Generelt, elektrisk motor repræsenterer elektromekanisk anordning, som omdanner elektrisk energi til mekanisk energi.
Afhængigt af typen af forbindelse er motorer enfasede og 3-fasede. Blandt 3-fasede motorer er de mest almindelige induktion (asynkrone) og synkrone elektriske motorer.
Når klokken 3 fase motor elektriske ledere er placeret i en bestemt geometrisk position (i en vis vinkel i forhold til hinanden), er der elektrisk felt. Det genererede elektromagnetiske felt roterer med en bestemt hastighed, som kaldes synkron hastighed.
Hvis en elektromagnet er til stede i dette roterende magnetfelt, bliver den magnetisk låst med det roterende felt og roterer med det felts hastighed. Faktisk er det en ureguleret motor, fordi den kun har én hastighed, som er synkron, og der kan ikke være nogen mellemhastigheder. Den fungerer med andre ord synkront med netfrekvensen. Nedenfor er formlen for synkron hastighed:
I princippet ligner dens struktur næsten en 3-faset asynkronmotor, bortset fra det faktum, at en kilde leveres til rotoren DC(det vil vi se på senere). Lad os indtil videre se på hovedstrukturen af denne type motor.
Figuren viser designet af denne type motor. Statoren leveres med 3 fasespænding, og til rotoren - en jævnstrømskilde.
Grundlæggende egenskaber ved synkronmotorer:
- Synkrone elektriske motorer er ikke selvstartende mekanismer. De kræver en vis ydre påvirkning at producere en vis synkron hastighed.
- Motoren kører synkront med frekvensen elektrisk netværk. Derfor, mens den giver uafbrudt frekvensforsyning, opfører den sig som en motor med konstant hastighed.
- Denne motor har unikke egenskaber, der fungerer ved enhver effektfaktor. Derfor bruges de til at øge styrkefaktoren.
Video: Struktur og princip for drift af en synkronmotor
Driftsprincipper for en synkronmotor
Det elektron-magnetiske felt af en synkronmotor er tilvejebragt af to elektriske indgange. Dette er en statorvikling, som består af 3 faser og giver 3 faser af strømkilden og en rotor, som forsynes med jævnstrøm.
3 faser af statorviklingen giver rotation af den magnetiske flux. Rotoren accepterer konstant strøm og producerer konstant flux. Ved en frekvens på 50 Hz roterer det 3-fasede flow med omkring 3000 omdrejninger i minuttet eller 50 omdrejninger i sekundet. På et bestemt tidspunkt kan rotoren og statorpolerne have samme polaritet (++ eller – –), hvilket forårsager frastødning af rotoren. Herefter ændres polariteten straks (+–), hvilket forårsager tiltrækning.
Men rotoren er på grund af sin inerti ikke i stand til at rotere i nogen retning på grund af tiltrækningskraften eller frastødningskraften og kan ikke forblive inaktiv. Det er ikke selvstartende.
For at overvinde kraftens inerti, en vis mekanisk påvirkning, som roterer rotoren i samme retning som magnetfeltet, hvilket giver den nødvendige synkronhastighed. Efter nogen tid lukker magnetfeltet, og synkronmotoren roterer med en bestemt hastighed.
Lanceringsmetoder
- Start af en synkronmotor ved hjælp af en hjælpemotor. En synkronmotor er mekanisk koblet til en anden motor. Det kan enten være en 3-faset induktionsmotor eller en jævnstrømsmotor. DC-strøm leveres ikke i første omgang. Motoren begynder at rotere med en hastighed tæt på synkron hastighed, hvorefter der tilføres jævnstrøm. Når magnetfeltet er lukket, afsluttes kommunikationen med hjælpemotoren.
- Asynkron start. En ekstra kortsluttet vikling er installeret i rotorpolernes polstykker. Når spændingen er tændt i statorviklingen, fremkommer et roterende magnetfelt. Ved at krydse den kortsluttede vikling, som er indlejret i rotorens polstykker, inducerer dette roterende magnetfelt strømme i det, som i vekselvirkning med statorens roterende felt får rotoren til at rotere. Når synkron hastighed er nået, reduceres emk og drejningsmoment. Til sidst, når magnetfeltet lukker, reduceres momentet også til nul. Således startes synkroniseringen først af en induktionsmotor ved hjælp af en ekstra vikling.
Anvendelse
- Synkronmotor bruges til at forbedre effektfaktoren. Synkronmotorer er meget udbredt i strømsystemet, fordi de fungerer ved enhver effektfaktor og har økonomisk ydeevne.
- Synkronmotorer finder deres anvendelse, hvor driftshastigheden ikke overstiger 500 rpm og øget effekt er påkrævet. For effektkrav fra 35 kW til 2500 kW vil omkostningerne, størrelsen, vægten og den tilsvarende induktionsmotor være ret høj. Sådanne motorer bruges ofte til at betjene stempelpumper, kompressorer, rullemaskiner og andet udstyr.
Synkron motor. Driftsprincip og enhed. En synkronmotor kan fungere som en generator og en motor. En synkronmotor er designet på samme måde som en synkrongenerator. Dens armaturvikling I (fig. 291, a) er forbundet med en trefaset kilde AC; magnetiseringsvikling 2 forsynes med jævnstrøm fra en ekstern kilde. På grund af samspillet mellem det roterende magnetiske felt 4 skabt af den trefasede ankervikling og feltet skabt af feltviklingen, elektromagnetisk drejningsmoment M (fig. 291,b), hvilket får rotor 3 til at rotere. Men i en synkronmotor, i modsætning til en asynkronmotor, vil rotoren accelerere til den rotationshastighed n = n 1, hvormed magnetfeltet roterer (op til synkronhastigheden). Forklaring
Dette skyldes det faktum, at strømmen i rotorviklingen leveres fra en ekstern kilde og ikke induceres i den af statorens magnetfelt og derfor ikke afhænger af motorakslens hastighed. Karakteristisk træk af en synkronmotor er den konstante hastighed af dens rotor, uanset belastningen.
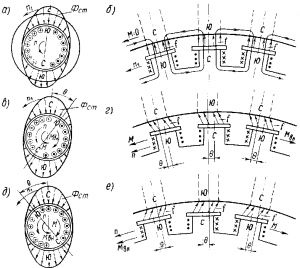
Elektromagnetisk drejningsmoment. Det elektromagnetiske drejningsmoment i en synkronmotor opstår som et resultat af vekselvirkningen mellem rotorens magnetiske flux (excitationsflux Ф в) med det roterende magnetfelt, der skabes af den trefasede strøm, der strømmer gennem ankerviklingen (armaturflux Ф в). På tomgang maskine falder akserne for statorens og rotorens magnetfelter sammen (fig. 292,a). Derfor er de elektromagnetiske kræfter I, der opstår mellem statorens "poler" og rotorpolerne, rettet radialt (fig. 292, b), og maskinens elektromagnetiske drejningsmoment er nul. Når maskinen kører i motortilstand (fig. 292, c og d), forskydes dens rotor, under påvirkning af et eksternt belastningsmoment M påført akslen, med en vis vinkel 0 mod rotationsretningen. I dette tilfælde, som et resultat af elektromagnetisk vekselvirkning mellem rotoren og statoren, skabes elektromagnetiske kræfter I, rettet i rotationsretningen, det vil sige, at der dannes et roterende elektromagnetisk moment M, som har en tendens til at overvinde virkningen af det ydre moment M ext. Maksimalt drejningsmoment M max
passer til vinklen? = 90°, når rotorpolernes akser er placeret mellem statorens "polers" akser.
Hvis belastningsmomentet M inn påført den elektriske motoraksel bliver større end M max, stopper motoren under påvirkning af det eksterne drejningsmoment M in; i dette tilfælde vil en meget stor strøm strømme gennem ankerviklingen af en stationær motor. Denne tilstand kaldes tab af synkronisme, det er en nødsituation og bør ikke tillades.
Når maskinen kører i generatortilstand (fig. 292, e og f), skifter rotoren, under påvirkning af et eksternt drejningsmoment M ext påført akslen, en vinkel? i omdrejningsretningen. I dette tilfælde skabes der elektromagnetiske kræfter rettet mod rotationen, dvs. at der dannes et bremsende elektromagnetisk drejningsmoment M. Når værdien og retningen af det ydre drejningsmoment på rotorakslen M ext ændres, ændres kun vinklen. mellem stator- og rotorfelternes akser, mens rotorhastigheden i en asynkron maskine i dette tilfælde ændres.
Opstart og hastighedskontrol.En synkronmotor har ingen initial startmoment . Hvis du forbinder ankerviklingen til et vekselstrømsnetværk, når rotoren er stationær, og jævnstrøm passerer gennem magnetiseringsviklingen, så vil det elektromagnetiske drejningsmoment under en periode med strømændring ændre retning to gange, dvs. det gennemsnitlige drejningsmoment over perioden vil være lig med nul. For at starte en synkronmotor er det derfor nødvendigt at accelerere dens rotor ved hjælp af et eksternt drejningsmoment til en rotationshastighed tæt på synkron. Til dette formål bruger de metode asynkron start . En synkronmotor startes op som en asynkronmotor, hvortil den er udstyret med en speciel kortsluttet startvikling 3 (fig. 293). Kobber- eller messingstænger, kortsluttet af to enderinge, er anbragt i polstykkerne på rotoren 2 på synkronmotoren. Startviklingen er designet som et egernbur af en asynkron maskine, men optager kun en del af rotoromkredsen. Nogle motorer har en speciel kortsluttet vikling
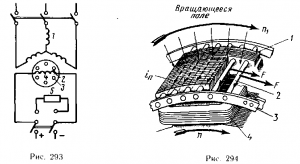 Ris. 293. Ordning for asynkron start af en synkronmotor;
Ris. 293. Ordning for asynkron start af en synkronmotor;
Ris. 294 Enhed til startvikling af en synkronmotor: 1 - rotor; 2 - stænger; 3 - ring; 4 - feltvikling
Elektriske motorer findes i to hovedtyper - synkrone og asynkrone. Hvad er dem begge?
Hvad er en synkronmotor?
TIL synkron Det er sædvanligt at henvise til elektriske motorer, der arbejder på vekselstrøm og har en rotor med en rotationshastighed, der matcher magnetfeltets hastighed i enhedens design.
Nøgleelementer i en synkron elektrisk motor:
- anker;
- induktor.
Det første element i enheden er placeret på statoren. Induktoren er placeret på rotoren, som er adskilt fra statoren med en luftspalte. Armaturstrukturen er repræsenteret af en vikling (en eller flere). Strømmene, der tilføres det tilsvarende motorelement, danner et magnetfelt, der roterer med en given frekvens og interagerer med induktorens felt. Induktoren indeholder 2 poler - i form af permanente magneter.
Den synkrone enhed kan fungere i to tilstande:
- som selve elmotoren;
- som en generator.
Den første driftstilstand involverer vekselvirkningen mellem det magnetiske felt, der dannes ved ankeret, og det felt, der dannes ved induktorens poler. En synkronmotor i generatortilstand fungerer pga elektromagnetisk induktion: under rotorens rotation interagerer det magnetiske felt, der dannes på viklingen, igen med faserne af viklingen på statoren, hvilket resulterer i dannelsen af en elektromotorisk kraft.
Hvad er en asynkron elektrisk motor?
TIL asynkron Det er sædvanligt at henvise til elektriske motorer, hvor rotationshastigheden af en af nøgleelementer- rotor - falder ikke sammen med rotationsfrekvensen af magnetfeltet dannet af strømmen, der opstår på statorviklingen. Asynkrone enheder kaldes undertiden induktionsenheder. Dette skyldes det faktum, at der induceres strøm i rotorviklingen, når den udsættes for statormagnetfeltet.
I design asynkron elektrisk motor Der er en stator og en rotor, som er adskilt af en luftspalte. Enhedens vigtigste aktive elementer:
- vikling;
- magnetisk kredsløb
Yderligere komponenter spiller en vigtig rolle i driften af en asynkronmotor. strukturelle elementer, som sikrer styrke, køling og stabilitet af enheden.
Sammenligning
Hovedforskellen mellem en synkronmotor og en asynkronmotor er forholdet mellem rotorhastigheden og magnetfeltet. I den første type enhed er begge indikatorer de samme. I en asynkron maskine - anderledes.
Det kan bemærkes, at elektriske motorer af den anden type generelt er mere almindelige end den første. Samtidig præsenteres asynkrone enheder oftest i en række, hvor en egern-burrotor er installeret. Disse enheder har et nummer de vigtigste fordele før elektriske motorer af andre kategorier. Nemlig:
- enkelhed af design, pålidelighed;
- relativt lave omkostninger ved produktion og drift;
- mulighed for at bruge eksisterende netværksressourcer uden at forbinde konvertere.
Samtidig er asynkrone maskiner med egern bur rotor De har også en række ulemper. Nemlig:
- tilstedeværelse af lavt startmoment;
- tilstedeværelsen af en stor startstrøm;
- reduceret effektfaktor;
- lav kontrollerbarhed med hensyn til hastighedsregulering;
- afhængighed maksimal hastighed på frekvensen af det elektriske netværk;
- Det elektromagnetiske drejningsmoment i asynkronmotorer af denne type er kendetegnet ved stærk følsomhed over for et fald i spændingen i netværket.
Til gengæld har synkrone enheder også ubestridelige fordele. Disse omfatter:
- relativt lav følsomhed over for spændingsændringer i netværket;
- rotationsstabilitet uanset belastningen på rotoren.
Synkronmotorer har også ulemper:
- relativ kompleksitet af designet;
- svært ved at starte rotoren.
De bemærkede funktioner ved driften af synkrone og asynkrone enheder gør det optimalt at bruge førstnævnte, hvis den nødvendige motoreffekt i systemet (for eksempel som en del af en fabrikslinjeinfrastruktur) skal være omkring 100 kW eller mere. I andre tilfælde bliver brugen af asynkrone maskiner som regel mere at foretrække.
Efter at have overvejet forskellen mellem en synkron og asynkron motor, vil vi vise konklusionerne i tabellen.
En synkronmotor er en trefaset maskine, hvis rotor forsynes med jævnstrøm. Rotorens rotationsfrekvens er lig med rotationsfrekvensen af statormagnetfeltet. Denne afhængighed bestemmes af frekvensen af strømmen i netværket og antallet af polpar
Ris. Synkronmotorstartdiagram.
1 - excitationsvikling; 2 - omskifter; 3 – startmodstand; 4 - kortsluttet rotorvikling; 5 - statorvikling; 6 - kontakt; 7 - exciter anker; 9 exciter vikling
Statoren på en synkronmotor adskiller sig ikke fra statoren på en asynkronmotor. Rotoren er lavet med udtalte poler til lavhastighedsmotorer og implicitte poler til højhastighedsmotorer.
Driftsprincippet for en synkronmotor er baseret på den elektromagnetiske vekselvirkning mellem polerne af statorens roterende magnetfelt og rotorpolerne, dannet som et resultat af forsyningen af jævnstrøm til rotorviklingen. Men når motoren er tændt, vibrerer rotoren, men roterer ikke, da vekselstrømmen ændrer retning med en frekvens på 50 Hz, hvilket skaber kontinuerlige stød i begge retninger.
For at sikre starten af en synkronmotor er dens rotor, ud over excitationsviklingen, udstyret med en ekstra startvikling (kortsluttet eller fase). En sådan vikling giver asynkron som sædvanligt ved fuld eller reduceret spænding. Når motorrotoren når en rotationshastighed tæt på synkron, tilføres jævnstrøm til magnetiseringsviklingen, og motoren begynder at fungere i synkron tilstand.
Når rotoren i motoren når en rotationshastighed tæt på synkron, tilføres en jævnstrøm til magnetiseringsviklingen, hvorefter motoren begynder at køre i synkron tilstand.
Samtidig yderligere begynder vikling har ingen effekt, da det roterer synkront med magnetfeltet ikke skærer med magnetiske linjer, og der induceres ingen strømme i det, og der skabes intet drejningsmoment. Excitationsviklingen drives fra specielle DC-generatorer eller fra halvlederensrettere.
Efter start af en synkronmotor, hvis belastningen på akslen er nul, falder spændingsvektoren sammen med vektoren af den inducerede emf. Hvis et drejningsmoment påføres motorakslen, vil en forskydningsvinkel θ fremkomme mellem de angivne vektorer, og motoren begynder at udvikle drejningsmoment, hvis størrelse vil være en funktion af vinklen θ
![]()
Hvor er statorspændingen; E – EMF induceret i statorviklingen af rotorens magnetfelt; ω – vinkelhastighed stator magnetfelt; x 1 – induktiv reaktans af statorviklingen.
Denne ligning er vinkelkarakteristik synkron motor. Motorens drejningsmoment stiger, når vinklen θ ændres fra 0 til 90°, og falder derefter. Momentet når sin maksimale værdi ved θ=90°. Ved en større vinkel bliver motordriften ustabil, og en stigning i belastningen fører til en krænkelse af synkronisme og stop. Det nominelle drejningsmoment svarer til vinklen θ=25÷30° (sinθ=0,43÷0,50) I dette tilfælde er overbelastningskapaciteten
λ ![]()
Med stigende excitationsstrøm, dvs. tilføres rotorviklingen, øges motorens overbelastningskapacitet, og med et fald falder den. Men som det kan ses af ligningen, er motorens drejningsmoment proportional med den første spændingseffekt, hvilket gør den mindre følsom over for spændingsudsving i netværket sammenlignet med en asynkronmotor. Rotorhastigheden for en synkronmotor afhænger ikke af belastningen og forbliver konstant i alle tilstande. Derfor er de mekaniske egenskaber ved sådanne motorer absolut stive. Synkronmotorer bruges til at drive maskiner med konstant rotationshastighed.

Ris. Mekaniske egenskaber for en synkronmotor
De vigtigste fordele ved en synkronmotor:
Omdrejningshastigheden afhænger ikke af belastningen;
Evne til at arbejde med avancerede cosφ
Mindre afhængighed af drejningsmoment af netspænding end for asynkronmotorer
Ulemper ved en synkronmotor:
Behovet for at have to typer strøm;
Opstartsbesvær;
Mulighed for synkroniseringsfejl på grund af overbelastning;
Svært ved at regulere rotationshastigheden.
I øjeblikket bruges synkronmotoren i installationer, der ikke kræver hastighedskontrol og hyppig start. Disse omfatter store ventilator-, pumpe- og kompressorenheder.
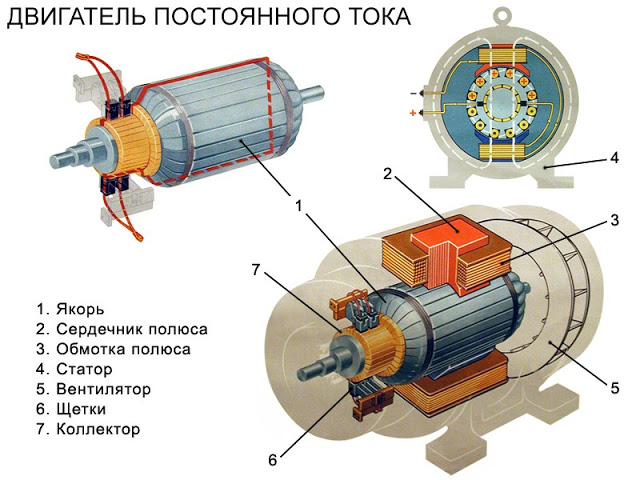
Driften af enhver elektrisk motor er baseret på princippet om elektromagnetisk induktion. En elektrisk motor består af en stationær del - en stator (til asynkrone og synkrone vekselstrømsmotorer) eller en induktor (til jævnstrømsmotorer) og en bevægelig del - en rotor (til asynkrone og synkrone vekselstrømsmotorer) eller et anker (til jævnstrømsmotorer) . Permanente magneter bruges ofte som en induktor på DC-motorer med lav effekt.
Alle motorer kan groft sagt opdeles i to typer:
DC motorer
AC-motorer (asynkrone og synkrone)
DC motorer
Ifølge nogle udtalelser kan denne motor også kaldes en synkron DC-maskine med selvsynkronisering. En simpel motor, som er en DC-maskine, består af permanent magnet på induktoren (statoren), 1 elektromagnet med tydelige poler på armaturet (to-benet armatur med tydelige poler og en vikling), børste-samler enhed med 2 plader (lameller) og 2 børster.En simpel motor har 2 rotorpositioner (2 "dødpunkter"), hvorfra selvstart er umuligt, og ujævnt drejningsmoment. Til en første tilnærmelse er statorpolernes magnetfelt ensartet (ensartet).
Disse motorer med en børste-kommutatorenhed er:
Samler - elektrisk apparat, hvor rotorpositionssensoren og strømafbryderen i viklingerne er den samme enhed - en børste-samler-samling.

Børsteløs- et lukket elektromekanisk system bestående af en synkron enhed med en sinusformet fordeling af magnetfeltet i mellemrummet, en rotorpositionssensor, en koordinatomformer og en effektforstærker. En dyrere mulighed sammenlignet med børstede motorer.

AC motorer
Baseret på driftstypen er disse motorer opdelt i synkrone og asynkrone motorer. Den grundlæggende forskel er, at i synkrone maskiner bevæger den 1. harmoniske af statorens magnetomotoriske kraft sig med rotorens rotationshastighed (det er grunden til, at rotoren selv roterer med rotationshastigheden af magnetfeltet i statoren), mens den er i asynkron. maskiner er og forbliver der en forskel mellem rotorens rotationshastighed og magnetfeltets rotationshastighed i statoren (feltet roterer hurtigere end rotoren).Synkron- en vekselstrømsmotor, hvis rotor roterer synkront med forsyningsspændingens magnetfelt. Disse motorer bruges traditionelt med enorm effekt (hundredevis af kilowatt og derover).
Der er synkronmotorer med diskret vinkelbevægelse af rotoren - stepmotorer. I dem er denne position af rotoren fastgjort ved at levere strøm til de tilsvarende viklinger. Overgangen til en anden position opnås ved at fjerne forsyningsspændingen fra nogle viklinger og overføre den til andre viklinger af motoren.
En anden type synkronmotor er en skiftet reluktansmotor, hvis strømforsyning af viklingerne er dannet ved hjælp af halvlederelementer.

Asynkron- en vekselstrømsmotor, hvor rotorhastigheden adskiller sig fra frekvensen af det torsionsmagnetiske felt skabt af forsyningsspændingen, det andet navn for asynkrone maskiner er induktion på grund af det faktum, at strømmen i rotorviklingen induceres af det roterende felt; af statoren. Asynkrone maskiner udgør nu en stor del elektriske maskiner. De bruges hovedsageligt i form af elektriske motorer og betragtes som nøglekonvertere elektrisk energi i mekaniske og for det meste asynkrone motorer med en egern-burrotor bruges
I henhold til antallet af faser er motorer:
- enkeltfaset
- to-faset
- tre-faset
De mest populære og mest efterspurgte motorer, der bruges i produktion og husholdninger:
Enfaset egern-bur asynkron motor
En enfaset asynkronmotor har kun 1 arbejdsvikling på statoren, hvortil der tilføres vekselstrøm under motordrift. Selvom for at starte motoren, er der også en hjælpevikling på dens stator, som kortvarigt er forbundet til netværket gennem en kondensator eller induktans eller kortsluttes af kontaktens startkontakter. Dette er nødvendigt for at skabe et indledende faseskift, så rotoren begynder at rotere, ellers ville statorens pulserende magnetfelt ikke flytte rotoren fra sin plads.
Rotoren af en sådan motor, som enhver anden asynkron motor med en egern-burrotor er det en cylindrisk kerne med riller fyldt med aluminium, med umiddelbart støbte ventilationsblade.
En sådan rotor kaldes en egern-burrotor. Enfasede motorer bruges i laveffektenheder, herunder rumventilatorer eller små pumper.

To-faset egern-bur asynkron motor
Tofasede asynkronmotorer er mere effektive, når de opererer fra et enfaset AC-netværk. De indeholder to arbejdsviklinger på statoren, placeret vinkelret, mens den ene af viklingerne er forbundet til AC-netværket direkte, og den anden gennem en faseskiftende kondensator, så der kommer et roterende magnetfelt ud, men uden kondensatoren ville rotoren ikke bevæge sig.
Disse motorer har blandt andet en egern-burrotor, og deres anvendelse er endnu bredere end enfasede motorer. Det er der allerede vaskemaskiner og diverse maskiner. Tofasede motorer til strømforsyning fra enkeltfasede netværk kaldes kondensatormotorer, fordi en faseskiftende kondensator ofte betragtes som en væsentlig del af dem.

Trefaset egern-bur asynkron motor
Tre-faset asynkron motor har tre arbejdsviklinger på statoren, forskudt i forhold til hinanden, så de, når de er tilsluttet et trefaset netværk, magnetiske felter vise sig at være forskudt i rummet med 120 grader i forhold til hinanden. Når du tænder for trefasemotoren til trefaset netværk vekselstrøm fremkommer et roterende magnetfelt, som får egern-burrotoren til at bevæge sig.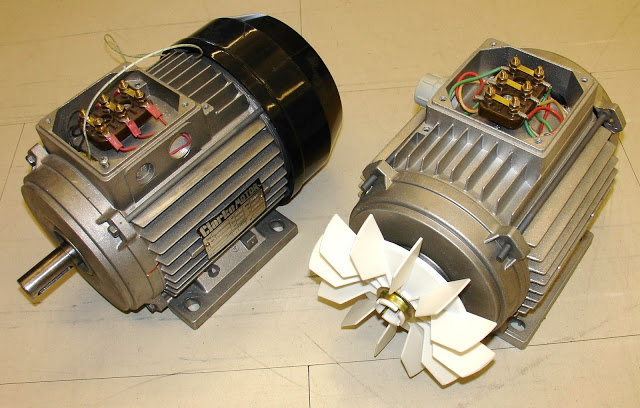
Statorviklingerne i en trefaset motor kan forbindes i henhold til et "stjerne" eller "trekant" kredsløb, mens for at drive motoren i henhold til et "stjerne" kredsløb, kræves en højere spænding end for et "trekant" kredsløb. på motoren er der derfor angivet 2 spændinger, f.eks.: 127/220 eller 220/380. Trefasede motorer er uundværlige til at drive forskellige maskiner, spil, rundsave, kraner mv.
Trefaset asynkronmotor med viklet rotor
En trefaset asynkronmotor med en viklet rotor har en stator, der ligner de ovenfor beskrevne motortyper, et lamineret magnetisk kredsløb med 3 viklinger lagt i dets slidser, men duraluminstængerne hældes ikke i faserotoren, men rigtige er allerede lagt trefaset vikling, i en stjerneforbindelse. Enderne af den viklede rotorviklingsstjerne er ført ud på tre kontaktringe monteret på rotorakslen og elektrisk adskilt fra denne.
Ved hjælp af børster tilføres blandt andet trefaset strøm til ringene. vekselspænding, og tænding kan ske enten direkte eller gennem reostater. Selvfølgelig er motorer med en viklet rotor dyrere, selvom deres startmoment under belastning er meget højere end for motorer med en egern-burrotor. Det er netop som følge af den øgede kraft og enorme startmoment, at denne type motorer bruges i drev af elevatorer og kraner, med andre ord, hvor enheden starter under belastning og ikke i tomgang, som med motorer med en egern-burrotor.