los deportes.
La velocidad angular se utiliza a menudo en los deportes. Por ejemplo, los atletas reducen o aumentan velocidad angular movimientos de un palo de golf, bate o raqueta para mejorar el rendimiento. La velocidad angular está relacionada con la velocidad lineal de modo que de todos los puntos de un segmento que giran alrededor de un punto de ese segmento, es decir, alrededor del centro de rotación, el punto más alejado de ese centro se mueve a la velocidad lineal más alta. Entonces, por ejemplo, si un palo de golf está girando, el extremo de ese palo más alejado del centro de rotación se mueve a la velocidad lineal más alta. Al mismo tiempo, todos los puntos de este segmento se mueven con la misma velocidad angular. Por lo tanto, al alargar el palo, bate o raqueta, el atleta también aumenta la velocidad lineal y, en consecuencia, la velocidad de impacto transmitida a la pelota, de modo que pueda volar una distancia mayor. Acortar la raqueta o el palo, incluso agarrarlo más bajo de lo habitual, por el contrario, ralentiza la velocidad del golpe.


Las personas altas con extremidades largas tienen ventaja en términos de velocidad lineal. Es decir, al mover las piernas a la misma velocidad angular, mueven los pies a una velocidad lineal mayor. Lo mismo ocurre con sus manos. Esta ventaja puede ser una de las razones por las que sociedades primitivas Los hombres cazaban con más frecuencia que las mujeres. Es probable que los humanos más altos también se beneficiaran en el proceso evolutivo debido a esto. Las extremidades largas ayudaron no solo a correr, sino también a cazar. brazos largos Lanzaba lanzas y piedras con mayor velocidad lineal. Por otro lado, los brazos y piernas largos pueden resultar un inconveniente. Las extremidades largas tienen mas peso y se necesita energía adicional para moverlos. Además, cuando una persona corre rápido, las piernas largas se mueven más rápido, lo que significa que cuando chocan con un obstáculo, el impacto será más fuerte que para las personas con piernas cortas que se mueven a la misma velocidad lineal.
La gimnasia, el patinaje artístico y los clavados también utilizan la velocidad angular. Si un atleta conoce la velocidad angular, entonces es fácil calcular el número de saltos y otros trucos acrobáticos durante un salto. Durante los saltos mortales, los atletas suelen presionar las piernas y los brazos lo más cerca posible del cuerpo para reducir la inercia y aumentar la aceleración y, por lo tanto, la velocidad angular. Por otro lado, durante un salto o un aterrizaje, los jueces observan la suavidad con la que aterriza el atleta. A altas velocidades, es difícil regular la dirección del vuelo, por lo que los atletas reducen deliberadamente la velocidad angular extendiendo ligeramente los brazos y las piernas lejos del cuerpo.
Los atletas que lanzan disco o martillo también controlan la velocidad lineal utilizando la velocidad angular. Si simplemente lanzas un martillo sin girarlo en círculo durante mucho tiempo alambre de acero, aumentando la velocidad lineal, el lanzamiento no será tan fuerte, por lo que primero se hace girar el martillo. Los atletas olímpicos giran sobre su eje de tres a cuatro veces para aumentar su velocidad angular al máximo posible.
Velocidad angular y almacenamiento de datos en medios ópticos.

Cuando los datos se escriben en medios ópticos como discos compactos (CD), la unidad también utiliza velocidades angulares y lineales para medir la velocidad a la que se escriben y leen los datos. Hay varias formas de registrar datos, que utilizan velocidad lineal o angular variable o constante. Así, por ejemplo, el modo velocidad lineal constante(en inglés - Constant Linear Velocity o CVL) es uno de los principales métodos de grabación de discos, en el que los datos se escriben a la misma velocidad en toda la superficie del disco. Mientras graba en velocidad lineal constante zonal(en inglés - Zone Constant Linear Velocity o ZCLV) se mantiene una velocidad constante durante la grabación en una determinada parte, es decir, una zona del disco. En este caso, el disco gira más lento cuando se graba en las zonas exteriores. Modo velocidad angular parcialmente constante(Velocidad angular constante parcial o PCAV) le permite grabar con un aumento gradual de la velocidad angular hasta alcanzar un cierto umbral. Después de esto, la velocidad angular se vuelve constante. El último modo de grabación es velocidad angular constante(Velocidad Angular Constante o CAV). En este modo, se mantiene la misma velocidad angular en toda la superficie del disco durante la grabación. En este caso, la velocidad lineal aumenta a medida que el cabezal de grabación se mueve cada vez más hacia el borde del disco. Este modo también se utiliza al grabar registros y discos duros de computadoras.
Velocidad angular en el espacio
A una distancia de 35.786 kilómetros (22.236 millas) de la Tierra se encuentra la órbita en la que orbitan los satélites. Esta es una órbita especial porque los cuerpos que giran en ella en la misma dirección que la Tierra recorren toda la órbita aproximadamente en el mismo tiempo que le toma a la Tierra completar un círculo sobre su eje. Esto es poco menos de 24 horas, es decir, un día sidéreo. Dado que la velocidad angular de rotación de los cuerpos en esta órbita es igual a la velocidad angular de rotación de la Tierra, a los observadores de la Tierra les parece que estos cuerpos no se mueven. Esta órbita se llama geoestacionario.
Esta órbita generalmente la colocan satélites que monitorean los cambios en el clima (satélites meteorológicos), satélites que monitorean los cambios en los océanos y satélites de comunicaciones que brindan transmisión de radio y televisión, comunicaciones telefónicas e Internet por satélite. La órbita geoestacionaria se utiliza a menudo para los satélites porque las antenas, una vez apuntadas a un satélite, no necesitan apuntar por segunda vez. Por otro lado, su uso está asociado a inconvenientes como la necesidad de tener un campo de visión directo entre la antena y el satélite. Además, la órbita geoestacionaria está alejada de la Tierra y la transmisión de la señal requiere el uso de transmisores más potentes que los utilizados para la transmisión desde órbitas inferiores. La señal llega con un retraso de aproximadamente 0,25 segundos, lo que es perceptible para los usuarios. Por ejemplo, durante las retransmisiones de noticias, los corresponsales de zonas remotas suelen comunicarse con el estudio vía satélite; Se nota que cuando el presentador de televisión les hace una pregunta, responden con retraso. A pesar de ello, los satélites en órbita geoestacionaria se utilizan ampliamente. Por ejemplo, hasta hace poco la comunicación entre continentes se realizaba principalmente mediante satélites. Ahora ha sido reemplazado en gran medida por cables intercontinentales tendidos a través fondo del océano; sin embargo, las comunicaciones por satélite todavía se utilizan en zonas remotas. En los últimos veinte años, los satélites de comunicaciones también han proporcionado acceso a Internet, especialmente en lugares remotos donde no existe infraestructura de comunicaciones terrestres.

La vida útil de un satélite está determinada principalmente por la cantidad de combustible a bordo necesaria para las correcciones orbitales periódicas. La cantidad de combustible en los satélites es limitada, por lo que cuando se acaba, los satélites quedan fuera de servicio. La mayoría de las veces son transferidos a una órbita funeraria, es decir, a una órbita mucho más alta que la geoestacionaria. Este es un proceso costoso; sin embargo, dejar satélites innecesarios en órbita geoestacionaria corre el riesgo de colisiones con otros satélites. El espacio en la órbita geoestacionaria es limitado, por lo que los satélites antiguos que se dejan en órbita ocuparán espacio que podría ser utilizado por un satélite nuevo. Debido a esto, muchos países tienen regulaciones que requieren que los propietarios de satélites firmen un acuerdo por el cual el satélite será colocado en una órbita de eliminación al final de su vida útil.
Los artículos de Unit Converter fueron editados e ilustrados por Anatoly Zolotkov.
¿Le resulta difícil traducir unidades de medida de un idioma a otro? Los colegas están listos para ayudarlo. Publicar una pregunta en TCTerms y en unos minutos recibirás una respuesta.
Cálculos para convertir unidades en el convertidor " Velocidad angular y velocidad de rotación." se realizan utilizando las funciones de unitconversion.org.