En lineær stabilisator er en spændingsdeler, hvis indgang forsynes med en input (ustabil) spænding, og udgangsspændingen (stabiliseret) fjernes fra den nederste arm af divideren. Stabilisering udført af ændringer i modstanden af en af armene divider: modstanden opretholdes konstant, så spændingen ved udgangen af stabilisatoren er inden for de fastsatte grænser. Med et stort forhold mellem input/output-spændinger har den lineære stabilisator lav virkningsgrad, da det meste af effekten Pdis = (Uin - Uout) * Den afgives som varme på kontrolelementet. Derfor skal kontrolelementet være i stand til at sprede tilstrækkelig strøm, det vil sige, at det skal installeres på en radiator i det krævede område. Fordelen ved en lineær stabilisator er dens enkelhed, mangel på interferens og et lille antal brugte dele.
Afhængig af placering af et element med variabel modstand lineære stabilisatorer er opdelt i to typer:
− konsekvent: kontrolelementet er forbundet i serie med belastningen.
− parallel: reguleringselementet er forbundet parallelt med belastningen.
Afhængig af stabiliseringsmetode:
− parametrisk: i en sådan stabilisator bruges en sektion af enhedens strømspændingskarakteristik (volt-ampere-karakteristik), som har en stor stejlhed.
− kompenserende: har feedback. I den sammenlignes spændingen ved udgangen af stabilisatoren med referencen, og et styresignal for kontrolelementet dannes fra forskellen mellem dem. De er ret alsidige og kan fremstilles i form af integrerede kredsløb til spændingsstabilisatorer.
Lineære spændingsstabilisator-chips (LCH) omfatter, udover effektregulatorer, et mere eller mindre komplekst laveffekt-kontrolkredsløb. Grundlæggende vanskelighed skabelsen af integrerede stabilisatorer er, at magt transistorer sprede betydelig magt, ringer lokal opvarmning af krystallen med en betydelig temperaturgradient. Dette forringer dramatisk stabiliteten af styrekredsløbsparametrene, som inkluderer en referencespændingskilde, en differentialfejlforstærker, overstrømsbeskyttelseskredsløb og kortslutning belastning, fra overophedning af krystallen og andre nødtilstande eller unormale tilstande.
Monolitisk lineær integreret stabilisator spænding blev først udviklet af R. Widlar i 1967. Dette mikrokredsløb (pA723) indeholder en styretransistor forbundet i serie mellem den ustabiliserede spændingskilde og belastningen, en fejlforstærker og en temperaturkompenseret referencespændingskilde. Ordningen viste sig at være så vellykket, at dens produktion i begyndelsen af 70'erne nåede op på 2 millioner enheder om måneden! Efter massetal anvendelse af LCH stå på andenpladsen efter operationsforstærkere.
Et forenklet diagram af en lineær spændingsstabilisator er vist i fig. 1.
Ris. 1. Grundkredsløb af en lineær spændingsregulator
Kredsløbet består af en operationsforstærker i en ikke-inverterende forbindelse med negativ spændingsfeedback, en referencespændingskilde V REF og regulerende transistor VT 1 forbundet i serie med belastningen.
Udgangsspænding V UD styret af negativt kredsløb feedback, lavet på en resistiv skillevæg R1R2.
Op-ampen spiller rollen som en fejlforstærker, som her er forskellen mellem referencespændingen V REF specificeret af referencespændingskilden (VR) og udgangsspændingen for deleren R1R2
Ordningen fungerer som følger. Lad af en eller anden grund (for eksempel på grund af et fald i belastningsmodstand eller ureguleret indgangsspænding) stabilisatorens udgangsspænding V UD faldet. I dette tilfælde vil der vises en fejl ved op-amp-indgangen V > 0. Forstærkerens udgangsspænding vil stige, hvilket vil føre til en stigning i basisstrømmen, og følgelig emitterstrømmen af styretransistoren til en værdi, hvor udgangsspændingen vil stige næsten til det oprindelige niveau.
I tilfælde af en ideel op-amp er steady-state fejlværdien, som falder sammen med op-ampens differentielle indgangsspænding, tæt på nul. Det følger heraf
Operationsforstærkeren får strøm fra en ureguleret unipolær indgangsspænding, i dette tilfælde positiv (med en regulerende transistor p-n-p -type alle spændinger i kredsløbet skal være negative). Dette pålægger begrænsninger på det tilladte område af indgangs- og udgangssignaler, som under disse forhold kun bør være positive
For strømforsyningskredsløb betyder en sådan begrænsning ikke noget, så du kan nægte at bruge en spænding med en anden polaritet til at drive op-ampen. En ting mere fordel ved en sådan ordning er det spænding strømforsyning af operationsforstærkeren kan være dobbelt , uden frygt for at overskride de maksimalt tilladte parametre. Standard op-amps kan således bruges i regulatorkredsløb med indgangsspændinger op til 30 V. Selvom op-ampen er drevet af en ureguleret indgangsspænding V IN På grund af dyb negativ feedback er denne faktors indflydelse på udgangsspændingens stabilitet lille.
For at drive elektronisk udstyr er spændingsrippel, der ikke overstiger en brøkdel af en procent, tilladt, men ved udgangen af ensrettere er krusningen meget større. For at reducere dem anvendes udjævningsfiltre, som skal reducere (undertrykke) de variable komponenter så meget som muligt og passere den direkte komponent af den ensrettede spænding med så lidt tab som muligt.
Ris. 2.30.
EN – RC-filter; b – en graf, der forklarer filterets funktion: V - LC filter; G – U-formet RC-filter
Det enkleste filter er en kondensator tilsluttet ved udgangen af ensretteren I parallelt med belastningen (fig. 2.30, EN), som lagrer energi ved at lade, når ensretterspændingen stiger, og frigiver den ved at aflade til belastningsmodstanden, når den falder. I fig. 2.30, b viser spændingsbølgeformen over kondensatoren U c (og derfor på en parallelforbundet R n ) med en fuldbølge ensretter.
For yderligere at reducere krusning anvendes L-formede LC-filtre (fig. 2.30, V). Induktiv reaktans har en tendens til at blive gjort meget større R n således at de vekslende komponenter i den ensrettede spænding med rippelfrekvenser fra den primære og højere ville blive "forsinket" af filteret i form af et spændingsfald over X L uden at nå lasten. Kapacitansen er betydeligt mindre end R H, således at den ensrettede strøms vekselkomponenter lukkes igennem X med, omgåelse R,. I dette tilfælde skaber den konstante strømkomponent, for hvilken , ikke et spændingsfald på tværs L f og lukker ikke gennem Sf, går helt ind i lasten.
Ulempen ved LC-filtre er omfanget og vanskeligheden ved at fremstille mikroelektroniske induktorer. Derfor i integrerede kredsløb ved belastningsstrømme på flere milliampere anvendes U-formede RC-filtre (fig. 2.30, G), på trods af deres lidt dårligere udjævningsegenskaber og lavere effektivitet.
Lineære spændingsstabilisatorer
Spændingsstabilisator er en enhed, der automatisk opretholder spændingen på belastningen, når sådanne destabiliserende faktorer som den primære kildes spænding, belastningsmodstand og omgivende temperatur ændrer sig inden for visse grænser.
Der er to typer stabilisatorer - parametrisk og kompensation.
Parametrisk stabilisator bruger elementer, hvor spændingen forbliver uændret, når strømmen, der løber gennem dem, ændres. Sådanne elementer er zenerdioder, hvori, når strømmen ændres inden for et meget bredt område, ændres spændingsfaldet med brøkdele af en procent (se afsnit 1.2). Parametriske stabilisatorer bruges som regel som kilder til reference (reference) spænding i kraftige kompensationsstabilisatorer (fig. 2.31).
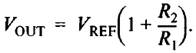
Ris. 2,31. Strukturen af en kompensationsspændingsstabilisator (a), dens enkleste implementering(b) og en graf, der forklarer valget af driftspunkt(V)
Driftsprincip kompensationsstabilisator er baseret på at sammenligne den faktiske belastningsspænding med referencespændingen og øge eller mindske udgangsspændingsafvigelsen afhængigt af denne afvigelse. Referencespændingen er dannet af en referencespændingskilde (VS). I sammenligningselementet (CE) sammenlignes belastningsspændingen med referencespændingen, og der genereres et mistilpasningsstyresignal. Dette signal forstærkes af en forstærker (U) og føres til et reguleringselement (RE), som giver en sådan ændring i udgangsspændingen, der bringer den aktuelle belastningsspænding tættere på referenceværdien.
Hovedparameteren for stabilisatoren er stabiliseringskoefficient – forholdet mellem den relative ændring i spænding ved indgangen og den relative ændring i spænding ved udgangen:
I den enkleste kompensationsstabilisator er referencespændingen spændingen U st zener diode VD, og sammenligningselementet, forstærkeren og det samtidig regulerende element er en transistor (se fig. 2.31, b).
Udgangsspænding (som det kan ses af "+" og "-" tegnene på diagrammet) Uout = U st – UEB. Strømmen gennem modstanden RB dannes ved at tilføje to strømme: zenerdiodestrømmen jeg st og nuværende base jeg B. Transistorens driftstilstand vælges således, at det indledende driftspunkt r var placeret i midten af den lineære del af den input egenskaber(se fig. 2.31, V). Spænding U I dette tilfælde er EB 0,-0,3 V. Da zenerdiodespændingen normalt er omkring 8 V, så U ud ≈ U CT.
Lad os antage, at belastningsspændingen af en eller anden grund er faldet. Dette vil føre til en stigning i spændingsfaldet UEB =U st – U ud, hvilket igen vil øge graden af åbning af transistoren. Som et resultat falder spændingsfaldet over transistoren U KE vil falde, hvilket betyder, at belastningsspændingen vil stige U ud = U BX – U ΚE, og til sidst vil spændingen ved belastningen blive genoprettet. En lignende genopretning af udgangsspændingen vil forekomme, når den stiger. Kun i dette tilfælde vil der være et fald i graden af åbning af transistoren og en tilsvarende stigning i spændingen faldet over den U ke.
Transistoren er forbundet i henhold til emitterfølgerkredsløbet, hvis indgangsspænding er U CT. Fordi jeg B << I n, kredsløbet giver dig mulighed for at levere betydelig strøm til belastningen. Stabiliseringskoefficienten for en sådan ordning er TIL st = 150-300. I det betragtede kredsløb genereres mistilpasningssignalet på selve styretransistoren. En høj grad af stabilisering tilvejebringes af kredsløb, hvor et forforstærket mistilpasningssignal tilføres til bunden af styretransistoren.
I de betragtede spændingsstabilisatorer er reguleringstransistoren altid åben, og selvregulering udføres ved at ændre graden af dens åbning, dvs. lineær. Derfor kaldes sådanne stabilisatorer lineær.
Skiftende spændingsstabilisatorer
I modsætning til de tidligere diskuterede lineære stabilisatorer, i pulsspændingsstabilisatorer transistoren, gennem hvilken strømmen løber til belastningen, åbner og lukker periodisk, dvs. fungerer i nøgletilstand. Desuden udføres reguleringen ved at ændre pausen, hvor belastningsstrømmen løber gennem nøgletransistoren fra en konstant indgangsspændingskilde. Transistoren fungerer således ikke i en lineær tilstand, men i en pulseret tilstand: den er enten helt åben eller helt lukket. I sådanne stabilisatorer er den gennemsnitlige spænding over belastningen Uout = U BX t / T, hvor T - puls gentagelsesperiode; t – varigheden af nøglens lukkede tilstand.
Skiftende stabilisatorer giver højere effektivitet, da der i en helt åben tilstand falder meget få spændingsfald over transistoren, og derfor er den effekt, der afgives af transistoren, meget mindre end den effekt, der afgives i lineære stabilisatorer.
Da reguleringen udføres ved at ændre pulsbredden t, Dette driftsprincip kaldes pulsbreddemodulation (PWM). Pulsstabilisatorer (fig. 2.32) er ligesom lineære kompensatorer. Fejlsignal U p, dannet af SE-ens sammenligningselement og forstærket af forstærkeren (A), omdannes til impulser, der følger med samme frekvens, hvis varighed t på ændringer under indflydelse af fejlsignalet. Disse impulser åbner og lukker nøgletransistoren V.T. som sammen med dioden VD og et LC-filter danner et pulsregulerende element.
![]()
Ris. 2,32. Skiftende spændingsstabilisator (-en ) og de processer, der finder sted i den(b)
Mens savtandspændingen U n < U p (afsnit t0 – t1 i fig. 2.32, b), transistoren er låst. Over tid t 1 – t 3 hvornår U n >U p, transistoren er åben, og spændingen t/BX tilføres induktoren. Drevet af UBX diode VD er låst, og strømmen gennem induktoren jeg dr stiger og lagrer energi i induktans. Indtil induktorstrømmen når værdien DC belastninger jeg n (afsnit t 1 – t 2), kondensator MED aflades til belastningen og spændingen på den U c falder. Fra tidspunktet ί2> hvornår jeg osv > jeg n kondensatoren begynder at genoplades med den aktuelle forskel jeg dr – jeg n. I det øjeblik t3, hvor transistoren slukkes, åbner induktorens selvinduktive emf dioden, og induktorstrømmen, der lukker gennem dioden, løber gennem belastningen indtil t 4 fortsætter med at oplade kondensatoren, hvilket giver den den energi, der er lagret af induktoren. I t4 – t5 sektionen er induktorstrømmen mindre end belastningsstrømmen, og belastningen fødes af kondensatorens afladningsstrøm. Siden t 5 gentages processen.
Lad udgangsspændingen blive mindre end den indstillede værdi og mismatchspændingen U p vil falde med -ΔUρ. Så det tidspunkt i tiden, hvor savtandsspændingen genereret af GPN bliver lig med spændingen U p vil komme tidligere, og transistortonets åbne tilstand, genereret af PWM, vil stige. Dette vil føre til en stigning i udgangsspændingen for UBbIX og gendannelse af den hundrede indstillede værdi. Hvis udgangsspændingen stiger, vil fejlspændingen også stige med +Δ U s. Dette vil føre til, at tidspunktet for åbning af transistoren, genereret af PWM, kommer senere, og tidspunktet for transistorens åbne tilstand vil falde. Som et resultat vil udgangsspændingen falde, og dens indstillede værdi vil blive gendannet.
Spændingsstabilisering i moderne elektroniske enheder Meget vigtigt element. Digitale kredsløb kræver stabil og pålidelig strøm.
De fleste simpelt kredsløb spændingsstabilisering, som vi i praksis kan finde, er et system baseret på en zenerdiode. Den grundlæggende driftstilstand for en zenerdiode er vist i følgende figur:
Dette system bruger zenerdiodeeffekten, der opstår under nedbrud p-n kryds ved omvendt bias. Dette får strøm til at flyde, og enhver overskydende spænding absorberes over ballastmodstanden. Mængden af spændingsfald bestemmes af mængden af strøm, der løber gennem den.
Derfor fikserer en fast strøm gennem zenerdioden spændingsfaldet over modstanden og stabiliserer derved udgangsspændingen. Zenerdioder fremstilles til forskellige spændinger i området fra 1,5V til 200V.
Men ofte i praksis bruges specialiserede mikrokredsløb til at stabilisere spændingen, som kan opdeles i to grupper:
- med spændingsjustering
- positiv polaritet
- negativ polaritet - uden spændingsjustering
- positiv polaritet
- negativ polaritet
Integrerede spændingsstabilisatorer har tre hovedkarakteristika:
- udgangsspænding
- maksimal strøm
- minimum indgangsspænding
Ved indgangen til spændingsstabilisatoren er det nødvendigt at anvende en højere spænding, end hvad der skal være ved udgangen.
I de mest almindelige stabilisatorer er forskellen mellem indgangs- og udgangsspændingen omkring 2V. Men der er også LDO-stabilisatorer, hvor denne forskel er meget lavere. Denne spænding omtales ofte som VDO
Blandt de populære ikke-justerbare stabilisatorer er:
78xx– den mest berømte af alle positive spændingsstabilisatorer. Fås i forskellige spændingsversioner: 5, 6, 8, 9, 10, 12, 15, 18, 24 volt, VDO = 2V.
79xx– den mest populære af alle negative spændingsstabilisatorer. Produceret i spændingsversioner: 5, 6, 8, 9, 10, 12, 15, 18, 24 volt, VDO = 2V.
LM2940x– LDO positiv spændingsstabilisator. For spænding: 5, 8, 9, 10, 12, 15 volt, VDO = 0,5V.
Blandt de justerbare spændingsstabilisatorer er de mest berømte:
– udgangsspændingsområde fra 1,25 til 37 volt, VDO = 3V.
LM337– udgangsspændingsområde fra -1,25 – 37 volt, VDO = 5V.
Moderne spændingsstabilisatorer har forskellige slags termisk og strømbeskyttelse, som sikrer sikker drift og mindsker risikoen for, at kredsløb brænder ud.
Udover lineære stabilisatorer er der også en gruppe af skiftestabilisatorer. De adskiller sig naturligvis ved, at de har større effektivitet (der bruges mindre energi på varmetab). Interessant funktion er, at de giver dig mulighed for at hæve og sænke spændingerne, hvilket er meget nyttigt, når du forsyner mikrokredsløb fra et batteri.
Den lineære stabilisator er den originale form for stabiliserende strømforsyninger. For at sænke indgangsspændingsniveauet til en stabiliseret udgangsspænding bruger den variabel ledningsevne af det aktive elektroniske element. I dette tilfælde mister den lineære stabilisator meget energi i form af varme og opvarmes derfor.
Lineære strømforsyninger indtager en betydelig niche i applikationer, hvor den lave effektivitet af sådanne kilder ikke spiller en særlig rolle. Disse applikationer omfatter stationært jordudstyr, hvor tvungen luftkøling ikke er et problem. Dette omfatter også instrumenter, hvor måleren er så følsom over for elektrisk støj, at den kræver en elektrisk "støjsvag" strømkilde. Sådanne enheder omfatter lyd- og videoforstærkere, radioer osv. Lineære stabilisatorer er også populære som lokale, indbyggede stabilisatorer. I dette tilfælde kræver brættet kun nogle få watt, så et par watt mere tabt i varme kan modvirkes med en simpel heatsink. Hvis dielektrisk isolering fra AC-indgangskilden er påkrævet, leveres den af en AC-transformer eller et hovedstrømforsyningssystem.
Generelt er lineære regulatorer særligt nyttige til strømforsyningsapplikationer, der ikke kræver mere end 10 W udgangseffekt. Ved udgangseffekt større end 10 W bliver den nødvendige køleplade så omfangsrig og dyr, at den bliver mere attraktiv pulserende kilder ernæring.
Funktionsprincip for en lineær stabilisator
Alle strømforsyninger - uanset om de er lineære eller mere komplekse koblinger - fungerer på samme måde grundlæggende princip. Alle strømkilder er baseret på lukket sløjfe negativ feedback. Det eneste formål med dette kredsløb er at holde udgangsspændingen konstant.
Lineære stabilisatorer er kun step-down. Det betyder, at kildens indgangsspænding skal være højere end den nødvendige udgangsspænding. Der er to typer lineære stabilisatorer: parallel (shunt) og seriel (serie-pass). Parallel stabilisator (stabilisator med parallel forbindelse reguleringselement) er en spændingsstabilisator forbundet parallelt med belastningen. Den uregulerede strømkilde er forbundet til en højere spændingskilde, parallelregulatoren tager udgangsstrømmen for at opretholde DC spænding på belastningen under hensyntagen til den variable indgangsspænding og belastningsstrøm. Et almindeligt eksempel på en sådan stabilisator er en zenerdiodestabilisator. En serie lineær regulator er mere effektiv end en parallel regulator og bruger en aktiv halvleder mellem inputkilden og belastningen som et serieforbundet reguleringselement.
Et serieforbundet gennemføringselement fungerer i lineær tilstand. Det betyder, at den ikke er designet til at fungere i helt ON eller helt OFF-tilstand, men snarere fungerer i en "delvist ON"-tilstand. Den negative tilbagekoblingsløkke bestemmer mængden af ledningsevne, som paselementet skal acceptere for at give det nødvendige udgangsspændingsniveau.
Hjertet i den negative feedback-loop er en operationsforstærker med høj forstærkning kaldet en fejlspændingsforstærker. Dens formål er konstant at sammenligne forskellen mellem en meget stabil referencespænding og udgangsspændingen. Hvis denne forskel er mindst millivolt, justeres passageelementets elektriske ledningsevne. En stabil referencespænding leveres til den ikke-inverterende indgang på op-forstærkeren og er typisk lavere end udgangsspændingen. Udgangsspændingen opdeles til referenceniveauet og føres til den omvendte indgang på op-amp. Ved nominel udgangsspænding er midtpunktet af udgangsspændingsdeleren således identisk med referencespændingen.
Forspændingsforstærkerens forstærkning giver en spænding svarende til den stærkt øgede forskel mellem reference- og udgangsspændingen (fejlspænding). Fejlspændingen styrer direkte ledningsevnen af paselementet og bibeholder derved den nominelle udgangsspænding. Når belastningen stiger, falder udgangsspændingen, hvilket fører til en stigning i forstærkerens udgangseffekt, hvilket giver mere strøm til belastningen. Ligeledes vil udgangsspændingen stige, når belastningen falder, hvilket fejlforstærkeren vil reagere på ved at mindske strømmen gennem paselementet til belastningen.
Den hastighed, hvormed fejlforstærkeren reagerer på ændringer i output, og hvor nøjagtigt det nødvendige udgangsspændingsniveau opretholdes, afhænger af kompensationen af fejlforstærkerens tilbagekoblingssløjfe. Feedbackkompensation styres ved at placere elementer inde i spændingsdeleren og mellem fejlforstærkerens negative input og output. Dens design dikterer, hvor meget DC-forstærkning der udføres, hvilket igen bestemmer nøjagtigheden af udgangsspændingen. Det bestemmer også mængden af forstærkning ved øget frekvens og båndbredde, som igen bestemmer den tid, det tager at reagere på ændringer i udgangsbelastningen eller varigheden af transienter.
Som du kan se, er driftsprincippet for en lineær stabilisator meget enkelt. Nøjagtig det samme kredsløb er til stede i alle stabilisatorer, inklusive mere komplekse koblingsstabilisatorer. Spændingsfeedback-sløjfen udfører den endelige funktion af strømforsyningen: opretholdelse af udgangsspændingsniveauet.
Spændingsstabilisator- konverter elektrisk energi, hvilket gør det muligt at opnå en udgangsspænding, der ligger inden for specificerede grænser med væsentligt større udsving i indgangsspændingen og belastningsmodstanden.
Baseret på typen af udgangsspænding er stabilisatorer opdelt i DC- og AC-stabilisatorer. Som regel er typen af strømforsyning (konstant eller AC) er den samme som udgangsspændingen, selvom undtagelser er mulige.