Ved mængden af drejningsmoment asynkron motor Faseskiftet mellem strøm I 2 og e har stor indflydelse. d.s. E 2S rotor.
Lad os overveje tilfældet, når induktansen af rotorviklingen er lille, og derfor kan faseforskydningen forsømmes (fig. 223, a).
Statorens roterende magnetfelt er her erstattet af feltet for polerne N og S, der roterer, antag, i urets retning. Brug af reglen højre hånd, bestemme retningen af e. d.s. og strømme i rotorviklingen. Rotorstrømmene, der interagerer med det roterende magnetfelt, skaber et drejningsmoment. Retningen af kræfter, der virker på strømførende ledere, bestemmes af venstrehåndsreglen. Som det fremgår af tegningen, vil rotoren under påvirkning af kræfter rotere i samme retning som selve rotationsfeltet, altså med uret.
Lad os overveje det andet tilfælde, når induktansen af rotorviklingen er stor. I dette tilfælde er faseforskydningen mellem rotorstrømmen I 2 og e. d.s. E 2S rotoren vil også være stor. I fig. 223, b, er det magnetiske felt af statoren i en asynkronmotor stadig vist i form af poler N og S, der roterer med uret. Retningen af e.m. d.s. forbliver den samme som i fig. 223, a, men på grund af strømmens faseforsinkelse, aksen magnetisk felt Rotoren vil ikke længere falde sammen med statorens neutrale feltlinje, men vil forskydes i en bestemt vinkel mod magnetfeltets rotation. Dette vil føre til det faktum, at sammen med dannelsen af et drejningsmoment rettet i én retning, vil nogle ledere skabe et moddrejningsmoment.
Heraf kan det ses, at motorens samlede drejningsmoment med et faseskift mellem strøm og e. d.s. rotoren er mindre end i tilfældet, når I 2 og E 2S er i fase. Det kan bevises, at drejningsmomentet for en asynkronmotor kun bestemmes af den aktive komponent af rotorstrømmen, dvs. strømmen I 2 cos, og at det kan beregnes ved hjælp af formlen:
Ф m - magnetisk flux af statoren (og også omtrent lig med den resulterende magnetiske flux af den asynkrone motor);
Faseforskydningsvinkel mellem e. d.s. og viklingsfasestrøm
C er en konstant koefficient.
Efter udskiftning:
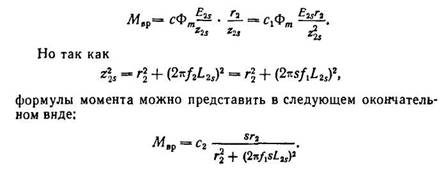
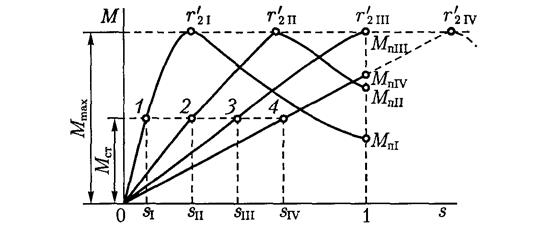
Af det sidste udtryk kan det ses, at drejningsmomentet for en asynkronmotor afhænger af slip.
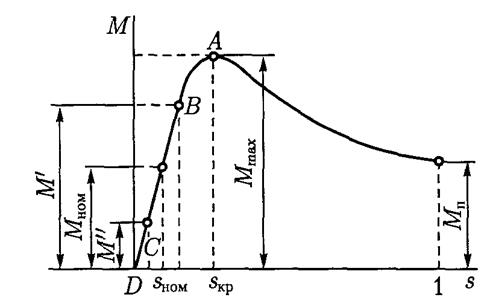
I fig. 224 viser kurve A for motordrejningsmomentets afhængighed af slip. Det fremgår tydeligt af kurven, at i startøjeblikket, når s=l og n = 0, er motorens drejningsmoment lille. Dette forklares af det faktum, at i startøjeblikket er frekvensen af strømmen i rotorviklingen den højeste, og den induktive reaktans af viklingen er høj. Som et resultat har cos en lille værdi (v
|
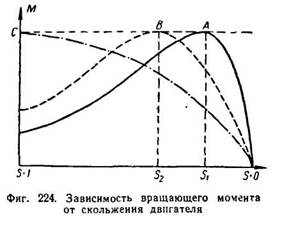
række 0,1-0,2). Derfor på trods af den store størrelse startstrøm, vil startmomentet være lille.
Ved et eller andet slip S 1 vil motorens drejningsmoment have en maksimal værdi. Med et yderligere fald i slip eller, med andre ord, med en yderligere stigning i motorens omdrejningstal, vil dens drejningsmoment hurtigt falde.
Når s = 0 glider, vil motorens rotationsmoment også være nul.
Det skal bemærkes, at en asynkronmotor praktisk talt ikke kan have nul slip. Dette er kun muligt, hvis rotoren er forsynet med udvendigt drejningsmoment i statorfeltets rotationsretning.
Startmomentet kan øges, hvis faseforskydningen mellem strømmen og e reduceres i startøjeblikket. d.s. rotor. Fra formlen
Det kan ses, at hvis den aktive modstand med en konstant induktiv modstand af rotorviklingen øges, så vil selve vinklen falde, hvilket vil føre til, at motorens drejningsmoment bliver større. Dette bruges i praksis til at øge motorens startmoment. I startøjeblikket indføres en aktiv modstand (startreostat) i rotorkredsløbet, som derefter fjernes, så snart motoren øger omdrejningstallet.
En stigning i startmomentet fører til, at det maksimale motormoment opnås med større slip (punkt S 2 i kurve B i fig. 224). Ved at øge den aktive modstand i rotorkredsløbet ved opstart er det muligt at sikre, at det maksimale drejningsmoment vil være i opstartsøjeblikket (s = 1 kurve C).
Drejningsmomentet for en asynkronmotor er proportionalt med kvadratet af spændingen, så selv et lille fald i spændingen er ledsaget af et kraftigt fald i drejningsmomentet.
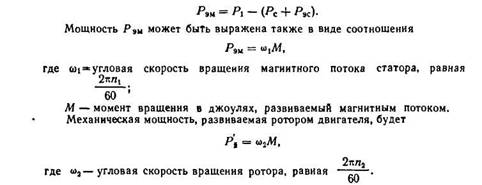
Effekt P 1 leveret til statorviklingen af en asynkronmotor er lig med:
![]()
hvor m 1 er antallet af faser.
Motorstatoren har følgende energitab:
1) i statorviklingen R es. =m1112r1;
2) i statorstål er der hysterese og hvirvelstrømme Р C .
Den effekt, der tilføres rotoren, er kraften fra det roterende magnetfelt, også kaldet elektromagnetisk effekt P eM.
Elektromagnetisk effekt er lig med forskellen mellem den tilførte effekt til motoren og tabene i motorstatoren, dvs.
|
Forskellen mellem R eM og repræsenterer elektriske tab i rotorviklingen Р eP, hvis vi forsømmer tab i rotorstålet på grund af deres ubetydelighed (frekvensen af rotormagnetiseringsvending er normalt meget lille):
Derfor er tabene i rotorviklingen proportionale med rotorslipningen.
Hvis fra mekanisk kraft udviklet af rotoren, fratrække de mekaniske tab P mx forårsaget af friktion i rotorlejerne, friktion med luft osv., samt yderligere tab P D, der opstår under belastning og forårsaget af vildfarne felter i rotoren, og tab forårsaget af: pulseringer af magnetfeltet i statortænderne og rotoren, så bliver det tilbage nyttig kraft på motorakslen, som vi betegner med P 2.
Effektiviteten af en asynkronmotor kan bestemmes af formlen:

Fra det sidste udtryk er det klart, at rotationsmomentet for en asynkronmotor er proportional med produktet af værdien af den roterende magnetiske flux, rotorstrømmen og cosinus af vinklen mellem f.eks. d.s. rotor og dens strøm,

Fra det ækvivalente kredsløb af en asynkronmotor opnås værdien af den reducerede rotorstrøm, som vi præsenterer uden bevis.
Drejningsmomentet udviklet af motoren er lig med den elektromagnetiske effekt divideret med det elektriske drevs synkrone rotationshastighed.
M = Pem/ω 0
Elektromagnetisk effekt er den effekt, der overføres gennem luftgabet fra statoren til rotoren, og den er lig med tabene i rotoren, som bestemmes af formlen:
P em = m I 2 2 (r 2 '/s)
m – antal faser.
M = M em = (Pm/ω 0) (I 2 ') 2 (r 2 '/s)
En elektromekanisk karakteristik af en asynkronmotor er afhængigheden af I2' af slip. Men da en asynkron maskine kun fungerer som en elektrisk motor, er hovedkarakteristikken den mekaniske egenskab.
M = Me m = (Pm/ω 0) (I 2 ') 2 (r 2 '/s) - et forenklet udtryk for den mekaniske karakteristik.
Ved at erstatte den aktuelle værdi i dette udtryk får vi: M = / [ω 0 [(r 1 + r 2 '/s) 2 + (x 1 + x 2 ') 2 ]]
I stedet for ω 0 er det nødvendigt at erstatte mekanisk hastighed, hvilket resulterer i, at antallet af polpar reduceres.
M = / [ω 0 [(r 1 + r 2 '/s) 2 + (x 1 + x 2 ') 2 ]] er ligningen for en asynkronmotors mekaniske karakteristika.
Når asynkronmotoren går i generatortilstand, bliver omdrejningshastigheden ω > ω 0, og slipningen negativ (s Når slipningen ændres fra 0 til +∞, kaldes tilstanden "elektromagnetisk bremsetilstand".
Ved at angive slipværdier fra o til +∞ får vi karakteristikken:
Fuldstændige mekaniske egenskaber for en asynkronmotor.
Som det kan ses af de mekaniske karakteristika, har den to yderpunkter: en i intervallet for slipændring i området fra 0 til +∞, den anden i intervallet fra 0 til -∞. dM/ds=0
M max = / ] + henviser til motortilstanden. – henviser til generatortilstanden.
M max =M cr M cr – kritisk moment.
Det slip, hvor momentet når sit maksimum kaldes kritisk slip, og det bestemmes af formlen: s cr = ±
Kritisk slip har samme betydning i både motor- og generatortilstand.
Værdien af Mcr kan opnås ved at erstatte værdien af den kritiske slip i drejningsmomentformlen.
Det glidende drejningsmoment lig med 1 kaldes startmomentet. Udtrykket for startmomentet kan opnås ved at erstatte 1 i formlen:
M p = / [ω 0 [(r 1 + r 2 ') 2 + (x 1 + x 2 ') 2 ]]
Da nævneren i maksimummomentformlen er flere størrelsesordener større end U f, er det generelt accepteret, at M cr ≡U f 2.
Den kritiske slip afhænger af værdien af den aktive modstand af rotorviklingen R 2 '. Startmomentet, som det kan ses af formlen, afhænger af den aktive modstand af rotoren r 2 '. Denne egenskab ved startmomentet bruges i asynkronmotorer med en viklet rotor, hvor startmomentet øges ved at indføre aktiv modstand i rotorkredsløbet.
7.Tomgangstransformer
Mode tomgangshastighed transformer er driftstilstanden, når en af transformatorens viklinger får strøm fra en kilde med vekselspænding og med åbne kredsløb af de andre viklinger. En rigtig transformer kan have denne funktionsmåde, når den er forbundet til netværket, og belastningen fra dens sekundære vikling er endnu ikke tændt. Strøm I 0 går gennem transformatorens primære vikling, samtidig med at der ikke er nogen strøm i sekundærviklingen, da dens kredsløb er åbent. Strøm I 0, der går gennem primærviklingen, skaber en sinusformet varierende bakke F 0 i det magnetiske kredsløb, som på grund af magnetiske tab halter i fase med strømmen med tabsvinklen δ. 
![]()
Den grafisk udtrykte afhængighed af det elektromagnetiske drejningsmoment på slip kaldes mekaniske egenskaber asynkronmotor (fig. 3.3).
Ris. 3.3. Mekaniske egenskaber for en asynkronmotor
En forenklet formel til beregning af det elektromagnetiske drejningsmoment for en asynkronmotor (Kloss-formel) kan bruges til at konstruere en mekanisk karakteristik
I dette tilfælde bestemmes den kritiske slip af formlen
![]()
hvor λ m = M max / M nom - motorens overbelastningskapacitet.
Ved beregning af de mekaniske egenskaber skal man huske på, at ved slipværdier, der overstiger den kritiske værdi, falder nøjagtigheden af beregningerne kraftigt. Dette forklares af en ændring i parametrene for det ækvivalente kredsløb af en asynkronmotor, forårsaget af magnetisk mætning af statoren og rotortænderne og en stigning i frekvensen af strømmen i rotorviklingen.
Formen af de mekaniske egenskaber af en asynkronmotor afhænger i vid udstrækning af spændingen påført til statorviklingen U 1 (fig. 3.4) og rotorviklingens aktive modstand r" 2 (Fig. 3.5).
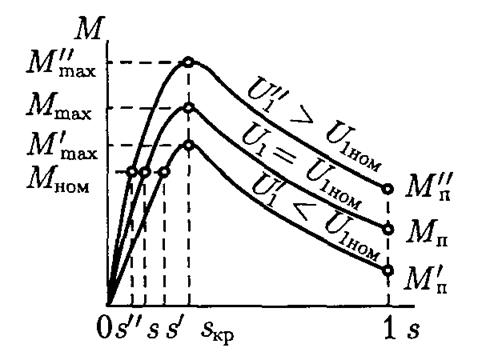
Ris. 3.4. Effekt af spænding U 1 om de mekaniske egenskaber for en asynkronmotor
Dataene i kataloger for asynkronmotorer indeholder normalt ikke information om parametrene for det ækvivalente kredsløb, hvilket gør det vanskeligt at bruge formler til beregning af det elektromagnetiske drejningsmoment. Derfor bruges formlen ofte til at beregne det elektromagnetiske drejningsmoment
Ris. 3.5. Påvirkning af modstand r" 2 om de mekaniske egenskaber for en asynkronmotor
De operationelle egenskaber af en asynkronmotor bestemmes af dens driftsegenskaber: afhængigheden af rotationshastigheden n 2, moment på akslen M 2, effektivitet og effektfaktor cosφ 1 fra motorens nyttelast R 2 .
Ved beregning af parametre for at bestemme ydeevnekarakteristika a synkrone motorer De bruger enten en grafisk metode, som er baseret på opbygningen af et cirkeldiagram, eller en analytisk metode.
Grundlaget for at udføre nogen af præstationsberegningsmetoderne er resultaterne af tomgangs- og kortslutningsforsøg. Hvis motoren er ved at blive designet, opnås disse data under dens beregning.
Ved beregning af modstandsmodstande r add, brugt i stator- eller viklede rotorkredsløb for at begrænse startstrømmen eller styre rotationshastigheden, brug princippet: for denne særlige asynkronmotor, slip s proportional med den aktive modstand af denne motors rotorkredsløb. I overensstemmelse hermed er ligestillingen sand
(r 2 + r ext) /s= r 2 /s nom,
Hvor r 2- aktiv modstand af selve rotorens vikling ved driftstemperatur; s- glider, når en modstand indføres i rotorkredsløbet med modstand r ext.
Ud fra dette udtryk får vi en formel til beregning af den aktive modstand af den ekstra modstand g til6, nødvendig for at opnå en given øget slip s ved en given (nominel) belastning:
r ext = r 2 (s/s nr. - 1).
Der er to metoder til at beregne startreostater: grafisk og analytisk.
Grafisk metode mere præcis, men kræver opbygning af en naturlig mekanisk karakteristik og startdiagram af motoren, som er forbundet med en stor mængde grafisk arbejde.
Analytisk metode beregning af startreostater er enklere, men mindre nøjagtig. Dette skyldes det faktum, at metoden er baseret på den antagelse, at arbejdssektionen af den naturlige mekaniske karakteristik af en asynkronmotor er lige. Men når glidningen er tæt på kritisk, forårsager denne antagelse en mærkbar fejl, som er mere signifikant, jo tættere på det indledende startmoment M 1 til maksimalt drejningsmoment M m ah. Derfor er den analytiske beregningsmetode kun anvendelig for værdier af det indledende startmoment M 1 < 0,7· M m ah .
Modstandsmodstande ved startreostatstadierne:
tredje r ext3 = r 2 (Am-1);
anden r ext2 = r ext3 λm;
først r ext1 = r ext2 λ m,
Hvor r 2 - aktiv modstand af faseviklingen af rotoren på en asynkronmotor,
Hvor E 2 og jeg 2nom - katalogdata for den valgte motorstørrelse.
Modstand af startreostaten i dens stadier:
første R PR1 = r ext1 + r ext2 + r ext3 ;
sekund R PR2 = r ext2 + r ext3
tredje R PR2 = r ext3.
For at begrænse startstrømmen af asynkronmotorer med egern-bur rotor specielle kredsløb til deres inklusion bruges med elementer, der begrænser startstrømmen. Alle disse metoder er baseret på at reducere spændingen, der leveres til statorviklingen. De fleste applikationer modtagne kredsløb med inklusion af modstande eller drosler i statorens lineære ledninger (se fig. 3.14, b Beregningen af den nødvendige modstand af disse elementer for et givet fald i startstrømmen a i forhold til dens naturlige værdi udføres ved hjælp af formlerne:
til modstande med aktiv modstand
R n = 
for choker
X L= 
Impedans motor i kortslutningstilstand Z k, ohm,
Z k =U 1 /jeg n
Her X til og r k - induktive og aktive komponenter af denne modstand
R k = Z k cosφ k ; x k =
Reducerer kunstigt startmoment ved tænding R eller L vil være
α m = α 2 jeg
Tabel 3.1
Således, hvis værdien α m er givet, som bestemmer værdien af det kunstige startmoment M" p, så for at beregne de tilsvarende værdier R p eller x L du kan bruge ovenstående formler ved at erstatte dem i stedet for α 2 jeg, værdi α m.
Elektrisk modstand Motorviklingerne i katalogerne svarer normalt til en temperatur på +20 °C. Men når man beregner motorernes egenskaber og parametre, skal modstanden af deres viklinger bringes til driftstemperatur. I overensstemmelse med den gældende standard tages driftstemperaturen afhængig af varmemodstandsklassen elektrisk isolering anvendt i motoren: med varmemodstandsklasse B er driftstemperaturen 75 °C, og med varmemodstandsklasse F og H - 115 °C. Omregning af viklingsmodstand til driftstemperatur udføres ved at gange viklingsmodstanden ved en temperatur på 20 °C med opvarmningskoefficienten k t:
r= r 20k t.
Værdierne af denne koefficient tages afhængigt af formålet med motorerne og deres dimensioner (højden af rotationsaksen) (tabel 3.1).
SYNKRONE MASKINER
GRUNDKONCEPT
Et karakteristisk træk synkrone maskiner er en stiv forbindelse mellem rotorhastigheden n 1 og frekvens AC i statorviklingen f 1:
n 1 = f 1 60/ r.
Med andre ord roterer statorens roterende magnetfelt og synkronmaskinens rotor synkront, altså med samme frekvens.
Ifølge deres design er synkrone maskiner opdelt i fremspringende pol og ikke-fremspringende pol. I synkrone maskiner med fremspringende poler har rotoren fremtrædende poler, hvorpå feltviklingsspolerne, drevet af DC. Et karakteristisk træk ved sådanne maskiner er forskellen i magnetisk modstand langs den langsgående akse (langs polernes akse) og langs den tværgående akse (langs aksen, der passerer i det interpolære rum). Magnetisk modstand mod statorflux langs den langsgående akse dd meget mindre magnetisk modstand mod statorflux langs den tværgående akse qq. I synkrone maskiner med ikke-fremspringende poler er de magnetiske modstande langs længde- og tværakserne de samme, da luftgabet på disse maskiner rundt om statorens omkreds er det samme.
Designet af statoren på en synkronmaskine er i princippet ikke forskellig fra statoren på en asynkron maskine. I statorviklingen, under drift af maskinen, induceres EMF, og strømme flyder, som skaber magnetomotorisk kraft (MF), hvis maksimale værdi er
F 1 =0,45m 1 jeg 1 w 1 k rev1 / r
Denne MMF skaber et roterende magnetfelt, og i luftgabet δ maskine, skabes magnetisk induktion, hvis fordelingsgraf inden for hver polopdeling t afhænger af rotorens design (fig. 4.1).
For en synkron maskine med fremspringende pol er spændingsligningen gyldig:
Ú 1 =Ė 0 + Ė 1 d+ Ė 1 q + Ė σ1 – İ 1 r 1
Hvor Ė 0 - synkronmaskinens hoved-EMF, proportional med synkronmaskinens hovedmagnetiske flux F 0 ; Ė 1 d - EMF for ankerreaktionen af en synkronmaskine langs længdeaksen, proportional med MMF af ankerreaktionen langs længdeaksen F 1d; Ė σ1 - EMF for ankerreaktionen langs den tværgående akse, proportional med MMF af ankerreaktionen langs den tværgående akse F 1 q; Ė σ1 - lækage-emf på grund af tilstedeværelsen af magnetisk lækageflux F 0, er størrelsen af denne EMF proportional med den induktive lækagemodstand af statorviklingen X 1
Ė σ1 = jİ 1 r
İ 1 r 1 - aktivt spændingsfald i statorfaseviklingen forsømmes normalt denne værdi ved løsning af problemer på grund af dens lille værdi.
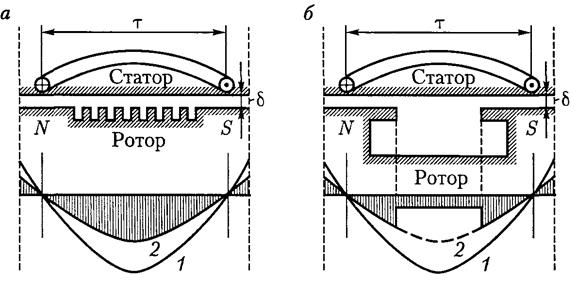
Ris. 4.1. Grafer over magnetisk induktionsfordeling langs den tværgående akse
ikke-fremspringende stang ( EN) og fremtrædende pol ( b)synkrone maskiner:
1 - MDS tidsplan; 2 - magnetisk flux graf
For en ikke-fremspringende pol synkronmaskine har spændingsligningen formen
Ú 1 =Ė 0 + Ė c – İ 1 r 1
Her
Ė c = Ė 1 + Ė σ1
Hvor Ė 1 - EMF-reaktion af ankeret på en ikke-fremspringende-polet synkronmaskine. Spændingsligningerne betragtet ovenfor svarer til spændingsvektordiagrammer. Disse diagrammer skal konstrueres for at bestemme enten maskinens hovedemk E 0, eller statorviklingsspænding U 1. Man skal huske på, at spændingsligningerne og de tilsvarende vektordiagrammer ikke tager højde for den magnetiske mætning af magnetkredsløbet i en synkronmaskine, hvilket som bekendt påvirker værdien af induktive reaktanser, hvilket får dem til at formindske. At tage højde for denne mætning er en vanskelig opgave, derfor bruger de normalt ved beregning af EMF og spændinger for synkrone maskiner praktisk diagram EMF, som tager højde for mætningstilstanden af det magnetiske system forårsaget af virkningen af ankerreaktionen, når den synkrone maskine er belastet. Når man konstruerer et praktisk EMF-diagram, dekomponeres den magnetiserende kraft af ankerreaktionen ikke i langsgående og tværgående komponenter, derfor kan dette diagram bruges både i beregningerne af fremspringende pol og ikke-fremspringende pol maskiner.
Ved løsning af problemer forbundet med enten synkrongeneratorer forbundet parallelt med netværket eller med synkronmotorer, bruger de vinkelegenskaber synkrone maskiner, der repræsenterer afhængigheden af det elektromagnetiske drejningsmoment M på belastningsvinklen θ. Det skal huskes, at i synkrone maskiner med fremtrædende pol fungerer to punkter: det vigtigste M grundlæggende og reaktive M p, og i ikke-fremspringende stangmaskiner - kun hovedpunktet:
![]()
Belastningsvinklen θ nom svarer til det nominelle drejningsmoment M nom. Det maksimale drejningsmoment for en synkronmaskine bestemmer synkronmaskinens overbelastningskapacitet, hvilket er vigtigt både for synkrongeneratorer, der arbejder parallelt med netværket og for synkronmotorer. I ikke-fremspringende polede synkronmaskiner svarer det maksimale drejningsmoment til belastningsvinklen θ = 90°, i fremspringende polsmaskiner θ cr< 90° и обычно составляет 60 - 80° в зависимости от соотношения основного и реактивного elektromagnetiske momenter denne bil.
For at beregne den kritiske belastningsvinkel, som bestemmer overbelastningskapaciteten af fremspringende pole synkronmaskiner, kan du bruge udtrykket.